视觉检查系统的自动对焦功能的制作方法
1.本文的主题总体上涉及视觉检查系统。
背景技术:
2.检查系统用于在制造过程中检查零件。传统的检查系统需要人员在零件沿着输送机移动时手动检查零件。从输送机上移除有缺陷的零件。这种手动检查系统需要强度劳动并且成本高。手动检查系统的检测精度低,导致产品一致性差。另外,手动检查系统由于疲劳而遭受人为错误,例如遗漏的缺陷、错误的计数、零件的错放等等。
3.一些已知的检查系统使用机器视觉来检查零件。机器视觉检查系统使用相机对零件成像。处理图像以检测零件的缺陷。捕获质量图像对于机器学习期间检查和培训过程中的分析非常重要。图像质量可能会受到成像设备与零件之间距离的影响。
4.仍然需要一种可以以成本有效且可靠的方式操作的视觉检查系统。
技术实现要素:
5.在一个实施例中,提供了一种视觉检查系统,包括:平台,在检查区域处支撑用于进行检查的零件;检查站,在检查区域处与平台相邻定位,包括将平台上的零件成像的成像设备;以及视觉检查控制器,从成像设备接收图像。视觉检查控制器包括用于使成像设备相对于检查区域取向的自动聚焦模块。自动聚焦模块确定成像设备距检查区域的工作距离。自动聚焦模块计算距检查区域的各个工作距离处的图像的像素值的图像对比度分数。视觉检查控制器使检查站在这样的成像工作距离处操作成像设备:该成像工作距离对应于与最高图像对比度分数相关联的工作距离。
6.在一个实施例中,提供了一种视觉成像系统,包括:平台,在检查区域处支撑用于进行检查的零件;检查站,与平台相邻定位,包括用于在上表面上方的视场中对零件成像的成像设备;和视觉检查控制器,从成像设备接收图像。视觉检查控制器包括用于使成像设备相对于检查区域取向的自动聚焦模块。自动聚焦模块包括:被配置为将成像设备移动到距检查区域第一工作距离的一个或多个处理器;被配置为在第一工作距离处捕获第一图像的一个或多个处理器;被配置为计算第一图像的像素值的第一图像对比度分数的一个或多个处理器。自动聚焦模块包括:被配置为将成像设备移动到距检查区域第二工作距离的一个或多个处理器;被配置为在第二工作距离处捕获第二图像的一个或多个处理器;被配置为计算第二图像的像素值的第二图像对比度分数的一个或多个处理器。自动聚焦模块包括被配置为比较第一图像对比度分数和第二图像对比度分数以确定哪个具有较高的图像对比度分数的一个或多个处理器。检查站在等于与较高图像对比度分数相关联的工作距离的成像工作距离处操作成像设备,以对零件成像。
7.在一个实施例中,提供了一种检查零件的方法,包括:将成像设备从检查区域移动到第一工作距离;在第一工作距离处捕获第一图像;以及计算第一图像的像素值的第一图像对比度分数。该方法包括将成像设备从检查区域移至第二工作距离;以第二工作距离捕
获第二图像;以及计算第二图像的像素值的第二图像对比度分数。该方法包括比较第一图像对比度分数和第二图像对比度分数以确定哪个具有较高的图像对比度分数值。该方法包括在等于与较高图像对比度分数值相关联的工作距离的成像工作距离处来操作成像设备以对零件成像。
附图说明
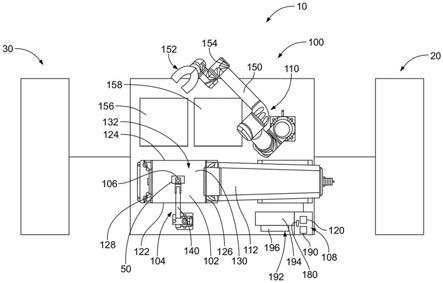
8.图1是用于制造零件50的机器10的示意图,零件50诸如电连接器中使用的零件。
9.图2是视觉检查系统100的一部分的侧视图,示出了相对于平台102上的零件50的成像设备106。
10.图3是视觉检查系统100的一部分的侧视图,示出了相对于平台102上的零件50的成像设备106。
11.图4是视觉检查系统100的一部分的侧视图,示出了相对于平台102上的零件50的成像设备106。
12.图5是根据示例性实施例的检查零件50的方法的流程图。
13.图6是示出根据示例性实施例的在各种工作距离处的图像清晰度的图。
14.图7是示出根据示例性实施例的在各种工作距离处的图像清晰度的图。
具体实施方式
15.图1是用于制造零件50的机器10的示意图,零件50诸如电连接器中使用的零件。例如,零件50可以是触头、壳体、电路板或其他类型的零件。机器10可以用于制造在其他行业中使用的零件。机器10包括用于形成各种零件50的一个或多个成型机20。例如,成型机20可以包括模制机、压力机、车床等。机器10包括用于检查各个零件50的视觉检查系统100。机器10包括用于处理各个零件50的一个或多个处理机30。例如,处理机30可以包括组装机、包装机等。例如,在各个实施例中,零件50可以在包装(例如在包装站处)之前被组装(例如在组装站处)。零件50在成形机20和视觉检查系统100之间运输。视觉检查系统100用于零件50的质量检查,并去除有缺陷的零件以报废或进行进一步检查。已经通过视觉检查系统100的检查的合格零件50在视觉检查系统100和处理机30之间运输。
16.视觉检查系统100包括平台102,该平台通过视觉检查系统100支撑零件50。零件50可以在平台102上分类。例如,有缺陷的零件和/或合格零件可以从平台102移除,并被放置在垃圾箱或容器中,或者被移至另一个站,例如移至处理机30。平台102可用于通过视觉检查系统100进给或移动零件50。在各种实施例中,平台102可以支撑零件而无需固定件,这增加了通过视觉检查系统100的零件50的吞吐量。
17.视觉检查系统100包括检查站104,该检查站具有一个或多个成像设备106,成像设备106对位于检查区域(例如平台102的上表面)处的、在(一个或多个)成像设备106的视场内的平台102上的零件50成像。视觉检查系统100包括视觉检查控制器108,其从成像设备106接收图像并处理图像。例如,视觉检查控制器108可以用于确定检查结果。视觉检查控制器108确定每个零件50是否通过或未通过检查。视觉检查控制器108可以拒绝有缺陷的零件50。在示例性实施例中,视觉检查控制器108包括人工智能(ai)学习模块,该人工智能学习模块用于基于从成像设备106接收的图像来更新图像分析。视觉检查控制器108可以在视觉
检查系统100的操作期间被实时地更新和训练。
18.在示例性实施例中,视觉检查控制器108包括用于使成像设备相对于检查区域取向的自动聚焦模块120。自动聚焦模块120确定成像设备106距检查区域的成像工作距离,以实现增强的图像。例如,自动聚焦模块120确定在检查区域内提供零件50的最清晰图像的工作距离。自动聚焦模块120可以在校准过程期间通过以下被训练:在各个工作距离处成像,处理每个图像,以及选择与和最清晰图像相关联的工作距离相对应的操作工作距离。在示例性实施例中,自动聚焦模块120计算在各个工作距离处的图像的像素值的图像对比度分数,以确定与最高图像对比度分数相关联的工作距离。较高的图像对比度对应于具有像素值的较高过渡的图像。像素值的较高过渡是清晰、高质量图像的典型特征。具有较高过渡度和较高图像对比度分数的图像是较清晰的图像。具有较低过渡和较低图像对比度分数的图像是模糊图像。在示例性实施例中,可以自动执行校准过程以确定成像设备106的最佳工作距离。
19.视觉检查系统100包括用于基于检查结果对零件50进行分类的分类设备110。例如,分类设备110可以将合格零件与有缺陷的零件分开。分类设备110可以是多轴机器人操纵器,其被配置为从平台102上抓取并拣走零件。在其他各个实施例中,分类设备110可以包括被配置为将合格和/或有缺陷的零件推出平台102的推动器或排出器。
20.在示例性实施例中,视觉检查系统100可以用于检查不同类型的零件50。例如,视觉检查系统100可以用于检查不同尺寸的零件,不同形状的零件,不同取向的零件等。可以针对不同类型的零件50中的每一类型校准自动聚焦模块120,以确定不同类型的零件50的不同工作距离。
21.在示例性实施例中,视觉检查系统100包括零件进给设备112。零件50由零件进给设备112装载到平台102上,零件进给设备112可以包括料斗、输送机或另一种进给设备。零件50被呈现给平台102上的检查站104。零件50可以沿着平台102前进或进给或通过检查站104,以进行对零件50的检查。零件50被分类设备110从平台102移除。零件50可以被引导到平台102的特定位置,例如,在平台102的第一侧面122和第二侧面124之间靠近平台102的中心。零件50可以被装载到平台102上,例如靠近平台102的后部126,并且可以由平台102或在平台102上朝向平台102的前部128向前推进。在替代实施例中,可以提供其他类型的零件进给设备112。平台102包括具有用于支撑零件50的上表面132的板130。板130可以是振动托盘,该振动托盘振动以使零件50从后部126朝向前部128前进。板130可以是矩形的。然而,在替代实施例中,板130可以具有其他形状。
22.成像设备106相对于零件50的检查区域定位,以查看零件50并对其成像。例如,成像设备106可以位于上表面132上方,并且观察布置在上表面132上的检查区域(例如,在成像设备106的正下方)的零件50。成像设备106可以位于其他位置,例如沿着板130的侧面,在通过板130观察时在板130下方(例如,使用透明板)或在另一位置。可选地,可以使用多个成像设备106从不同侧面观察零件50或用于观察板130的不同区域。成像设备106可以是相机,例如可见光相机。成像设备106的视场可以大致位于平台102的第一侧面122和第二侧面124之间的中心。成像设备106的视场可以大致位于平台102的后部126和前部128之间的中心。成像设备106在检查区域上方的成像距离影响图像质量。例如,如果成像设备106太靠近检查区域,则图像可能不清楚。如果成像设备106距离检查区域太远,则图像可能不清楚。当成
像设备106位于适当的成像距离处时,图像清楚。在示例性实施例中,视觉检查控制器的自动聚焦模块120用于确定成像设备106的适当成像距离,以实现增强的清晰图像。
23.在示例性实施例中,成像设备106被安装到位置操纵器140,以用于相对于平台102移动成像设备106。位置操纵器140可以是支撑成像设备106的臂或支架。在各种实施例中,位置操纵器140可在多个方向上定位,例如在二维或三维空间中。位置操纵器140可以被自动调节,例如由控制电动致动器以定位位置操纵器140和成像设备106的控制器自动调节。位置操纵器162可以由诸如ai控制模块的另一控制模块被调节。位置操纵器162可以安装到机器10的框架,例如从平台102下方、平台102上方、在平台102外部的位置处或从平台102的开口(如果存在)内部。位置操纵器162可以由机器10周围的其他结构支撑。在其他各个实施例中,位置操纵器140可以被手动调节。可以基于被成像的零件50的类型来调节(一个或多个)成像设备106的位置。例如,当不同类型的零件50被成像时,可以基于被成像的零件的类型来移动成像设备106。自动聚焦模块120可以基于被成像的零件的类型来确定适当的成像距离。
24.分类设备110邻近平台102定位。分类设备110可以用于基于来自成像设备106的输入将可合格零件与有缺陷的零件分离。基于成像设备106定位于距检查区域适当的工作距离处,使用高质量的高对比度图像检查零件50。高对比度图像用于使用ai学习模块训练视觉检查控制器108。在示例性实施例中,分类设备110包括机械手150和在机械手150的远端154处的抓取器152。在各个实施例中,机械臂150是四轴机械臂或六轴机械臂。在替代实施例中可以使用其他类型的机械臂150。零件50由抓取器152从平台102上拣走。操作分类设备110以从平台102移除零件50,例如合格零件和/或有缺陷的零件。零件50可以移动到收集箱,例如用于合格零件的第一收集箱156和用于有缺陷零件的第二收集箱158。在各个实施例中,操作分类设备110以移除所有零件并将每个零件放置在对应的收集箱156、158中。在其他各个实施例中,分类设备110被操作为随着零件50沿进给方向前进,仅将合格零件移至第一收集箱156,而留下有缺陷的零件以掉落到第二收集箱158(位于平台102的前部128)中。在其他各个实施例中,分类设备110被操作为随着零件50沿进给方向前进,仅将有缺陷的零件移至第二收集箱158,而留下合格零件以掉落到第一收集箱156(位于平台102的前部128)中。在替代实施例中可以使用其他类型的零件移除设备,例如推动器、排出器等。
25.视觉检查控制器108可操作地联接到成像设备106和分类设备110,以控制分类设备110的操作。成像设备106通过机器视觉软件与视觉检查控制器108通信,以处理数据、分析结果、记录发现并基于该信息做出决定。视觉检查控制器108提供一致且有效的检查自动化。视觉检查控制器108确定零件50的制造质量,例如确定零件50是合格的还是有缺陷的。视觉检查控制器108识别零件中的缺陷(如果存在)。视觉检查控制器108的自动聚焦模块120确定成像设备106的适当成像距离。视觉检查控制器108基于所识别的零件50的取向来控制分类设备110的操作。
26.视觉检查控制器108从成像设备106接收图像,并且处理图像以确定检查结果。在示例性实施例中,视觉检查控制器108包括用于处理图像的一个或多个处理器180。视觉检查控制器108确定每个零件50是否通过或未通过检查。视觉检查控制器108控制分类设备110以将诸如合格零件和/或有缺陷的零件之类的零件50移入收集箱156、158中。一旦接收到图像,就基于图像分析模型对图像进行处理。将图像与图像分析模型进行比较以确定零
件50是否具有任何缺陷。图像分析模型可以是定义被成像的零件的基线结构的三维模型。在其他各种实施例中,图像分析模型可以是一系列二维模型,例如针对每个成像设备106。图像分析模型可以基于已知或质量合格的零件的图像,例如在学习或训练期间。图像分析模型可以基于零件50的设计规范。例如,图像分析模型可以包括零件的边缘、表面和特征的设计参数。图像分析模型可以包括参数的公差因子,从而允许在公差因子之内进行补偿。在处理期间,可以对图像进行单独处理,也可以将其合并为零件的数字模型,然后将该数字模型与图像分析模型进行比较。基于图像分析模型对图像进行处理以检测缺陷,例如充填不足缺陷,闪光缺陷,黑点,污垢,凹痕,划痕或其他类型的缺陷。可以通过基于图像分析模型执行图像的图案识别以将图像中的图案或特征与图像分析模型中的图案或特征进行比较来处理图像。可以通过执行在图像中检测到的边界和表面的特征提取并将边界和表面与图像分析模型进行比较来处理图像。视觉检查控制器108可以识别图像内的线、边缘、桥、凹槽或其他边界或表面。视觉检查控制器108可以在处理期间执行图像的对比度增强和/或降噪。视觉检查控制器108可以识别图像内的感兴趣区域以用于增强处理。视觉检查控制器108可以在处理期间执行图像分割。
27.在示例性实施例中,视觉检查控制器108包括人工智能(ai)学习模块190。ai学习模块190使用人工智能来训练视觉检查控制器108并提高视觉检查控制器108的检查精度。例如通过将成像设备106定位在适当的工作距离处提供高质量图像,改善了ai学习模块190的训练和学习。ai学习模块190基于从成像设备106接收到的图像来更新图像分析模型。例如,图像分析模型可以由ai学习模块190定制和配置。可以使用ai学习模块190基于成像设备106拍摄的图像来修改或更新形成图像分析模型基础的图像。例如,图像分析模型可以基于多个图像,其基于来自ai学习模块190的图像被更新或扩展。随着ai学习模块扩展图像分析模型,可以提高图像处理的质量。视觉检查控制器108在视觉检查系统100的操作期间被实时地更新和训练。视觉检查控制器108的ai学习模块190可以在学习模式下操作以训练视觉检查控制器108并开发图像分析模型。图像分析模型基于来自ai学习模块190的输入(例如,基于成像设备106拍摄的零件50的图像)随时间变化。ai学习模块190可以用于更新自动聚焦模块120。在替代实施例中,ai学习模块190可以是与视觉检查控制器108分离的模块,其可独立于视觉检查控制器108操作。例如,ai学习模块190可以单独地联接至成像设备106或机器10的其他部件。
28.在示例性实施例中,视觉检查控制器108包括用户界面192。用户界面192包括显示器194,例如监视器。用户界面192包括一个或多个输入196,诸如键盘、鼠标、按钮等。操作员能够通过用户界面192与视觉检查控制器108进行交互。
29.图2是视觉检查系统100的一部分的侧视图,示出了相对于平台102上的零件50的成像设备106。示出了成像设备106处于第一工作距离200处。成像设备106可操作地联接到视觉检查控制器108。视觉检查控制器108从成像设备106接收图像并且处理图像。自动聚焦模块120用于通过计算在第一工作距离200处的图像的像素值的图像对比度分数来确定图像的清晰度。
30.图3是视觉检查系统100的一部分的侧视图,示出了相对于平台102上的零件50的成像设备106。示出了成像设备106处于第二工作距离202处。成像设备106可操作地联接到视觉检查控制器108。视觉检查控制器108从成像设备106接收图像并且处理图像。自动聚焦
模块120用于通过计算第二工作距离202处的图像的像素值的图像对比度分数来确定图像的清晰度。
31.图4是视觉检查系统100的一部分的侧视图,示出了相对于平台102上的零件50的成像设备106。成像设备106被示为处于第三工作距离204。成像设备106可操作地联接到视觉检查控制器108。视觉检查控制器108从成像设备106接收图像并且处理图像。自动聚焦模块120用于通过计算第三工作距离204处的图像的像素值的图像对比度分数来确定图像的清晰度。
32.参考图2-4,视觉检查控制器108可在校准模式下操作,以基于在各种工作距离200、202、204处的图像的清晰度来确定成像设备106的适当成像距离。视觉检查控制器108使用自动聚焦模块120来确定适当的成像距离。在示例性实施例中,自动聚焦模块120包括:被配置为将成像设备106移动到距检查区域210第一工作距离200(图2)的一个或多个处理器;被配置为在第一工作距离200处捕获第一图像的一个或多个处理器;被配置为计算第一图像的像素值的第一图像对比度分数的一个或多个处理器。自动聚焦模块120包括:被配置为将成像设备106移动到距检查区域210第二工作距离202(图3)的一个或多个处理器;被配置为在第二工作距离202处捕获第二图像的一个或多个处理器;被配置为计算第二图像的像素值的第二图像对比度分数的一个或多个处理器。自动聚焦模块120包括:被配置为将成像设备106移动到距检查区域210第三工作距离204(图4)的一个或多个处理器;被配置为在第三工作距离204处捕获第三图像的一个或多个处理器;被配置为计算第三图像的像素值的第三图像对比度分数的一个或多个处理器。
33.在示例性实施例中,成像设备106可以捕获彩色图像,诸如使用红色/绿色/蓝色(rgb)加法原色模型。自动聚焦模块120可以包括被配置为将rgb图像转换成灰度图像的一个或多个处理器。可以基于灰度图像来计算图像对比度分数。在示例性实施例中,自动聚焦模块120可以通过计算图像的像素值之间的绝对差来计算图像对比度分数。自动聚焦模块120可以通过计算图像的像素值的平方差之和(ssd)来计算图像对比度分数。像素值可以是像素值的矩阵,例如具有以下值的像素值的3
×
3矩阵:
[0034][0035]
自动聚焦模块120可以使用以下公式计算ssd:
[0036]
(a
n,m-b
n,m+1
)2+(b
n,m+1-c
n,m+2
)2+(d
n+1,m-e
n+1,m+1
)2+
[0037]
(e
n+1,m+1-f
n+1,m+2
)2+(g
n+2,m-h
n+2,m+1
)2+(h
n+2,m+1-i
n+2,m+2
)2。
[0038]
自动聚焦模块120包括被配置为比较图像对比度分数以确定哪个具有较高的图像对比度分数的一个或多个处理器。视觉检查控制器108将输出提供到例如显示器194和/或位置操纵器140,以使成像设备106在等于与更高图像对比度分数相关联的工作距离的成像工作距离处操作以对零件50成像。ai学习模块190可以用于更新自动聚焦模块120。例如,由ai学习模块192处理的图像被用于更新自动聚焦模块120。
[0039]
图5是根据示例性实施例的检查零件50的方法的流程图。该方法在500处包括将成像设备106定位在距检查区域第一工作距离(wd1)处。该方法在502处包括捕获第一rgb图像
(m
×
n
×
3)。第一rgb图像包括m行
×
n列矩阵,具有红色、绿色和蓝色值。rgb图像是真彩色矩阵,其中前两个索引(m,n)是像素的坐标,而第三个索引是颜色分量。例如,(m,n,1)是红色像素值,(m,n,2)是绿色,(m,n,3)是蓝色分量。该方法在504处包括:将第一rgb图像转换为第一灰度图像(m
×
n
×
1,其中,前两个索引(m,n)是像素的坐标,第三个索引代表范围从黑色到白色的单色或灰度强度分量)。灰度图像具有像素值的矩阵(m
×
n)。该方法在506处包括计算在第一工作距离处的第一灰度图像的像素值的第一图像对比度分数。可以通过计算图像的像素值之间的绝对差来计算图像对比度分数。可以通过计算图像的像素值的平方差之和(ssd)来计算图像对比度分数。确定第一图像对比度分数后,系统触发新的成像位置。
[0040]
该方法在510处包括将成像设备106定位在距检查区域第二工作距离(wd2)处。第二工作距离wd2定位在距第一工作距离(wd1+s)的间距(s)处。该方法在512处包括捕获第二rgb图像(m
×
n
×
3)。rgb图像具有红色像素值的矩阵(m
×
n),绿色像素值的矩阵(m
×
n)和蓝色像素值的矩阵(m
×
n)。该方法在514处包括将第二rgb图像转换为第二灰度图像(m
×
n
×
1)。灰度图像具有像素值的矩阵(m
×
n),例如像素值的3
×
3矩阵。该方法在516处包括计算第二工作距离wd2处的第二灰度图像的像素值的第二图像对比度分数。可以通过计算图像的像素值之间的绝对差来计算第二图像对比度分数。可以通过计算图像的像素值的ssd来计算第二图像对比度分数。在确定第二图像对比度分数之后,系统触发新的成像位置。
[0041]
该方法在520处包括将成像设备106定位在距检查区域第三工作距离wd3处。第三工作距离定位在距第二工作距离wd2(wd2+s或wd1+s+s)的间距(s)处。距检查区域的第三工作距离wd3位于第一工作距离1s和从第二工作距离到第三工作距离的另一间距1s(例如1s+1s=2s)。在替代实施例中,间隔可以不同。在522,该方法包括捕获第三rgb图像(m
×
n
×
3)。rgb图像具有红色像素值的矩阵(m
×
n),绿色像素值的矩阵(m
×
n)和蓝色像素值的矩阵(m
×
n)。该方法在524处包括将第三rgb图像转换为第三灰度图像(m
×
n
×
1)。灰度图像具有像素值的矩阵(m
×
n),例如像素值的3
×
3矩阵。该方法在526处包括计算在第三工作距离wd3处的第三灰度图像的像素值的第三图像对比度分数。可以通过计算图像的像素值之间的绝对差来计算第三图像对比度分数。可以通过计算图像的像素值的ssd来计算第三图像对比度分数。在确定第三图像对比度分数之后,系统触发新的成像位置。
[0042]
该方法在530处包括将成像设备106定位在距检查区域第n工作距离wd4处。第n工作距离位于超出第三工作距离第n个间距(s)的任何距离处。wd4可以是距第三工作距离wd3的间距s或任何其他间距(例如2s,3s或间隔s的其他倍)。该方法在532处包括捕获第n个rgb图像(m
×
n
×
3)。rgb图像具有红色像素值的矩阵(m
×
n),绿色像素值的矩阵(m
×
n)和蓝色像素值的矩阵(m
×
n)。该方法在534处包括将第n个rgb图像转换为第n个灰度图像(m
×
n
×
1)。灰度图像具有像素值的矩阵(m
×
n),例如像素值的3
×
3矩阵。该方法在536处包括计算在第n工作距离处的第n个灰度图像的像素值的第n图像对比度分数。可以通过计算图像的像素值之间的绝对差来计算第n图像对比度分数。可以通过计算图像的像素值的ssd来计算第n图像对比度分数。
[0043]
该方法在540处包括比较图像对比度分数以确定哪个具有较高的图像对比度分数值。该方法在542处包括在等于与较高图像对比度分数值相关联的工作距离的成像工作距离处操作成像设备106以对零件50成像。
[0044]
图6是示出根据示例性实施例的在各种工作距离处的图像清晰度的图。视觉检查
控制器108执行自动聚焦处理以确定成像设备106的成像工作距离。在所示的实施例中,以五个工作距离(wd1,wd2,wd3,wd4,wd5)捕获图像。视觉检查控制器108被配置为计算在每个图像工作距离处的图像对比度分数。在所示的实施例中,图像对比度分数被归一化。视觉检查控制器108确定哪个图像对比度分数具有最高图像对比度分数值,在所示出的实施例中,与第二工作距离(wd2)相关联的图像对比度分数最高。视觉检查控制器108输出与具有最高图像对比度分数的工作距离相对应的成像工作距离。视觉检查控制器108使成像设备106在与最高图像对比度分数值即wd2相关联的工作距离处进行操作。例如,视觉检查控制器108调整位置操纵器140(图1)以将成像设备106定位在第二工作距离wd2处。控制器108可以操作对诸如一个或多个伺服马达的电动致动器的控制,以控制成像设备106的位置。位置操纵器162可以由诸如ai控制模块的另一控制模块被调节。
[0045]
图7是示出根据示例性实施例的在各种工作距离处的图像清晰度的图。视觉检查控制器108执行自动聚焦处理以确定成像设备106的成像工作距离。在所示的实施例中,以五个工作距离(wd1,wd2,wd3,wd4,wd5)捕获图像。视觉检查控制器108被配置为计算在每个图像工作距离处的图像对比度分数。在所示的实施例中,图像对比度分数被归一化。视觉检查控制器108确定哪个图像对比度分数具有最高图像对比度分数值,在所示出的实施例中,与第五工作距离(wd5)相关联的图像对比度分数最高。视觉检查控制器108输出与具有最高图像对比度分数的工作距离相对应的成像工作距离。视觉检查控制器108使成像设备106在与最高图像对比度分数值即wd5相关联的工作距离处进行操作。在各种实施例中,由于最后的成像位置对应于最高图像对比度分数,因此视觉检查控制器108可以继续执行自动聚焦过程,以确定是否比wd5更远的工作距离具有更高的图像对比度分数。视觉检查控制器108可以基于成像的工作距离来调节位置操纵器140(图1)以将成像设备106定位在适当的工作距离处。控制器108可以操作对诸如一个或多个伺服马达的电动致动器的控制,以控制成像设备106的位置。位置操纵器162可以由诸如ai控制模块的另一控制模块被调节。在各种实施例中,如果第六工作距离处的图像具有较低的图像对比度分数,则视觉检查控制器108已经确定了与最高图像对比度分数相对应的工作距离。例如,这种曲线可以是多项式图,例如具有局部最大值的二次曲线(例如,抛物线)。视觉检查控制器108比较每个工作距离处的图像,以调节位置操纵器140以将成像设备106定位在适当的工作距离处。
[0046]
应当理解,以上描述意在说明而不是限制。例如,上述实施例(和/或其方面)可以彼此组合使用。另外,在不脱离本发明范围的情况下,可以做出许多修改以使特定情况或材料适应本发明的教导。本文描述的尺寸、材料类型、各种部件的取向以及各种部件的数量和位置旨在定义某些实施例的参数,而绝不是限制性的,而仅仅是示例性实施例。在阅读以上描述之后,在权利要求的精神和范围内的许多其他实施例和修改对于本领域普通技术人员将是显而易见的。因此,本发明的范围应该参考所附权利要求以及这些权利要求所赋予的等同物的全部范围来确定。在所附权利要求中,术语“包括”和“其中”被用作相应术语“包含”和“在...中”的等效词。此外,在以下权利要求中,术语“第一”,“第二”和“第三”等仅用作标签,并且并非旨在对其对象施加数字要求。此外,以下权利要求的限制不是以装置加功能的格式书写的,也并非旨在基于35u.s.c.
§
112(f)被解释,除非并且直到这样的权利要求限制明确地使用短语“用于
……
的装置”,后接没有进一步结构的功能描述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1