一种智能安瓿瓶切割器
1.本发明涉及切割设备技术领域,特别是一种智能安瓿瓶切割器。
背景技术:
2.医护人员在使用针剂时,需要将安瓿瓶中的药剂抽到注射器中,普遍采用的做法是,医护人员一手拿着安瓿瓶,一手拿着小砂轮对安瓿瓶的头部进行划痕,然后医护人员再用手掰断,或者用硬物将安瓿瓶头部打掉,手动使用砂轮对安瓿瓶颈部横向切割划痕,易导致切割痕迹歪斜,不便于掰断安瓿瓶瓶头,同时徒手掰断还容易使医护人员手受伤,工作效率低。
技术实现要素:
3.本发明的目的是为了解决上述问题,设计了一种智能安瓿瓶切割器,避免手动打开安瓿瓶,划伤手,提高工作效率。
4.实现上述目的本发明的技术方案为:一种智能安瓿瓶切割器,包括底座、两个丝杆模组、主箱体、磁铁、铁片、收集箱以及挡板,两个所述丝杆模组安装于底座上壁面上,所述主箱体安装于两个所述丝杆模组移动端上,所述磁铁嵌装于主箱体外侧壁面上,所述铁片活动贴合于磁铁上,所述收集箱安装于铁片上,所述挡板安装于收集箱侧壁面上,所述底座以及主箱体上设有切割结构;
5.所述切割结构包括:若干个通过孔、横板、若干个转动座、若干个套筒、联动组件、动力组件、划痕组件、敲击组件以及若干个升降组件;
6.若干个所述通过孔等距离开设于主箱体上壁面上,所述横板安装于主箱体内侧壁面上,若干个所述转动座与若干个所述通过孔相互对应的活动插装于横板上壁面上,若干个所述套筒分别活动插装于若干个所述通过孔,且若干个所述套筒分别安装于若干个所述转动座上,所述联动组件安装于主箱体内侧壁面以及若干个所述套筒上,所述动力组件安装于主箱体以及横板上,所述划痕组件安装于底座上,所述敲击组件安装于主箱体上壁面上,若干个所述升降组件分别安装于若干个所述套筒内侧壁面上。
7.优选的,若干个所述套筒内部均设有若干个第三气缸,若干个所述第三气缸的伸缩端上均设有夹板。
8.优选的,所述联动组件包括:滑槽、齿条以及若干个外齿圈;
9.所述滑槽安装于主箱体内侧壁面上,所述齿条活动安装于滑槽上,若干个所述外齿圈分别套装于若干个所述套筒上,若干个所述外齿圈与齿条啮合。
10.优选的,所述动力组件包括:电机以及主动齿轮;
11.所述电机安装于主箱体内侧底面上,且所述电机驱动端活动插装于横板上,所述主动齿轮套装于电机驱动端上,且所述主动齿轮与若干个所述外齿圈的其中一个所述外齿圈相互啮合。
12.优选的,所述划痕组件包括:两个第一气缸、两个连接杆以及磨砂板;
13.两个所述第一气缸均通过支架安装于底座上,两个所述连接杆分别安装于两个所述第一气缸伸缩端上,所述磨砂板安装于两个所述连接杆上。
14.优选的,所述两个连接杆与磨砂板之间均设有加强筋。
15.优选的,所述敲击组件包括:电动转盘、支杆以及敲击杆;
16.所述电动转盘安装于主箱体上壁面上,所述支杆安装于电动转盘上,所述敲击杆安装于支杆一端。
17.优选的,所述敲击杆位于磨砂板上方。
18.优选的,若干个所述升降组件均包括:第二气缸以及升降板;
19.所述第二气缸安装于套筒内侧底面上,所述升降板安装于第二气缸伸缩端上。
20.优选的,若干个所述套筒内侧壁面上均设有若干个滑轨,若干个所述滑轨的移动端均安装于升降板上。
21.利用本发明的技术方案制作的智能安瓿瓶切割器,多个安瓿瓶同时分别置于主箱体上的多个套筒中,通过联动组件以及动力组件使多个安瓿瓶转动,利用划痕组件对多个安瓿瓶同时切割划痕,再利用敲击组件使安瓿瓶瓶头脱落,随后主箱体横移,使安瓿瓶远离划痕组件,处于备吸状态,无需医护人员手动掰断安瓿瓶,防止医护人员手部受伤,提高了工作效率。
附图说明
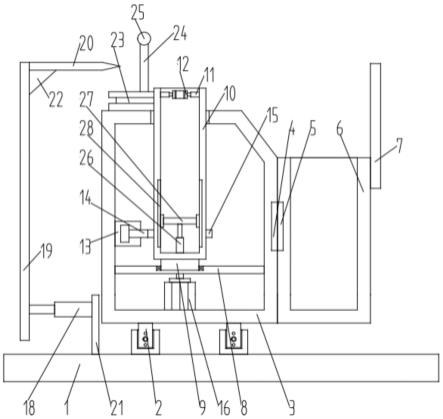
22.图1为本发明所述一种智能安瓿瓶切割器的左视剖视结构示意图。
23.图2为本发明所述一种智能安瓿瓶切割器的右视剖视结构示意图。
24.图3为本发明所述一种智能安瓿瓶切割器的主视结构示意图。
25.图4为本发明所述一种智能安瓿瓶切割器的俯视结构示意图。
26.图5为本发明所述一种智能安瓿瓶切割器的俯视剖视结构示意图。
27.图中:1、底座,2、丝杆模组,3、主箱体,4、磁铁,5、铁片,6、收集箱,7、挡板,8、横板,9、转动座,10、套筒,11、第三气缸,12、夹板,13、滑槽,14、齿条,15、外齿圈,16、电机,17、主动齿轮,18、第一气缸,19、连接杆,20、磨砂板,21、支架,22、加强筋,23、电动转盘,24、支杆,25、敲击杆,26、第二气缸,27、升降板,28、滑轨。
具体实施方式
28.下面结合附图对本发明进行具体描述,如图1-5所示,一种智能安瓿瓶切割器。
29.通过本领域人员,将本案中所有电气件与其适配的电源通过导线进行连接,并且应该根据实际情况,选择合适的控制器,以满足控制需求,具体连接以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,不在对电气控制做说明。
30.实施例:一种智能安瓿瓶切割器,包括底座1、两个丝杆模组2、主箱体3、磁铁4、铁片5、收集箱6以及挡板7,两个丝杆模组2安装于底座1上壁面上,主箱体3安装于两个丝杆模组2移动端上,磁铁4嵌装于主箱体3外侧壁面上,铁片5活动贴合于磁铁4上,收集箱6安装于铁片5上,挡板7安装于收集箱6侧壁面上,其特征在于,底座1以及主箱体3上设有切割结构;
31.其中需要说明的是:安瓿瓶置于主箱体3中,通过切割结构对安瓿瓶瓶颈位置进行
切割,在切割完成后敲击掉安瓿瓶的瓶头,挡板7用于遮挡安瓿瓶的瓶头,使安瓿瓶的瓶头掉落在收集箱6中,随后两个丝杆模组2移动,使主箱体3带动安瓿瓶离开切割区;
32.在具体实施过程中,切割结构可优选采用以下结构,其包括:若干个通过孔、横板8、若干个转动座9、若干个套筒10、联动组件、动力组件、划痕组件、敲击组件以及若干个升降组件;若干个通过孔等距离开设于主箱体3上壁面上,横板8安装于主箱体3内侧壁面上,若干个转动座9与若干个通过孔相互对应的活动插装于横板8上壁面上,若干个套筒10分别活动插装于若干个通过孔,且若干个套筒10分别安装于若干个转动座9上,联动组件安装于主箱体3内侧壁面以及若干个套筒10上,动力组件安装于主箱体3以及横板8上,划痕组件安装于底座1上,敲击组件安装于主箱体3上壁面上,若干个升降组件分别安装于若干个套筒10内侧壁面上;
33.其中需要说明的是:安瓿瓶插入套筒10中,作为优选的,更进一步的,若干个套筒10内部均设有若干个第三气缸11,若干个第三气缸11的伸缩端上均设有夹板12,用于根据不同安瓿瓶的瓶口尺寸,对安瓿瓶进行卡紧固定;
34.在具体实施过程中,联动组件可优选采用以下结构,其包括:滑槽13、齿条14以及若干个外齿圈15;滑槽13安装于主箱体3内侧壁面上,齿条14活动安装于滑槽13上,若干个外齿圈15分别套装于若干个套筒10上,若干个外齿圈15与齿条14啮合;
35.在具体实施过程中,动力组件可优选采用以下结构,其包括:电机16以及主动齿轮17;电机16安装于主箱体3内侧底面上,且电机16驱动端活动插装于横板8上,主动齿轮17套装于电机16驱动端上,且主动齿轮17与若干个外齿圈15的其中一个外齿圈15相互啮合;
36.其中需要说明的是:电机16工作,带动主动齿轮17转动,与主动齿轮17啮合的外齿圈15转动,齿条14因此在滑槽13上移动,其余外齿圈15均转动,即安瓿瓶转动;
37.在具体实施过程中,划痕组件可优选采用以下结构,其包括:两个第一气缸18、两个连接杆19以及磨砂板20;两个第一气缸18均通过支架21安装于底座1上,两个连接杆19分别安装于两个第一气缸18伸缩端上,磨砂板20安装于两个连接杆19上;
38.其中需要说明的是:两个第一气缸18收缩,使磨砂板20贴合安瓿瓶瓶颈,进行划痕切割,作为优选的,更进一步的,两个连接杆19与磨砂板20之间均设有加强筋22;
39.在具体实施过程中,敲击组件可优选采用以下结构,其包括:电动转盘23、支杆24以及敲击杆25;电动转盘23安装于主箱体3上壁面上,支杆24安装于电动转盘23上,敲击杆25安装于支杆24一端;
40.其中需要说明的是:划痕后,电动转盘23工作,通过支杆24带动敲击杆25转动,使敲击杆25将安瓿瓶瓶头敲击下来,作为优选的,更进一步的,敲击杆25位于磨砂板20上方;
41.在具体实施过程中,若干个升降组件均可优选采用以下结构,其包括:第二气缸26以及升降板27;第二气缸26安装于套筒10内侧底面上,升降板27安装于第二气缸26伸缩端上;
42.其中需要说明的是:安瓿瓶瓶头敲击下来后,第二气缸26伸长,通过升降板27推动安瓿瓶上升,使安瓿瓶处于备吸状态,作为优选的,更进一步的,若干个套筒10内侧壁面上均设有若干个滑轨28,若干个滑轨28的移动端均安装于升降板27上,用于支撑升降板27。
43.上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1