一种激光探测装置的制作方法
1.本发明涉及光学技术领域,更具体地,涉及一种激光探测装置。
背景技术:
2.目前,测量距离和位移的传感器可使用三角测量法,其原理是使用一组镜头将激光准直成小光斑(直径小于毫米),照射被测物体,然后使用成像镜头将物体反射的激光成像到线阵ccd(charge coupled device,电荷耦合器件)、cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)上,通过反射光斑在成像单元上移动的像素多少,推算出位移和距离信息。
3.该技术缺点很突出,包括但不限于:
4.1.受限于ccd和cmos尺寸,动态范围较小(mm量级);
5.2.随距离变大之后,精度会变差,即成像点在成像单元上移动的距离减小;
6.3.对光路装调难度要求很高,尤其是激光准直和成像要求都很高;
7.4.要求性能优越的线性ccd或cmos器件。
8.对此,相关技术中提出了适用于较大动态范围的脉冲测距技术,原理是测量光脉冲从发射,经目标发射收集脉冲能量,通过测量光脉冲的飞行时间进行距离测量,能够在一定程度上弥补三角测量法的缺陷,然而,该技术虽然结构简单,是目前激光中距离测距的重要方法,但其缺点也同样明显,比如,需要峰值功率极高的光脉冲,难以满足人眼安全;抗干扰能力差,相同波长的激光测距在视场内很难避免其他激光雷达的干扰串扰。显然,这些缺点都对测距测速的精确性产生负面影响。
9.因此,如何更高精度地测距测速,成为目前亟待解决的技术问题,
技术实现要素:
10.鉴于上述问题,本发明提出了一种激光探测装置,其针对相关技术中测距测速精确度较低的技术问题,使用电流调谐波长的方法进行测量,具有抗干扰能力强、光路简单、功耗小等特点,可在大动态范围内实现高精度的测距测速。
11.第一方面,本发明实施例提供了一种激光探测装置,包括:线性连续波生成电路、驱动电路、具有谐振腔的半导体激光器、准直透镜、电压放大电路、滤波电路、ad采样电路和处理器;所述线性连续波生成电路用于根据原始波信号产生线性连续波电压信号;所述驱动电路用于将所述线性连续波生成电路产生的线性连续波电压信号转换为线性连续波电流信号,并利用所述线性连续波电流信号调谐驱动所述半导体激光器发射的激光探测信号的频率;所述半导体激光器用于在所述驱动电路的驱动下通过所述谐振腔的前端发射激光探测信号,并通过所述谐振腔的前端接收所述激光探测信号的回波信号,通过所述谐振腔对所述回波信号进行混频后输出给所述电压放大电路;所述准直透镜位于所述半导体激光器的前端,用于准直所述激光探测信号;所述电压放大电路用于对混频后的回波信号进行电压放大处理;所述滤波电路用于对经电压放大处理的回波信号进行滤波处理;所述ad采
样电路用于对经滤波处理的回波信号进行模数转换,得到回波采样信号;所述处理器用于向所述线性连续波生成电路输出所述原始波信号,还用于根据所述回波采样信号确定待探测目标的速度和/或距离。
12.在本发明上述实施例中,可选地,所述线性连续波生成电路包括:数字隔离模块,用于实现所述处理器与运放积分模块之间的电气隔离,并放大所述原始波信号,其中,所述原始波信号为方波信号;运放积分模块,用于对经放大的原始波信号进行积分运算,从而生成所述线性连续波电压信号,所述线性连续波电压信号为三角波电压信号。
13.在本发明上述实施例中,可选地,所述驱动电路包括运算放大电路和作为电流源的npn型三极管;所述运算放大电路的正输入端与所述线性连续波生成电路的输出端连接,且通过第一电阻r31连接至外设电源,并通过串接的第二电阻r34和第三电阻r35接地;所述运算放大电路的负输入端与所述npn型三极管的发射极连接,还通过第四电阻r36接地;所述运算放大电路的输出端与所述npn型三极管的基极连接;所述npn型三极管的集电极通过第五电阻r32与二极管d1的负极连接;其中,所述第一电阻、所述第二电阻和所述第四电阻为阻值可调电阻;所述第一电阻r31、第二电阻r34、第三电阻r35、第四电阻r36之间满足如下关系:
[0014][0015]
其中,i
th
为电流阈值,v
cc
为所述外接电源的电压值。
[0016]
在本发明上述实施例中,可选地,所述电压放大电路包括跨阻放大电路、主放大电路和三级放大电路,所述半导体激光器输出的回波信号经所述跨阻放大电路处理后进入所述主放大电路的负输入端。
[0017]
在本发明上述实施例中,可选地,所述准直透镜为非球面透镜。
[0018]
在本发明上述实施例中,可选地,所述处理器为fpga。
[0019]
在本发明上述实施例中,可选地,还包括:环境温度控制模块,临近于所述半导体激光器设置。
[0020]
在本发明上述实施例中,可选地,所述激光探测装置包括多个所述半导体激光器,所述半导体激光器为单模分布式反馈半导体激光器。
[0021]
在本发明上述实施例中,可选地,多个所述半导体激光器呈阵列排列,每个所述半导体激光器对应一个准直透镜。
[0022]
在本发明上述实施例中,可选地,多个所述半导体激光器发射的激光探测信号位于同一平面;所述激光探测装置还包括位于多个所述半导体激光器的探测范围内的扫描部件,所述扫描部件用于接收所述激光探测信号,并向所述处理器发送回波信号。
[0023]
以上技术方案,针对相关技术中测距测速精确度较低的技术问题,提供了一种激光探测装置,线性连续波生成电路、驱动电路、具有谐振腔的半导体激光器、准直透镜、电压放大电路、滤波电路、ad采样电路和处理器。在本发明的一种实现方式中,半导体激光器可以集成有光电探测器的功能,则半导体激光器在自混频干涉测量过程中可同时充当光源、光电探测器、空间光滤波器、光放大器,从而简化电路器件。而在本发明的另一种实现方式中,也可以根据实际需要为半导体激光器额外配置光电探测器。与传统的测量方法相比,半导体激光器的自混频干涉有着相同的相位灵敏度,非常适合应用于非合作目标的位移振动
和绝对距离等物理量的测量。
[0024]
半导体激光器在驱动电路的驱动下通过谐振腔的前端发射激光探测信号,激光探测信号经过准直透镜准直后照射目标,目标的一部分反射光重新耦合到半导体激光器中,半导体激光器即通过所述谐振腔的前端接收所述激光探测信号的回波信号,同时半导体激光器的频率随着注入电流进行调制,对所述回波信号进行混频后输出给所述电压放大电路,从而产生了外差干涉频率,在原有三角波调制的光强变化上存在着微小的拍频信号。如果将三角波直接滤波放大,跨阻放大器很容易工作在非线性状态,故将调制信号从电压放大电路的负输入端引入,消除原有三角波调制光强的变化,再经过电压放大电路中的跨阻放大电路将拍频光电流信号转换为电压信号,并经过主放大电路和三级放大电路放大电压信号,将拍频信号放大。
[0025]
由此,再对放大后的电压信号和放大后的拍频信号进行滤波和模数转换处理,得到回波采样信号,处理器可根据所述回波采样信号确定待探测目标的速度和/或距离。同时,处理器可向所述线性连续波生成电路输出所述原始波信号,也就是方波,再将方波输入到三角波电路,经三角波电路进行数字隔离和运放积分后,生成三角波,再将三角波输入驱动电路。
[0026]
为确保半导体激光器导通,驱动电路中的驱动电流应大于指定电流阈值,则为实现半导体激光器导通,可对驱动电路中的电阻大小进行调节,实现电流的改变,从而通过改变注入电流的方式实现激光频率调谐,确保调频的线性度。
[0027]
通过以上技术方案,利用半导体激光器的自混频效应,设计简单的激光探测装置实现调频连续波激光干涉测距测速,并通过改变注入电流的方式实现激光频率调谐,提升了测距测速装置的抗干扰能力,降低了其功耗,与传统测量方法相比适用范围更广。
附图说明
[0028]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0029]
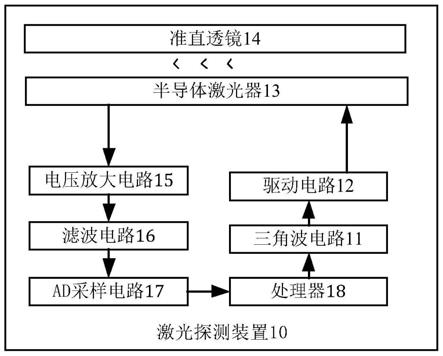
图1示出了根据本发明一个实施例的激光探测装置的框图。
[0030]
图2示出了图1中电压放大电路的电路图。
[0031]
图3示出了图1中三角波电路的电路图。
[0032]
图4示出了图1中驱动电路的电路图。
[0033]
图5示出了根据本发明一个实施例的频率随注入电流调谐的非线性关系示意图。
[0034]
图6示出了根据本发明一个实施例的三角波调制和拍频信号放大的对比示意图。
[0035]
图7示出了根据本发明一个实施例的多波束扫描图。
[0036]
图8示出了根据本发明一个实施例的多激光器阵列示意图。
具体实施方式
[0037]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
[0038]
在本发明的说明书和权利要求书及上述附图中的描述的一些流程中,包含了按照特定顺序出现的多个操作,但是应该清楚了解,这些操作可以不按照其在本文中出现的顺序来执行或并行执行,操作的序号如101、102等,仅仅是用于区分开各个不同的操作,序号本身不代表任何的执行顺序。另外,这些流程可以包括更多或更少的操作,并且这些操作可以按顺序执行或并行执行。需要说明的是,本文中的“第一”、“第二”等描述,是用于区分不同的消息、设备、模块等,不代表先后顺序,也不限定“第一”和“第二”是不同的类型。
[0039]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0040]
图1示出了根据本发明一个实施例的激光探测装置的框图。
[0041]
如图1所示,激光探测装置10包括:线性连续波生成电路11、驱动电路12、具有谐振腔的半导体激光器13、准直透镜14、电压放大电路15、滤波电路16、ad采样电路17和处理器18;所述线性连续波生成电路11用于根据原始波信号产生线性连续波电压信号;所述驱动电路12用于将所述线性连续波生成电路11产生的线性连续波电压信号转换为线性连续波电流信号,并利用所述线性连续波电流信号调谐驱动所述半导体激光器13发射的激光探测信号的频率;所述半导体激光器13用于在所述驱动电路12的驱动下通过所述谐振腔的前端发射激光探测信号,并通过所述谐振腔的前端接收所述激光探测信号的回波信号,通过所述谐振腔对所述回波信号进行混频后输出给所述电压放大电路15;所述准直透镜14位于所述半导体激光器13的前端,用于准直所述激光探测信号;所述电压放大电路15用于对混频后的回波信号进行电压放大处理;所述滤波电路16用于对经电压放大处理的回波信号进行滤波处理;所述ad采样电路17用于对经滤波处理的回波信号进行模数转换,得到回波采样信号;所述处理器18用于向所述线性连续波生成电路11输出所述原始波信号,还用于根据所述回波采样信号确定待探测目标的速度和/或距离。其中,准直透镜14包括但不限于非球面透镜。
[0042]
在本发明的一种实现方式中,半导体激光器13可以集成有光电探测器的功能,则半导体激光器13在自混频干涉测量过程中可同时充当光源、光电探测器、空间光滤波器、光放大器,从而简化电路器件。而在本发明的另一种实现方式中,也可以根据实际需要为半导体激光器13额外配置光电探测器。与传统的测量方法相比,半导体激光器13的自混频干涉有着相同的相位灵敏度,非常适合应用于非合作目标的位移振动和绝对距离等物理量的测量。
[0043]
半导体激光器13在驱动电路12的驱动下通过谐振腔的前端发射激光探测信号,激光探测信号经过准直透镜14准直后照射目标,目标的一部分反射光重新耦合到半导体激光器13中,半导体激光器13即通过所述谐振腔的前端接收所述激光探测信号的回波信号,同时半导体激光器13的频率随着注入电流进行调制,对所述回波信号进行混频后输出给所述电压放大电路15,从而产生了外差干涉频率,在原有三角波调制的光强变化上存在着微小的拍频信号。如果将三角波直接滤波放大,跨阻放大器很容易工作在非线性状态,故将调制信号从电压放大电路15的负输入端引入,消除原有三角波调制光强的变化,再经过电压放大电路15中的跨阻放大电路将拍频光电流信号转换为电压信号,并经过主放大电路和三级
放大电路放大电压信号,将拍频信号放大。
[0044]
由此,再对放大后的电压信号和放大后的拍频信号进行滤波和模数转换处理,得到回波采样信号,处理器18可根据所述回波采样信号确定待探测目标的速度和/或距离。同时,处理器18可向所述线性连续波生成电路11输出所述原始波信号,也就是方波,再将方波输入到三角波电路,经三角波电路进行数字隔离和运放积分后,生成三角波,再将三角波输入驱动电路12。
[0045]
为确保半导体激光器13导通,驱动电路12中的驱动电流应大于指定电流阈值,则为实现半导体激光器13导通,可对驱动电路12中的电阻大小进行调节,实现电流的改变,从而通过改变注入电流的方式实现激光频率调谐,确保调频的线性度。
[0046]
通过以上技术方案,利用半导体激光器13的自混频效应,设计简单的激光探测装置实现调频连续波激光干涉测距测速,并通过改变注入电流的方式实现激光频率调谐,提升了测距测速装置的抗干扰能力,降低了其功耗,与传统测量方法相比适用范围更广。
[0047]
下面结合多个附图对激光探测装置10进行详细的描述。
[0048]
如图2所示,电压放大电路15包括跨阻放大电路、主放大电路和三级放大电路,所述半导体激光器13输出的回波信号经所述跨阻放大电路处理后进入所述主放大电路的负输入端。如果将三角波直接滤波放大,跨阻放大电路很容易工作在非线性状态,故将调制信号从负输入端引入,消除原有三角波调制光强的变化。
[0049]
主放大电路包括mcp6021芯片,通过mcp6021芯片的正输入端接收半导体激光器13102的调制电压,并接地,mcp6021芯片的负输入端接外设电源vcc,同时,在mcp6021芯片的负输入端与外设电源vcc之间,通过并联的电容c10和电容c11接地,电容c10可选为0.1μf,电容c11可选为0.01μf。并且,mcp6021芯片的负输入端连接至mcp6021芯片的输出端,mcp6021芯片的输出端依次连接有电容c12、可调电阻r18、可调电阻r19和跨阻放大电路,其中,r18的最大值可选为20kω,r19的最大值可选为10kω。
[0050]
跨阻放大电路中采用opa380芯片,opa380芯片是跨阻放大器,输入是电流,输出是电压,主要应用在电流转电压的场合,其偏置电流非常小,噪声也非常小,所以常用来对非常微弱的电流作iv变换。opa380芯片的负输入端与输出端之间设置有并联的电阻r15与电容c18,r15可选为27kω,c18可选为5.6pf,opa380芯片的负输入端还接外设电源vcc,同时,在opa380芯片的负输入端与外设电源vcc之间,通过并联的电容c16和电容c17接地,电容c17可选为0.1μf,电容c16可选为0.01μf。opa380芯片的正输入端连接有外设电源vdd,两者间通过串联的电阻r50和电阻r51接地,电阻r51并联有电容c41,电阻r50和电阻r51均可选为1.5kω,电容c41可选为10nf,另外,opa380芯片的正输入端可直接接地。
[0051]
跨阻放大电路的opa380芯片负输入端还连接至三级放大电路,三级放大电路包括三极管q1,三极管q1的发射极通过二极管d2连接至外设电源vcc,同时,通过电阻r14接地,三极管q1的基极通过电阻r16接地,电阻r16并联有电容c15,三极管q1的集电极经第一节点连接并联的电阻r9和r10至外设电源vcc,第一节点还连接至电阻r16的输入端,且第一节点通过串联的电阻r12和电容c13连接至跨阻放大电路的opa380芯片负输入端。
[0052]
半导体激光器13在驱动电路12的驱动下通过谐振腔的前端发射激光探测信号,激光探测信号经过准直透镜14准直后照射目标,目标的一部分反射光重新耦合到半导体激光器13中,半导体激光器13即通过所述谐振腔的前端接收所述激光探测信号的回波信号,同
时半导体激光器13的频率随着注入电流进行调制,对所述回波信号进行混频后输出给所述电压放大电路15,从而产生了外差干涉频率,在原有三角波调制的光强变化上存在着微小的拍频信号。如果将三角波直接滤波放大,跨阻放大器很容易工作在非线性状态,故将调制信号从电压放大电路15的负输入端引入,消除原有三角波调制光强的变化,再经过电压放大电路15中的跨阻放大电路将拍频光电流信号转换为电压信号,并经过主放大电路和三级放大电路放大电压信号,将拍频信号放大。
[0053]
具体来说,可经过跨阻运算放大电路将拍频光电流信号转换为电压信号,并经过主放大电路和三级放大电路放大电压信号,将拍频信号放大到1.5v以上。为了提高提高信噪比,使用滤波电路16的二阶低通滤波器进行滤波,并将拍频信号经过ad采样电路17的高速模数转换ad9461进行采样,采样率达到130mhz,并使用spi(serial peripheral interface,串行外围设备接口)协议将数据传输至fpga电路1068。fpga电路1068内嵌快速傅里叶变换算法,将拍频的频率结算处理,从而获得距离和速度信息。
[0054]
如图3所示,处理器18为fpga,fpga可进行快速傅里叶变换处理后,生成方波,方波进入线性连续波生成电路11,线性连续波生成电路11包括:数字隔离模块,用于实现所述处理器18与运放积分模块之间的电气隔离,并放大所述原始波信号,其中,所述原始波信号为方波信号;运放积分模块,用于对经放大的原始波信号进行积分运算,从而生成所述线性连续波电压信号,所述线性连续波电压信号为三角波电压信号。
[0055]
具体来说,数字隔离模块具有数字隔离芯片,数字隔离芯片的ena引脚连接至外设电源,外设电源可选为+5v,且ena引脚还分别通过电容c2和电容c3接地,数字隔离芯片的outa引脚和vdd引脚也连接至外设电源,并连接有串联的r7、c4、r8至运放积分模块的运算放大器的负输入端,其中,c4和r8之间通过电容c5接地。
[0056]
运放积分模块的运算放大器通过正输入端经并联的电容c1和电阻r3接地,通过电阻r4接外设电源,且运放积分模块的运算放大器还通过vdd引脚接外设电源,vdd引脚还分别通过电容c9和电容c8分别接地。运放积分模块的运算放大器通过vss引脚接地,运放积分模块的运算放大器的输出端通过电容c6连接至驱动电路12。另外,运放积分模块的运算放大器的负输入端和输出端之间设置有电阻r11,以及与电阻r11并联的阻值可调电阻rp2和与阻值可调电阻rp2串联的电阻c7。
[0057]
fpga产生40khz的方波,占空比50%,并使用数字隔离模块将方波放大并起到隔离作用,方波经过电容电阻以及运算放大器构成的运放积分模块,可以将方波转换成三角波信号,并且三角波的上升沿和下降沿可以通过改变电阻电容的值来改变上升时间和每个时刻的斜率。
[0058]
如图4所示,三角波信号(即调制信号)进入驱动电路12,经过电压跟随器,通过三极管进行电压电流转换。
[0059]
驱动电路12包括运算放大电路和作为电流源的npn型三极管;所述运算放大电路的正输入端与所述线性连续波生成电路11的输出端连接,且通过第一电阻r31连接至外设电源,并通过串接的第二电阻r34和第三电阻r35接地;所述运算放大电路的负输入端与所述npn型三极管的发射极连接,还通过第四电阻r36接地;所述运算放大电路的输出端与所述npn型三极管的基极连接;所述npn型三极管的集电极通过第五电阻r32与二极管d1的负极连接;其中,所述第一电阻、所述第二电阻和所述第四电阻为阻值可调电阻;所述第一电
阻r31、第二电阻r34、第三电阻r35、第四电阻r36之间满足如下关系:
[0060][0061]
其中,i
th
为电流阈值,v
cc
为所述外接电源的电压值。
[0062]
具体来说,驱动电路12通过r
31
连接至外设电源vcc,并通过r
34
以及r
36
接地,其中,r
31
和r
34
以及r
36
为阻值可调电阻。作为运算放大器的mcp6001芯片,其正输入端连接至r
31
与r
34
之间的节点,mcp6001芯片的负输入端通过r
36
接地,mcp6001芯片的vdd引脚连接至外设电源vcc,mcp6001芯片的输出端连接至三极管q3的基极,三极管q3的发射极通过r
36
接地,三极管q3的集电极通过电阻r
32
和二极管d1连接至外设电源vcc。
[0063]
根据运算放大器虚短虚地的原则,则运放积分模块中运算放大器的正负输入端电压为:
[0064][0065]
使用三极管q3也就是npn三极管作为电流源,可以将电压信号转换为电流信号,半导体激光器13的电流值为:
[0066][0067]
半导体激光器13导通状态下,有导通压降vld,导通压降一般为1—1.4v,并且npn三极管的导通压降为vce。另外,为了方便电源管理,外设电源的电压一般取+5v,所以施加在r36的最大电压为:
[0068][0069]
同时,要确保半导体激光器13102导通,驱动电流应大于阈值ith,运算放大器正输入的电阻满足以下关系:
[0070][0071]
激光探测装置10还包括环境温度控制模块,环境温度控制模块临近于所述半导体激光器13设置。使用三角波调制半导体激光器13,波长随着注入电流和温度发生改变,其中电流调谐速度较快,而温度调谐的时间尺度是在ms量级。将温度控制,使用驱动电流产生频率改变,但是半导体激光器13的频率随注入电流并非线性,而是存在高阶项,如图5所示。在使用环境温度控制模块对半导体激光器13进行恒温控制,并且使用积分电路拟合该非线性,获得调频的高线性度。
[0072]
如图6所示,将拟合的类三角波对半导体激光器13进行调制,半导体激光器13随着调制信号发生光强变化,同时也发生了线性调频,频率调谐量与注入电流的峰值正相关,通常为0.01-0.1nm/ma,如果将电流峰峰值设为10ma,则调谐量在10-10ghz。使用光电探测器或半导体激光器13的探测功能进行观测,通过跨阻运算放大器、主放大器和三级放大器,可以获得清晰的拍频信号。将拍频信号通过高速模数转换器进行数字采样,数字采样率最少满足奈奎斯特采样率,即采样率带宽是拍频信号的两倍,而调制斜率和测程决定了拍频带
宽。测程越远,需要的带宽越大,对模数转换器的采样率提出较高要求。如果选择40khz的调制频率,调制带宽为10ghz,测程10m以内,最少需要120mhz的采样率。经过模数转换之后的拍频信号通过fpga的fft内核进行频率估计,再将共模频率转换为距离值,将差模频率转换为速度值,完成距离速度的同时测量。
[0073]
在本发明的一种实现方中,所述激光探测装置包括多个所述半导体激光器,所述半导体激光器13为单模分布式反馈半导体激光器。
[0074]
多个所述半导体激光器13呈阵列排列,每个所述半导体激光器13对应一个准直透镜14。
[0075]
多个所述半导体激光器13发射的激光探测信号位于同一平面;所述激光探测装置还包括位于多个所述半导体激光器13的探测范围内的扫描部件,所述扫描部件用于接收所述激光探测信号,并向所述处理器18发送回波信号。其中,由于单模分布式反馈半导体激光器有天然的抗干扰能力,故可以使用多束激光与扫描部件进行同步扫描。
[0076]
具体来说,如图7所示,3束激光束a、b和c在一个平面内,准直发散角可以根据扫描部件的尺寸继续调整,使1/e2的光束能量能经过扫描部件反射,每个光束可以照射在扫描部件的相同位置,所以可以配合面积小mems扫描镜使用,单模分布式反馈半导体激光器a的光经过目标反射,主要耦合进入单模分布式反馈半导体激光器a中,但是也会进入单模分布式反馈半导体激光器b和c中,但是不同单模分布式反馈半导体激光器的初相位不同,并且调制方式也可以改变,所以难以在其他单模分布式反馈半导体激光器中形成干涉。该应用可以使用小面积的扫描器件,同时完成扫描而不受各个模块的干扰,极大提高了成像速度和帧频。
[0077]
因此,可采用单独的单模分布式反馈半导体激光器和单独的光电探测器,也可采用呈阵列排列的多个单模分布式反馈半导体激光器,其中,所述光电探测器与所述单模分布式反馈半导体激光器数量相同,每个所述单模分布式反馈半导体激光器的激光发射位置设置有透镜。整个激光器阵列使用垂直腔面,同时驱动发光,并使用微透镜阵列进行准直。
[0078]
如图8所示,将9个分布式反馈半导体激光器排成3*3阵列,可以完成一个面型的抽点检测,在面型检测和位姿检测有很强的应用前景。
[0079]
需要知晓,所述多个单模分布式反馈半导体激光器13共用线性连续波生成电路11、驱动电路12、电压放大电路15、滤波电路16、ad采样电路17和处理器18,以减少电路中的器件数量,降低生产成本,或者,每个所述单模分布式反馈半导体激光器13具有对应的一组线性连续波生成电路11、驱动电路12、电压放大电路15、滤波电路16、ad采样电路17和处理器18,以确保每个所述单模分布式反馈半导体激光器13的测量结果的精确度。
[0080]
通过以上技术方案,使用自混频干涉单光路实现干涉测量,并使用电流注入控制波长的方法实现激光频率的线性调制,拍频信号通过模数转换芯片进行采样,并使用嵌入式系统将拍频信号的频率成分进行分析,获得绝对距离和速度信息。
[0081]
本发明拟采用单光路的光路设计,使用单模的分布式反馈半导体激光器13,激光器发射特性是边发射,所以出射光斑远场是一个椭圆形的光斑,同时动态范围较大,需要在测程上时钟保持良好的光斑特性,特别使用非球面镜进行准直。单光路设计中,发射单元同时是接收单元,有效的扩大回波的通光比,即扩大激光出射光斑直径,增大镜头的数值孔径。
[0082]
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统,装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
[0083]
在本技术所提供的几个实施例中,应该理解到,所揭露的系统,装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
[0084]
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0085]
另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
[0086]
本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质可以包括:只读存储器(rom,read only memory)、随机存取存储器(ram,random access memory)、磁盘或光盘等。
[0087]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
[0088]
以上对本发明所提供的一种电子设备进行了详细介绍,对于本领域的一般技术人员,依据本发明实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1