基于改进UPEMD和DTWSVM的埋地输油管道泄漏检测方法与流程
基于改进upemd和dtwsvm的埋地输油管道泄漏检测方法
技术领域
1.本发明涉及管道泄漏检测和声波信号处理技术领域,尤其涉及基于 改进upemd和dtwsvm的埋地输油管道泄漏检测方法。
背景技术:
2.管道作为一种兼顾便捷性、经济性的运输方式,在各个领域得到了 众多的应用。由于埋地管道所处的环境较为复杂,且管道在地下容易受 雨水等腐蚀,管道很容易出现泄漏。输油管道出现泄漏,不仅造成资源 的浪费,还会对土壤、植被产生巨大影响,因此对埋地管道进行泄漏检 测具有重要的意义。
3.声波法具有误报率低、漏报率低、传播距离远、良好的灵敏度等诸 多优点,所以采用声波法对管道进行泄漏检测得到了广泛的应用。由于 声波在传播的过程中,易受噪声的影响,所以对声波信号进行去噪处理 十分重要。upemd(uniform phase empirical mode decomposition,均匀相 位经验模态分解)是在emd(empirical mode decomposition,经验模态分 解)的基础上进行优化和改进的一种信号处理方法,它采用相位均匀分 布的正弦信号作为辅助信号,并且通过增加正弦波的相位数以达到更好 的抑制模态混叠现象。但是upemd将信号分解为若干个imf(intrinsicmodal function,本征模态函数)后,没有给出一个合适的筛选方法。在 重构信号时,若选择重构的imf包含的有用信息少,则会导致误差增 大,信号的分析效果达不到预期。
技术实现要素:
4.鉴于现有技术的上述缺点、不足,本发明提供一种基于改进 upemd和dtwsvm的埋地输油管道泄漏检测方法,其解决了现有埋地 输油管道泄漏检测技术所存在的误差大、信号分析效果差的技术问题。 本发明能够提高对管道的泄漏检测能力,并准确判断管道的工况。
5.为了达到上述目的,本发明采用的主要技术方案包括:
6.本发明实施例提供基于改进upemd和dtwsvm的埋地输油管道泄 漏检测方法。该方法包括以下步骤:
7.步骤1,采用声压传感器获取输油管道在正常工况和泄漏时的声波 信号数据;
8.步骤2,采用upemd算法对步骤1采集的声波信号数据进行分解, 直到残余不能在分解,得到若干个imf;
9.步骤3,计算步骤2中所得到的各imf与管道泄漏时和正常工作时 的声波信号的互信息值,根据得到的互信息值计算各个imf的相似系 数,通过相似系数选取包含泄漏信息多的imf进行信号重构;
10.步骤4,根据深度学习dl和孪生双子支持向量机twsvm,建立网 络模型dtwsvm;
11.步骤5,根据步骤3得到的重构信号,建立dtwsvm模型的训练样 本和测试样本;将训练样本输入到dtwsvm模型中,通过监督学习和 无监督学习调整dtwsvm模型中的参数,得
到训练好的dtwsvm模 型;然后将测试样本输入到训练好的dtwsvm模型中,对埋地输油管道 的工况进行判断。
12.进一步地,所述步骤2中采用upemd算法对声波信号分解的具体 步骤如下:
13.步骤2.1、计算upemd算法的循环周期tc和循环次数nc;
14.nc=log2(n)
ꢀꢀꢀ
(1)
15.tc=2m,m=1:ncꢀꢀꢀ
(2)
16.式中n表示信号数据的总长度,掩膜频率的数值等于循环周期的倒 数,即fc=1/tc,m为循环次数的倒数。
17.步骤2.2、对相位的个数n
p
和幅值ε进行设置,其中,n
p
∈n,n
p
>1,且 n
p
的个数必须为2的整数次方,当n
p
的取值为2时,upemd就是掩膜emd;
18.步骤2.3、令原始信号x(t)=r0(t),同时,构造掩蔽信号,即:
19.w(t;εm;fc;θk)=εm·
cos(2π
·
fc·
t+θk)
ꢀꢀꢀ
(3)
20.其中,εm=ε
×rm-1
(t),r
m-1
(t)是标准偏差,相位θk在[0,2π]范围内被均匀 的分成n
p
份,故
[0021]
θk=2π(k-1)/n
p
,k=1:n
p
ꢀꢀꢀ
(4)
[0022]
步骤2.4、扰乱信号yk(t)的表达式为:
[0023]
yk(t)=x(t)+εm·
cos(2π
·
fc·
t+θk)
ꢀꢀꢀ
(5)
[0024]
步骤2.5、用emd对扰乱信号yk(t)进行分解,将分解得到的第i个imf 分量定义为ei(
·
);因此,emd分解得到的第一个分量为:
[0025]cm,k
(t)=e1(x(t)+w(t;εm;fc;θk)),k=1,2...n
p
,m=1:ncꢀꢀꢀ
(6)
[0026]
步骤2.6、从得到的c
m,k
(t)中减去掩蔽信号w(t;εm;fc;θk)后,再进行集成 平均就可以得到imf1,即:
[0027][0028]
步骤2.7、将步骤2.6中计算得到的余项作为新的待分解的扰乱信号, 循环步骤2.1-步骤2.6,直到分解出所有的imf后,停止循环。
[0029]
进一步地,所述步骤3的具体方法为:
[0030]
计算各个imf与管道泄漏时和正常工作时的声波信号的互信息值:
[0031][0032]
式中x和y是两个随机信号,p(x,y)表示x和y的联合分布,且x和y的 边缘概率密度函数分别为p(x)和p(y);
[0033]
将imf与泄漏信号的互信息定义为li,将imf与正常工况时信号的 互信息定义为hi,根据得到的互信息值计算相似系数βi,βi=l
i-hi; i=1,2
…
,k;
[0034]
根据相似系数选择包含泄漏信息多的imf重构信号,相似系数越大 的imf包含的泄漏信息越多。
[0035]
进一步地,所述步骤4的具体方法为:
[0036]
在深度学习和twsvm的基础上,通过分析各种网络结构和网络层 数对检测精度的影响,建立一种新的网络模型dtwsvm,通过对模型训 练确定模型中各个参数的最优值;
[0037]
所述dtwsvm模型是一个包含输入层、隐含层和输出层的三层网络 模型,隐含层中设置三个twsvm来提取输入数据的特征,输出层设置 一个主twsvm来对管道的工况进行判别;
[0038]
所述隐含层中的twsvm分为两类,输入数据为线性数据时, twsvm为线性,生成三对超平面,将原始数据映射到6维空间中,记录 原始数据的6维位置信息;输入的是非线性数据时,twsvm为非线性, 引入核函数数据将原始数据映射到6维空间;
[0039]
原始数据t=[(x1,y1),
…
,(x
m+k
,y
m+k
)]输入到模型的输入层,隐含层中三个 twsvm进行数据的特征提取,生成一个特征数据集:
[0040]
x=f(x)=(f(x)
1,+
,f(x)
1,-,f(x)
2,+
,f(x)
2,-,f(x)
3,+
,f(x)
3,-)
t
ꢀꢀꢀ
(27)
[0041]
f(x)
i,j
=(w
i,j
·
x)+b
i,j
,i=1,2,3,j=+,
‑ꢀꢀꢀ
(28)
[0042]
式中,b
i,j
和w
i,j
均为dtwsvm模型中的参数,训练后得到具体数值;
[0043]
非线性情况下,隐含层中的twsvm通过核函数进行映射:
[0044]
f(x)
i,j
=k(x
t
,c
t
)z
i,j
+b
i,j
,i=1,2,3,j=+,
‑ꢀꢀꢀ
(29)
[0045]
式中,k(x
t
,c
t
)表示核函数,z
i,j
是dtwsvm模型中的参数;
[0046]
所述twsvm中的参数是通过交叉验证和网格搜索的方法来确定参 数的最优值;
[0047]
所述输出层的主twsvm分为两类,线性twsvm和非线性 twsvm;类别与隐含层中的tesvm保持一致,主twsvm是用来对管 道的工况进行判断;
[0048]
主twsvm在线性和非线性状态下的判别公式分别为:
[0049][0050][0051]
式中,k(x
t
,c
t
)表示核函数。
[0052]
进一步地,所述步骤5中,模型的训练通过自下而上的非监督学习 和自上而下的监督学习来调整网络模型中的各项参数;其中,非监督学 习是逐个对模型的每一层进行训练,调整各层的每项参数,训练时,前 一层的输出作为后一层的输入,直到所有的层训练完成;监督学习是在 非监督学习的基础上,对模型各个层的参数进行调整,使得各层参数到 达最优值,进而将误差最小化。
[0053]
本发明的有益效果是:本发明的基于改进upemd和dtwsvm的埋 地输油管道泄漏检测方法,采用基于互信息优化的upemd算法对采集 的声波信号进行去噪处理,upemd将信号分解为若干个imf,根据互 信息得到各imf的相似系数,根据相似系数选择包含泄漏信息多的imf 进行信号重构,重构后的信号能够准确反映管道的泄漏信息,且含噪声 极少。
[0054]
本发明根据dl(deep learning,深度学习)和twsvm(twin supportvector machine,孪生双子支持向量机),建立了一种dtwsvm(deeptwin support vector machine,深度孪生双子支持向量机)模型,dtwsvm 模型结合了深度学习和twsvm的优点,能够准确判断管道的工况。
附图说明
[0055]
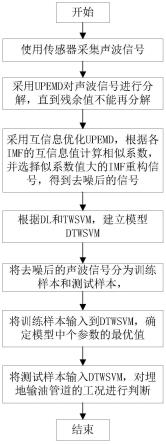
图1为本发明基于改进upemd和dtwsvm的埋地输油管道泄漏检 测方法的流程图;
[0056]
图2为本发明所提供的改进upemd对信号进行去噪的流程图;
[0057]
图3为本发明提供的dtwsvm模型的结构图;
[0058]
图4为本发明所提供的检测原理图;
[0059]
图5为本发明所提供的现场图;
[0060]
图6为本发明所提供的传感器1在管道首站采集的原始信号(即去 噪前的管道泄漏声波信号)图;
[0061]
图7为本发明所提供的分解得到的部分imf及其对应的频谱图;
[0062]
图8为本发明所提供的各imf的相似系数数值示意图;
[0063]
图9为本发明的重构后的信号与采用emd、upemd去噪后的信号 进行对比的泄漏声波信号曲线图;其中,图9(a)为采用emd去噪后的 泄漏声波信号曲线图;图9(b)为采用upemd去噪后的泄漏声波信号 曲线图;图9(c)为采用本发明方法去噪后的泄漏声波信号曲线图。
具体实施方式
[0064]
为了更好的解释本发明,以便于理解,下面结合附图,通过具体实 施方式,对本发明作详细描述。
[0065]
如图1所示,本实施例提供了一种基于改进upemd和dtwsvm的 埋地输油管道泄漏检测方法,包括以下步骤:
[0066]
步骤1,使用声压传感器对输油管道在正常工作时和泄漏时的声波 信号进行采集。
[0067]
步骤2,采用upemd算法对采集的声波信号进行分解,直到残余不 能再分解时停止分解。
[0068]
emd是一种常用的信号处理方法,但是其存在模态混叠现象会导致 重构后的信号掺有较多噪声和其它间断信号,导致出现误差。upemd是 在emd的基础上进行优化和改进的一种信号处理方法,它采用相位均匀 分布的正弦信号作为辅助信号,并且通过增加正弦波的相位数以达到更 好的抑制模态混叠现象。upemd的具体步骤如下:
[0069]
(1)首先,计算upemd算法的循环周期tc和循环次数nc。
[0070]
nc=log2(n)
ꢀꢀꢀ
(1)
[0071]
tc=2m,m=1:ncꢀꢀꢀ
(2)
[0072]
式中n表示信号数据的总长度,掩膜频率的数值等于循环周期的倒数, 即fc=1/tc,m为循环次数的倒数。
[0073]
(2)对相位的个数n
p
和幅值ε进行设置。其中,n
p
∈n,n
p
>1,且n
p
的个 数必须为2的整数次方,当n
p
的取值为2时,upemd就是掩膜emd。
[0074]
(3)令原始信号x(t)=r0(t),同时,构造掩蔽信号,即
[0075]
w(t;εm;fc;θk)=εm·
cos(2π
·
fc·
t+θk)
ꢀꢀꢀ
(3)
[0076]
其中,εm=ε
×rm-1
(t),r
m-1
(t)是标准偏差,相位θk在[0,2π]范围内被均匀 的分成n
p
份,故
[0077]
θk=2π(k-1)/n
p
,k=1:n
p
ꢀꢀꢀ
(4)
[0078]
(4)由以上可以得到扰乱信号yk(t)的表达式:
[0079]
yk(t)=x(t)+εm·
cos(2π
·
fc·
t+θk)
ꢀꢀꢀ
(5)
[0080]
(5)采用emd对扰乱信号进行分解,将分解得到的第i个imf分量 定义为ei(
·
)。因此,emd分解得到的第一个分量为:
[0081]cm,k
(t)=e1(x(t)+w(t;εm;fc;θk)),k=1,2...n
p
,m=1:ncꢀꢀꢀ
(6)
[0082]
此时,从式(5)得到的c
m,k
(t)中减去w(t;εm;fc;θk)后,再对其进行集成 平均就可以得到imf1,即
[0083][0084]
(6)将计算得到的余项作为新的待分解的扰乱信号,循环步骤 (1)-(5),直到分解出所有的imf后停止循环。
[0085]
步骤3,采用互信息优化upemd算法,根据各imf的互信息值计 算相似系数,并根据相似系数来选择合适的imf进行信号重构,改进 upemd算法的流程图如图2所示。
[0086]
互信息可以度量两个变量或者系统之间的相关程度。互信息值越大, 则表明两个变量或系统之间的依赖程度越大,且两者之间互相包含的共 同信息也越多。定义x和y是两个随机信号,它们的联合分布用p(x,y)来 表示,且x和y的边缘概率密度函数分别为p(x)和p(y)。互信息可由下式求 得:
[0087][0088]
对管道首末站传感器采集的信号进行去噪时,首先采用upemd算 法对信号进行分解,得到的每个imf中含有的泄漏信息多少不同。 upemd算法仅仅是对信号进行分解,没有给出imf的筛选方法。一般 情况下,是将所有imf重构或者通过频域分析选择位于某特定频段内的 imf进行重构。但是这种选择方法得到的信号中,仍然含有一定的噪 声,不能有效减小误差。所以,在重构信号时,需要确定一个能够筛选 出包含泄漏信息多的imf的方法,减小噪声引起的误差。互信息可以反 映两个变量之间相关程度。因此,本发明采用互信息对upemd算法进 行优化,具体步骤如下:
[0089]
1)将首末站传感器采集的信号采用upemd算法进行分解,得到k 个imf;
[0090]
2)计算每个imf与正常工况信号之间的互信息值,并将其定义为 hi。imf中包含泄漏信息越多时hi的数值就越小,相反则越大;
[0091]
3)计算每个imf与泄漏信号之间的互信息值,并将其定义为li。 imf包含的泄漏信息越多时,li的数值就越大,相反则越小;
[0092]
4)定义相似系数βi=l
i-hi,i=1,2
…
,k。然后,根据步骤2)和3)得 到的互信息值来计算各个imf对应的相似系数。imf包含泄漏信息越 多,li越大,hi越小,相似系数也就越大。
[0093]
5)根据步骤4)得到的相似系数对imf进行筛选。相似系数βi的数 值越大,表明imf包含的泄漏信息越多。因此,选取相似系数大的imf 进行重构,得到含噪声更少的信号。
[0094]
步骤4,根据深度学习dl和孪生双子支持向量机twsvm,建立 dtwsvm模型,模型结构如图3所示。
[0095]
孪生双子支持向量机twsvm借鉴了支持向量机svm的分类思想, 通过建立两个超平面对样本进行分类。在svm中,正负样本是采用同一 个超平面进行分类,而twsvm分别为
正负样本各建立了一个超平面来 进行分类。一个超平面对应一个二次规划问题,所以twsvm需要求解 两个二次规划问题,这就使得其在准确率上得到了极大的提升。此外, svm是一次性求解一个二次规划问题,而twsvm是将一个问题分成两 个小的二次规划问题,提高了模型的训练速度和检测能力。
[0096]
twsvm是通过生成两个超平面来实现对数据的分类,定义数据集 为:
[0097]
t=[(x1,y1),
…
,(x
m+k
,y
m+k
)]
ꢀꢀꢀ
(9)
[0098]
式中,x
l
∈rn,l=1,2,
…
,m+k,ys=+1,s=1,2,
…
,m,yq=-1,q=m+1,m+2,
…
,m+k,定义 a=(x1,x2,
…
,xm)
t
,b=(x
m+1
,x
m+2
,
…
,x
m+k
)
t
。
[0099]
由以上分析可得,对于twsvm要求解的两个二次规划问题。可以 根据式(10)-(11)得到一对超平面(w
+
·
x)+b
+
=0和(w-·
x)+b-=0。
[0100][0101][0102]
式中,c1和c2是控制ξ大小的惩罚参数,e
+
和e-是两个组成元素均为1 的列向量,ξ
+
和ξ-是控制对噪点容忍程度的松弛变量,e
+
,ξ
+
∈rm,e-,ξ-∈rk。 由以上两式可得,一个目标函数的约束由另一个目标函数的模式确定, 两个超平面互相限制。线性状态下,twsvm的拉格朗日对偶问题为:
[0103][0104][0105]
其中,h=[a e
+
],g=[b e-]。
[0106]
综合以上,可以得到线性条件下,为了线性规划问题能有最优解, 由kkt条件可得:
[0107][0108][0109]
此时,当有待判定新样本输入时,线性twsvm可以根据下式判断 样本所属标签。
[0110][0111]
式中,|
·
|表示进行绝对值运算。
[0112]
当数据在低维空间线性不可分时,svm利用核函数将其映射到高维 空间,再对数据进行分类。和svm的处理方法相同,twsvm也是采用 核函数对数据进行映射,再利用在线性条件下的方法对数据进行分类。 引入核函数后,twsvm的两个超平面可以表示为:
[0113][0114]
非线性twsvm的两个二次规划问题如下所示:
[0115][0116][0117]
非线性情况下,定义:
[0118][0119]
此时,twsvm对应的朗格朗日对偶问题为:
[0120][0121][0122]
通过上述分析,为了非线性规划问题能有最优解,由kkt条件可得
[0123][0124][0125]
此时,当有待判定新样本输入时,twsvm可以根据下式判断样本 所属标签。
[0126][0127]
式中,|
·
|是样本点到超平面的垂直距离。
[0128]
twsvm和svm(support vector machine,支持向量机)相比,其训 练速度更快、分类精度更高,且具有良好的泛化能力。深度学习dl不 需要人为去提取特征,而是自动对数据进行筛选、提取特征。此外,与 传统神经网络相比,深度学习具有更好的学习能力、适应性和可移植 性。在深度学习和twsvm的基础上,本发明结合两者的优点,组建了 一种新的网络模型dtwsvm。
[0129]
步骤5,采用训练样本对dtwsvm进行训练,确定各项参数最优 值,再使用测试样本得到分类结果,确定埋地输油管道的工况。
[0130]
dtwsvm是一个包含输入层、隐含层和输出层的网络模型。输入 层输入管道两端传感器测得的数据。在模型的隐含层中,设置了三个 twsvm,这三个twsvm之间的唯一的区别是参数的不同,它们主要 是用来进行特征提取。三个twsvm生成6个超平面,可以把原始数据 映射到6维空间中。输出层中设置一个twsvm,用于进行分类。本模 型不仅充分发挥了dl和twsvm的优点,还克服了浅层模型的不足, 具有良好的准确性。dtwsvm的模型如图3所示。
[0131]ci1
,c
i2
,i=1,2,3分别为隐含层中三个twsvm的参数,本发明采用交叉验 证和网格搜索的方法来确定其最优值。管道泄漏时,传感器采集的数据 基本上为非线性数据,而rbf核函数(radial basis function,径向基函数) 具有良好的非线性映射能力、泛化能力,所以,在非线性情况下,本发 明采用rbf核函数k(xi,xj)=exp(-λ||x
i-xj||2)。
[0132]
在线性情况下,根据式(10)-(11)可得,隐含层中的每一个twsvm 都会生成一对超平面。
[0133][0134]
隐含层中twsvm生成的6个超平面可以将传感器采集的原始数据 x投射到6维空间中,得到原始数据的6维位置信息,生成一个新的数据 集x。
[0135]
x=f(x)=(f(x)
1,+
,f(x)
1,-,f(x)
2,+
,f(x)
2,-,f(x)
3,+
,f(x)
3,-)
t
ꢀꢀꢀ
(27)
[0136]
f(x)
i,j
=(w
i,j
·
x)+b
i,j
,i=1,2,3,j=+,
‑ꢀꢀꢀ
(28)
[0137]
式中,b
i,j
和w
i,j
均为dtwsvm模型中的参数,训练后得到具体数值。
[0138]
非线性情况下,隐含层中的每个twsvm通过式(18)-(19)生成两 个曲面,将传感器采集得到的原始数据x投射到生成的6维空间中,生成一 个新的数据集x。
[0139]
f(x)
i,j
=k(x
t
,c
t
)z
i,j
+b
i,j
,i=1,2,3,j=+,
‑ꢀꢀꢀ
(29)
[0140]
式中,k(x
t
,c
t
)表示核函数,z
i,j
是dtwsvm模型中的参数。
[0141]
根据以上分析可得,数据集x是隐含层中三个twsvm从原始数据x 中提取的数据特征,x将作为输出层的输入,用来判断管道的工况。
[0142]
模型的训练可以分为两部分:自下而上的非监督学习和自上而下的 监督学习。非监督学习是逐个对模型的每一层进行训练,调整各层的每 项参数。训练时,前一层的输出作为后一层的输入,直到所有的层训练 完成。监督学习是在非监督学习的基础上,对模型各个层的参数进行调 整,使得各层参数到达最优值,进而将误差最小化。dtwsvm的基本步 骤如下:
[0143]
《1》在线性情况下,将隐含层中三个twsvm的参数c
i1
,c
i2
,i=1,2,3代入到 式(12)-(13)中进行运算,再通过式(14)-(15)就可以得到参数w
i,+
,b
i,+
,w
i,-,b
i,-。 在非线性情况下,将参数c
i1
,c
i2
代入式(21)-(22)中,并通过式(23)-(24) 得到参数z
i,+
,b
i,+
,z
i,-,b
i,-。
[0144]
《2》线性情况下,根据步骤《1》得到的各项参数和式(28),将传感器采 集到的原始数据x
l
转换成f(x
l
)。非线性情况下,采用式(29)对原始数据进 行转换。将转换得到的数据样本(f(x
l
),y
l
)作为输出层主twsvm的输入。
[0145]
《3》在线性情况下,通过交叉验证和网格搜索方法得到主twsvm的 参数c1,c2的最优值。根据式(12)-(15),可以得到参数w
+
,b
+
,w-,b-的数 值。非线性情况下,根据式(20)-(23),得到参数z
+
,b
+
,z-,b-的数值。
[0146]
《4》线性情况下,将步骤《3》中得到的w
+
,b
+
,w-,b-代入式(16),对管 道工况进行判断。非线性情况下将z
+
,b
+
,z-,b-代入式(25),对管道工况 进行判断。
[0147]
实施例
[0148]
本发明采用某航油管道公司的航油管道进行了泄漏实验。航油管道 长度10km,管
径为200mm,管道内为3号航空煤油,管道首末端的压力 分别为2.3kpa和0.53kpa。在管道的1km、4km和7km处各有一个口径 为8mm和5mm的球阀,用于模拟泄漏的产生。管道首末端各安装一个 pcb106b型声压传感器,用来采集泄漏信号,其量程为0-57kpa,灵敏度 为43.5mv/kpa,工作的温度范围为-54-+121℃,采样频率设为1000hz。 数据采集装置采用的是ni-daq9181数据采集器,其与labview软件 配合使用,对数据进行采集。其原理图和现场图如图4和图5所示。
[0149]
在所有阀门关闭时,采集管道内的声波信号,即正常工况下的声波 信号。在管道的1km、3km和7km处分别打开不同的泄漏阀门模拟泄 漏,即泄漏时的声波信号。
[0150]
以传感器1采集到的信号为例,进行去噪实验。打开管道3km处的 8mm阀门,模拟管道出现泄漏,传感器1在管道首站采集的原始信号如 图6所示。
[0151]
从图6中可以看出,原始信号含有较多的噪声,信号波动较大,无 法判断管道是否泄漏。现采用基于互信息优化的upemd算法对原始信 号进行去噪处理。首先,采用upemd算法对原始信号进行分解,将原 始信号分解为12个不同尺度的imf和一个残余项。图7为分解得到的部 分imf及其频谱图。
[0152]
相似系数可以反映每个imf包含泄漏信息的多少,所以可以根据相 似系数来选择包含泄漏信息多的imf。首先,计算每个imf与正常信号 互信息值。再计算与泄漏信号的互信息。最后,计算相似系数的数值。 根据相似系数的定义可得,相似系数的数值越大,则表明imf中含有的 泄漏信息越多。经过计算,得到的各个imf的相似系数值如图8所示。
[0153]
从图8可以看出imf7-imf12的相似系数明显大于imf1-imf6的相 似系数。因此,选择imf7-imf12进行信号重构。将重构后的信号与采用 emd、upemd去噪后的信号进行对比,对比结果如图9所示。
[0154]
从图9(a)、图9(b)、图9(c)中可以明显看出,采用本发明的 方法得到的曲线更加平滑,含噪声更少,可以明显的看出信号的变化趋 势以及拐点。
[0155]
在管道1km、3km和7km处分别打开8mm和5mm阀门模拟泄漏, 各采集1500组泄漏声波信号。在管道正常工况下,同样采集1500组数 据。采用基于互信息优化的upemd算法对信号进行去噪。
[0156]
线性情况下,隐含层中三个twsvm的参数取值为:c
11
=0.3,c
12
=0.1, c
21
=c
22
=0.2,c
31
=0.3,c
32
=0.25。输出层twsvm的参数c1=c2=1。非线性情况 下,c
11
=0.1,c
12
=0.3,c
21
=c
31
=0.35,c
22
=c
32
=0.1。输出层twsvm的参数 c1=1,c2=10。隐含层中三个twsvm均采用rbf核函数,且参数λ的取值 分别为1、0.1、0.1。
[0157]
将前800组去噪后的数据用于dtwsvm模型的训练,通过监督学习 和无监督学习来调整模型中的各个参数,直至误差最小化。训练完成 后,将剩余700组去噪后的数据作为测试样本输入到训练好的dtwsvm 中进行管道工况识别,将dtwsvm的识别精度和twsvm、dsvm的识 别精度进行对比,对比结果如表1所示。
[0158]
表1识别精度对比结果
[0159][0160]
根据表1可得,不论是不同位置的泄漏,还是同一位置不同大小的 泄漏,dtwsvm对管道泄漏的识别准确性明显要高于twsvm和dsvm 的准确性,最高可达99.6%。
[0161]
本发明采用互信息对upemd方法进行了优化,得到了基于互信息 优化的upemd滤波方法,此方法可以有效去除信号中的噪声,极大的 保留了泄漏信息。此外,本发明将深度学习与twsvm相结合,得到了 一种新的网络模型dtwsvm。经实验验证,将去噪后的信号输入到 dtwsvm中,可以准确判断管道工况,识别准确率高,为智慧管网的建 设和管理提供了便捷。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1