物体检测装置的制作方法
1.本技术涉及物体检测装置。
背景技术:
2.已知有adas(advanced driver-assistance systems:先进驾驶辅助系统),其利用将前方车辆与本车辆的车间距离保持为恒定的acc(adaptive cruise control:自适应巡航控制)系统、以及感知障碍物来防止碰撞的aebs(advanced emergency braking system:先进紧急制动系统)来辅助车辆的驾驶。例如,aebs中,获得本车辆的周边所存在的物体的信息的摄像头或雷达之类的检测装置搭载于车辆,将本车辆的移动方向上所存在的物体作为驾驶时需要控制的对象的物体(以下称为控制对象物)来检测,观察本车辆与控制对象物的位置关系和相对速度,并基于观测结果的数据来进行本车辆的驾驶辅助的控制。
3.adas中使用的车载用雷达中,提出了如下技术:相对于地面具有垂直方向的测角功能,基于检测到的对象物(以下称为检测对象物)的高度信息,来判定检测对象物是前方车辆或行人这样的控制对象物、还是道路的上方所设置的标示板或道路上的较薄的掉落物之类的非控制对象物(专利文献1)。
4.由于以往的车载用雷达装置不计算垂直方位,因此无法掌握目标距地面的高度,在检测到道路的上方所设置的标示板或道路上的较薄的掉落物的情况下,会误识别为正面的目标,且acc系统错误地动作,这里提出的内容以上述情况为技术问题,并解决该问题。即,在雷达装置中,作为垂直方向上的检测对象物相对于地面的方位即垂直方位,将发送波从发送天线向检测对象物发送,根据被检测对象物反射的反射波来计算位于地上的实像的方位,并且在由检测对象物反射后根据被地面所反射的反射波来计算地下所存在的虚像的方位,使用计算出的实像的方位与虚像的方位之间的角度差,来计算检测对象物距地面的高度。
5.即,专利文献1中公开了如下技术:通过处理从检测对象物得到的信息,从而能恰当地识别正面的控制对象物,而不会将设置在道路上方的标示板或道路上的较薄的掉落物错误地识别为控制对象物。现有技术文献专利文献
6.专利文献1:日本专利特开2014-52187号公报
技术实现要素:
发明所要解决的技术问题
7.专利文献1所提出的物体检测装置中,为了进行恰当的识别,采用各种信息进行了信息处理。然而,若采用较多的信息来进行信息处理,则信息量较多,因此产生运算量变多,
处理时间变长,响应性变差的问题。
8.因此,为了解决该问题,本技术的目的在于提供一种物体检测装置,基于本车辆所放置的环境信息、即物体检测部所放置的环境信息来选定进行垂直方位的测角的检测对象,由此能削减运算量。用于解决技术问题的技术手段
9.本技术的物体检测装置包括:物体检测部,该物体检测部检测预定的范围内的检测对象物;环境信息获取部,该环境信息获取部获取所述物体检测部所放置的环境信息,并输出与所述环境信息相对应的环境信息信号;以及垂直测角功能控制部,该垂直测角功能控制部基于所述环境信息信号,来控制对所述物体检测部进行垂直方向的测角的范围。发明效果
10.根据本技术的物体检测装置,物体检测装置能削减物体检测部的控制和信号处理的运算量。
附图说明
11.图1是示出实施方式1的结构的框图。图2是示出实施方式1的动作的流程图。图3是示出实施方式2的动作的流程图。图4是示出实施方式3的覆盖区域的示意图。图5是示出实施方式4的覆盖区域的示意图。图6是示出实施方式6的覆盖区域的示意图。图7是示出实施方式7的覆盖区域的示意图。图8是示出实施方式8的覆盖区域的示意图。图9是示出实施方式9的覆盖区域的示意图。图10是示出实施方式10的覆盖区域的示意图。图11是示出实施方式11的结构的框图。图12是实施方式11的物体检测部的搭载状态的示意图。图13是示出实施方式12的结构的框图。图14是实施方式12的rf模块电路的搭载状态的示意图。图15是示出硬件的一个示例的结构图。
具体实施方式
12.实施方式1以下,基于图1来说明实施方式1所涉及的物体检测装置。图1是示出实施方式1所涉及的物体检测装置100的框图。如图1所示,物体检测装置100包括物体检测部10、垂直测角功能控制部20和环境信息获取部30。物体检测部10由雷达控制电路11、rf模块电路12和信号处理电路13构成。rf模块电路12例如是将多个有源部件(ic芯片等)和无源部件(saw滤波器、电容器、电阻、线圈等)搭载于基板而得到的。
13.图1中,环境信息获取部30利用通信或传感器,来获取用于控制垂直测角功能的信
息a。信息a例如是本车辆的轨道、速度、前进方向、检测物体的相对速度和反射强度,将该信息a称为“环境信息”。环境信息获取部30将基于获取到的信息a的环境信息信号b输出到垂直测角功能控制部20。
14.垂直测角功能控制部20基于环境信息信号b,将信号c输出到物体检测部10的雷达控制电路11和信号处理电路13,并对雷达控制电路11和信号处理电路13中的至少一方的处理内容进行控制,以使得仅对符合预定条件的状态的控制对象进行垂直测角的处理。作为该处理内容的控制,例如是使进行垂直测角的距离范围、距离精度、速度范围、速度精度、角度范围、角度精度的范围变更的控制。用于进行该控制的信号c是“垂直测角功能控制信号”。另外,在由垂直测角功能控制部20控制的物体检测部10中,在物体的相对于地面垂直方向上的方位即垂直方位上,根据从发送天线(未图示)发送的发送波被物标反射后而得的反射波来计算位于地上的实像的方位即实像垂直方位,并且根据从发送天线发送的发送波被物体反射、且进一步反射到地面后的反射波来计算存在于地下的虚像的方位即虚像垂直方位。然后,物体检测部10中,对所计算出的实像垂直方位与虚像垂直方位之间的角度差进行计算,并使用计算出的角度差,来计算目标距地面的高度。然而,物体检测部10的垂直方位的计算方法可以为任意方法,例如,可以通过对波束进行机械控制或电气控制来计算垂直方位,也可以通过公知的波束成形法或超分辨率测角、单脉冲测角来计算垂直方位。
15.雷达控制部11对rf模块电路12进行与电波的收发有关的控制。与该电波的收发有关的控制例如是与发送波的频带、占有频带、采样频率、采样数、频率调制时间、发送ch、接收ch、频率调制定时有关的控制。进行该控制时,能基于信号c来变更控制的内容。
16.rf模块电路12按照rf模块电路控制信号d来进行电波的收发,并测定拍频信号e。信号处理电路13通过进行拍频信号e的频率分析,来计算例如到物体的距离、相对速度、方位角、仰角、反射强度,并将该结果作为输出信号f来输出。进行该信号处理时,能基于垂直测角功能控制信号c来变更信号处理的内容。另外,图1中的箭头表示信号的流动。
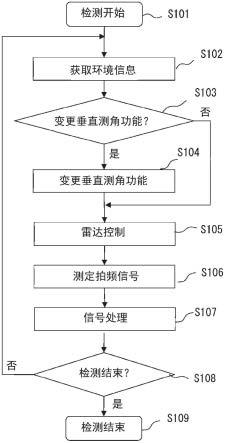
17.接着,对于实施方式1的动作,使用图2来说明。图2是示出实施方式1的动作的流程图。步骤s101中开始检测,在步骤s102中,环境信息获取部30利用通信或传感器来获取环境信息,垂直测角功能控制部20接收环境信息信号b。
18.步骤s103中,垂直测角功能控制部20基于环境信息来决定垂直测角功能的控制内容,并进行是否从前一个周期起变更了控制内容的判定。在变更了控制内容的情况下,转移到步骤s104,否则转移到步骤s105的雷达控制。步骤s104中,垂直测角功能控制部20输出垂直测角功能控制信号即信号c,以使得按照步骤s103中所决定的控制内容来变更雷达控制电路11或信号处理电路13中的至少一方的预先设定的处理内容。
19.步骤s105中,雷达控制电路11基于预先设定的处理内容来进行针对rf模块电路12的控制。步骤s106中,rf模块电路12基于雷达控制电路11所得出的rf模块电路控制信号d,来进行电波的收发和拍频信号的测定。步骤s107中,信号处理电路13基于预先设定的处理内容来进行针对拍频信号e的信号处理,并计算到检测出的物体的距离、物体的速度、方位角、仰角和信号强度等。步骤s108中,在判定为检测结束的情况下,在步骤s109中结束检测。在未判定为检
测结束的情况下,处理返回步骤s102,并重复环境信息的获取。通过该流程图所示的动作,基于环境信息来进行雷达的垂直测角功能的控制。其结果是,基于环境信息,在不需要变更垂直测角功能的情况下不进行测角功能的变更,因此,能省去无用的通信或计算。
20.实施方式2本实施方式2的结构与本实施方式1的结构相同。不同之处在于通过该结构所进行的动作。图3是示出本实施方式2的动作的流程图。接下来说明本实施方式2的动作与实施方式1的动作的差异。
21.实施方式2中,对于实施方式1的处理流程,使进行垂直测角功能的控制的处理流程与进行物体的检测的处理流程并行化。将判定是否进行垂直测角功能的控制的处理流程称为“垂直测角功能控制判定循环l1”,将进行物体的检测的处理流程称为“物体检测处理循环l2”。
22.垂直测角功能控制判定循环l1中,在步骤s201中开始检测,在步骤s202中,环境信息获取部30利用通信或传感器来获取环境信息,垂直测角功能控制部20接收环境信息信号b。步骤s203中,垂直测角功能控制部20基于环境信息信号b来决定垂直测角功能的控制内容,并进行是否从前一个周期起变更了控制内容的判定。此时,在变更了控制内容的情况下转移至步骤s204,并进行“向物体检测处理循环l2的中断”,在未变更控制内容的情况下,转移至步骤s205。
23.物体检测处理循环l2中,在步骤s301中开始检测,在步骤s302中判定是否产生了中断,在产生了中断的情况下,前进至步骤s303,否则转移到步骤s304的雷达控制。步骤s303中,垂直测角功能控制部20输出垂直测角功能控制信号即信号c,以使得按照步骤s303中所决定的控制内容来变更雷达控制电路11或信号处理电路13中的至少一方的预先设定的处理内容。
24.步骤s304中,雷达控制电路11基于预先设定的处理内容来进行针对rf模块电路12的控制。步骤s305中,rf模块电路12基于雷达控制电路11所得出的rf模块电路控制信号d,来进行电波的收发和拍频信号的测定。步骤s306中,信号处理电路13基于预先设定的处理内容来进行针对拍频信号e的信号处理,并计算检测到的物体的距离。步骤s307中,在判定为检测结束的情况下,在步骤s308中结束检测。在未判定为检测结束的情况下,处理返回至步骤s302,并重复环境信息的获取。
25.步骤s204中,在进行“向物体检测处理循环l2的中断”的情况下,垂直测角功能控制部20在物体检测处理循环中使步骤s303产生。反之,当不产生该中断时,步骤s303不产生。步骤s205中,在判定为检测结束的情况下,在步骤s206中结束检测。在未判定为检测结束的情况下,处理返回至步骤s202,之后同样地进行处理。
26.物体检测处理循环l2中,在步骤s302中,判定是否产生来自垂直测角功能控制判定循环的中断。在产生了中断的情况下,转移至步骤s303,在未产生中断的情况下,转移至
步骤s304。
27.步骤s303中,垂直测角功能控制部20输出垂直测角功能控制信号c,以使得按照垂直测角功能控制判定循环l1的步骤s203中预先设定的控制内容,来进行雷达控制电路11或信号处理电路13中的至少一方的处理内容的控制。
28.通过该结构,能并行地对垂直测角功能控制判定循环l1与物体检测处理循环l2进行信号处理,因此,能使物体检测的周期与垂直测角功能控制的周期分离并独立,具有与实施方式1同样的效果,并且能进行更为灵活的系统设计。此外,通过将步骤s303设为步骤s304的前阶段,从而能使针对雷达控制电路11和信号处理电路13的垂直测角功能变更的内容具有连贯性。
29.实施方式3图4是示出雷达的覆盖区域的示意图。环境信息获取部30中,获取本车辆x的速度,由垂直测角功能控制部20控制物体检测部10,以使得仅对检测到的物体中绝对速度v
target
在阈值v
th
以下的物体进行垂直方向的测角。例如,在图4的斜线部分s1为雷达的检测范围时,控制物体检测部10,以使得仅将绝对速度v
target
在阈值v
th
以下的物体设为垂直测角对象,并进行针对电波的收发和信号处理的控制。
30.由此,能通过高度的不同来区分设置在道路上方的标示板或道路上的较薄的掉落物那样的非控制对象即静止物、与因拥堵而停止的车辆那样的静止中的控制对象,与此同时,对于行驶在前方的车辆那样的移动中的控制对象不进行垂直测角,从而能进行高效的雷达控制和信号处理。
31.实施方式4图5是示出雷达的覆盖区域的示意图。在环境信息获取部30中,获取本车辆x的速度v
own
和指定时间,并利用垂直测角功能控制部20来控制物体检测部10,以使得仅对本车辆能在指定时间以内移动的距离范围进行垂直方向的测角。例如,在本车辆的速度为v
own
[m/s]且指定时间为t[s]的情况下,如图5的斜线部分s2那样,将进行垂直测角的距离范围设为v
own
·
t[m]以下。由此,能省略对本车辆在指定时间以内无法移动的距离的物体进行垂直测角,因此,能进行高效的雷达控制和信号处理。
[0032]
实施方式5在环境信息获取部30中,获取本车辆x的当前速度v
own
、目标速度、减速度和加加速度中的一个以上的信息、以及最小车间距离的设定值,并由垂直测角功能控制部20来控制物体检测部10,以使得对本车辆移动直到成为目标速度为止的距离加上最小车间距离后而得的距离以内的距离范围进行垂直方向的测角。最小车间距离的设定值可以由本车辆与前方车辆的车间时间来规定,也可以动态地变更。此外,最小车间距离的设定值可以始终设为0[m]并可以省略。该实施方式55的表示雷达的覆盖范围的示意图与实施方式4所示的图5相同。由此,即使在本车辆的前进方向上存在的静止物为控制对象的情况下,也可以根据能避免与控制对象的碰撞的距离来进行静止物是否是控制对象的判断。另外,通过仅在本车减速时应用本实施方式,并在本车减速时以外应用实施方式4,从而能将实施方式4与本实施方式组合来实施。由此,能判断进行与本车的加减速状况相
对应的垂直测角的对象。
[0033]
实施方式6图6是示出雷达的覆盖区域的示意图。在环境信息获取部30中,获取本车辆x将要前进的水平角度方向,并利用垂直测角功能控制部20来控制物体检测部10,以使得仅对本车辆x将要移动的水平角度范围θ[deg]进行垂直方向的测角。例如,在本车辆x将要向右前方前进的情况下,如图6的斜线部分s3那样,将进行垂直测角的水平角度范围θ[deg]仅限定为右前方。由此,可以省去对本车辆x的前进方向以外的物体进行垂直测角,因此,能进行高效的雷达控制和信号处理。
[0034]
实施方式7图7是示出雷达的覆盖区域的示意图。在环境信息获取部30中,获取本车辆x将要前进的轨道信息,并利用垂直测角功能控制部20来控制物体检测部10,以使得仅对本车辆x将要移动的轨道上进行垂直方向的测角。例如,在本车辆x将要右转的情况下,如图7的斜线部分s4那样,将进行垂直测角的距离范围和水平角度范围仅限定为右转的轨道的周边。此时,可以对相对于本车辆x的轨道具有针对轨道的获取误差的余量的范围进行垂直方向的测角。由此,能使本车辆x的前进轨道上或在该轨道上包含余量的范围以外的进行垂直测角的距离范围和水平角度范围减小,因此,能进行高效的雷达控制和信号处理。
[0035]
实施方式8图8是示出雷达的覆盖区域的示意图。环境信息获取部30中,获取检测对象的snr(signal-to-noiseratio:信噪比)和针对snr的阈值。对于snr较低的物体,测角精度变低,因此,由垂直测角功能控制部20来控制物体检测部10,以使得仅对snr超过阈值的检测对象进行垂直方向的测角。例如,在将snr的阈值设为5db时,在图8的斜线部分s5-1的区域的snr为10db的情况下,作为snr超过阈值的物体,进行垂直方向的测角。另一方面,在栅格部分s5-2的区域的snr为0db的情况下,作为snr低于阈值的物体,不进行垂直测角。由此,能省去针对snr较低的低位置物体或路面的垂直测角,因此,能进行高效的雷达控制和信号处理。此时,可以基于检测对象的反射信号强度而非snr,由垂直测角功能控制部20来控制物体检测部10,以使得仅对反射信号强度超过阈值的检测对象进行垂直方向的测角。另外,可以在由其它实施方式限制进行垂直方向的测角的范围的同时实施本实施方式。
[0036]
实施方式9图9是示出雷达的覆盖区域的示意图。环境信息获取部30中,获取本车辆x的速度、用于静止物判定的阈值、指定时间、本车辆x将要前进的水平方向,由垂直测角功能控制部20基于本车辆的速度、用于静止物判定的阈值和检测对象的相对速度来进行检测对象的静止物判定,并控制物体检测部10,以使得仅对被预测为本车辆x在指定时间内移动的距离、角度范围内的静止物进行垂直方向的测角。例如,如图9的斜线部s6那样,当本车辆x的速度为v
own
[m/s]且指定时间为t[s]时,将进行垂直测角的距离范围设为v
own
·
t[m]以下,并且将水平角度范围θ[deg]仅限定为右前方,且仅对静止物进行垂直测角。
[0037]
由此,能通过高度的不同来区分在道路上的标示板或掉落物那样的非控制对象即静止物、与因拥堵而停止的车辆那样的静止中的控制对象,与此同时,对于行驶在前方的车辆那样的移动中的控制对象不进行垂直测角。此外,能省去针对本车辆x无法在指定时间以内移动的距离的静止物或本车辆x的前进方向以外的静止物之类的、明显不与本车辆x发生碰撞的物体进行的垂直测角,因此,能进行高效的雷达控制和信号处理。
[0038]
实施方式10图10是示出雷达的覆盖区域的示意图。环境信息获取部30中,获取本车辆x的速度、用于静止物判定的阈值、指定时间、本车辆x将要前进的轨道,由垂直测角功能控制部20来控制物体检测部10,以使得仅对被预测为本车辆x在指定时间内移动的距离、角度范围内的静止物进行垂直方向的测角。例如,如图10的斜线部s7那样,当本车辆x的速度为v
own
[m/s]且指定时间为t[s]时,将进行垂直测角的距离范围设为v
own
·
t[m]以下,并且将距离范围和水平角度范围仅限定为右转的轨道的周边,且仅对静止物进行垂直测角。
[0039]
由此,能通过高度的不同来区分设置在道路上的标示板或掉落物那样的非控制对象即静止物、与因拥堵而停止的车辆那样的静止中的控制对象,与此同时,对于行驶在前方的车辆那样的移动中的控制对象不进行垂直测角。此外,能省去针对本车辆x无法在指定时间以内移动的距离的静止物或本车辆x的前进轨道上以外的静止物之类的、明显不与本车辆x发生碰撞的物体的垂直测角,因此,能进行高效的雷达控制和信号处理。
[0040]
实施方式11图11是示出实施方式11所涉及的物体检测装置100的框图。此外,图12是示出将实施方式11的物体检测装置100搭载于车辆的状态的结构图。除了物体检测部10以外,实施方式11的结构与实施方式1和实施方式2的结构相同。本实施方式11中,将物体检测部10在本车辆x的前方设置三处、在后方设置两处。此外,垂直测角功能控制部20搭载在本车辆x的内部。另外,其它部分与垂直测角功能控制部20同样地搭载在本车辆x的内部。由此,能对组合多个物体检测部10的覆盖区域后而得的覆盖区域进行垂直测角功能的控制,并且能在多个物体检测部间进行协作。
[0041]
实施方式12图13是示出实施方式12所涉及的物体检测装置100的物体检测部10、垂直测角功能控制部20和环境信息获取部30的框图。此外,图14是示出将实施方式12的物体检测装置100搭载于车辆的状态的结构图。
[0042]
除了物体检测部10以外,实施方式12的结构与实施方式1、实施方式2和实施方式11的结构相同,不同点在于,物体检测部10由多个rf模块电路12、一个信号处理电路13和一个以上的雷达控制电路11构成。如图14所示,rf模块电路12在本车辆x的前方设置三处、在后方设置两处。此外,垂直测角功能控制部20搭载在本车辆x的内部,雷达控制电路11可以搭载在本车辆x的内部,也可以搭载在与rf模块电路12相同的部位。另外,其它部分与垂直测角功能控制部20同样地搭载在本车辆x的内部。
[0043]
由此,通过消除所有rf模块电路12同时谋求最大性能的情况,从而即使处理性能比多个物体检测部10中各个信号处理电路13所谋求的处理性能的总和要低,也能实现同等的功能。
[0044]
另外,在实施方式1至实施方式12中,对使用雷达的情况进行了说明,但如果是雷达或lidar(light detection and ranging:光探测和测距)那样的具备垂直测角功能、且能使进行垂直测角的距离范围、距离精度、速度范围、速度精度、角度范围、角度精度中的至少任一个变更的传感器,则都能适用。另外,特别是在雷达中,较多采用通过公知的波束成形法或超分辨率测角、单脉冲测角来计算垂直方位的结构,因此,通过限制进行垂直测角的范围而得到的处理负荷降低的效果较大。
[0045]
此外,物体检测部10、垂直测角功能控制部20和环境信息获取部30的硬件结构的一个示例如图15中所示那样,由处理器200和存储装置201构成。虽然存储装置未图示,但具备随机存取储存器等易失性存储装置、和闪存等非易失性的辅助存储装置。此外,也可以具备硬盘这样的辅助存储装置以代替闪存。处理器200执行从存储装置201输入的程序。该情况下,程序从辅助存储装置经由易失性存储装置被输入到处理器200。另外,处理器200可以将运算结果等数据输出至存储装置201的易失性存储装置,也可以经由易失性存储装置将数据保存至辅助存储装置。作为物体检测部的结构要素,记载了rf模块电路、雷达控制电路、信号处理电路,但它们无需收纳在一个壳体内。例如,可以将进行信号处理电路的一部分或全部处理的电路搭载于其它壳体(信号处理ecu(electronic control unit:电子控制单元)),该其它壳体搭载在与rf模块电路不同的部位。
[0046]
虽然本技术记载了各种示例性实施方式和实施例,但是在一个或多个实施方式中记载的各种特征、方式和功能不限于特定实施方式的应用,可以单独地或以各种组合来应用于实施方式。因此,可以认为未例示的无数变形例也包含在本技术说明书所公开的技术范围内。例如,设为包括对至少一个构成要素进行变形、添加或省略的情况,以及提取至少一个构成要素并与其他实施方式的构成要素进行组合的情况。标号说明
[0047]
10 物体检测部,11 雷达控制电路,12 rf模块电路,13 信号处理电路,20 垂直测角功能控制部,30 环境信息获取部,100 物体检测装置,200 处理器,201 存储装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1