飞行载具及应用其的方向侦测方法与流程
1.本公开是有关于一种载具及应用其的方向侦测方法,且特别是有关于一种飞行载具及应用其的方向侦测方法。
背景技术:
2.习知飞行载具通常会包含摄像器,其可撷取飞行载具前方的环境影像。飞行载具通过分析环境影像可判断飞行载具与周遭环境的关系,如是否朝向目标飞行或是否撞击到障碍物等。然而,当飞行载具所处环境的亮度愈低,所撷取的环境影像愈不清晰,导致判断结果失准。因此,如何提出一种能改善前述习知问题的技术是本技术领域业者努力的目标之一。
3.公开内容
4.本公开有关于一种飞行载具及应用其的方向侦测方法,可改善前述习知问题。
5.本公开一方面的实施例提出一种飞行载具。飞行载具包括本体、第一测距装置、第二测距装置及控制器。第一测距装置配置在本体,且用以侦测第一测距装置与反射体之间的第一距离。第二测距装置配置在本体,且用以侦测第二测距装置与反射体之间的第二距离。控制器依据第一距离与第二距离,取得本体的方向与反射体之间的角度。
6.本公开另一方面的实施例提出一种方向侦测方法。方向侦测方法包括以下步骤。飞行载具的第一测距装置侦测第一测距装置与反射体之间的第一距离;飞行载具的第二测距装置侦测第二测距装置与反射体之间的第二距离;以及,飞行载具的控制器依据第一距离与第二距离,取得飞行载具的本体的方向与反射体之间的角度。
7.为了对本公开之上述及其他方面有更佳的了解,下文特举实施例,并配合所附图式详细说明如下:
附图说明
8.图1a绘示本公开一实施例的飞行载具的示意图。
9.图1b绘示从图1a的飞行载具的尾部观看飞行载具及反射体的示意图。
10.图1c绘示图1a的飞行载具相对反射体的几何关系图。
11.图2a绘示本公开另一实施例的飞行载具的示意图。
12.图2b绘示从图2a的飞行载具的尾部观看飞行载具及反射体的示意图。
13.图2c绘示图2a的飞行载具相对反射体的几何关系图。
14.图3a绘示依照本公开另一实施例的飞行载具的示意图。
15.图3b绘示图3a的飞行载具所测得的角度与时间的关系图。
16.图4绘示图3a的飞行载具所测得的第一距离与第二距离的距离差值与时间的关系图。
17.图5绘示图1a的飞行载具的方向侦测方法的流程图。
18.附图标记说明
19.100、200、300:飞行载具
20.110:本体
21.120:第一测距装置
22.120s:第一信号发射面
23.130:第二测距装置
24.130s:第二信号发射面
25.140:控制器
26.350:角速度侦测器
27.a1,a1p:角度
28.a1’,a1”:夹角
29.az1:纵轴
30.abc,abc,a’o1c’:三角形
31.b1:反射体
32.d1:方向
33.h1:第一距离
34.h2:第二距离
35.n1:第一法线方向
36.n2:第二法线方向
37.p1:第一参考面
38.p2:第二参考面
39.s1:第一侦测信号
40.s1’:第一反射信号
41.s2:第二侦测信号
42.s2’:第二反射信号
43.s110~s130:步骤
44.o1:交点
45.δt1,δt2:时间区间
46.δh、δhp:距离差值
47.l:距离
48.α1:第一夹角
49.α2:第二夹角
50.α3:第三夹角
51.夹角
52.夹角
具体实施方式
53.为使本公开的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本公开进一步详细说明。
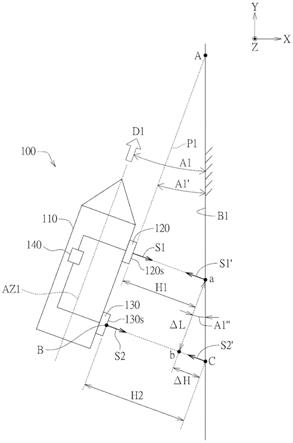
54.请参照图1a及图1b,图1a绘示本公开一实施例的飞行载具100的示意图,图1b绘示
从图1a的飞行载具100的尾部观看飞行载具100及反射体b1的示意图,而图1c绘示图1a的飞行载具100相对反射体b1的几何关系图。飞行载具100例如是无人机,或者是可载人或载物的航空器。
55.如图1a所示,飞行载具100包括本体110、第一测距装置120、第二测距装置130及控制器140。第一测距装置120配置在本体110且用以侦测第一测距装置120与反射体b1之间的第一距离h1。第二测距装置130配置在本体110且用以侦测第二测距装置130与反射体b1之间的第二距离h2。控制器140依据第一距离h1与第二距离h2,取得方向d1与反射体b1之间的角度a1。如此,飞行载具100可依据取得的角度a1调整航道。此外,在飞行过程中,飞行载具100可持续(随时间的推进)取得最新角度a1,以持续调整航道。
56.本公开实施例的“方向”指的是飞行载具100的朝向,如沿纵轴az1的方向,且依据飞行载具100的种类及/或飞行特性而定,“方向”例如是飞行方向,如朝前飞行或朝后飞行,然本公开实施例不受此限。本公开实施例的“角度a1”指的是飞行载具100的飞行方向与反射体b1之间的角度,例如,当飞行载具100朝前飞行时,角度a1为头向角度,为头向与反射体b1之间的角度;当飞行载具100朝后飞行时,角度a1为尾向角度,为尾部朝向与反射体b1之间的角度
57.在一种应用中,飞行载具100的控制器140可依据角度a1判断方向d1是否朝向目标(未绘示),当方向d1非朝向目标时,飞行载具100修正航道,使方向d1朝向该目标。在另一种应用中,飞行载具100的控制器140可依据角度a1及所侦测的第一距离h1、第二距离h2及角度a1,判断本体110与反射体b1是否处于安全距离。例如,当飞行载具100所侦测的第一距离h1与第二距离h2之一者(如最小者)小于安全距离值且角度a1小于安全角度值时,飞行载具100的控制器140判断本体110与反射体b1非处于安全距离,据以修正航道,使本体110与反射体b1保持安全距离。综上,本公开实施例的飞行载具100可依据所侦测的第一距离h1及第二距离h2朝向目标飞行且在飞行过程与周遭反射体保持安全距离。
58.如图1a及图1b所示,第一测距装置120可发出第一侦测信号s1,第一侦测信号s1自反射体b1反射后成为第一反射信号s1’,第一反射信号s1’由第一测距装置120所接收。第二测距装置130可发出第二侦测信号s2,第二侦测信号s2自反射体b1反射后成为第二反射信号s2’,第二反射信号s2’由第二测距装置130所接收。在一实施例中,控制器140可对第一侦测信号s1及第一反射信号s1’进行运算而取得第一距离h1,且可对第二侦测信号s2及第二反射信号s2’进行运算而取得第二距离h2。在另一实施例中,第一测距装置120可依据第一侦测信号s1及第一反射信号s1’独立运算出第一距离h1,而第二测距装置130可依据第二侦测信号s2及第二反射信号s2’独立运算出第二距离h2。只要飞行载具100可取得第一距离h1及第二距离h2即可,本公开实施例不限定取得的技术手段。
59.如图1a所示,以沿方向d1(例如朝向纵轴az1的前端)来说,第一测距装置120位于第二测距装置130的前方。在实施例中,第一测距装置120及第二测距装置130例如是飞时(time of flight,tof)测距装置、声纳测距装置或其它的测距装置。由于第一测距装置120及第二测距装置130采用信号发射式测距装置,飞行载具100可运作于低亮度的环境中,如隧道(如图1b所示)内、地下室、夜晚等低亮度或甚至是黑暗环境中。此外,反射体b1例如是环境的物体,如墙壁、障碍物、建筑物、生物等。例如,以隧道来说,反射体b1的内壁面为圆柱面且可沿直线规律延伸。然本公开实施例不限定反射体b1的种类、表面轮廓及/或延伸方式
等。
60.如图1a所示,本体110具有纵轴(longitudinal axis)az1、第一参考面p1及第二参考面p2。纵轴az1例如是本体110的中心轴,然本公开实施例不受此限。方向d1与纵轴az1平行,例如是大致上重合,而第一参考面p1与第二参考面p2大致上垂直。图式中的xy平面例如是垂直于第一参考面p1且平行于第二参考面p2,而z轴向例如是垂直于xy平面。在本实施例中,第一测距装置120及第二测距装置130例如是共面配置。举例来说,第一测距装置120具有第一信号发射面120s,第二测距装置130具有第二信号发射面130s,其中第一信号发射面120s与第二信号发射面130s共面,如共同重叠于第一参考面p1。在另一实施例中,第一信号发射面120s与第二信号发射面130s也可沿垂直于第一参考面p1的方向错开。
61.在本实施例中,如图1b所示,第二参考面p2的延伸通过第一信号发射面120s、第二信号发射面130s及纵轴az1,如此所测得的第一距离h1及第二距离h2位于与方向d1相同的基准面(如图1b之第二参考面p2)上,使依据第一距离h1及第二距离h2所取得的角度值更接近本体110的实际角度a1。此外,第一参考面p1与方向d1大致上平行,如此使第一参考面p1与反射体b1之间的夹角a1’等同于方向d1与反射体b1之间的角度a1。
62.如图1a所示,第二距离h2、第一参考面p1、夹角a1’与反射体b1构成直角三角形abc,直角三角形abc的第一参考面p1与反射体b1之间包含夹角a1’。如图1a与图1c所示,第一测距装置120与第二测距装置130之间沿纵轴az1的距离δl及第一距离h1与第二距离h2的距离差值δh构成一直角三角形abc,直角三角形abc包含夹角a1”,其中直角三角形abc为直角三角形abc的近似三角形,因此夹角a1”等于夹角a1’。如此,只要取得夹角a1”,即取得角度a1。夹角a1”可依据下式(1)取得。
63.a1=a1
′
=a1
″
=tan-1
(δh/δl)......(1)
64.请参照图2a~图2c,图2a绘示本公开另一实施例之飞行载具200的示意图,图2b绘示从图2a的飞行载具200的尾部观看飞行载具200及反射体b1的示意图,而图2c绘示图2a的飞行载具200相对反射体b1的几何关系图。飞行载具200包括本体110、第一测距装置120、第二测距装置130及控制器140。本公开实施例的飞行载具200具有与前述飞行载具100相同或相似的技术特征,差异处在于,飞行载具200的第一测距装置120及第二测距装置130的配置方式不同。
65.如图2a所示,本体110具有纵轴az1、第一参考面p1及第二参考面p2,其中方向d1与纵轴az1平行,例如是大致上重合,而第一参考面p1与第二参考面p2大致上垂直。在本实施例中,如图2b所示,第二参考面p2的延伸大致上通过第一信号发射面120s、第二信号发射面130s及纵轴az1,使所测得的第一距离h1及第二距离h2位于与方向d1相同的基准面(如图2b的第二参考面p2)上,如此依据第一距离h1及第二距离h2所取得的角度值更接近本体110的实际角度a1。
66.如图2a及图2b所示,第一测距装置120的第一信号发射面120s的第一法线方向n1(第一法线方向n1例如大致平行第一侦测信号s1的发射方向)与第二测距装置130的第二信号发射面130s的第二法线方向n2(第二法线方向n2例如大致平行第二侦测信号s2的发射方向)交会于交点o1。第一参考面p1通过交点o1且大致平行于方向d1,如此使第一参考面p1与反射体b1之间的夹角a1’等同于方向d1与反射体b1之间的角度a1。
67.在本实施例中,第一信号发射面120s及第二信号发射面130s非共面配置。例如,如
图2a及图2c所示,第一信号发射面120s的第一法线方向n1与第二信号发射面130s的第二法线方向n2之间具有第一夹角α1,第一夹角α1例如是非0度或非180度,即第一信号发射面120s与第二信号发射面130s非共平面。在一实施例中,第一夹角α1例如是90度,即第一信号发射面120s与第二信号发射面130s垂直配置。
68.如图2a及图2c所示,第一参考面p1、反射体b1、交点o1与第二距离h2构成三角形a’o1c’,其中三角形a’o1c’非直角三角形。三角形a’o1c’的第一参考面p1与反射体b1之间包含夹角a1’。由于第一参考面p1通过交点o1且大致平行于方向d1,因此夹角a1’等于角度a1。换言之,只要取得夹角a1’,即取得角度a1。夹角a1’可采下式(2)~(4)取得。
[0069][0070][0071][0072]
式(2)~(4)中,请同时参考图2c,第二夹角α2表示第一信号发射面120s的第一法线方向n1与第一参考面p1(或方向d1)之间的夹角,第三夹角α3表示第二信号发射面130s的第二法线方向n2与第一参考面p1(或方向d1)之间的夹角,第一夹角α1可区分成夹角α11及夹角α12,等于第二发射面130s至交点o1之间的距离与第二距离h2的和,而等于第一发射面120s至交点o1之间的距离与第一距离h1的和。在一实施例中,夹角α11、夹角α12、第二夹角α2及第三夹角α3皆为45度,然此非用以限制本公开实施例。此外,第二夹角α2及第三夹角α3可随方向d1与反射体b1的角度a1改变而变化。本公开实施例不限定夹角α11及夹角α12个别的数值,只要便于控制器140快速计算出角度a1即可。在一实施例中,夹角α11与第二夹角α2的和为常数,如90度,而夹角α12与第三夹角α3的和为常数,如90度,然本公开实施例不受此限。
[0073]
请参照图3a,图3a绘示依照本公开另一实施例的飞行载具300的示意图,而图3b绘示图3a的飞行载具200所测得的角度a1与时间的关系图。飞行载具300包括本体110、第一测距装置120、第二测距装置130、控制器140及角速度侦测器350。飞行载具300具有与前述飞行载具100相同或相似的技术特征,差异处在于,飞行载具300更包括角速度侦测器350。角速度侦测器350用以侦测本体110的角速度。角速度侦测器350例如是陀螺仪、加速度侦测器等。在另一实施例中,本体110的角速度可由控制本体飞行的控制装置(未绘示)反馈给控制器140,在此设计下,飞行载具300可选择性省略角速度侦测器350。
[0074]
本公开实施例的飞行载具300可过滤异常的角度,避免此异常的角度负面影响飞行载具300的航道。详言之,如图3a所示,当反射体b1具有不规则或突然变化的结构,如凹部b11时,飞行载具300所取得的角度a1的数值会突然变化,如突升(如图3b所示)或突降。然此数值突变的角度仅能表示反射体b1的局部变化,并不能代表反射体b1的整体改变,因此飞行载具300可忽略此突变的角度a1p。
[0075]
具体的处理方式例如是:控制器140更用以:(1)判断时间区间δt1内数个角度a1中是否有数值突变的角度a1p;(2)判断本体110的角速度是否改变;(3)当数值突变的角度a1p存在且本体110的角速度未改变,滤除(即,忽略或不考虑)此突变的角度a1p。如此,可避免此数值突变的角度a1p导致飞行载具300发生航道误判而进行修正错误的航道修正。在一
实施例中,角度a1p的数值与先前一段时间(如时间区间δt2)内数个角度a1的平均值之间的差值(可取绝对值)与该平均值的比例例如是高于预设值(predetermined threshold)。换言之,当控制器140有取得符合前述比例的角度a1时,即判定该角度a1为数值突变的角度a1p。
[0076]
请参照图4,其绘示图3a的飞行载具300所测得的第一距离h1与第二距离h2的距离差值δh与时间的关系图。飞行载具300包括本体110、第一测距装置120、第二测距装置130、控制器140及角速度侦测器350。角速度侦测器350用以侦测本体110的角速度。在本公开实施例中,控制器140更用以:(1)取得一时间区间δt1内数个第一距离h1与数个第二距离h2的数个距离差值δh;(2)判断此些距离差值δh是否具有数值突变的距离差值δhp;(3)判断本体110的角速度是否改变;(4)当此些距离差值δh具有数值突变的距离差值δhp且本体110的角速度未改变,滤除(即,忽略或不考虑)数值突变的距离差值δhp。如此,可避免此数值突变的距离差值δhp导致飞行载具300发生航道误判而进行修正错误的航道修正。在一实施例中,数值突变的距离差值δhp与先前一段时间(如时间区间δt2)内数个距离差值δh的一平均值的差值(可取绝对值)与该平均值的比例例如是高于预设值(predetermined threshold)。换言之,当控制器140有取得符合前述比例的距离差值δh时,即判断该距离差值δh为数值突变的距离差值δhp。
[0077]
请参照图5,其绘示图1a的飞行载具100的方向侦测方法的流程图。在步骤s110中,飞行载具100的第一测距装置120侦测该第一测距装置120与反射体b1之间的第一距离h1。在步骤s120中,飞行载具100的第二测距装置130侦测该第二测距装置130与反射体b1之间的第二距离h2。在步骤s130中,飞行载具100的控制器140依据第一距离h1与第二距离h2,取得飞行载具100的本体110的方向d1与反射体b1之间的角度a1,例如,头向角度。角度a1的具体取得方法的数个实施例已于前述,容此不再赘述。此外,飞行载具200及300的方向侦测方法也可采用类似方法,容此不再赘述。
[0078]
以上所述的具体实施例,对本公开的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本公开的具体实施例而已,并不用于限制本公开,凡在本公开的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1