一种带单边锁紧的双轴转位机构的制作方法
[0001]
本发明涉及一种带单边锁紧的双轴转位机构,特别是一种具有在线自标定自对准功能的带单边锁紧的双轴转位机构。
背景技术:
[0002]
传统惯组标定需在实验室进行,其花费大量人力物力,且花费时间长,大大制约装备的机动性。为了弥补以上不足,提出了具有在线自标定自对准功能的双轴转位机构,现有技术中的双轴转位机构尺寸大,重量重,制约武器装备的发展。
技术实现要素:
[0003]
本发明其目的就在于提供一种带单边锁紧的双轴转位机构,以解决上述背景技术中的问题,在实现惯组自标定自对准可靠锁紧的前提下显著降低了设备的尺寸和重量。
[0004]
为实现上述目的而采取的技术方案是,一种带单边锁紧的双轴转位机构,包括外环组件,其特征在于,所述外环组件内部安装有内环组件,内环组件内部安装有负载组件;所述外环组件包括有机箱,机箱的右端设有外环驱动组件,机箱的左端设有外环测角组件,机箱的前端设有锁紧组件;所述内环组件包括有“o”型框架,“o”型框架的上端设有内环驱动组件,“o”型框架的下端设有内环测角组件,所述“o”型框架的左右两端分别与外环测角组件、外环驱动组件相连接;所述负载组件包括有负载框架,负载框架的前端设有动齿盘,负载框架的内部经减震器固定安装有负载,所述负载框架的上下两端分别与内环驱动组件、内环测角组件相连接。
[0005]
进一步,所述外环驱动组件和内环驱动组件的结构相同,均包括有电机座、电机定子、电机转子、驱动轴承座、a角接触轴承对、驱动轴,所述电机定子和驱动轴固定在电机座上,a角接触轴承对的内圈固定在驱动轴上,a角接触轴承对的外圈与驱动轴承座内孔相配合,电机转子固定在驱动轴承座外侧法兰上。
[0006]
进一步,所述外环测角组件和内环测角组件的结构相同,均包括有测角座、旋变定子、旋变转子、测角轴承座、b角接触轴承对、测角轴、轴承压盖、旋变定子压盖,所述旋变定子、旋变定子压盖和测角轴固定在测角座上,b角接触轴承对的内圈固定在测角轴上,b角接触轴承对的外圈与测角轴承座内孔配合,旋变转子固定在测角轴承座外侧法兰上。
[0007]
进一步,所述锁紧组件包括有锁紧座、滑动密珠座、滑动密珠保持架、滑动密珠、定齿盘、动齿盘、导向座、导向密珠保持架、导向密珠、导向销轴、蜗轮、蜗杆、伺服电机、伺服电机座、红外安装座、红外探头,所述滑动密珠座固定在所述锁紧座上,所述滑动密珠保持架置于所述滑动密珠座内侧,所述滑动密珠置于所述滑动密珠保持架中,所述定齿盘置于所述滑动密珠保持架内侧,所述导向座固定在所述锁紧座上,所述导向密珠保持架置于所述导向座内侧,所述导向密珠置于所述导向密珠保持架中,所述导向销轴置于所述导向密珠保持架内侧并固定在所述锁紧座上,所述蜗轮通过c轴承对支承置于锁紧座内,所述蜗杆通过d轴承对置于锁紧座内,所述蜗轮和蜗杆按正交布置,所述伺服电机固定在所述伺服电机
座上,所述伺服电机座固定在所述锁紧座上,所述伺服电机输出端插入所述蜗杆一端的槽内,所述红外安装座安装在所述锁紧座上,所述红外探头置于所述红外安装座内。
[0008]
有益效果与现有技术相比本发明具有以下优点。
[0009]
本发明的优点是,该结构能够在实现惯组自标定自对准可靠锁紧的前提下显著降低双轴转位机构设备的尺寸和重量,解决传统惯组标定需在实验室进行,其花费大量人力物力,且花费时间长,大大制约武器装备的机动性的问题。
附图说明
[0010]
以下结合附图对本发明作进一步详述。
[0011]
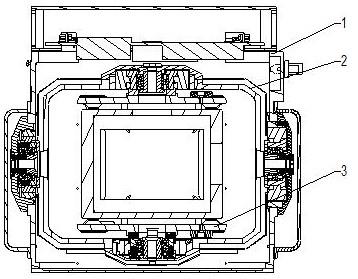
图1为本发明的结构正视图;图2为本发明中外环组件的结构俯视图;图3为本发明中内环组件结构正视图;图4为本发明中负载组件结构正视图;图5为本发明中外环驱动组件结构纵向剖视图;图6为本发明中外环测角组件结构纵向剖视图;图7为本发明中锁紧组件结构纵向剖视图;图8为本发明中锁紧组件结构横向剖视图。
具体实施方式
[0012]
下面结合实施例及附图对本发明作进一步描述。
[0013]
一种带单边锁紧的双轴转位机构,包括外环组件1,如图1-图8所示,所述外环组件1内部安装有内环组件2,内环组件2内部安装有负载组件3;所述外环组件1包括有机箱11,机箱11的右端设有外环驱动组件12,机箱11的左端设有外环测角组件13,机箱11的前端设有锁紧组件14;所述内环组件2包括有“o”型框架21,“o”型框架21的上端设有内环驱动组件22,“o”型框架21的下端设有内环测角组件23,所述“o”型框架21的左右两端分别与外环测角组件13、外环驱动组件12相连接;所述负载组件3包括有负载框架31,负载框架31的前端设有动齿盘33,负载框架31的内部经减震器34固定安装有负载32,所述负载框架31的上下两端分别与内环驱动组件22、内环测角组件23相连接。
[0014]
所述外环驱动组件12和内环驱动组件22的结构相同,均包括有电机座1201、电机定子1202、电机转子1203、驱动轴承座1204、a角接触轴承对1205、驱动轴1206,所述电机定子1202和驱动轴1206固定在电机座1201上,a角接触轴承对1205的内圈固定在驱动轴1206上,a角接触轴承对1205的外圈与驱动轴承座1204内孔相配合,电机转子1203固定在驱动轴承座1204外侧法兰上。
[0015]
所述外环测角组件13和内环测角组件23的结构相同,均包括有测角座1301、旋变定子1302、旋变转子1303、测角轴承座1304、b角接触轴承对1305、测角轴1306、轴承压盖1307、旋变定子压盖1308,所述旋变定子1302、旋变定子压盖1308和测角轴1306固定在测角座上1301,b角接触轴承对1305的内圈固定在测角轴1306上,b角接触轴承对1305的外圈与测角轴承座1304内孔配合,旋变转子1303固定在测角轴承座1304外侧法兰上。
[0016]
所述锁紧组件14包括有锁紧座1401、滑动密珠座1402、滑动密珠保持架1403、滑动密珠1404、定齿盘1405、c轴承对1406、导向座1407、导向密珠保持架1408、导向密珠1409、导向销轴1410、蜗轮1411、蜗杆1412、伺服电机1416、伺服电机座1417、红外安装座1413、红外探头1414、d轴承对1415,所述滑动密珠座1402固定在所述锁紧座1401上,所述滑动密珠保持架1403置于所述滑动密珠座1402内侧,所述滑动密珠1404置于所述滑动密珠保持架1403中,所述定齿盘1405置于所述滑动密珠保持架1403内侧,所述导向座1407固定在所述锁紧座1401上,所述导向密珠保持架1408置于所述导向座1407内侧,所述导向密珠1409置于所述导向密珠保持架1408中,所述导向销轴1410置于所述导向密珠保持架1408内侧并固定在所述锁紧座1401上,所述蜗轮1411通过c轴承对1406支承置于锁紧座1401内,所述蜗杆1412通过d轴承对1415置于锁紧座1401内,所述蜗轮1411和蜗杆1412按正交布置,所述伺服电机1416固定在所述伺服电机座1417上,所述伺服电机座1417固定在所述锁紧座1401上,所述伺服电机1416输出端插入所述蜗杆1412一端的槽内,所述红外安装座1413安装在所述锁紧座1401上,所述红外探头1414置于所述红外安装座1413内。
[0017]
本发明中,所述外环组件1包括机箱11和安装在机箱11右端的外环驱动组件12,安装在机箱11左端的外环测角组件13,安装在机箱11前端的锁紧组件14;所述内环组件2包括“o”型框架21和安装在“o”型框架21上端的内环驱动组件22,安装在“o”型框架21下端的内环测角组件23;所述负载组件3包括负载框架31、负载32、固定在负载框架上31的动齿盘33、连接负载框架31与负载32的减振器34。
[0018]
所述机箱11包括箱体、电子盒和电子盒上盖,电子盒固定连接在箱体上,电子盒上盖固定在电子盒上。
[0019]
所述外环驱动组件12用于驱动内环组件2转动,外环测角组件13用于内环组件2运动角度测量和反馈,实现内环组件2转动的闭环控制。
[0020]
所述内环驱动组件22用于驱动负载组件3转动,内环测角组件23用于负载组件3运动角度测量和反馈,实现负载组件3转动的闭环控制。
[0021]
所述负载32的上端和下端分别通过4个减振器34与所述负载框架31相连。
[0022]
所述电子盒内安装运动控制电路板和导航控制电路板,分别用于进行双轴转位机构的运动控制和负载的导航解算。
[0023]
本发明的工作原理是,在初始状态下,负载32处于锁紧状态,启动自标定自对准功能时,锁紧组件14中的伺服电机1416带动蜗杆1412和蜗轮1411转动,蜗轮1411末端通过螺纹副将定齿盘1405沿法向向锁紧组件14方向移动,当定齿盘1405运动到末端时蜗杆1412停止转动,此时,红外探头1414出指令,表明锁紧组件14脱开到位,然后,外环驱动组件12和内环驱动组件22逐一动作,分别通过外环测角组件13和内环测角组件23进行闭环控制,实现自标定自对准功能。完成自标定自对准功能后,“o”型框21和负载框架31转到初始位置,此时,锁紧组件14的伺服电机1416反向动作,驱动蜗杆1412和蜗轮1411,蜗轮1411末端的螺纹副带动定齿盘1405朝向负载32方向直线运动,实现定齿盘1405与动齿盘33的啮合,完成锁紧。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1