转速传感器旋转方向识别装置及方法与流程
1.本发明涉及一种车辆中的转速传感器旋转方向识别技术,特别涉及用于识别转速传感器的旋转方向是正转还是反转的转速传感器旋转方向识别装置及方法。
背景技术:
2.目前转速传感器、尤其是电流式转速传感器已经被广泛应用在各种类型的汽车上,如何测量转速并识别转速传感器的旋转方向(正反转)显得尤为重要。特别是,变速箱控制单元(tcu)识别转速传感器正反转方面是保障自动挡汽车稳定换挡的重要技术。
3.专利文献1公开了一种转速信号采样处理电路,包括第一支路和第二支路;所述第一支路包括串联的三极管和钳位电阻,第二支路包括用于接入电流式转速传感器的接口和用于连接所述三极管、为所述三极管提供偏置电压的偏置电阻,所述接口和偏置电阻串联;所述三极管与钳位电阻之间的串联点连接该转速信号采样处理电路的输出端,该输出端用于连接一个检测该输出端信号频率的单片机。该转速信号采样处理电路将转速传感器输出的电流模拟量最终转化为高低电平信号,供单片机采样,实现转速的测量。
4.现有技术中还提出有一种用于识别电流式转速传感器的旋转方向的电路。图1中示出了现有技术中用于识别电流式转速传感器的旋转方向的电路图。该电路中,从电流式转速传感器输出的电流信号(传感器信号)经由下拉电阻r转换成电压信号,并通过由电阻r4、电容c4构成的滤波电路进行滤波,然后输入到比较器的负向输入端。另外,利用由电阻r1、r2、r3构成的电路对电源电压vcc进行分压,通过电阻r1、r2之间的连接点的电压来设定某一阈值电压并将其输入到比较器的正向输入端。比较器将分别输入到正向输入端和负向输入端的信号进行比较,弱正向输入端的信号比负向输入端大,则输出高电平,若正向输入端的信号比负向输入端小,则输出低电平。由于阈值电压和传感器信号的高低电平变化,比较器的输出信号也会呈现高低电平变化。控制部(cpu)根据比较器输出的脉冲波形的宽度差别,可以识别转速传感器的转动方向是正转还是反转。
5.图2中示出了转速传感器正转时输出的脉冲波形的宽度(正转脉宽)与反转时输出的脉冲波形的宽度(反转脉宽)的对比示意图。如图2所示,正转脉宽t
w(fwd)
比反转脉宽t
w(rev)
要窄,由此,根据输出的脉冲波形的宽度差别,可以识别转速传感器的转动方向是正转还是反转。
6.现有技术
7.专利文献1:中国专利cn109212252a
技术实现要素:
8.发明所要解决的技术问题
9.然而,上述现有的用于识别电流式转速传感器的旋转方向的电路可能会出现无法识别转速传感器的正反转的情况。
10.其中一种原因是电流式转速传感器正转时最大脉冲宽度大于反转时的最小脉冲
宽度,导致正反转脉冲宽度存在重叠现象。图3中示出了这种情况下的波形示意图。图3的上半部分示出电流式转速传感器正转时的情况,左侧为传感器信号的输入波形为最小(high supply current min和low supply current min)的情况,得到正转时最小脉冲宽度(正转tmin),右侧为传感器信号的输入波形为最大(high supply current max和low supply current max)的情况,得到正转时最大脉冲宽度(正转tmax)。图3的下半部分示出电流式转速传感器反转时的情况,左侧为传感器信号的输入波形为最小(high supply current min和low supply current min)的情况,得到反转时最小脉冲宽度(反转tmin),右侧为传感器信号的输入波形为最大(high supply current max和low supply current max)的情况,得到反转时最大脉冲宽度(反转tmax)。
11.图3中出现了正转时最大脉冲宽度大于反转时最小脉冲宽度(正转tmax>反转tmin)的现象,使得无法识别转速传感器的正反转。这主要是由于:通过由电阻r4、电容c4构成的滤波电路进行滤波,导致传感器信号有衰减,另一方面,输入的传感器信号(供应的电流信号input)的规格值范围较宽,而阈值电压只有一个,阈值电压在图3中圆圈所示出的位置会出现不合适的情况而造成较大误差。另外,正转、反转之间的规格时间间隔较窄、正转、反转的脉宽值规格范围过窄等因素也会导致这种情况的发生。
12.另一种原因是受干扰后导致误触发,使得无法识别转速传感器的正反转,且无法通过bci(bulk current injection:大电流注入)实验。根据抗扰度要求标准,有时会选择一定频率(例如0.1mhz)干扰进行最坏情况仿真。图4中示出进行0.1mhz干扰的情况下出现误触发的波形示意图。图4中,传感器信号的输入波形受到干扰呈现有杂波形式,杂波的波动导致会在阈值电压的高低电平上下波动。传感器信号的输入波形经过rc滤波后,其值高于阈值电压的高电平,比较器的输出信号output为低电平,传感器信号的输入波形经过rc滤波后,其值低于阈值电压的低电平,比较器的输出信号output为高电平。如果杂波的干扰使传感器信号的输入波形在阈值电压高低电平上下波动时,则会使比较器的输出信号output出现图4中圆圈所示的时高时低的现象,出现不能识别的错误,从而引起误触发。出现误触发主要是由于:由电阻r4、电容c4构成的滤波电路的滤波效果不好,杂波的幅度变化仍然较大,另一方面,阈值电压的上下限差值较小,无法起到防止误触发的现象。
13.本发明是为了解决上述课题而完成的,其目的在于提供一种通过对阈值电压信号进行补正,可提供不同的阈值电压信号,从而提高转速传感器的旋转方向的识别性能的转速传感器旋转方向识别装置及方法。
14.解决技术问题的技术方案
15.本发明涉及一种转速传感器旋转方向识别装置,用于识别转速传感器的旋转方向是正转还是反转,其特征在于,包括:滤波模块,该滤波模块对从所述转速传感器输出的传感器信号进行滤波;阈值设定模块,该阈值设定模块设定阈值电压信号;检测模块,该检测模块判断所述传感器信号是否正常;比较器,该比较器将由所述滤波模块滤波后的所述传感器信号与所述阈值电压信号进行比较;补正模块,该补正模块对所述阈值电压信号进行补正;及控制器,该控制器判断所述比较器输出的信号是否为脉冲波形,在所述比较器输出的信号为脉冲波形的情况下,根据所述脉冲波形的宽度来识别所述转速传感器的旋转方向是正转还是反转,在所述比较器输出的信号并非脉冲波形、且所述检测模块判断为所述传感器信号正常的情况下,控制所述补正模块对所述阈值电压信号进行补正。
16.优选地,转速传感器旋转方向识别装置中,所述转速传感器为电流式转速传感器,所述转速传感器旋转方向识别装置还包括电压转换模块,该电压转换模块将从所述电流式转速传感器输出的电流信号转换成电压信号并输出到所述滤波模块和所述检测模块。
17.优选地,转速传感器旋转方向识别装置中,所述电压转换模块由电容和一个以上的下拉电阻并联连接构成,所述电容及所述下拉电阻的一端接地。
18.优选地,转速传感器旋转方向识别装置中,所述滤波模块由串联连接的滤波电阻和滤波电容构成,所述滤波电阻与所述滤波电容之间的连接点连接到所述比较器的负向输入端。
19.优选地,转速传感器旋转方向识别装置中,所述检测模块由并联连接的检测电阻和检测电容构成,且所述检测电阻和所述检测电容的一端接地。
20.优选地,转速传感器旋转方向识别装置中,所述阈值设定模块由第1电阻、第2电阻及第3电阻构成,所述第1电阻的一端连接到电源电压,所述第1电阻的另一端连接到所述第2电阻的一端,所述第2电阻的另一端接地,所述第1电阻与所述第2电阻之间的连接点连接到所述比较器的正向输入端及所述第3电阻的一端,所述第3电阻的另一端连接到所述比较器的输出端。
21.优选地,转速传感器旋转方向识别装置中,所述补正模块由补正电阻和开关元件构成,所述补正电阻和所述开关元件串联连接后与所述第1电阻并联连接,所述控制器在控制所述补正模块进行补正时,使所述开关元件导通。
22.优选地,转速传感器旋转方向识别装置中,所述开关元件为mos管。
23.本发明还涉及一种转速传感器旋转方向识别方法,用于识别转速传感器的旋转方向是正转还是反转,其特征在于,包含:滤波步骤,该滤波步骤中,利用滤波模块对从所述转速传感器输出的传感器信号进行滤波;阈值设定步骤,该阈值设定步骤中,利用阈值设定模块设定阈值电压信号;检测步骤,该检测步骤中,利用检测模块判断所述传感器信号是否正常;比较步骤,该比较步骤中,利用比较器将由所述滤波模块滤波后的所述传感器信号与所述阈值电压信号进行比较;及控制步骤,该控制步骤中,利用控制器判断所述比较器输出的信号是否为脉冲波形,在所述比较器输出的信号为脉冲波形的情况下,根据所述脉冲波形的宽度来识别所述转速传感器的旋转方向是正转还是反转,在所述比较器输出的信号并非脉冲波形、且所述检测模块判断为所述传感器信号正常的情况下,控制补正模块对所述阈值电压信号进行补正。
24.优选地,在转速传感器旋转方向识别方法中,所述转速传感器为电流式转速传感器,所述转速传感器旋转方向识别方法还包含电压转换步骤,该电压转换步骤中,利用电压转换模块将从所述电流式转速传感器输出的电流信号转换成电压信号并输出到所述滤波模块和所述检测模块。
25.本发明还涉及一种存储介质,该存储介质存储有使计算机执行上述转速传感器旋转方向识别方法的程序。
26.发明效果
27.根据本发明的转速传感器旋转方向识别装置及方法,通过利用补正模块对阈值电压信号进行补正,可提供不同的阈值电压信号,从而提高转速传感器的旋转方向的识别性能。
附图说明
28.图1是现有技术中用于识别电流式转速传感器的旋转方向的电路图。
29.图2是转速传感器正转时输出的脉冲波形的宽度与反转时输出的脉冲波形的宽度的对比示意图。
30.图3是正转时最大脉冲宽度大于反转时的最小脉冲宽度的情况下的波形示意图。
31.图4是进行0.1mhz干扰的情况下出现误触发的波形示意图。
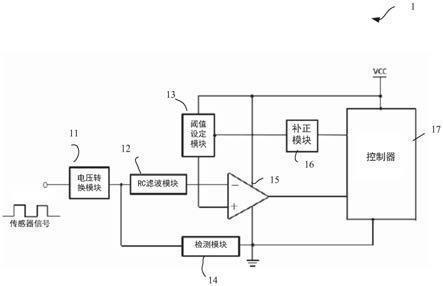
32.图5是表示本发明的实施方式所涉及的转速传感器旋转方向识别装置的结构框图。
33.图6是表示本发明的实施方式所涉及的转速传感器旋转方向识别装置的一个示例的电路图。
34.图7是应用本发明的实施方式所涉及的转速传感器旋转方向识别装置后得到的波形示意图。
35.图8是应用本发明的实施方式所涉及的转速传感器旋转方向识别装置后进行0.1mhz干扰的情况下的波形示意图。
36.图9是表示本发明的实施方式所涉及的转速传感器旋转方向识别方法的流程图。
37.图10是传感器信号的输入波形为最小的情况下计算阈值电压的示意图。
38.图11是传感器信号的输入波形为最大的情况下计算阈值电压的示意图。
具体实施方式
39.下面,为了更详细地说明本发明,根据附图对用于实施本发明的方式进行说明。
40.首先,利用图5,对本发明的实施方式所涉及的转速传感器旋转方向识别装置1的模块结构进行说明。
41.如图5所示,转速传感器旋转方向识别装置1包括电压转换模块11、滤波模块12、阈值设定模块13、检测模块14、比较器15、补正模块16及控制器17。
42.本实施方式中,设转速传感器为应用于各种类型的车辆的电流式转速传感器进行了说明。此处,电压转换模块11将从电流式转速传感器输出的电流信号转换成电压信号。但在从其他类型的转速传感器输出的传感器信号为电压信号的情况下,也可省略该电压转换模块11。
43.滤波模块12对从转速传感器输出的传感器信号进行滤波。在本例中,滤波模块12对电压转换模块11转换出的电压信号进行滤波。
44.阈值设定模块13用于设定阈值电压信号。检测模块14用于判断传感器信号是否正常,本例中判断电压转换模块11转换出的电压信号是否正常。在检测模块14判断为传感器信号异常的情况下,识别为转速传感器自身产生了故障。
45.比较器15将由滤波模块12滤波后的传感器信号与阈值电压信号进行比较。控制器17判断比较器15输出的信号是否为脉冲波形。
46.在比较器15输出的信号为脉冲波形的情况下,控制器17根据脉冲波形的宽度来识别转速传感器的旋转方向是正转还是反转。具体而言,在脉冲波形的宽度较窄时,识别为转速传感器是正转。在脉冲波形的宽度较宽时,识别为转速传感器是反转。
47.另一方面,在比较器15输出的信号并非脉冲波形、且检测模块14判断为传感器信
min和low supply current min)的情况,此时对应于一个阈值电压,右侧为传感器信号的输入波形为最大(high supply current max和low supply current max)的情况,此时对应于另一个更高的阈值电压。
62.从图8中可以看出,左侧显示即使扩大阈值电压上下限差值后,也不会导致误触发,右侧显示即使增大rc滤波,也不会导致误触发。
63.下面,结合图9,对本发明的实施方式所涉及的转速传感器旋转方向识别方法进行说明。
64.如图9所示,开始动作后,步骤s1中,利用滤波模块对从转速传感器输出的传感器信号进行滤波。步骤s2中,利用阈值设定模块设定阈值电压信号。步骤s3中,利用检测模块判断传感器信号是否正常。在步骤s3判断为传感器信号异常(s3:否)的情况下,结束动作。
65.步骤s4中,利用比较器将由滤波模块滤波后的传感器信号与设定的阈值电压信号进行比较。步骤s5中,利用控制器判断比较器输出的信号是否为脉冲波形。
66.步骤s6中,在步骤s5判断出比较器输出的信号为脉冲波形(s5:是)的情况下,根据脉冲波形的宽度来识别转速传感器的旋转方向是正转还是反转。
67.另一方面,在步骤s7中,在步骤s5判断出比较器输出的信号并非脉冲波形(s5:否)、且在步骤s3判断为传感器信号正常(s3:是)的情况下,控制补正模块对阈值电压信号进行补正。之后,前进至步骤s4。
68.本示例中,步骤s2也可设置在步骤s1之前,步骤s3只要设置在步骤s7之前即可。
69.接下来,利用图10及图11,说明电阻r1、r2、r3及补正电阻r’的阻值选取步骤。
70.首先,根据传感器信号的输入波形为最小的情况,利用下述公式(1)计算所需设定的阈值电压上限的目标值vh。
[0071][0072]
其中,此时的imax和imin分别为图10中的high supply current min和low supply current min,r
下拉电阻
为下拉电阻r的阻值。若下拉电阻r为多个,则r
下拉电阻
为多个下拉电阻r的并联阻值。
[0073]
根据此时的阈值电压上限的目标值vh,通过下述公式(2)计算出所需要的电阻r1、r2、r3的阻值(进行电阻r1、r2、r3的阻值选取,使得阈值电压vth达到阈值电压上限的目标值vh)。
[0074][0075]
其中,vh是传感器信号经rc滤波后衰减的输入波形的电平。
[0076]
公式(2)的(vth>vh)及(vth<vh)情况下计算出的阈值电压分别对应于图10所标注的
①
(阈值电压上限)和
②
(阈值电压下限),电阻r1、r2、r3的阻值选取仅需通过公式(2)的(vth>vh)情况计算即可。
[0077]
接下来,在设定了电阻r1、r2、r3的阻值后,根据传感器信号的输入波形为最大的情况,利用公式(1)计算此时所需设定的阈值电压上限的目标值vh。此时公式(1)中的imax和imin如图11中的high supply current max和low supply current max。
[0078]
计算出此时的阈值电压上限的目标值vh后,通过使补正模块16中的开关元件s导通,将补正电阻r’和电阻r1并联,使原本的电阻r1的阻值得到改变,从而改变阈值电压。具体而言,利用下述公式(3)计算出补正电阻r’的阻值,使得阈值电压vth达到阈值电压上限的目标值vh。
[0079][0080]
其中,r1//r’为电阻r1和补正电阻r’的并联阻值。
[0081]
通过上述步骤,可实现新的阈值电压上限的目标值vh。
[0082]
另外,上述转速传感器旋转方向识别装置中,利用cpu来实现控制器的功能,但控制器的功能可以由执行储存于存储器的程序的处理器(中央处理装置、处理装置、运算装置、微处理器、微计算机、dsp(digital signal processor:数字信号处理器))来实现。在由处理器来实现的情况下,控制器的功能由软件等(软件、固件或软件和固件)的组合来实现。软件等被记载为程序,储存于存储器。由处理器读取并执行存储于存储器中的程序,从而实现控制器功能。
[0083]
此外,本发明的转速传感器旋转方向识别方法可通过由处理器读取并执行存储于存储器中的程序来实现。此处,存储器例如有ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、闪存、eprom(erasable programmable read only memory:可擦写可编程只读存储器)、eeprom(electrically erasable programmable read only memory:电可擦写可编程只读存储器)等非易失性或易失性半导体存储器、hdd(hard disk drive:硬盘驱动器)、磁盘、软盘、光盘、压缩光盘、迷你光盘、dvd(digital versatile disk:数字多功能光盘)及其驱动装置等所有存储介质。
[0084]
本发明进行了详细的说明,但上述实施方式仅是所有实施方式中的示例,本发明并不局限于此。本发明可以在该发明的范围内对实施方式的任意构成要素进行变形。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1