一种基于主被动探测手段的无人机监测作业平台及方法与流程
[0001]
本发明涉及气象学技术领域,具体涉及一种基于主被动探测手段的无人机监测作业平台及方法。
背景技术:
[0002]
传统的人工影响天气手段主要包括地面燃烧催化剂,发射火箭弹释放催化剂;高炮增雨防雹作业,有人机实施焰条燃烧播撒催化剂等,然而上述手段还存在很大问题。
[0003]
其中,地面人工手段效率低、见效慢、准确性低;火箭弹释放催化剂作业精度有限,存在一定风险问题;高炮作业位置相对固定,难以发挥人影效益;有人机易受天气条件的影响,人员安全难以保障,更不能进行穿云作业。同时,上述手段,都不具备对预定作业区域进行大气要素实时监测、判断人影作业条件的探测手段,无法对作业过程进行实时监控评估,属于盲目作业手段,严重影响了人影作业的效率。
[0004]
因此,为了解决上述问题,亟需一种集空地云、雨、气溶胶和风气象要素精细探测、作业方案制定、作业指挥控制、催化作业实施、作业效果评估及态势综合显示等功能于一体的新型智能化无人机监测作业平台设计。
技术实现要素:
[0005]
本发明是为了解决传统人工影响天气手段效率低、见效慢、准确性低等问题,以先进成熟无人机为搭载平台,进行集空地云、雨、气溶胶和风气象要素精细探测、作业方案制定、作业指挥控制、催化作业实施、作业效果评估及态势综合显示等功能于一体的新型智能化无人机监测作业平台设计。本发明利用先进成熟无人机平台,可在野外简易条件下、快速部署安装使用;利用激光雷达和毫米波云雨雷达主动遥感探测技术实现航线下气溶胶、云、雨、风等要素的三维立体探测,利用航线气象仪完成对航线上温、湿、压、风速等常规气象要素的连续监测;通过焰弹焰条一体化播撒装置完成对冷云/暖云催化剂的播撒;通过机载数据链终端和地面链路终端,实现地面对无人机及载荷的指挥控制、以及无人机载荷探测数据和作业监控数据的实时下传;同时,机上下传的气象感测数据及作业过程监控数据经过数据融合分析,实现作业条件判断、催化作业实施、作业跟踪指挥、作业效果评估及态势综合显示等功能;最终,形成人影监测、作业及评估综合体系设计,实现多要素精细探测、高效作业、智能评估的设计目标。
[0006]
本发明提供一种基于主被动探测手段的无人机监测作业平台,包括:结合气象预报资料部署实施人工影响天气初步作业计划并传输探测数据的部署于指定区域的无人机平台子系统,搭载激光微波主动遥感载荷和原位传感器探测载荷并传输获取云、雨、气溶胶、风以及航线温湿压多要素探测数据的机载探测子系统,实施催化作业的催化作业子系统和用于对无人机平台子系统、机载探测子系统、催化作业子系统进行运行调度及运行状态监控并对探测数据进行融合分析制定及实时修正人工影响天气初步作业计划、制定催化作业计划的地面指挥控制子系统。
[0007]
本发明所述的一种基于主被动探测手段的无人机监测作业平台,作为优选方式,无人机平台子系统包括:搭载机载探测载荷并实施初步作业计划的无人机机体、用于无人机机体起落的起落架系统、为无人机机体提供动力的动力系统、为无人机机体提供电力的电气系统、用于对无人机机体进行管理控制的任务系统、用于低频信号和功率传输的线束接口系统、防雷雨防冰系统和用于无人机机体安全降落的降落伞系统。
[0008]
本发明所述的一种基于主被动探测手段的无人机监测作业平台,作为优选方式,其特征在于:
[0009]
激光微波主动遥感载荷载荷包括以下一种或几种:多通道气溶胶-云粒子激光雷达、多模式测风激光雷达、毫米波云雨测量雷达、云影像观测相机、航线气象仪。
[0010]
本发明所述的一种基于主被动探测手段的无人机监测作业平台,作为优选方式,毫米波云雨测量雷达是机载ka/w多频段云雨雷达。
[0011]
本发明所述的一种基于主被动探测手段的无人机监测作业平台,作为优选方式,云影像观测相机采用可见光ccd。
[0012]
本发明所述的一种基于主被动探测手段的无人机监测作业平台,作为优选方式,:催化作业子系统包括焰条播撒吊舱组及实施催化作业的催化载荷,焰条播撒吊舱组是装载暖云或冷云催化剂的焰条焰弹吊舱一体化装置。
[0013]
本发明所述的一种基于主被动探测手段的无人机监测作业平台,作为优选方式,地面指挥控制子系统包括地面指挥控制站、地面差分站、用于与无人机平台子系统传输探测数据的视距链路及卫通链路和综合显控软件;
[0014]
地面指挥控制站包括用于通过视距链路及卫通链路发送接收数据的数据处理计算机和用于接收数据处理计算机的数据并对无人机平台子系统、机载探测子系统、催化作业子系统进行运行调度及运行状态监控的中心管理监控计算机;数据处理计算机和中心管理监控计算机安装综合显控软件。
[0015]
本发明提供一种基于主被动探测手段的无人机监测作业方法,包括如下步骤:
[0016]
s1、将无人机平台子系统部署于指定区域,结合气象预报资料,地面指挥控制子系统的综合显控软件给出作业目标区域,制定人工影响天气初步作业计划;
[0017]
s2:地面指挥控制子系统开始对无人机平台子系统、机载探测子系统和催化作业子系统的运行进行调度、运行状态监控并得到监控数据,实时显示;
[0018]
s3:无人机机体依据人工影响天气初步作业计划飞行至目标区域进行探测并将探测数据实时回传至地面指挥控制子系统,机载探测子系统同时将探测数据反馈至地面指挥控制子系统,地面指挥控制子系统融合反演探测数据,进行催化条件判据,给出催化作业条件潜力判据数据,并自动调整修正催化作业计划,智能化引导催化作业子系统实施催化作业并得到催化作业数据;
[0019]
s4:地面指挥控制子系统对步骤s1至步骤s3的探测数据、监控数据和催化作业数据进行分类、汇总分析得到综合数据,实现催化作业效果评估及态势综合显示;
[0020]
s5:地面指挥控制子系统将综合数据上传至数据中心。
[0021]
本发明所述的一种基于主被动探测手段的无人机监测作业方法,作为优选方式,
[0022]
步骤s3中探测数据包括如下的一种或几种:气溶胶种类、气溶胶垂直分布、气溶胶粒子数浓度、三维风场分布、径向风速、云类型、云高、云粒子、过冷水含量分布、粒子谱分
布、单位体积数浓度、云总量、云宏观动态变化、航线温度、航线湿度、航线压力或航线风力。
[0023]
本发明采用先进成熟的无人机机体,无人机作业半径可达400km,作业高度不小于7500m,探测作业时间不小于3h,有效载荷不小于400kg,最大起降距离小于500m;可在公路、平坦草地等简易起降条件下,快速机动部署安装使用;具有一定的防护能力,防结冰、防雨、防雷电。同时,具有整机降落伞功能,在意外情况下能够开伞保护飞机和探测作业载荷安全。
[0024]
搭载先进激光微波主动遥感载荷载荷和传感器探测载荷,实现对对航线下方云、雨、气溶胶、风三维立体监测、航线常规气象要素实时连续探测。
[0025]
采用多通道气溶胶-云粒子激光雷达、多模式测风激光雷达,完成航线下方气溶胶种类、气溶胶垂直分布、气溶胶粒子数浓度等气溶胶环境,三维风场分布、径向风速等数据产品,以及云类型、云高、云粒子、粒子谱分布等宏微观特征探测。
[0026]
所述的毫米波探测载荷为机载ka/w多频段云雨雷达,可实现对航线下方云类型、云高、云粒子、过冷水含量分布、粒子谱分布、单位体积数浓度等云雨宏微观特征要素探测。
[0027]
云影像观测相机采用可见光ccd,完成对航线下云总量及宏观动态变化的探测。
[0028]
采用焰条焰弹吊舱一体化设计,可装载暖云/冷云催化剂,实现人工降雨、减云和消雾作业目的。
[0029]
采用视距数据链路和卫通超视距链路,确保无人机在穿云作业等恶劣环境的正常通讯,实现地面对无人机的控制,并对无人机平台探测及工作状态数据实时处理分析,生产数据产品,进行催化作业条件判据、作业过程控制、作业效果评估等。
[0030]
无人机及任务载荷数据通过数据链路下传至地面指挥控制子系统,通过串口网口网络交换机发送至数据处理计算机;地面设备数据同样通过网络交换机上传至数据处理计算机;数据处理计算机将生产数据产品输出至中心管理监控计算机,实现产品显示及作业状态监控。
[0031]
地面指挥控制子系统可实时监控并显示无人机飞行状态及各任务载荷的工作情况,可根据探测载荷实时回传的观探测信息,智能化引导无人机探测和催化作业;可综合分析多种信息,及时进行作业效果评估。
[0032]
本发明具有以下优点:
[0033]
(1)本发明采用成熟可靠、安全性高、后期运营成本相对低廉的中小型无人机平台,飞行高度可达7500m、滞空时间可达3小时、有效载荷不小于400kg、具备整机伞降保护能力,并且对起降场要求较低,可在简易机场或通航(2b)机场进行起降;
[0034]
(2)本发明中采用主动与被动相补充、原位测量与遥感探测相结合,可实现对云内部精细结构和动态变化的感测,对航线下方云、雨、气溶胶、风三维立体监测、航线常规气象要素实时连续探测;
[0035]
(3)与现有相关技术和装备相比,本发明设计的无人机监测作业平台快速机动部署安装使用,具有操作简单、探测要素多样、作业能力强、安全性高等特点。
附图说明
[0036]
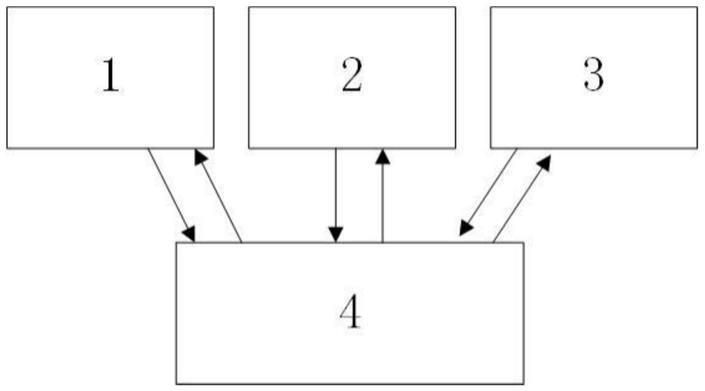
图1为一种基于主被动探测手段的无人机监测作业平台结构图;
[0037]
图2为一种基于主被动探测手段的无人机监测作业平台无人机平台子系统结构
图;
[0038]
图3为一种基于主被动探测手段的无人机监测作业平台催化作业子系统结构图;
[0039]
图4为一种基于主被动探测手段的无人机监测作业平台地面控制子系统结构图;
[0040]
图5为一种基于主被动探测手段的无人机监测作业方法流程图;
[0041]
图6为一种基于主被动探测手段的无人机监测作业平台实施例5结构图;。
具体实施方式
[0042]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0043]
实施例1
[0044]
如图1所示,一种基于主被动探测手段的无人机监测作业平台,包括:结合气象预报资料部署实施人工影响天气初步作业计划并传输探测数据的部署于指定区域的无人机平台子系统1,搭载激光微波主动遥感载荷和原位传感器探测载荷并传输获取云、雨、气溶胶、风以及航线温湿压多要素探测数据的机载探测子系统2,实施催化作业的催化作业子系统3和用于对无人机平台子系统1、机载探测子系统2、催化作业子系统3进行运行调度及运行状态监控并对探测数据进行融合分析制定及实时修正人工影响天气初步作业计划、制定催化作业计划的地面指挥控制子系统4。
[0045]
实施例2
[0046]
如图1-4所示,一种基于主被动探测手段的无人机监测作业平台,包括:结合气象预报资料部署实施人工影响天气初步作业计划并传输探测数据的部署于指定区域的无人机平台子系统1,搭载激光微波主动遥感载荷和原位传感器探测载荷并传输获取云、雨、气溶胶、风以及航线温湿压多要素探测数据的机载探测子系统2,实施催化作业的催化作业子系统3和用于对无人机平台子系统1、机载探测子系统2、催化作业子系统3进行运行调度及运行状态监控并对探测数据进行融合分析制定及实时修正人工影响天气初步作业计划、制定催化作业计划的地面指挥控制子系统4;
[0047]
无人机平台子系统1包括:搭载机载探测载荷并实施初步作业计划的无人机机体11、用于无人机机体11起落的起落架系统12、为无人机机体11提供动力的动力系统13、为无人机机体11提供电力的电气系统14、用于对无人机机体进行管理控制的任务系统15、用于低频信号和功率传输的线束接口系统16、防雷雨防冰系统17和用于无人机机体11安全降落的降落伞系统18;
[0048]
激光微波主动遥感载荷载荷包括以下一种或几种:多通道气溶胶-云粒子激光雷达、多模式测风激光雷达、毫米波云雨测量雷达、云影像观测相机、航线气象仪;
[0049]
毫米波云雨测量雷达是机载ka/w多频段云雨雷达;
[0050]
云影像观测相机采用可见光ccd;
[0051]
催化作业子系统3包括焰条播撒吊舱组31及实施催化作业的催化载荷32,焰条播撒吊舱组31是装载暖云或冷云催化剂的焰条焰弹吊舱一体化装置;
[0052]
地面指挥控制子系统4包括地面指挥控制站41、地面差分站42、用于与无人机平台子系统1传输探测数据的视距链路43及卫通链路44和综合显控软件45;
[0053]
地面指挥控制站41包括用于通过视距链路43及卫通链路44发送接收数据的数据
处理计算机和用于接收数据处理计算机的数据并对无人机平台子系统1、机载探测子系统2、催化作业子系统3进行运行调度及运行状态监控的中心管理监控计算机;数据处理计算机和中心管理监控计算机安装综合显控软件45。
[0054]
实施例3
[0055]
如图5所示,一种基于主被动探测手段的无人机监测作业方法,包括如下步骤:
[0056]
s1、将无人机平台子系统1部署于指定区域,结合气象预报资料,地面指挥控制子系统4的综合显控软件45给出作业目标区域,制定人工影响天气初步作业计划;
[0057]
s2:地面指挥控制子系统4开始对无人机平台子系统1、机载探测子系统2和催化作业子系统3的运行进行调度、运行状态监控并得到监控数据,实时显示;
[0058]
s3:无人机机体11依据人工影响天气初步作业计划飞行至目标区域进行探测并将探测数据实时回传至地面指挥控制子系统4,机载探测子系统2同时将探测数据反馈至地面指挥控制子系统4,地面指挥控制子系统4融合反演探测数据,进行催化条件判据,给出催化作业条件潜力判据数据,并自动调整修正催化作业计划,智能化引导催化作业子系统3实施催化作业并得到催化作业数据;
[0059]
s4:地面指挥控制子系统4对步骤s1至步骤s3的探测数据、监控数据和催化作业数据进行分类、汇总分析得到综合数据,实现催化作业效果评估及态势综合显示;
[0060]
s5:地面指挥控制子系统4将综合数据上传至数据中心。
[0061]
实施例4
[0062]
如图5所示,一种基于主被动探测手段的无人机监测作业方法,包括如下步骤:
[0063]
s1、将无人机平台子系统1部署于指定区域,结合气象预报资料,地面指挥控制子系统4的综合显控软件45给出作业目标区域,制定人工影响天气初步作业计划;
[0064]
s2:地面指挥控制子系统4开始对无人机平台子系统1、机载探测子系统2和催化作业子系统3的运行进行调度、运行状态监控并得到监控数据,实时显示;
[0065]
s3:无人机机体11依据人工影响天气初步作业计划飞行至目标区域进行探测并将探测数据实时回传至地面指挥控制子系统4,机载探测子系统2同时将探测数据反馈至地面指挥控制子系统4,地面指挥控制子系统4融合反演探测数据,进行催化条件判据,给出催化作业条件潜力判据数据,并自动调整修正催化作业计划,智能化引导催化作业子系统3实施催化作业并得到催化作业数据;
[0066]
探测数据包括如下的一种或几种:气溶胶种类、气溶胶垂直分布、气溶胶粒子数浓度、三维风场分布、径向风速、云类型、云高、云粒子、过冷水含量分布、粒子谱分布、单位体积数浓度、云总量、云宏观动态变化、航线温度、航线湿度、航线压力或航线风力;
[0067]
s4:地面指挥控制子系统4对步骤s1至步骤s3的探测数据、监控数据和催化作业数据进行分类、汇总分析得到综合数据,实现催化作业效果评估及态势综合显示;
[0068]
s5:地面指挥控制子系统4将综合数据上传至数据中心。
[0069]
实施例5
[0070]
如图1-6所示,一种基于主被动探测手段的无人机监测作业平台及方法,其中,一种基于主被动探测手段的无人机监测作业平台包括:结合气象预报资料部署实施人工影响天气初步作业计划并传输探测数据的部署于指定区域的无人机平台子系统1,搭载激光微波主动遥感载荷和原位传感器探测载荷并传输获取云、雨、气溶胶、风以及航线温湿压探测
数据的机载探测子系统2,实施催化作业的催化作业子系统3和用于对无人机平台子系统1、机载探测子系统2、催化作业子系统3进行运行调度及运行状态监控并对探测数据进行融合分析制定及实时修正人工影响天气初步作业计划、制定催化作业计划的地面指挥控制子系统4;
[0071]
无人机平台子系统1包括:搭载机载探测载荷并实施初步作业计划的无人机机体11、用于无人机机体11起落的起落架系统12、为无人机机体11提供动力的动力系统13、为无人机机体11提供电力的电气系统14、用于对无人机机体11进行管理控制的任务系统15、用于低频信号和功率传输的线束接口系统16、防雷雨防冰系统17和用于无人机机体11安全降落的降落伞系统18;
[0072]
激光微波主动遥感载荷载荷包括以下一种或几种:多通道气溶胶-云粒子激光雷达、多模式测风激光雷达、毫米波云雨测量雷达、云影像观测相机、航线气象仪;
[0073]
毫米波云雨测量雷达是机载ka/w多频段云雨雷达;
[0074]
云影像观测相机采用可见光ccd;
[0075]
催化作业子系统3包括焰条播撒吊舱组31及实施催化作业的催化载荷32,焰条播撒吊舱组31是装载暖云或冷云催化剂的焰条焰弹吊舱一体化装置;
[0076]
地面指挥控制子系统4包括地面指挥控制站41、地面差分站42、用于与无人机平台子系统1传输探测数据的视距链路43及卫通链路44和综合显控软件45;
[0077]
地面指挥控制站41包括用于通过视距链路43及卫通链路44发送接收数据的数据处理计算机和用于接收数据处理计算机的数据并对无人机平台子系统1、机载探测子系统2、催化作业子系统3进行运行调度及运行状态监控的中心管理监控计算机;数据处理计算机和中心管理监控计算机安装综合显控软件45。
[0078]
无人机平台子系统1采用先进成熟的无人机机体(11),无人机作业半径400km,作业高度7500m,探测作业时间3h,有效载荷400kg,最大起降距离500m;
[0079]
机载探测子系统2搭载先进激光微波主动遥感载荷载荷和原位传感器探测载荷;采用多通道气溶胶-云粒子激光雷达、多模式测风激光雷达;毫米波探测载荷为机载ka/w多频段云雨雷达。
[0080]
催化作业子系统3采用焰条焰弹吊舱一体化设计,装载暖云/冷云催化剂。
[0081]
无人机及任务载荷数据通过数据链路下传至地面指挥控制子系统4,通过串口网口网络交换机发送至数据处理计算机;地面设备数据同样通过网络交换机上传至数据处理计算机;数据处理计算机将生产数据产品输出至中心管理监控计算机,实现产品显示及作业状态监控。
[0082]
一种基于主被动探测手段的无人机监测作业方法,包括如下步骤:
[0083]
s1、将无人机平台子系统1部署于指定区域,结合气象预报资料,地面指挥控制子系统4的综合显控软件45给出作业目标区域,制定人工影响天气初步作业计划;
[0084]
s2:地面指挥控制子系统4开始对无人机平台子系统1、机载探测子系统2和催化作业子系统3的运行进行调度、运行状态监控并得到监控数据,实时显示;
[0085]
s3:无人机机体11依据人工影响天气初步作业计划飞行至目标区域进行探测并将探测数据实时回传至地面指挥控制子系统4,机载探测子系统2同时将探测数据反馈至地面指挥控制子系统4,地面指挥控制子系统4融合反演探测数据,进行催化条件判据,给出催化
作业条件潜力判据数据,并自动调整修正催化作业计划,智能化引导催化作业子系统3实施催化作业并得到催化作业数据;
[0086]
探测数据包括如下的一种或几种:气溶胶种类、气溶胶垂直分布、气溶胶粒子数浓度、三维风场分布、径向风速、云类型、云高、云粒子、过冷水含量分布、粒子谱分布、单位体积数浓度、云总量、云宏观动态变化、航线温度、航线湿度、航线压力或航线风力;
[0087]
s4:地面指挥控制子系统4对步骤s1至步骤s3的探测数据、监控数据和催化作业数据进行分类、汇总分析得到综合数据,实现催化作业效果评估及态势综合显示;
[0088]
s5:地面指挥控制子系统4将综合数据上传至数据中心。
[0089]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1