一种基于压力阀和流量阀的主动隔振系统及设备的制作方法
本技术涉及半导体设备隔振,尤其是涉及一种基于压力阀和流量阀的主动隔振系统及设备。
背景技术:
1、半导体设备作为芯片领域的核心推动力,从晶圆制造到封装测试,再到质量控制和制程过程,半导体设备的的重要性不言而喻,在半导体设备中,基座的微振动、操作者的直接扰动、设备自身运动产生的惯性力扰动,会影响半导体设备的精度,进而影响产品的质量。
2、为了实现半导体设备的隔振,现有技术公开了如被动隔振、接触式隔振等方式,但这类方式无法满足低频隔振需求,电磁气浮式相对较复杂,又如现有技术中公开了一种隔振设备,其包括工作平台、支撑平台,还包括控制模块,所述的工作平台与所述的支撑平台之间设置有多个磁致伸缩作动器,所述的工作平台上设置有加速度传感器,所述的加速度传感器用于检测所述的工作平台的振动信号,并将所述的振动信号传递给所述的控制模块,所述的控制模块根据所述的振动信号控制所述的磁致伸缩作动器的动作,进而抵消所述的工作平台的振动。
3、针对上述中的相关技术,通过加速度传感器检测工作平台的振动信号,并根据振动信号,经由控制模块控制磁致伸缩作动器提供主动控制力的作用,上述隔振结构还需要进一步的安装传统的被动隔振元件如弹簧或阻尼器等,这使得隔振器结构较为复杂,控制难度高,不便于控制隔振刚度。
技术实现思路
1、为了便于实现隔振刚度的主动调整,本技术提供一种基于压力阀和流量阀的主动隔振系统及设备。
2、本技术提供的一种基于压力阀和流量阀的主动隔振系统及设备采用如下的技术方案:
3、第一方面,本技术提供一种基于压力阀和流量阀的主动隔振系统,包括:
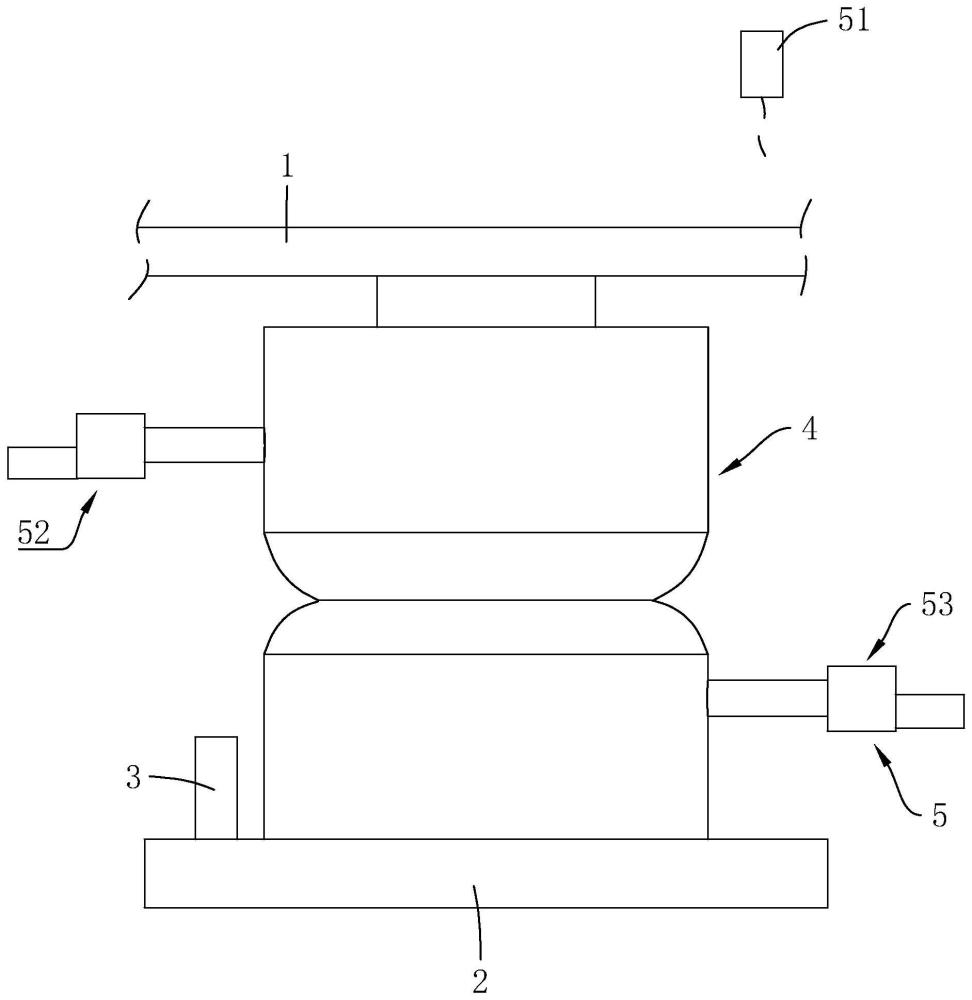
4、刚性安装板,所述刚性安装板设置于设备本体下方,并用于与设备本体连接;
5、多个承重底座,所述承重底座分布于所述刚性安装板正下方,且所述承重底座上连接有垂直位移传感器,所述垂直位移传感器用于检测所述刚性安装板的垂直位移;
6、多个空气弹簧,所述空气弹簧位于所述刚性安装板和所述承重底座之间,且所述空气弹簧与所述承重底座连接,所述空气弹簧的滚动活塞与所述刚性安装板连接;
7、压强控制单元,所述压强控制单元与所述垂直位移传感器电连接,且所述压强控制单元与所述空气弹簧内腔连通,用于根据所述垂直位移传感器的电信号控制所述空气弹簧内腔中的压强。
8、通过采用上述技术方案,设备本体由于基座的微振动、操作者的直接扰动或者是设备自身工作时产生的惯性力扰动等诸多因素而发生振动时,需要进行隔振处理以降低振动对设备加工精度的影响,刚性安装板与设备本体进行连接,当设备本体发生振动,垂直位移传感器检测到承重底座处对应区域的刚性安装板的垂直位移量,然后多个垂直位移传感器将多点检测的位移数据传输给压强控制单元,压强控制单元将多个位移数据进行集中分析处理,其集中分析处理运算逻辑为:“通过模态空间转换运算可将工作空间的运动信号即位移数据转换为模态空间的运动信号,由于在模态空间中隔振系统的三自由度动力学方程是互相解耦的,转换后的模态空间的运动和力测量信号不必以矢量的含义存在,模态空间的运动和力测量信号的各个分量可以分别作为模态空间三个独立自由度的运动和力的测量;”,此时压强控制根据振动强度控制空气弹簧内的压强,使空气弹簧内的气体压强根据振动强度发生对应变化,进而改变空气弹簧的刚度,起到隔振效果;设计的基于压力阀和流量阀的主动隔振系统,通过刚性安装板便于与设备本体进行连接,通过承重底座便于安装空气弹簧和垂直位移传感器,通过垂直位移传感器便于检测刚性安装板的垂直位移和水平扭转,通过空气弹簧便于配合压强控制单元实现对刚性安装板的隔振,在简化隔振系统结构的同时便于实现隔振刚度的主动调整。
9、在一个具体的可实施方案中,所述压强控制单元包括
10、控制器,所述控制器和所述垂直位移传感器电连接;
11、多个进气阀,所述进气阀的进气端用于与气源连通,出气端用于与所述空气弹簧内腔连通,且所述进气阀用于与所述控制器电连接;
12、多个排气阀,所述排气阀与所述空气弹簧内腔连通,用于排出所述空气弹簧内腔中的气体,且所述排气阀用于与所述控制器电连接。
13、通过采用上述技术方案,设计的压强控制单元,可以根据多个垂直位移传感器传输的电信号,控制进气阀或者是排气阀的启闭,进而改变空气弹簧内腔中的气体压强,实现空气弹簧刚度的变化,以实现对振动强度的适配。
14、在一个具体的可实施方案中,所述进气阀设置为流量阀。
15、通过采用上述技术方案,设计的设置为流量阀的进气阀,可以测量输入空气弹簧内腔中的气体体积,进而精准化的控制空气弹簧的刚度,提高隔振效果。
16、在一个具体的可实施方案中,所述排气阀设置为压力阀。
17、通过采用上述技术方案,设计的设置为压力阀的排气阀,可以通过改变压力阀的压强触发阀值,精准化的控制空气弹簧内腔的气体压强,进而精准化的控制空气弹簧的刚度,提高隔振效果。
18、在一个具体的可实施方案中,多个所述承重底座呈矩阵式分布于所述刚性安装板正下方。
19、通过采用上述技术方案,可以实现对刚性安装板的可靠支撑,并且可以扩大多个垂直位移传感器所构成的测量平面的面积,提高对刚性安装板垂直位移或者是水平扭转的测量敏感度,提高隔振效果和响应及时性。
20、第二方面,本技术提供一种设备,包括:
21、设备本体;
22、刚性安装板,所述刚性安装板设置于所述设备本体下方,并用于与所述设备本体可拆卸固定连接;
23、多个承重底座,所述承重底座分布于所述刚性安装板正下方,且所述承重底座上连接有垂直位移传感器,所述垂直位移传感器用于检测所述刚性安装板的垂直位移;
24、多个空气弹簧,所述空气弹簧位于所述刚性安装板和所述承重底座之间,且所述空气弹簧与所述承重底座连接,所述空气弹簧的滚动活塞与所述刚性安装板连接;
25、压强控制单元,所述压强控制单元与所述垂直位移传感器电连接,且所述压强控制单元与所述空气弹簧内腔连通,用于根据所述垂直位移传感器的电信号控制所述空气弹簧内腔中的压强。
26、通过采用上述技术方案,设备本体由于基座的微振动、操作者的直接扰动或者是设备本体自身工作时产生的惯性力扰动等诸多因素而发生振动时,需要进行隔振处理以降低振动对设备加工精度的影响,刚性安装板与设备本体进行连接,当设备本体发生振动,垂直位移传感器检测到承重底座处对应区域的刚性安装板的垂直位移量,然后多个垂直位移传感器将多点检测的位移数据传输给压强控制单元,压强控制单元将多个位移数据进行集中分析处理,其集中分析处理运算逻辑为:“通过模态空间转换运算可将工作空间的运动信号即位移数据转换为模态空间的运动信号,由于在模态空间中隔振系统的三自由度动力学方程是互相解耦的,转换后的模态空间的运动和力测量信号不必以矢量的含义存在,模态空间的运动和力测量信号的各个分量可以分别作为模态空间三个独立自由度的运动和力的测量;”,此时压强控制根据振动强度控制空气弹簧内的压强,使空气弹簧内的气体压强根据振动强度发生对应变化,进而改变空气弹簧的刚度,起到主动隔振效果;设计的设备,通过刚性安装板便于与设备本体进行连接,通过承重底座便于安装空气弹簧和垂直位移传感器,通过垂直位移传感器便于检测刚性安装板的垂直位移和水平扭转,通过空气弹簧便于配合压强控制单元实现对刚性安装板的隔振,在简化隔振系统结构的同时便于实现隔振刚度的主动调整,进而实现设备本体的隔振,提高设备本体加工产品的精度。
27、在一个具体的可实施方案中,所述压强控制单元包括
28、控制器,所述控制器和所述垂直位移传感器电连接;
29、多个进气阀,所述进气阀的进气端用于与气源连通,出气端用于与所述空气弹簧内腔连通,且所述进气阀用于与所述控制器电连接;
30、多个排气阀,所述排气阀与所述空气弹簧内腔连通,用于排出所述空气弹簧内腔中的气体,且所述排气阀用于与所述控制器电连接。
31、通过采用上述技术方案,设计的压强控制单元,可以根据多个垂直位移传感器传输的电信号,控制进气阀或者是排气阀的启闭,进而改变空气弹簧内腔中的气体压强,实现空气弹簧刚度的变化,以实现对振动强度的适配。
32、在一个具体的可实施方案中,所述进气阀设置为流量阀。
33、通过采用上述技术方案,设计的设置为流量阀的进气阀,可以测量输入空气弹簧内腔中的气体体积,进而精准化的控制空气弹簧的刚度,提高隔振效果。
34、在一个具体的可实施方案中,所述排气阀设置为压力阀。
35、通过采用上述技术方案,设计的设置为压力阀的排气阀,可以通过改变压力阀的压强触发阀值,精准化的控制空气弹簧内腔的气体压强,进而精准化的控制空气弹簧的刚度,提高隔振效果。
36、在一个具体的可实施方案中,多个所述承重底座呈矩阵式分布于所述刚性安装板正下方。
37、通过采用上述技术方案,可以实现对刚性安装板的可靠支撑,并且可以扩大多个垂直位移传感器所构成的测量平面的面积,提高对刚性安装板垂直位移或者是水平扭转的测量敏感度,提高隔振效果和响应及时性。
38、综上所述,本技术包括以下至少一种有益技术效果:
39、1.设计的基于压力阀和流量阀的主动隔振系统,通过刚性安装板便于与设备本体进行连接,通过承重底座便于安装空气弹簧和垂直位移传感器,通过垂直位移传感器便于检测刚性安装板的垂直位移和水平扭转,通过空气弹簧便于配合压强控制单元实现对刚性安装板的隔振,在简化隔振系统结构的同时便于实现隔振刚度的主动调整。
40、2.设计的基于压力阀和流量阀的主动隔振系统,可以根据多个垂直位移传感器传输的电信号,控制进气阀或者是排气阀的启闭,进而改变空气弹簧内腔中的气体压强,实现空气弹簧刚度的变化,以实现对振动强度的适配。
41、3.设计的基于压力阀和流量阀的主动隔振系统,可以实现对刚性安装板的可靠支撑,并且可以扩大多个垂直位移传感器所构成的测量平面的面积,提高对刚性安装板垂直位移或者是水平扭转的测量敏感度,提高隔振效果和响应及时性。
- 还没有人留言评论。精彩留言会获得点赞!