基于3D视觉的无人机加油方法及系统与流程
本发明属于工业无人机自动加油领域、机器视觉,更具体的说,涉及一种基于3d视觉的无人机加油方法及系统。
背景技术:
1、目前,油动无人机加油多为人工操作,针对无人机机巢中大批量无人机加油,人工操作困难,自动化、智能化程度低,严重影响无人机运作效率。而传统的机器人引导只能通过示教器示教,无法满足复杂变化的工况环境,当工件位置或者工作环境发生改变时,需要重新示教,极大限制了机器人工作效率与工作场景。
技术实现思路
1、本发明的目的在于提供一种基于3d视觉的无人机加油方法及系统,可有效解决目前加油效率慢、无法自动加油问题,自动定位油箱位置,实现自动加油,满足高精度、节拍快要求。本文采用的技术方案如下:
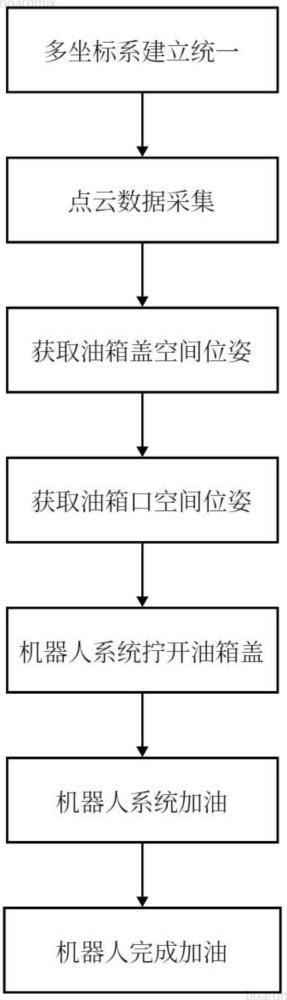
2、一种基于3d视觉的无人机加油方法,包括以下步骤:
3、步骤1、建立四个坐标系,并建立坐标系之间的坐标转换关系,以实现相关坐标系之间的统一,最后将坐标转化关系存储至控制系统;
4、其中,引入的坐标系包括:油枪末端坐标系,夹爪末端坐标系,3d视觉系统坐标系,机器人基座标系;
5、机器人基座标系基于机器人系统,机器人系统包括机器人;
6、夹爪、油枪安装在机器人末端;3d视觉系统固定在机器人末端
7、坐标转换关系包括:3d视觉系统坐标系与机器人基座标系之间的转换关系一、油枪末端坐标系与机器人基座标系之间的转换关系二、夹爪末端坐标系与机器人基座标系之间的转换关系三;
8、步骤2、油箱附近点云数据采集,具体包括以下步骤:
9、步骤21、无人机升降系统在停靠无人机后附近;
10、步骤22、控制系统请求拍照信号,并将拍照信号发送至3d视觉系统;
11、步骤23、3d视觉系统对无人机油箱附近点云进行图像采集,并将点云数据发送至控制系统;
12、步骤3、获取油箱盖空间位姿信息,具体包括以下步骤:
13、步骤31、定位油箱盖图像位置:控制系统对接收到点云数据的2d图像处理,生成油箱盖roi框,并获取成油箱盖roi框点云;
14、步骤32:获取油箱盖点云,具体包括以下步骤:
15、步骤321、基于roi框,映射到步骤23输出的点云数据的三维坐标,获取油箱盖处点云信息;
16、步骤322、通过点云剪裁,获取油箱盖处点云;
17、步骤33:获取油箱盖空间位姿,具体包括以下步骤:
18、步骤331:在夹爪坐标系下,建立夹爪夹紧油箱盖时形成的参考模板,并定义在参考模板中夹爪原点的初始位姿;
19、具体包括以下步骤:
20、设置油箱盖cad模型,并将其导入仿真软件中,以与仿真软件机器人系统模型中的夹爪模型配对以形成参考模板;
21、在该位姿下,夹爪可以夹紧油箱盖并拧开,此时,夹爪原点的初始位姿{x,y,z,rx,ry,rz},其中,x、y、z均为坐标,rx,ry,rz均为欧拉角;
22、步骤332:获取步骤322中输出的油箱盖处点云与和油箱盖cad模型配准时的配准矩阵t,具体包括:
23、将步骤322中油箱盖处点云和步骤331中的油箱盖cad模型配准,获取配准矩阵t;
24、其中,点云基于3d视觉系统坐标系,配准矩阵t在3d视觉系统坐标系下生成;
25、步骤333:油箱盖的位姿转换,具体包括以下步骤:
26、步骤333a、基于转换关系一和转换关系三,将配准矩阵t转换到夹爪坐标系中,得到矩阵t1;
27、其中,t1=(t转换关系三-1)*((t转换关系一)*t*(t转换关系一-1))*t转换关系三;
28、步骤333b、基于矩阵t1和夹爪原点的初始位姿{x,y,z,rx,ry,rz},通过将初始位姿左乘t1,获取每次油箱盖被夹爪夹紧时,夹爪原点在夹爪坐标系的位姿{x1,y1,z1,rx1,ry1,rz1};
29、其中,当无人机每次停靠的位置变化时,每次油箱盖上任一x点在夹爪坐标系系下的位姿不同;油箱盖上x点相对于夹爪原点的位置固定,
30、当无人机每次停靠的位置变化时(小范围波动),对应的配准矩阵t发生变化。
31、步骤333c、将位姿{x1,y1,z1,rx1,ry1,rz1}存储至控制系统,以供步骤5调用;
32、步骤4、获取油箱口空间位姿信息,具体包括以下步骤:
33、步骤41、获取油箱口点云主体,即点集{p}:根据步骤322中输出的油箱盖处点云,进行点云剪裁,噪点剔除,获取油箱口点云主体,包括油箱口端口点云端口及附近的点云;
34、步骤42、获取油箱口端口点云,即点集{pb},具体包括以下步骤:
35、边缘提取,采用滚球法进行边缘提取,获取油箱盖边缘点云,即点集{pnew};
36、计算油箱盖边缘点云质心c,并按照质心缩放点云,以形成油箱口端口点云{pb};
37、步骤43、获取油枪的朝向,具体包括:
38、对油箱口端口点云{pb}进行平面拟合,获取油箱口端口的点所在平面方程a3 x+b3 y+c3 z+d=0;
39、其中,平面方程的法线向量(a3,b3,c3),即油箱口端口向量;
40、其中,质心c、法线向量(a3,b3,c3)均基于3d视觉系统坐标系;
41、步骤44、获取油箱口端口空间位姿,具体包括以下步骤:
42、步骤441、基于转换关系一和转换关系二,将质心c、法线向量(a3,b3,c3)转换至油枪坐标系下,分别对应得到cnew、向量(anew,bnew,cnew);
43、其中,新转换关系为:(t转换关系二-1)*((t转换关系一)*t*(t转换关系一-1))*t转换关系二
44、步骤442、确定油枪的朝向,具体包括:
45、判断向量(anew,bnew,cnew)与默认加油位姿(ain,bin,cin)之间的角度是否大于90度;若是,油枪的朝向为cnew,{-anew,-bnew,-cnew},否则,油枪的朝向为cnew、向量(anew,bnew,cnew);
46、其中,默认加油位姿(ain,bin,cin)为设定值;
47、步骤443、将油枪朝向储至控制系统,以供步骤6调用;
48、步骤5:机器人系统拧开油箱盖:根据步骤333c输入至控制系统的位姿信息,移动机器人末端夹爪至油箱盖处,夹爪夹紧油箱盖,之后拧开油箱盖;
49、步骤6:机器人系统加油:根据步骤443输入至控制系统的油枪朝向,移动油枪到对应处,进行加油;
50、步骤7:机器人完成加油,归位。
51、优选地,步骤42具体包括以下步骤:
52、步骤421、设置一个判别半径r,在点集{p}中过任意两点p1、p2绘制半径为r的圆;
53、若圆内没有其他数据点,判断点p1、p2是边界点,其连线p1p2为边界线段;
54、步骤422、遍历点集{p}中任意两点,重复步骤1,得到边界点集{pnew};
55、步骤423、计算点集{pnew}质心,得到质心c,质心为空间坐标{x,y,z};
56、步骤424、将点集{pnew}按照质心c进行缩放k倍,此时得到油箱口端口点云{pb};其中,k为设定值。
57、优选地,步骤31具体包括以下步骤:
58、采用阿尔法均值滤波器对3d视觉系统中左相机2d图像m进行滤波,得到新的m1,采用非线性校正进行图像对比度校正;
59、采用surf目标识别方法,识别无人机油箱盖,进行roi框定位并获取roi框坐标。
60、优选地,步骤43中采用最小二乘法拟合平面方程。
61、优选地,步骤7具体包括:
62、机器人完成加油,根据控制系统发送的停止信号,油枪停止注油,机器人携带油枪移出加油口,夹爪移动油盖移至油箱口并重新拧紧,拧紧后松开夹爪,机器人移至初始位。
63、一种基于3d视觉的无人机加油系统,包括:无人机升降系统、机器人系统、3d视觉系统、控制系统、夹爪及油枪;
64、所述无人机升降系统负责无人机的升降,通过升降无人机移至3d视觉系统的相机视野内;
65、所述机器人系统固定在无人机升降系统一侧,包括机器人本体,通过控制系统发送的信息携带夹爪或油枪进行操作;
66、所述3d视觉系统包括3d相机,其固定在机器人末端,且通过介质与控制系统进行信息连接,负责油箱图像数据采集并传回控制系统;
67、所述控制系统包括上位机,通过3d相机传回的数据计算无人机油箱盖及油箱口位姿,并将两位姿发送至机器人系统;
68、所述夹爪、油枪安装在机器人末端,夹爪负责拧开无人机油箱盖,油枪负责插入油箱口加油。
69、与现有技术相比,本发明的优点为:
70、1、通过3d视觉系统采集油箱盖点云,并能够自动定位油箱盖及油箱口空间位姿,实时调整夹爪及油枪位姿,实现自动加油,识别精度高,效率高。
71、2、通过对无人机油箱盖和油箱口的精确定位识别,系统可适应多种型号的油动无人机,提高机器人柔性化生产水平,增加企业竞争力。
- 还没有人留言评论。精彩留言会获得点赞!