一种试管自动脱帽机及其控制方法与流程
1.本发明涉及试管自动脱帽机技术领域,具体为一种试管自动脱帽机及其控制方法。
背景技术:
2.试管通常用试管帽进行密封,当要对试管进行取样时,需要将试管帽取下,但是手工取下试管帽不仅费时费力效率低,而且容易对试管内的样品造成污染。而由于不同型号的试管,试管及试管帽的往往尺寸有所差别,并且样品试管由一定的合格率,因此需要设计一款能对试管进行识别检测的试管自动脱帽机及其控制方法,自动对试管进行识别检测,自动对试管进行脱帽。
技术实现要素:
3.(一)解决的技术问题针对现有技术的不足,本发明提供了一种试管自动脱帽机及其控制方法,能对不同型号的试管自动进行识别检测,并自动对试管进行脱帽,能有效提高生产效率,降低试管内样品被污染的风险。
4.(二)技术方案为实现上述目的,本发明提供如下技术方案:一种试管自动脱帽机,包括转盘机构、上料工位、识别工位、脱帽工位及下料工位,转盘机构设置有固定组件,识别工位设置有相机,脱帽工位设置有夹持组件及脱帽机构,夹持组件用于在对试管进行脱帽时对试管进行固定,脱帽机构用于使试管帽脱离试管;其中,固定组件用于对试管进行固定,转盘机构通过转动的方式使试管在上料工位、识别工位、脱帽工位、下料工位之间依次流转。
5.作为本发明的一种优选方案,转盘机构设置有第一电机、安装板,安装板为“十”字形,固定组件的数量为四个,固定组件安装于安装板,第一电机通过连接轴带动安装板转动,脱帽工位下方设置有回收漏斗。
6.作为本发明的一种优选方案,固定组件包括定位块、锁紧环、弹片,定位块设置有定位槽,弹片的数量为三个或三个以上,弹片呈圆周均匀分布于定位块周围,锁紧环用于将弹片紧锁于定位块,弹片设置有导向斜面。
7.作为本发明的一种优选方案,夹持组件包括第二电机,第二电机的输出轴连接有第一丝杆,第一丝杆适配有第一螺母块,第一螺母块连接有第一推拉杆,第一推拉杆连接有抱紧组件,抱紧组件包括安装块,安装块安装有第一抱紧块及第二抱紧块,第一抱紧块与第二抱紧块的端部均安装有夹块,第一抱紧块与第二抱紧块均能在安装块处转动,第一抱紧块与第二抱紧块对称布置于第一推拉杆的两侧,第一推拉杆与第一抱紧块背离夹块的端部相连,第一推拉杆与第二抱紧块背离夹块的端部相连。
8.作为本发明的一种优选方案,脱帽机构包括升降组件、夹紧组件及转动组件,升降
组件带动夹紧组件及转动组件上升或下降,夹紧组件用于对试管帽进行夹紧,转动组件用于带动夹紧组件转动。
9.作为本发明的一种优选方案,夹紧组件包括第三电机,第三电机的输出轴连接有第二丝杆,第二丝杆适配有第二螺母块,第二螺母块连接有第二推拉杆,第二推拉杆连接有夹爪组件,夹爪组件包括第一连杆及第二连杆,第一连杆与第二连杆对称布置于第二推拉杆的两侧,第一连杆与第二连杆的端部均连接有夹爪块,夹爪块设置有卡帽槽,第二推拉杆推出时,第一连杆与第二连杆均转动,带动两夹爪块相互远离,带动第二推拉杆拉回时,第一连杆与第二连杆均转动,带动两夹爪块相互靠近。
10.作为本发明的一种优选方案,夹紧组件还设置有防黏件,防黏件设置有折板,折板与卡帽槽相对应。
11.作为本发明的一种优选方案,转动组件包括第四电机,第四电机的输出轴连接有传动机构,传动机构包括主动同步轮、从动同步轮,主动同步轮与从动同步轮通过同步带相连,从动同步轮与夹紧组件相连。
12.作为本发明的一种优选方案,升降组件包括第五电机,第五电机的输出轴安装有齿轮,齿轮适配有齿条,齿条与脱帽机相对固定,当第五电机转动时,第五电机在齿轮的驱动下相对于齿条上升或下降,夹紧组件及转动组件与第五电机同步上升或下降。
13.另一方面,一种试管自动脱帽机的控制方法,用于对试管自动脱帽机进行控制,通过主控制器向夹具控制器发送控制信号,夹具控制器的控制算法包括pid控制算法控制,以电流环系统做内环,速度环系统做外环,其步骤包括:s1、试管上料至上料工位,固定组件对试管进行卡紧;s2、主控制器控制第一电机转动,转盘机构将试管带动至识别工位;s3、相机对试管进行拍照,主控制器根据试管的图像信息判断试管中的血样是否合格、试管标签是否清晰及试管型号;s4、主控制器控制第一电机转动,转盘机构将试管带动至脱帽工位;s5、夹具控制器通过速度环系统控制第二电机转动带动第一丝杆转动,带动抱紧组件动作;s6、当抱紧组件碰到试管时,夹具控制器的电流环系统立即相应,以恒定的力矩电流进行恒流控制,第二电机停止,并以恒定的力矩抱紧试管;s7、主控制器控制第五电机转动,升降组件带动夹紧组件及转动组件一同下降;s8、夹具控制器通过速度环系统控制第三电机转动,夹爪组件动作;s9、当夹爪组件碰到试管帽时,夹具控制器的电流环系统立即相应,以恒定的力矩电流进行恒流控制,第三电机停止,并以恒定的力矩抱紧试管帽;s10、主控制器控制第四电机转动,转动组件带动夹紧组件转动,进而将试管帽从试管头部取出;s11、夹具控制器控制第二电机转动带动第一丝杆转动,抱紧组件解除对试管的抱紧;s12、夹具控制器控制第一电机转动,转盘机构将脱完试管帽的试管带动至下料工位,第三电机转动,夹爪组件松开试管帽,将试管帽丢落至回收漏斗。
14.作为本发明的一种优选方案,主控制器通过h桥拓扑结构向夹具控制器发送控制
信号,夹具控制器进行控制时,通过arm芯片向信号放大器发送pwm驱动信号,进而通过功率放大器控制电机运行,并通过对电机的电流进行监测后将监测到的数据反馈至arm芯片,对电机进行伺服控制。
15.作为本发明的一种优选方案,夹具控制器设置有恒流控制系统,恒流控制系统设置有大功率绝缘栅极晶体管。
16.(三)有益效果与现有技术相比,本发明提供了一种试管自动脱帽机及其控制方法,具备以下有益效果。
17.1、此种试管自动脱帽机包括转盘机构,转盘机构有上料工位、识别工位、脱帽工位及下料工位,可以实现试管装载、视觉识别、脱帽、卸载多工序同时进行。识别工位设置有相机,可以配合机械手分拣不合格样本。脱帽工位设置有夹持组件及脱帽机构,在进行脱帽时,夹持组件对试管进行夹持,脱帽机构对试管进行脱帽,能降低试管内样品被污染的风险。
18.2、此种试管自动脱帽机中转盘机构、夹持组件、升降组件、夹爪组件及转动组件均采用电机作为动力源,运动过程平稳、可靠、噪音小。
19.3、此种试管自动脱帽机中夹持组件和夹爪组件在夹紧过程中,配合夹紧力控制程序,实现了兼容不同种类试管及试管帽的夹紧。
20.4、此种试管自动脱帽机中转动组件通过电机控制,可实现旋转方式无限制,在同一方向无限旋转时,有效解决了控制线缠绕问题。
21.5、此种试管自动脱帽机中升降组件通过带动夹紧组件及转动组件上升或下降,可以适应不同高度的试管。
22.6、此种试管自动脱帽机中夹爪组件设计了防脱帽黏连机构,有效解决了脱帽后帽与夹爪黏连的问题。
23.7、此种试管自动脱帽机的控制方法中,夹具控制器的控制算法包括pid控制算法控制,以电流环系统做内环,速度环系统做外环。控制稳定、可靠,夹紧力稳定可调。
附图说明
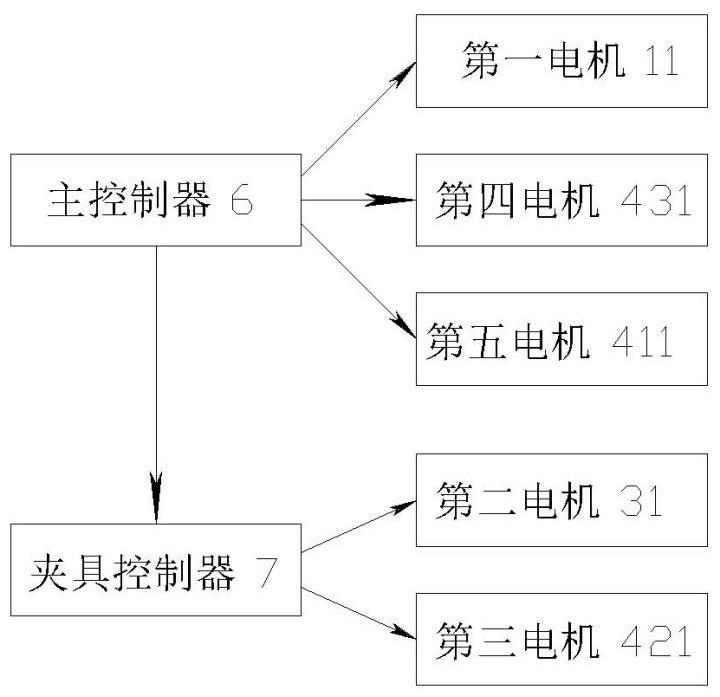
24.图1为本发明中自动脱帽机的立体结构示意图之一;图2为本发明中自动脱帽机的立体结构示意图之二;图3为本发明中转盘机构的立体结构示意图;图4为本发明中固定组件的立体结构示意图;图5为本发明中夹持组件的立体结构示意图;图6为本发明中脱帽机构的立体结构示意图;图7为本发明中夹紧组件的立体结构示意图;图8为本发明中夹爪组件的立体结构示意图;图9为本发明中主控制器与夹具控制器的控制关系示意图;图10为本发明中自动脱帽机的控制方法的流程图。
25.图中:a、上料工位;b、识别工位;c、脱帽工位;d、下料工位;1、转盘机构;11、第一电机;12、安装板;13、固定组件;14、连接轴;131、定位块;132、定位槽;133、锁紧环;134、弹片;
135、导向斜面;2、相机、3、夹持组件;31、第二电机;32、第一丝杆;33、第一螺母块;34、第一推拉杆;35、抱紧组件;351、安装块;352、第一抱紧块;353、第二抱紧块;354、夹块;4、脱帽机构;41、升降组件;411、第五电机;412、齿轮;413、齿条;42、夹紧组件;421、第三电机;422、第二丝杆;423、第二螺母块;424、第二推拉杆;425、防黏件;426、折板;427、夹爪组件;4271、第一连杆;4272、第二连杆;4273、夹爪块;4274、卡帽槽;43、转动组件;431、第四电机;432、传动机构;433、主动同步轮;434、从动同步轮;435、同步带;5、回收漏斗;6、主控制器;7、夹具控制器。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.正如背景技术所介绍的,现有技术中存在的不足,为了解决如上的技术问题,本技术提出了一种试管自动脱帽机及其控制方法。
28.本技术的一种典型的实施方式中,如图1-10所示,一种试管自动脱帽机,包括转盘机构1、上料工位a、识别工位b、脱帽工位c及下料工位d,转盘机构1设置有固定组件13,识别工位b设置有相机2,脱帽工位c设置有夹持组件3及脱帽机构4,夹持组件3用于在对试管进行脱帽时对试管进行固定,脱帽机构4用于使试管帽脱离试管;其中,固定组件13用于对试管进行固定,转盘机构1通过转动的方式使试管在上料工位a、识别工位b、脱帽工位c、下料工位d之间依次流转。
29.可以理解的,在对试管进行脱帽时,从上料工位a进行试管上料,将试管置入上料工位a处的固定组件13。转盘机构1转动,通过转盘机构1将上料工位a处的试管输送至识别工位b,识别工位b处的相机2对试管进行拍照识别,配合机械手分拣不合格样本或识别试管是否带有试管帽并对试管帽进行位置识别。上料工位a的试管被输送到识别工位b的同时,下料工位d的空固定组件13被输送至上料工位a,此时继续在上料工位a进行上料。识别工位b对试管进行识别后,输送组件继续转动,将识别工位b的试管输送至脱帽工位c。试管被输送至脱帽工位c后,夹持组件3对试管进行夹持固定,脱帽机构4将试管的试管帽取下。脱帽机构4将试管帽取下后,夹持组件3松开试管,转盘机构1转动,将脱帽工位c处经过脱帽后的试管输送至下料工位d,此时,上料工位a的试管被输送至识别工位b,识别工位b中经过拍照识别的试管被输送至脱帽工位c继续进行脱帽工作。经过脱帽的试管被输送至下料工位d,经过脱帽的试管在下料工位d出下料,此时下料工位d处的固定组件13回到空料状态。在经过脱帽的试管被输送至下料工位d的过程中,脱帽机构4松开试管帽,脱帽机构4回到空料状态。
30.具体的,转盘机构1设置有第一电机11、安装板12,安装板12为“十”字形,固定组件13的数量为四个,固定组件13安装于安装板12,第一电机11通过连接轴14带动安装板12转动,脱帽工位c下方设置有回收漏斗5。
31.可以理解的,“十”字形的安装板12的四个角分别对应上料工位a、识别工位b、脱帽工位c及下料工位d,四个固定组件13分别安装于安装板12的四个角,当第一电机11转动时,
带动连接轴14转动,进而带动安装板12转动。当安装板12转动时,带动四个固定组件13在上料工位a、识别工位b、脱帽工位c及下料工位d之间流转,以使脱帽机完成对试管的上料、识别、脱帽、下料。试管在脱帽工位c处通过脱帽机构4脱帽后,经过脱帽的试管被输送至下料工位d的过程中,脱帽机构4松开试管帽,试管帽落入脱帽工位c下方的回收漏斗5,脱帽机构4回到空料状态。
32.具体的,固定组件13包括定位块131、锁紧环133、弹片134,定位块131设置有定位槽132,弹片134的数量为三个或三个以上,弹片134呈圆周均匀分布于定位块131周围,锁紧环133用于将弹片134紧锁于定位块131,弹片134设置有导向斜面135。
33.可以理解的,当对试管进行上料时,将试管插入固定组件13。当试管插入固定组件13时,试管在导向斜面135的导向下滑入均匀分布于定位块131周围的弹片134之间,进而进入定位块131的定位槽132内,通过弹片134对试管进行夹紧。当对试管进行下料时,只需将试管从固定组件13处抽出即可,弹片134具有弹性,可以适应对不同直径试管的夹紧。
34.具体的,夹持组件3包括第二电机31,第二电机31的输出轴连接有第一丝杆32,第一丝杆32适配有第一螺母块33,第一螺母块33连接有第一推拉杆34,第一推拉杆34连接有抱紧组件35,抱紧组件35包括安装块351,安装块351安装有第一抱紧块352及第二抱紧块353,第一抱紧块352与第二抱紧块353的端部均安装有夹块354,第一抱紧块352与第二抱紧块353均能在安装块351处转动,第一抱紧块352与第二抱紧块353对称布置于第一推拉杆34的两侧,第一推拉杆34与第一抱紧块352背离夹块354的端部相连,第一推拉杆34与第二抱紧块353背离夹块354的端部相连。
35.可以理解的,当试管被输送至脱帽工位c后,第二电机31转动,进而带动第一丝杆32转动,从而带动第一螺母块33移动。当第一螺母块33移动时,带动第一推拉杆34拉动抱紧组件35的第一抱紧块352与第二抱紧块353,使第一抱紧块352与第二抱紧块353在安装块351处转动,此时,第一抱紧块352与第二抱紧块353安装有夹块354的端部相互靠近,直至抱紧组件35抱紧试管。当抱紧组件35松开试管时,第二电机31改变转动方向,进而带动第一丝杆32改变转动方向,从而改变第一螺母块33的移动方向,此时,第一抱紧块352与第二抱紧块353安装有夹块354的端部相互远离,抱紧组件35松开试管。
36.具体的,脱帽机构4包括升降组件41、夹紧组件42及转动组件43,升降组件41带动夹紧组件42及转动组件43上升或下降,夹紧组件42用于对试管帽进行夹紧,转动组件43用于带动夹紧组件42转动。
37.可以理解的,当对试管进行脱帽时,升降组件41带动夹紧组件42及转动组件43下降,直至夹紧组件42到达试管帽处,可以适应不同高度的试管。夹紧组件42夹紧试管帽,转动组件43带动夹紧组件42转动,进而将试管帽从试管处拧出。完成脱帽后,升降组件41带动夹紧组件42及转动组件43上升,夹紧组件42松开试管帽,使试管帽落入回收漏斗5。
38.具体的,夹紧组件42包括第三电机421,第三电机421的输出轴连接有第二丝杆422,第二丝杆422适配有第二螺母块423,第二螺母块423连接有第二推拉杆424,第二推拉杆424连接有夹爪组件427,夹爪组件427包括第一连杆4271及第二连杆4272,第一连杆4271与第二连杆4272对称布置于第二推拉杆424的两侧,第一连杆4271与第二连杆4272的端部均连接有夹爪块4273,夹爪块4273设置有卡帽槽4274,第二推拉杆424推出时,第一连杆4271与第二连杆4272均转动,带动两夹爪块4273相互远离,带动第二推拉杆424拉回时,第
一连杆4271与第二连杆4272均转动,带动两夹爪块4273相互靠近。
39.可以理解的,当夹紧组件42夹紧试管帽时,第三电机421转动,进而带动第二丝杆422转动,从而带动第二螺母块423移动。当第二螺母块423移动时,带动第二推拉杆424拉动第一连杆4271及第二连杆4272,从而带动两夹爪块4273相互靠近,实现对试管帽的夹紧。当夹紧组件42松开试管帽时,第三电机421的转动方向改变,进而带动第二丝杆422的转动方向改变,从而带动第二螺母块423的移动方向改变,此时,第二推拉杆424推动第一连杆4271及第二连杆4272,从而带动两夹爪块4273相互远离,实现对试管帽的松开。
40.具体的,夹紧组件42还设置有防黏件425,防黏件425设置有折板426,折板426与卡帽槽4274相对应。
41.可以理解的,当夹紧组件42夹紧试管帽时,试管帽卡入卡帽槽4274;当夹紧组件42松开试管帽时,第一连杆4271与第二连杆4272上的夹爪块4273相互远离,试管帽在重力的作用下掉入回收漏斗5。当试管帽被卡帽槽4274卡住无法掉落时,在第一连杆4271与第二连杆4272上的夹爪块4273相互远离的过程中,防黏件425的折板426伸入卡帽槽4274内,将试管帽从卡帽槽4274内推出,从而使试管帽能顺利掉落。
42.具体的,转动组件43包括第四电机431,第四电机431的输出轴连接有传动机构432,传动机构432包括主动同步轮433、从动同步轮434,主动同步轮433与从动同步轮434通过同步带435相连,从动同步轮434与夹紧组件42相连。
43.可以理解的,当夹紧组件42将试管帽夹紧后,第四电机431转动,进而带动主动同步轮433转动,在同步带435的传动下,从动同步轮434转动。从动同步轮434转动时带动夹紧组件42转动,从而实现将试管帽从试管处取下,,通过第四电机431的控制,夹紧组件42的转动方向可以实现正转或反转,夹紧组件的转动全数可调、可控、不受限制。
44.具体的,升降组件41包括第五电机411,第五电机411的输出轴安装有齿轮412,齿轮412适配有齿条413,齿条413与脱帽机相对固定,当第五电机411转动时,第五电机411在齿轮412的驱动下相对于齿条413上升或下降,夹紧组件42及转动组件43与第五电机411同步上升或下降。
45.可以理解的,当升降组件41带动夹紧组件42及转动组件43下降时,第五电机411转动,进而带动齿轮412转动,在齿轮412与齿条413的配合驱动下,第五电机411带着夹紧组件42及转动组件43下降;当升降组件41带动夹紧组件42及转动组件43上升时,第五电机411改变转动方向,进而带动齿轮412的转动方向改变,在齿轮412与齿条413的配合驱动下,第五电机411带着夹紧组件42及转动组件43上升。
46.另一方面,一种试管自动脱帽机的控制方法,用于对试管自动脱帽机进行控制,通过主控制器6向夹具控制器7发送控制信号,夹具控制器7的控制算法包括pid控制算法控制,以电流环系统做内环,速度环系统做外环,其步骤包括:s1、试管上料至上料工位a,固定组件13对试管进行卡紧;s2、主控制器控制6第一电机11转动,转盘机构1将试管带动至识别工位b;s3、相机2对试管进行拍照,主控制器6根据试管的图像信息判断试管中的血样是否合格、试管标签是否清晰及试管型号;s4、主控制器6控制第一电机11转动,转盘机构1将试管带动至脱帽工位c;s5、夹具控制器7通过速度环系统控制第二电机31转动带动第一丝杆32转动,带动
抱紧组件35动作;s6、当抱紧组件35碰到试管时,夹具控制器7的电流环系统立即相应,以恒定的力矩电流进行恒流控制,第二电机31停止,并以恒定的力矩抱紧试管;s7、主控制器6控制第五电机411转动,升降组件41带动夹紧组件42及转动组件43一同下降;s8、夹具控制器7通过速度环系统控制第三电机421转动,夹爪组件427动作;s9、当夹爪组件427碰到试管帽时,夹具控制器7的电流环系统立即相应,以恒定的力矩电流进行恒流控制,第三电机421停止,并以恒定的力矩抱紧试管帽;s10、主控制器6控制第四电机431转动,转动组件43带动夹紧组件42转动,进而将试管帽从试管头部取出;s11、夹具控制器7控制第二电机31转动带动第一丝杆32转动,抱紧组件35解除对试管的抱紧;s12、夹具控制器7控制第一电机11转动,转盘机构1将脱完试管帽的试管带动至下料工位d,第三电机421转动,夹爪组件427松开试管帽,将试管帽丢落至回收漏斗5。
47.可以理解的,夹具控制器7采用宽电压控制,其控制电压的范围为16v-36v,通过pid控制算法进行转速电流双闭环输出控制,使脱帽机的控制更加稳定、可靠,并且实现双路输出独立硬件过流保护,使控制系统能的适应性更强,pid控制算法控制使脱帽机夹持试管帽时,其力矩电流更加精细可调。
48.进一步的,主控制器6通过h桥拓扑结构向夹具控制器7发送控制信号,夹具控制器7进行控制时,通过arm芯片向信号放大器发送pwm驱动信号,进而通过功率放大器控制电机运行,并通过对电机的电流进行监测后将监测到的数据反馈至arm芯片,对电机进行伺服控制。
49.可以理解的,主控制器6通过h桥拓扑结构pwm互补控制,接口控制电压可选择高电平或低电平有效适应不同主控接口。采用高精度电流检测芯片对电机电流进行检测,从而使控制更加精准。
50.进一步的,夹具控制器7设置有恒流控制系统,恒流控制系统设置有大功率绝缘栅极晶体管。
51.可以理解的,夹具控制器7的控制单元与功率单元完全隔离,使控制系统具有良好的电磁抗干扰能力及更强的电磁兼容性,恒流控制系统设置有大功率绝缘栅极晶体管能有效保证高效可靠的输出。
52.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1