一种无人机动力系统起飞时工作状态判断及控制方法与流程
[0001]
本发明属于无人机飞行安全及控制领域,涉及一种无人机动力系统起飞时工作状态判断及控制方法。
背景技术:
[0002]
动力系统是无人机的重要系统,动力系统如果工作不正常,推力下降,在起飞阶段会导致无人机起飞滑跑距离过长,冲出跑道或爬升缓慢;在飞行阶段可能导致无人机不能完成飞行任务,甚至无人机坠机。因此,为提升无人机飞行安全,避免出现人员和财产损失,在起飞阶段对无人机动力系统工作状态进行准确判断尤为重要。
[0003]
无人机起飞前动力系统工作状态未知,机载传感器可通过飞行前自检确定工作状态,只有动力系统在飞行前缺乏自检测和测试手段。动力系统工作状态影响因素包括维护保养、外部环境(如风沙)、螺旋桨桨距角、燃油品质、桨发匹配等因素会导致很难第一时间发现动力系统实际状态。无人机通常采用测静态推力的方法判断动力系统工作状态,但通常在外场试验时没有测力装置,只能通过观察发动机转速间接分析判断,由于多种因素耦合,发动机转速不能完全反应动力系统的实际状态。另一种方法是在起飞前进行无人机大油门滑跑试验,但该方法非实时,不系统,且需离线分析,增加试验时间和成本。
[0004]
由于起飞滑跑阶段速度和发动机转速时刻都在变化,目前尚没有较好得方法准确判断无人机动力系统的工作状态。而在起飞离地后发现动力系统故障存在极大的安全问题。
技术实现要素:
[0005]
本发明解决的技术问题是:克服现有技术的不足,提出了一种无人机动力系统起飞时工作状态判断及控制方法,可准确判断无人机动力系统工作状态,保障无人机飞行安全。
[0006]
本发明所采用的技术方案是:一种无人机动力系统起飞时工作状态判断及控制方法,包括步骤如下:
[0007]
(1)根据无人机正常状态起飞离地速度v
ld
和安全余量,设置预定判断速度v
yp
;
[0008]
(2)通过实际滑跑试验获得无人机在不同机场海拔高度、跑道坡度、起飞重量、风速下到达对应预定判断速度v
yp
的时间t
sj
,并基于得到的试验数据辨识出适用于计算无人机到达预定判断速度v
yp
的时间t
yp
的辨识模型;或建立飞行动力学模型并通过实际滑跑试验数据修正飞行动力学模型,采用飞行动力学模型计算得到无人机在不同机场海拔高度、跑道坡度、起飞重量、风速下到达对应预定判断速度v
yp
的时间t
yp
;
[0009]
(3)将步骤(2)中得到的辨识模型或飞行动力学模型写入飞行控制程序;无人机起飞时,利用飞行控制程序,根据已知的机场海拔高度、跑道坡度、起飞重量、风速实时计算出预定判断时间t
yp
;
[0010]
(4)利用飞行控制程序自动比较无人机起飞时到达预定判断速度v
yp
的实际时间
t
sj
与飞行控制程序计算值t
yp
:当t
sj
不大于t
yp
时,表示动力系统工作正常,无人机正常起飞;当t
sj
大于t
yp
时,飞行控制程序根据预先设置的许可误差判断是否在许可误差范围内,如在许可误差范围内,表示动力系统工作正常,无人机正常起飞,如在误差范围外,表示动力系统故障,飞行控制程序自动发出指令终止起飞。
[0011]
所述步骤(2)中,通过实际滑跑试验得到辨识模型的方法如下:
[0012]
2.1)在无人动力系统正常的情况下,在至少2个不同海拔机场分别测试多组滑跑试验,在同一机场根据不同起飞重量分成多组进行滑跑测试试验,每组试验无人机保持相同的油门、俯仰通道进行滑跑试验,记录机场海拔和跑道的坡度值以及每次试验滑跑过程中的风速值;
[0013]
2.2)利用遗忘因子递推最小二乘算法对模型对象参数进行参数辨识,得到辨识模型。
[0014]
辨识模型如下:
[0015]
v
yp
=k0+k1t
yp
+k2w+k3θ+k4h+k5g;
[0016]
其中,v
yp
为预定判断速度,k0、k1、k2、k3、k4、k5分别为模型对象参数,w为风速,θ为跑道坡度,h为机场高度,g为起飞重量。
[0017]
若正常状态起飞离地速度v
ld
≥30m/s,预定判断速度v
yd
的取值为按比例系数乘以正常状态起飞离地速度v
ld
,比例系数的取值范围为0.6~0.8;
[0018]
若正常状态起飞离地速度30m/s>v
ld
>20m/s,预定判断速度v
yd
的取值为按比例系数乘以正常状态起飞离地速度v
ld
或正常状态起飞离地速度v
ld
减去固定值b;
[0019]
若正常状态起飞离地速度v
ld
≤20m/s,预定判断速度v
yd
的取值为:正常状态起飞离地速度v
ld
减去固定值b。
[0020]
所述预定判断速度v
yd
根据需要取0海拔对应的速度,或取一组对应不同空气密度的数组。
[0021]
所述许可误差范围根据t
yp
按设定的比例确定或取固定值。
[0022]
本发明与现有技术相比有益效果为:
[0023]
(1)本发明提出的方法,相比现有静态测试动力系统观察转速或大油门滑跑试验判断动力系统工作状态,实时性更好,且更为系统、准确、方便,可在起飞阶段准确判断无人机动力系统的工作状态,避免无人机在动力系统故障状态下起飞,保障无人机飞行安全。
[0024]
(2)本发明方法简明通用,不仅可用于多种类型螺旋桨推进无人机起飞时动力系统工作状态判断,采用喷气推进类型无人机起飞时动力系统工作状态判断也可参照使用。
附图说明
[0025]
图1为本发明的方法流程图;
具体实施方式
[0026]
结合附图和实施例对本发明进一步说明。
[0027]
如图1所示,本发明提出了一种无人机动力系统起飞时工作状态判断及控制方法,包括步骤如下:
[0028]
(1)根据无人机正常状态起飞离地速度v
ld
,考虑安全余量,设置预定判断速度v
yp
;
[0029]
(2)通过实际滑跑试验获得无人机在不同机场海拔高度、跑道坡度、起飞重量、风速下到达对应预定判断速度v
yp
的时间t
sj
,并基于得到的试验数据辨识出适用于计算无人机到达预定判断速度v
yp
的时间t
yp
的辨识模型。也可建立飞行动力学模型并通过实际滑跑试验数据修正飞行动力学模型,采用飞行动力学模型计算得到无人机在各种状态下到达对应预定判断速度v
yp
的时间t
yp
;
[0030]
(3)将辨识模型或飞行动力学模型写入飞行控制程序。无人机起飞时飞行控制程序根据已知的机场海拔高度、跑道坡度、起飞重量、风速实时计算出预定判断时间t
yp
;
[0031]
(4)无人机起飞时到达预定判断速度v
yp
的实际时间为t
sj
,飞行控制程序自动比较t
sj
与飞行控制程序计算值t
yp
:当t
sj
不大于t
yp
时,表示动力系统工作正常,无人机正常起飞;当t
sj
大于t
yp
时,飞行控制程序根据预先设置的许可误差判断是否在许可误差范围内,如在许可误差范围内,表示动力系统工作正常,无人机正常起飞,如在误差范围外,表示动力系统故障,飞行控制程序自动发出指令终止起飞。
[0032]
所述通过试验得到辨识模型的方法如下:
[0033]
1)在无人动力系统正常的情况下,在多个不同海拔机场(2个以上)测试多组滑跑试验。在同一机场根据不同起飞重量分成多组进行滑跑测试试验,每组试验无人机保持相同的油门、俯仰通道进行滑跑试验,记录机场海拔和跑道的坡度值以及每次试验滑跑过程中的风速值;
[0034]
2)利用遗忘因子递推最小二乘算法(ffrls)对模型对象参数进行参数辨识得到辨识模型;
[0035]
辨识模型如下:
[0036]
v
yp
=k0+k1t
yp
+k2w+k3θ+k4h+k5g
[0037]
其中,v
yp
为预定判断速度,k0、k1、k2、k3、k4、k5为模型对象参数,t
yp
为预定判断时间,w为风速,θ为跑道坡度,h为机场高度,g为起飞重量。
[0038]
所述正常状态起飞离地速度v
ld
如较大,预定判断速度v
yd
可以按比例系数乘以正常状态起飞离地速度v
ld
,比例系数可取0.6~0.8;正常状态起飞离地速度v
ld
如较小,预定判断速度v
yd
可以按正常状态起飞离地速度v
ld
减去固定值。
[0039]
所述预定判断速度v
yd
可以根据需要简化取空气密度最大时即0海拔对应的速度v
yd
,也可以是一组对应不同空气密度的数组。
[0040]
所述许可误差范围可根据t
yp
按一定比例确定或取一固定值,一般不超过10%或0.5s。
[0041]
实施例1:
[0042]
某无人机正常状态海平面起飞离地速度v
ld
=13m/s,预定判断速度v
yp
取为8m/s;
[0043]
某次滑跑试验,无人机正常状态下,跑道海拔1500m,油门104%,起飞重量425kg,1m/s逆风,到达预定判断速度v
yp
=8m/s时t
yp
=2.4s。
[0044]
某次飞行试验,在相同跑道,油门115%,起飞重量450kg,无风,许可误差范围为0.5s,根据辨识模型计算得到的t
yp
=2.5s。滑跑到达预定判断速度v
yp
=8m/s时间t
sj
=4.9s,大于t
yp
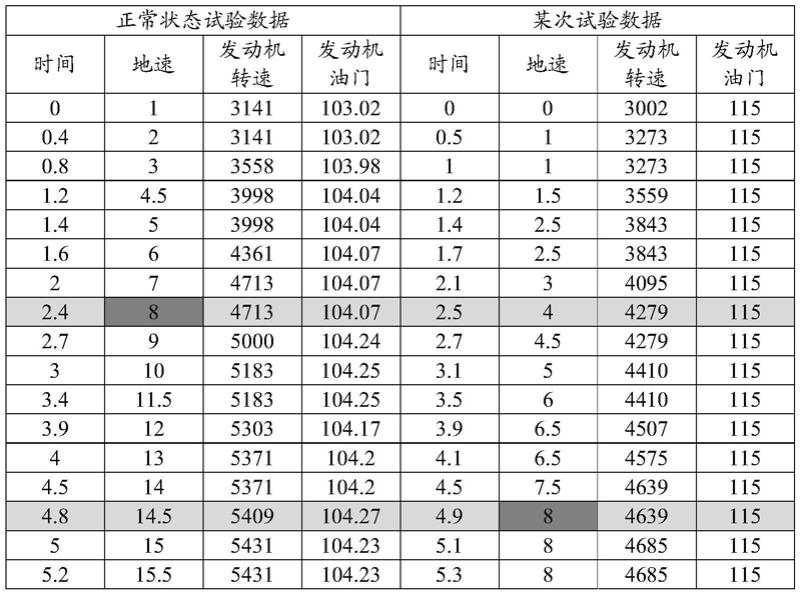
=2.5s,且大于许可误差范围。飞行控制程序判断动力系统故障,自动发出指令终止起飞。
[0045]
终止起飞后,通过试验数据分析,判断动力系统故障。通过与正常状态试验数据对
比可以看出某次试验中发动机动力不足,加速缓慢。经后续排查,是由于沙尘原因导致发动机故障。
[0046]
在实际滑跑试验中由于发动机转速时刻变化,直接通过转速很难判断发动机是否正常。但通过比较到达预定判断速度的时间,可以直接判断发动机故障,飞行控制程序自动终止起飞,提高了飞行安全。
[0047]
表1某次试验数据与正常状态试验数据对比
[0048][0049]
本发明所阐述的内容为该领域具体应用的一个实例,但任何熟知该领域的专业人员,应明确本发明包含但不限于本实例,在此基础上所做的任何改动都属于本发明知识和技术产权保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1