一种用于地质测绘的机器人的制作方法
本发明涉及地质测绘设备,特别是一种用于地质测绘的机器人。
背景技术:
1、在井探工程测量中,由于地下巷道中光线较暗,地下环境不明,工作人员下去进行测绘具有较大的安全隐患,并且工作人员需要携带测量仪器不断变换位置才能测量到不同的数据,测绘效率较低,劳动强度大,因此专门研制出用于井探工程测量中的测绘机器人。
2、经检索,现有专利公开号为cn108534763b的一种地质测绘用机器人,采用双座结构,各移动座的运动机构为履带式,移动至相应位置后通过移动机构控制挖坑模进行定定位,再通过液压机构压下,通过挖坑模内螺旋挖掘刀片进行挖坑处理,螺旋挖掘刀片的转轴内有活动测量仪,挖坑完成后测量仪伸入坑内进行测绘。
3、但上述专利存在缺陷,结构防护性差,不能根据使用状态控制测绘结构的位置,移动调节测绘位置时测绘结构外露容易出现刮蹭损坏,破坏结构的美观性,进行定点测绘时底部移动结构着地支撑不稳定,容易位移影响测绘的准确性,且结构之间联动性差,测绘成本高,降低了地质测绘机器人的使用效率。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种用于地质测绘的机器人,保证测绘机器人移动时测绘结构更安全,测绘时更稳定不会位移影响测绘数据的准确性,联动性更高,降低测绘成本。
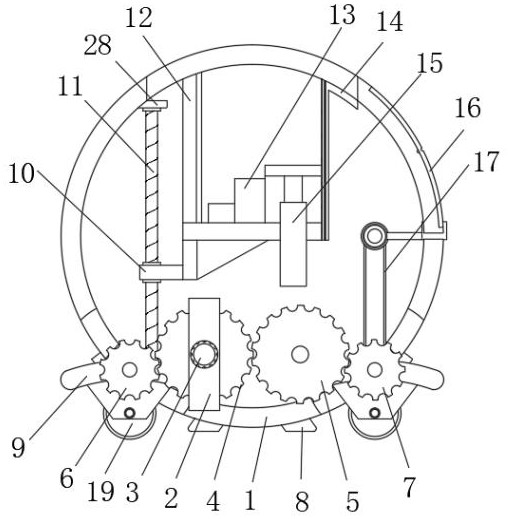
2、实现本发明目的的技术解决方案为:一种用于地质测绘的机器人,包括外壳和传动轮组,所述外壳底部一边的一侧外壁固定连接有支架,所述支架的一边外壁安装有电机,所述外壳底部的一边外壁从左到右依次安装有齿轮三、齿轮一、齿轮二和齿轮四,所述电机输出轴的一端通过联轴器与齿轮一连接,所述齿轮三的内壁固定连接有活动杆一,所述活动杆一的外壁固定连接有蜗杆,所述外壳顶部的一侧内壁固定连接有固定板,所述固定板的底端外壁开设有圆形槽,所述圆形槽的内壁滑动连接有单向螺杆,所述单向螺杆的底部外壁固定连接有蜗轮,所述蜗杆和蜗轮通过齿纹相啮合,所述单向螺杆的外壁通过螺纹连接有升降架,所述升降架顶端的另一侧外壁固定连接有安装架,所述齿轮四的内壁固定连接有活动杆二,所述活动杆二固定连接于传动轮组底部内壁,所述外壳另一侧的两边内壁均开设有安装槽,所述安装槽的内壁均滑动连接有双向螺杆,所述双向螺杆固定连接于传动轮组顶部内壁,所述双向螺杆的两边外壁均通过螺纹连接有滑动架,所述滑动架顶部的另一侧外壁均安装有太阳能板一。
3、在某些实施例中,所述外壳底部两边的两侧外壁均开设有安装孔,所述活动杆一和活动杆二的两边外壁均固定连接有安装板,所述安装板的底端外壁均安装有行走轮,所述安装板和行走轮均与安装孔的尺寸相适配。
4、在某些实施例中,所述安装架的顶部呈弧形设置,所述外壳的顶端外壁开设有进出口,所述安装架与进出口的尺寸相适配,所述安装架底部另一侧的两边内壁均安装有液压杆,所述液压杆活塞杆的一端均固定连接有支撑板,所述支撑板的另一边外壁均固定连接有测距传感器,所述测距传感器的外壁安装有测绘摄像头和探照灯。
5、在某些实施例中,所述齿轮一和齿轮二通过齿纹相啮合,所述齿轮一和齿轮三通过齿纹相啮合,所述齿轮二和齿轮四通过齿纹相啮合,所述外壳的另一侧外壁开设有滑槽,所述滑动架均滑动连接于滑槽内壁。
6、在某些实施例中,所述外壳顶部另一侧的两边外壁均开设有弧形槽,所述弧形槽的内壁均安装有太阳能板二,所述太阳能板一均与太阳能板二滑动相连接,所述外壳呈圆柱形设置,所述太阳能板一和太阳能板二均与外壳的尺寸相适配,所述外壳的底部内壁安装有蓄电池,所述蓄电池均与太阳能板一、太阳能板二和测距传感器电连接。
7、在某些实施例中,所述外壳底部的两侧外壁均开设有维护孔,所述维护孔均与传动轮组和蜗杆的尺寸相适配,所述维护孔的外壁均固定连接有防护壳。
8、在某些实施例中,所述外壳底端的两侧外壁均固定连接有支撑脚,所述支撑脚的底端外壁均粘接有防滑垫,所述支撑脚均与行走轮的高度相适配。
9、在某些实施例中,所述外壳顶部的另一侧内壁固定连接有弧形板,所述弧形板底端的一侧外壁固定连接有限位板,所述限位板的一侧外壁粘接有擦拭垫,所述限位板和弧形板均与安装架的尺寸相适配。
10、本发明与现有技术相比,其显著优点是:
11、其一:本发明通过设置有外壳、安装板、行走轮、单向螺杆、升降架、双向螺杆和传动轮组,机器人外壳呈圆筒形提高结构防护效果,移动时测绘结构被收纳在外壳内,行走轮翻转着地支撑,在行走电机的作用下控制移动,到达测绘位置时,电机作用控制齿轮结构的旋转,通过结构的联动使测绘结构从外壳内部移出,行走轮等结构被收回外壳内部,外壳底部支撑脚着地支撑提高结构稳定,同时通过结构的联动还使两块太阳能板一分离,露出被遮挡的太阳能板二同时进行发电,测绘完成改变位置时,电机控制齿轮反向旋转即可通过联动控制结构的复位,保证测绘机器人移动时测绘结构更安全,测绘时更稳定不会位移影响测绘数据的准确性,联动性更高,降低测绘成本,提高了地质测绘机器人的使用效率;
12、其二:本发明通过设置有防护壳、限位板、擦拭垫和液压杆,通过液压杆控制支撑板的升降,从而控制测距传感器、探照灯和测绘摄像头的升降,根据具体地质测绘需求进行调节,在外壳另一侧顶部内壁设置有弧形板和限位板,在安装架升降时对其进行支撑限位,保证安装架稳定直线移动,安装架上粘接的擦拭垫在安装架每次升降过程中对测绘结构表面粘附的灰尘进行清理,保证测绘的精度,外壳底部两侧设置的防护壳与蜗轮、蜗杆和传动轮组的位置相对应,通过螺钉连接的防护壳方便拆装维护,进一步提高了测绘机器人的使用寿命;
13、解决了结构防护性差,不能根据使用状态控制测绘结构的位置,移动调节测绘位置时测绘结构外露容易出现刮蹭损坏,破坏结构的美观性,进行定点测绘时底部移动结构着地支撑不稳定,容易位移影响测绘的准确性,且结构之间联动性差,测绘成本高的问题。
技术特征:
1.一种用于地质测绘的机器人,包括外壳(1)和传动轮组(17),其特征在于,所述外壳(1)底部一边的一侧外壁固定连接有支架(2),所述支架(2)的一边外壁安装有电机(3),所述外壳(1)底部的一边外壁从左到右依次安装有齿轮三(6)、齿轮一(4)、齿轮二(5)和齿轮四(7),所述电机(3)输出轴的一端通过联轴器与齿轮一(4)连接,所述齿轮三(6)的内壁固定连接有活动杆一(20),所述活动杆一(20)的外壁固定连接有蜗杆(21),所述外壳(1)顶部的一侧内壁固定连接有固定板(28),所述固定板(28)的底端外壁开设有圆形槽,所述圆形槽的内壁滑动连接有单向螺杆(11),所述单向螺杆(11)的底部外壁固定连接有蜗轮(22),所述蜗杆(21)和蜗轮(22)通过齿纹相啮合,所述单向螺杆(11)的外壁通过螺纹连接有升降架(10),所述升降架(10)顶端的另一侧外壁固定连接有安装架(12),所述齿轮四(7)的内壁固定连接有活动杆二(23),所述活动杆二(23)固定连接于传动轮组(17)底部内壁,所述外壳(1)另一侧的两边内壁均开设有安装槽,所述安装槽的内壁均滑动连接有双向螺杆(25),所述双向螺杆(25)固定连接于传动轮组(17)顶部内壁,所述双向螺杆(25)的两边外壁均通过螺纹连接有滑动架(24),所述滑动架(24)顶部的另一侧外壁均安装有太阳能板一(16)。
2.根据权利要求1所述的一种用于地质测绘的机器人,其特征在于:所述外壳(1)底部两边的两侧外壁均开设有安装孔,所述活动杆一(20)和活动杆二(23)的两边外壁均固定连接有安装板(9),所述安装板(9)的底端外壁均安装有行走轮(19),所述安装板(9)和行走轮(19)均与安装孔的尺寸相适配。
3.根据权利要求1所述的一种用于地质测绘的机器人,其特征在于:所述安装架(12)的顶部呈弧形设置,所述外壳(1)的顶端外壁开设有进出口(29),所述安装架(12)与进出口(29)的尺寸相适配,所述安装架(12)底部另一侧的两边内壁均安装有液压杆(15),所述液压杆(15)活塞杆的一端均固定连接有支撑板(31),所述支撑板(31)的另一边外壁均固定连接有测距传感器(13),所述测距传感器(13)的外壁安装有测绘摄像头和探照灯。
4.根据权利要求1所述的一种用于地质测绘的机器人,其特征在于:所述齿轮一(4)和齿轮二(5)通过齿纹相啮合,所述齿轮一(4)和齿轮三(6)通过齿纹相啮合,所述齿轮二(5)和齿轮四(7)通过齿纹相啮合,所述外壳(1)的另一侧外壁开设有滑槽(30),所述滑动架(24)均滑动连接于滑槽(30)内壁。
5.根据权利要求1所述的一种用于地质测绘的机器人,其特征在于:所述外壳(1)顶部另一侧的两边外壁均开设有弧形槽,所述弧形槽的内壁均安装有太阳能板二(26),所述太阳能板一(16)均与太阳能板二(26)滑动相连接,所述外壳(1)呈圆柱形设置,所述太阳能板一(16)和太阳能板二(26)均与外壳(1)的尺寸相适配,所述外壳(1)的底部内壁安装有蓄电池,所述蓄电池均与太阳能板一(16)、太阳能板二(26)和测距传感器(13)电连接。
6.根据权利要求1所述的一种用于地质测绘的机器人,其特征在于:所述外壳(1)底部的两侧外壁均开设有维护孔,所述维护孔均与传动轮组(17)和蜗杆(21)的尺寸相适配,所述维护孔的外壁均固定连接有防护壳(18)。
7.根据权利要求1所述的一种用于地质测绘的机器人,其特征在于:所述外壳(1)底端的两侧外壁均固定连接有支撑脚(8),所述支撑脚(8)的底端外壁均粘接有防滑垫,所述支撑脚(8)均与行走轮(19)的高度相适配。
8.根据权利要求1所述的一种用于地质测绘的机器人,其特征在于:所述外壳(1)顶部的另一侧内壁固定连接有弧形板(14),所述弧形板(14)底端的一侧外壁固定连接有限位板(32),所述限位板(32)的一侧外壁粘接有擦拭垫(27),所述限位板(32)和弧形板(14)均与安装架(12)的尺寸相适配。
技术总结
本发明涉及地质测绘设备技术领域,具体是一种用于地质测绘的机器人,包括外壳和传动轮组,所述外壳底部一边的一侧外壁固定连接有支架,所述支架的一边外壁安装有电机,所述外壳底部的一边外壁从左到右依次安装有齿轮三、齿轮一、齿轮二和齿轮四,所述电机输出轴的一端通过联轴器与齿轮一连接,所述齿轮三的内壁固定连接有活动杆一,所述活动杆一的外壁固定连接有蜗杆,所述外壳顶部的一侧内壁固定连接有固定板,所述固定板的底端外壁开设有圆形槽;本发明保证测绘机器人移动时测绘结构更安全,测绘时更稳定不会位移影响测绘数据的准确性,联动性更高,降低测绘成本,提高了地质测绘机器人的使用效率。
技术研发人员:赵翔,史志强,冉典
受保护的技术使用者:山东省地矿工程勘察院(山东省地质矿产勘查开发局八〇一水文地质工程地质大队)
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!