一种智能旋盖式试管开盖机
本技术涉及试管开盖机,具体的说是一种智能旋盖式试管开盖机。
背景技术:
1、以往,在生物学、细胞学、医学检测各部门以及科研实验室中,实验人员使用试管时通过人工开盖的方式对试管进行开盖,但人工开盖时由于试管内外压差会产生气溶胶,若操作者直接用手持试管进行开盖,则增加了受感染的风险,同时操作者直接用手操作增加了试管间交叉污染的可能性。因此自动试管开盖机应运而生。
2、现有的旋盖式试管开盖机主要以单次大批量开盖设计为主,包含试管固定装置、试管夹紧装置、旋转装置等,应用范围主要集中需要大批量开盖的试管开盖检测、取样和加样研究。因此,现有的旋盖式试管开盖机存在以下不足:
3、其一,实验人员需要通过双手操作,才能将试管安放到旋盖式试管开盖机内,并启动旋盖式试管开盖机,因此,不能适用于需要实验人员一手手持试管进行开盖机开盖、另一手对开盖后的旋盖式试管进行取样、加样工作的应用场景。
4、其二,产品过大并且设计不合理不适合放在生物安全柜中使用。
技术实现思路
1、本实用新型所要解决的技术问题是:提供一种智能旋盖式试管开盖机,以解决现有旋盖式试管开盖机不能适用于需要实验人员一手手持试管进行开盖机开盖、另一手对开盖后的旋盖式试管进行取样、加样工作的应用场景的问题。
2、解决上述技术问题,本实用新型所采用的技术方案如下:
3、一种智能旋盖式试管开盖机,其特征在于,包括:均安装在开盖机机身上的试管夹爪、光电感应模块、红外感应模块、主控制模块、夹紧电机驱动模块、旋转电机驱动模块和供电模块;其中,供电模块用于为智能旋盖式试管开盖机的各个组成部件提供相应的工作电源;
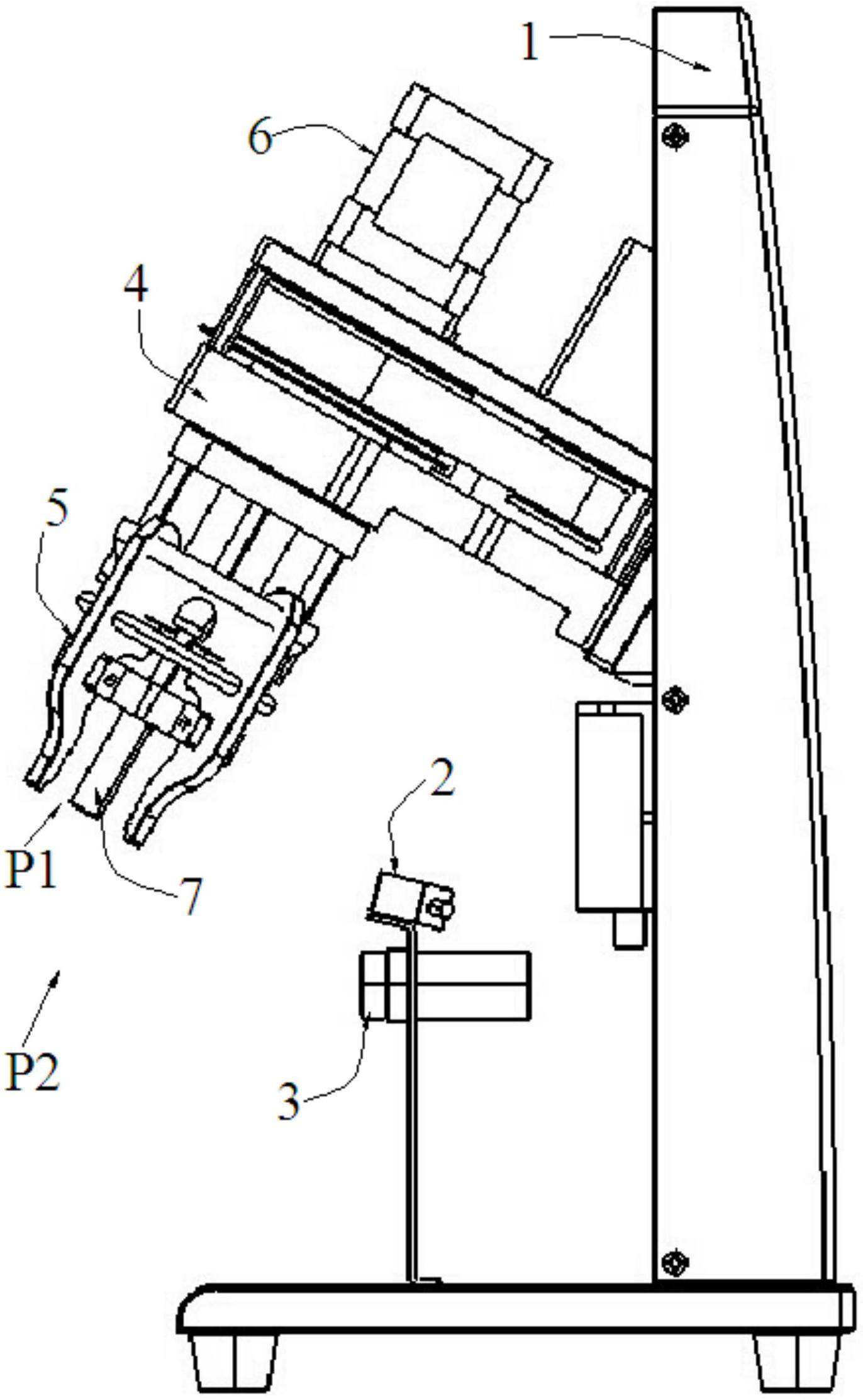
4、所述试管夹爪由夹爪安装架、电动夹持机构和电动旋转机构组成,夹爪安装架与开盖机机身固定连接,电动旋转机构固定在夹爪安装架上并能够驱动电动夹持机构自转,电动夹持机构能够在其夹持区域对旋盖式试管的管盖进行夹持;
5、所述光电感应模块的感应范围含盖电动夹持机构的夹持区域,红外感应模块的感应范围含盖所述夹持区域的下方区域,光电感应模块的输出端、红外感应模块的输出端、夹紧电机驱动模块的输入端、旋转电机驱动模块的输入端分别与主控制模块电性连接,以使得:
6、所述夹紧电机驱动模块能通过主控制模块接收光电感应模块的输出信号,并响应于光电感应模块输出的感应触发信号,即时驱动电动夹持机构作出夹持动作;
7、所述旋转电机驱动模块能通过主控制模块接收红外感应模块的输出信号,并响应于红外感应模块输出的感应触发信号,延时驱动电动旋转机构作出正向旋转驱动动作。
8、从而,本实用新型的智能旋盖式试管开盖机的使用方式如下:
9、由实验人员一手手持未使用的旋盖式试管,并使旋盖式试管的管盖伸至电动夹持机构的夹持区域,在此情况下:光电感应模块感应到处于夹持区域中的管盖而输出感应触发信号,夹紧电机驱动模块响应该感应触发信号而即时驱动电动夹持机构作出夹持动作,实现试管夹爪对管盖的夹紧;而红外感应模块感应到处于下方区域的实验人员用于手持旋盖式试管的手而输出感应触发信号,旋转电机驱动模块响应该感应触发信号而延时驱动电动旋转机构作出正向旋转驱动动作,带动电动夹持机构连同受其夹持的管盖一起正向自转,实现试管夹爪对管盖的开盖旋转。
10、而在试管夹爪完成对管盖的开盖后,实验人员可以继续一手手持旋盖式试管的管身并离开智能旋盖式试管开盖机,实验人员的另一只手则可以解放出来,以便于对旋盖式试管进行取样、加样等实验操作。
11、优选的:所述试管夹爪在开盖机机身上的布置方式同时满足:所述电动夹持机构的自转轴倾斜布置,且所述电动夹持机构相对于电动旋转机构更靠下,所述电动旋转机构相对于电动夹持机构更靠近开盖机机身。从而,能够更方便实验人员的使用。
12、优选的:所述智能旋盖式试管开盖机设有具备夹爪过孔的开盖机外壳,开盖机外壳罩在所述开盖机机身、试管夹爪、光电感应模块、红外感应模块、主控制模块、夹紧电机驱动模块、旋转电机驱动模块和供电模块之外,且所述电动夹持机构的夹头部分从所述开盖机外壳的夹爪过孔伸出至外界,使得电动夹持机构的夹持区域位于开盖机外壳的外部。
13、作为本实用新型的优选实施方式:所述试管夹爪还设有定位杆,该定位杆与电动夹持机构滑动配合并与电动夹持机构的自转轴线共轴,且该定位杆的下端部与电动夹持机构的夹持区域相接,该定位杆的上端部与电动夹持机构之间设有压力传感模块;
14、所述压力传感模块的输出端与主控制模块电性连接,以使得:
15、所述夹紧电机驱动模块能通过主控制模块接收压力传感模块的输出信号,并响应于压力传感模块输出的压力触发信号,延时驱动电动夹持机构作出松开夹持动作;
16、所述旋转电机驱动模块能通过主控制模块接收压力传感模块的输出信号,并响应于压力传感模块输出的压力触发信号,即时驱动电动旋转机构作出反向旋转驱动动作。
17、其中,夹紧电机驱动模块响应所述压力触发信号的优先级高于响应光电感应模块所输出的感应触发信号;并且,夹紧电机驱动模块设有延时电路,夹紧电机驱动模块响应于压力传感模块的压力触发信号所输出的驱动信号经过该延时电路输出,以实现延时驱动电动夹持机构作出松开夹持动作,而响应于光电感应模块的感应触发信号所输出的驱动信号则不经过该延时电路而直接输出,以实现即时驱动电动夹持机构作出夹持动作;所述延时电路可以是现有技术中能够实现信号延时传输的信号传输电路。
18、其中,旋转电机驱动模块响应所述压力触发信号的优先级高于响应红外感应模块所输出的感应触发信号;并且,旋转电机驱动模块设有延时电路,旋转电机驱动模块响应于红外感应模块的感应触发信号所输出的驱动信号经过该延时电路输出,以实现延时驱动电动旋转机构作出正向旋转驱动动作,而响应于压力传感模块的压力触发信号所输出的驱动信号则不经过该延时电路而直接输出,以实现即时驱动电动旋转机构作出反向旋转驱动动作;所述延时电路可以是现有技术中能够实现信号延时传输的信号传输电路。
19、从而,在实验人员用智能旋盖式试管开盖机对旋盖式试管的管盖进行开盖时,实验人员可以通过将旋盖式试管的管盖放置到定位杆的下端部位置,实现旋盖式试管的管盖伸至电动夹持机构的夹持区域的准确定位。
20、而在实验人员完成对旋盖式试管的取样、加样等实验操作后,实验人员可以继续一手手持旋盖式试管,将旋盖式试管的管口放入被试管夹爪所夹紧的管盖中,并将旋盖式试管稍微用力压向管盖,使得管盖通过定位杆将压力作用于压力传感模块上,压力传感模块输出相应的压力触发信号,在此情况下:旋转电机驱动模块响应该压力触发信号而即时驱动电动旋转机构作出反向旋转驱动动作,带动电动夹持机构连同受其夹持的管盖一起反向自转,实现试管夹爪对管盖的关盖旋转;而夹紧电机驱动模块则响应该压力触发信号而延时驱动电动夹持机构作出松开夹持动作,实现试管夹爪对管盖的夹紧松开;由此,实现了由实验人员单手手持旋盖式试管来触发试管夹爪对管盖的关盖和松开。
21、所述主控制模块可以采用仅实现上述两个感应触发信号和一个压力触发信号的传输的信号传输电路板,也可以采用mcu、fpga等能够实现多个io口之间的信号传输的电路模块,以实现上述实施例中光电感应模块、红外感应模块、压力传感模块与夹紧电机驱动模块、旋转电机驱动模块之间的信号传输。
22、为了智能旋盖式试管开盖机能够实现更多样化的功能,作为本实用新型的优选实施方式:所述主控制模块采用微控制器及其外围电路实现,所述智能旋盖式试管开盖机还包括分别与主控制模块电性连接的按钮模块和触摸显示模块,以为通过按钮模块和触摸显示模块实现智能旋盖式试管开盖机的功能控制提供硬件基础,以及为触摸显示模块显示智能旋盖式试管开盖机的工作参数提供硬件基础。
23、优选的:所述智能旋盖式试管开盖机还包括夹爪旋转位置检测模块;所述夹爪旋转位置检测模块设有圆形挡片和对射光电传感器模块,所述对射光电传感器模块安装在开盖机机身上,且对射光电传感器模块的输出端与主控制模块电性连接,所述圆形挡片的边缘设有扇形缺口,该扇形缺口的角度优选为5°,所述圆形挡片通过传动机构连接电动旋转机构的旋转轴,以使得:所述圆形挡片跟随电动夹持机构旋转,并在电动夹持机构旋转至预设旋转角度位置时,所述圆形挡片的扇形缺口位于所述对射光电传感器模块的对射光路上,在电动夹持机构旋转离开所述预设旋转角度位置时,所述圆形挡片遮挡在所述对射光电传感器模块的对射光路上。从而,所述主控制模块能够通过对射光电传感器模块的输出信号检测电动夹持机构是否旋转至预设旋转角度位置,以为智能旋盖式试管开盖机实现需要基于试管夹爪的旋转角度位置来实现的功能提供硬件基础,如试管夹爪的旋转计数和复位位置定位等功能。
24、优选的:所述智能旋盖式试管开盖机还包括电动雾化装置和喷雾继电器控制模块;所述电动雾化装置的进口用于输入消毒液,该消毒液可以是酒精,所述电动雾化装置的喷雾口对准所述试管夹爪的夹头部分,所述电动雾化装置的电源端通过所述喷雾继电器控制模块连接供电电源,所述喷雾继电器控制模块的控制端与主控制模块电性连接。从而,为智能旋盖式试管开盖机实现对试管夹爪的夹头部分进行雾化消毒液消毒提供了硬件基础,以防止由于试管内液体的溅出到试管夹爪造成与其他试管交叉污染的风险。
25、优选的:所述智能旋盖式试管开盖机还包括语音识别模块;所述语音识别模块的输出端与主控制模块电性连接,以为智能旋盖式试管开盖机实现语音控制提供硬件基础。
26、优选的:所述智能旋盖式试管开盖机还包括wifi通讯模块,所述wifi通讯模块与主控制模块电性连接,以为智能旋盖式试管开盖机与远程终端实现通讯提供硬件基础。
27、优选的:所述智能旋盖式试管开盖机还包括usb接口模块,所述usb接口模块与主控制模块电性连接,以为智能旋盖式试管开盖机实现工作数据读取提供硬件基础。
28、与现有技术相比,本实用新型具有以下有益效果:
29、第一,本实用新型设有开盖机机身、试管夹爪、光电感应模块、红外感应模块、主控制模块、夹紧电机驱动模块、旋转电机驱动模块和供电模块,通过光电感应模块和红外感应模块能够感应到实验人员手持旋盖式试管并将瓶盖放置到夹持区域的动作,以产生相应的感应触发信号来分别通过夹紧电机驱动模块和旋转电机驱动模块驱动电动夹持机构和电动旋转机构作出夹持动作和正向旋转驱动动作,实现由实验人员单手手持旋盖式试管来触发试管夹爪对管盖的开盖旋转,因此,本实用新型能够适用于需要实验人员一手手持试管进行开盖机开盖、另一手对开盖后的旋盖式试管进行取样、加样工作的应用场景。
30、第二,本实用新型增设有定位杆和压力传感模块,通过压力传感模块能够感应到实验人员将旋盖式试管压向管盖的动作,以产生压力触发信号来分别通过旋转电机驱动模块和夹紧电机驱动模块驱动电动旋转机构和电动夹持机构作出反向旋转驱动动作和松开夹持动作,实现由实验人员单手手持旋盖式试管来触发试管夹爪对管盖的关盖和松开,因此,本实用新型还能够适用于需要实验人员在完成对旋盖式试管的取样、加样等实验操作后一手手持试管进行关盖的应用场景。
- 还没有人留言评论。精彩留言会获得点赞!