一种具有多位置姿态的安瓿瓶夹持输送组件的制作方法
1.本实用新型属于医疗器械技术领域,具体涉及一种具有多位置姿态的安瓿瓶夹持输送组件。
背景技术:
2.安瓿瓶是用于盛装药液的小型玻璃容器,其结构包括瓶体和瓶头,以及位于瓶体、瓶头之间凹陷部分的瓶颈,容量一般为1~25ml,安瓿瓶的内部一般存储为注射用的药液。目前,医院静脉输液药物的配制一般由人工完成,易造成药物污染对患者产生危害,同时在需要大量安瓿瓶药液配制的场合,配药效率低,很难满足医院的实际需求,增加患者治疗时间。
3.人工配制药液的过程繁琐,需要对安瓿瓶进行切割、消毒和开瓶后才能用注射器抽取药液,这个过程中医护人员工作强度大,而且人工配制过程中医护人员需要接触药液,尤其是在配制肿瘤治疗等有毒药物时,容易对配药人员造成慢性伤害,导致职业病。
4.在安瓿瓶开启过程中,需要提供安瓿瓶输送路径,以产生相对运动,进而完成安瓿瓶瓶颈切割、消毒、折断等操作,基于此,本申请提供了一种具有多位置姿态的安瓿瓶夹持输送组件。
技术实现要素:
5.针对现有技术的缺陷,本实用新型提供了一种具有多位置姿态的安瓿瓶夹持输送组件,其具有结构紧凑、可操作性强的优点。
6.为了实现上述目的,本实用新型提供了一种具有多位置姿态的安瓿瓶夹持输送组件,其特征在于,包括工作台、滑座、滑架、转动架、安瓿瓶夹爪和多个驱动器件,在工作台上设有水平的第一导轨,滑座通过第一导轨设置于工作台上,在滑座上设有竖直的第二导轨,滑架通过第二导轨设置于滑座上,滑架上设有转轴,转动架通过转轴设置于滑架上,安瓿瓶夹爪设置于转动架上并且能够打开与闭合,多个驱动器件分别作用于滑座、滑架与转动架以分别驱动滑座进行水平滑移、滑架进行竖直升降、转动架进行往复回转。
7.根据本实用新型的另一种具体实施方式,转轴位于水平面内,转轴的轴线与第一导轨之间相互垂直。
8.根据本实用新型的另一种具体实施方式,作用于滑座的驱动器件为电动丝杆滑块结构。
9.根据本实用新型的另一种具体实施方式,采用同一驱动器件驱动滑架和转动架,驱动器件为能够沿第一导轨长度方向向前或者向后的推板,其中滑架上设有第一滚轮,推板具有与第一滚轮配合以驱动滑架在第二导轨上进行升降的斜面部,转动架上设有第二滚轮,推板具有与第二滚轮配合以驱动转动架围绕转轴进行转动的拨动部。
10.根据本实用新型的另一种具体实施方式,滑架与滑座之间连接有第一弹簧,第一弹簧驱使第一滚轮压紧在斜面部。
11.根据本实用新型的另一种具体实施方式,转动架与滑架或者滑座之间连接有第二弹簧,第二弹簧驱使转动架在第二滚轮与拨动部之间配合失效时能够自动回位至初始位置状态。
12.根据本实用新型的另一种具体实施方式,斜面部与拨动部位于推板的同一侧。
13.本实用新型具备以下有益效果:
14.本实用新型中由安瓿瓶夹爪所夹持的安瓿瓶能够进行水平的滑移、竖直的升降以及倾斜侧翻,一方面能够将安瓿瓶进行定向输送至指定位置(水平位置与高度位置),另一方面能够将安瓿瓶倾斜以更充分地进行抽吸瓶身中的药液,实现精准配药、
15.此外,本实用新型中采用单一动力源分别对滑架的升降和转动架的转动进行异步控制,具有结构紧凑、实用性强、可操作性高的优点。
16.下面结合附图对本实用新型作进一步的详细说明。
附图说明
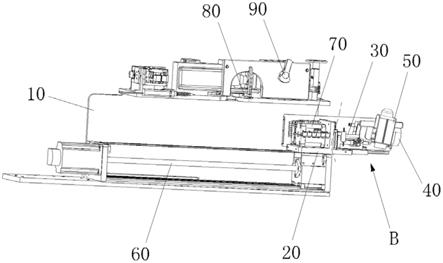
17.图1是本实用新型安瓿瓶夹持输送组件的结构示意图;
18.图2是本实用新型安瓿瓶夹持输送组件的俯视示意图;
19.图3是图2中a-a的剖面结构示意图;
20.图4是图1中b处的放大示意图。
具体实施方式
21.如图1-4所示,一种具有多位置姿态的安瓿瓶夹持输送组件,包括工作台10、滑座20、滑架30、转动架40、安瓿瓶夹爪50、第一驱动器件60和第二驱动器件70。
22.在工作台10上设有水平的第一导轨11,滑座20通过第一导轨11设置于工作台10上,在滑座20上设有竖直的第二导轨21,滑架30通过第二导轨21设置于滑座20上,滑架30上设有转轴31,转动架40通过转轴31设置于滑架30上,安瓿瓶夹爪50设置于转动架40上并且能够打开与闭合。
23.转轴31位于水平面内,转轴31的轴线与第一导轨11之间相互垂直。
24.如图1所示,第一驱动器件60为电动丝杆滑块结构,其驱动滑座20进行水平前后滑移,由安瓿瓶夹爪50所夹持的安瓿瓶沿着第一导轨11进行输送的同时,依次经过瓶颈切割组件80进行安瓿瓶的瓶颈切割和瓶颈折断组件90进行安瓿瓶的瓶颈折断,最终通过注射器完成抽吸注射,实现安瓿瓶的自动配药过程。
25.本实施例中的第二驱动器件70能够异步驱动滑架30的升降和转动架40的倾斜侧翻,第二驱动器件70包括能够沿第一导轨11长度方向向前或者向后的推板71和驱动用的电机72,如图3、图4所示,滑架30上设有第一滚轮32,推板71具有与第一滚轮32配合以驱动滑架30在第二导轨21上进行升降的斜面部73,转动架40上设有第二滚轮41,推板71具有与第二滚轮41配合以驱动转动架40围绕转轴31进行转动的拨动部74。
26.进一步的,滑架30与滑座20之间连接有第一弹簧12,第一弹簧12驱使第一滚轮32压紧在斜面部73,在推板71向前(右)推出时,第一滚轮32沿着斜面部73向上滑动,带动滑架30沿第二导轨21上升,在推板71向后(左)退回时,在第一弹簧12的作用下,第一滚轮32沿着斜面部73向下滑动,带动滑架30沿第二导轨21下降。
27.再进一步的,转动架40与滑架30或者滑座20之间连接有第二弹簧13,第二弹簧13驱使转动架40在第二滚轮41与拨动部74之间配合失效时能够自动回位至初始位置状态,在安瓿瓶的瓶身输送至设定位置时,滑架30下降至最低点,此时推板71继续向后(左)退回,第二滚轮41与拨动部74之间接触相抵,驱使转动架40围绕转轴31转动一定的角度,注射器在该形态下进行抽吸过程,以将瓶身中的药液完全抽取出来,抽吸完成后,推板71向前推出一段距离,第二滚轮41与拨动部74之间抵接配合失效,此时在第二弹簧的作用下,转动架40恢复初始位置。
28.其中,斜面部73与拨动部74位于推板71的同一侧。
29.上述结构采用单动力进行异步驱动滑架30的升降和转动架40的转动,具有结构紧凑、实用性强的优点,便于小型化设计。
30.虽然本实用新型以较佳实施例揭露如上,但并非用以限定本实用新型实施的范围。任何本领域的普通技术人员,在不脱离本实用新型的发明范围内,当可作些许的改进,即凡依照本实用新型所做的同等改进,应为本实用新型的范围所涵盖。
技术特征:
1.一种具有多位置姿态的安瓿瓶夹持输送组件,其特征在于,包括工作台、滑座、滑架、转动架、安瓿瓶夹爪和多个驱动器件,在所述工作台上设有水平的第一导轨,所述滑座通过所述第一导轨设置于所述工作台上,在所述滑座上设有竖直的第二导轨,所述滑架通过所述第二导轨设置于所述滑座上,所述滑架上设有转轴,所述转动架通过所述转轴设置于所述滑架上,所述安瓿瓶夹爪设置于所述转动架上并且能够打开与闭合,多个所述驱动器件分别作用于所述滑座、所述滑架与所述转动架以分别驱动所述滑座进行水平滑移、所述滑架进行竖直升降、所述转动架进行往复回转。2.如权利要求1所述的具有多位置姿态的安瓿瓶夹持输送组件,其特征在于,所述转轴位于水平面内,所述转轴的轴线与所述第一导轨之间相互垂直。3.如权利要求1所述的具有多位置姿态的安瓿瓶夹持输送组件,其特征在于,作用于所述滑座的所述驱动器件为电动丝杆滑块结构。4.如权利要求1所述的具有多位置姿态的安瓿瓶夹持输送组件,其特征在于,采用同一所述驱动器件驱动所述滑架和所述转动架,所述驱动器件为能够沿所述第一导轨长度方向向前或者向后的推板,其中所述滑架上设有第一滚轮,所述推板具有与所述第一滚轮配合以驱动所述滑架在所述第二导轨上进行升降的斜面部,所述转动架上设有第二滚轮,所述推板具有与所述第二滚轮配合以驱动转动架围绕所述转轴进行转动的拨动部。5.如权利要求4所述的具有多位置姿态的安瓿瓶夹持输送组件,其特征在于,所述滑架与所述滑座之间连接有第一弹簧,所述第一弹簧驱使所述第一滚轮压紧在所述斜面部。6.如权利要求4所述的具有多位置姿态的安瓿瓶夹持输送组件,其特征在于,所述转动架与所述滑架或者所述滑座之间连接有第二弹簧,所述第二弹簧驱使所述转动架在所述第二滚轮与所述拨动部之间配合失效时能够自动回位至初始位置状态。7.如权利要求4所述的具有多位置姿态的安瓿瓶夹持输送组件,其特征在于,所述斜面部与所述拨动部位于所述推板的同一侧。
技术总结
本实用新型提供了一种具有多位置姿态的安瓿瓶夹持输送组件,包括工作台、滑座、滑架、转动架、安瓿瓶夹爪和多个驱动器件,在工作台上设有水平的第一导轨,滑座通过第一导轨设置于工作台上,在滑座上设有竖直的第二导轨,滑架通过第二导轨设置于滑座上,滑架上设有转轴,转动架通过转轴设置于滑架上,安瓿瓶夹爪设置于转动架上并且能够打开与闭合,多个驱动器件分别作用于滑座、滑架与转动架以分别驱动滑座进行水平滑移、滑架进行竖直升降、转动架进行往复回转。本实用新型具有结构紧凑、可操作性强的优点。作性强的优点。作性强的优点。
技术研发人员:崔杰 刘显桢 张昌龙 王志达
受保护的技术使用者:深圳市博为医疗机器人有限公司
技术研发日:2020.11.09
技术公布日:2021/12/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1