一种基于计算机远程控制的农业环境监测装置的制作方法
[0001]
本发明涉及监测设备领域,特别涉及一种基于计算机远程控制的农业环境监测装置。
背景技术:
[0002]
随着科技的进步,农业环境监测系统已经广泛地运用于农业生产经营中,极大地方便了农场的管理,甚至可以通过自动控制的方式来实现农场的环境控制。
[0003]
在环境监测工作中,由于需要将相应的传感器与空气相接触,将信号采集电路集成到整体的模块中,不能将模块完全封装。由于传感器需要暴露在环境中,且部分传感器,如雨量传感器、粉尘传感器等必须尽量暴露在空气中,无法设置相关的保护装置,因此在遇到一些恶劣天气,如冰雹、酸雨等天气情况时,容易对传感器等精密器件造成损坏。
技术实现要素:
[0004]
本发明提供一种基于计算机远程控制的农业环境监测装置,可以解决现有技术中的农业环境监测装置存在缺乏相应的保护措施、器件容易损毁的问题。
[0005]
一种基于计算机远程控制的农业环境监测装置,包括:
[0006]
底座;
[0007]
监测系统,包括一上部开口的监测箱,所述监测箱内设置有监测器,所述监测器用于检测环境数据;
[0008]
翻转系统,其包括翻转电机、第一翻转杆、第二翻转杆和支撑杆,所述翻转电机固定设置在所述底座上,所述监测箱固定设置在所述支撑杆的一端;所述翻转电机的输出端传动连接至所述第一翻转杆的一端,所述第一翻转杆的另一端铰接至所述支撑杆上;所述第二翻转杆的一端铰接至所述底座、另一端铰接至所述支撑杆;其中,
[0009]
所述监测箱至少具有第一工作状态和第二工作状态;
[0010]
当处于第一工作状态时,所述监测箱的开口向上,所述第一翻转杆与所述支撑杆的铰接点位于所述第二翻转杆与所述支撑杆的铰接点的下方;
[0011]
当处于第二工作状态时,所述监测箱的开口向下,所述第一翻转杆与所述支撑杆的铰接点位于所述第二翻转杆与所述支撑杆的铰接点的上方。
[0012]
更优地,还包括调整装置,其包括防护罩和位于所述防护罩内的调整器,所述防护罩固定设置在所述支撑杆的一端;
[0013]
所述调整器包括调整电机和套筒,所述调整电机固定设置在所述防护罩内,所述调整电机驱动连接至所述套筒,用于带动所述套筒转动,所述监测箱固定设置在所述套筒远离所述调整电机的一端。
[0014]
更优地,所述调整器还包括主动轮、从动轮、皮带、传动杆、第一锥齿轮、第二锥齿轮、转轮、驱动杆、提升轮和第一切换装置;
[0015]
所述调整电机驱动连接至所述主动轮,所述从动轮可转动地设置在所述防护罩
内,所述主动轮和所述从动轮之间通过所述皮带连接;所述传动杆的一端固定连接至所述从动轮、另一端固定连接至所述第一锥齿轮,所述第一锥齿轮与所述第二锥齿轮相啮合,所述第二锥齿轮同轴固定连接至所述转轮,所述转轮可转动地设置在所述防护罩内,所述驱动杆固定连接至所述转轮,所述提升轮可转动地设置在所述驱动杆上,所述套筒上固定设置有第一挡板和第二挡板,所述提升轮位于所述第一挡板和所述第二挡板之间,所述转轮转动时,带动所述提升轮进而带动所述第一挡板和/或所述第二挡板移动;
[0016]
所述第一切换装置连接在所述套筒与所述调整电机之间,所述第一切换装置至少具有第一工作状态和第二工作状态;当处于第一工作状态时,所述套筒与所述调整电机驱动连接,所述调整电机能够带动所述套筒转动;当处于第二工作状态时,所述套筒与所述调整电机相脱离,所述驱动电机不会带动所述套筒转动。
[0017]
更优地,所述第一切换装置包括第一切换杆、第一电磁铁、第一处理器和第一无线收发模块,所述第一切换杆的上下两端分别同轴固定设置有第二花键轴a和第一花键轴a,所述主动轮上同轴开设有第一花键槽a,所述第一花键轴a与所述第一花键槽a相配合,所述套筒内同轴开设有第一收纳孔,所述第一收纳孔的上部开设有第二花键槽a,所述第二花键轴a与所述第二花键槽a相配合,所述第一收纳孔的直径大于所述第二花键轴a的外径;所述第一电磁铁、所述第一处理和所述第一无线收发模块均固定设置在所述第一收纳孔内;所述第一电磁铁和所述第一无线收发模块均信号连接至所述第一处理器;
[0018]
所述第一切换杆至少具有第一工作状态和第二工作状态:
[0019]
当处于第一工作状态时,所述第一花键轴a与所述第一华键槽a相配合,所述第一电磁铁呈断电状态,所述第二花键轴a与所述第二花键槽a相脱离,所述第一切换杆转动时,所述套筒不发生转动;
[0020]
当处于第二工作状态时,所述第一花键轴a与所述第一花键槽a相配合,所述第一电磁铁呈通电状态,所述第二花键轴a与所述第二花键槽a相配合,所述第一切换杆转动时,所述套筒同步转动。
[0021]
更优地,所述传动杆包括第一杆段和第二杆段,所述第一杆段的下端传动连接至所述从动轮,所述第二杆段的上端传动连接至所述第一锥齿轮;
[0022]
所述第二切换装置包括第二切换杆、第二电磁铁、第二处理器和第二无线收发模块,所述第二切换杆的上下两端分别同轴固定设置有第二花键轴b和第一花键轴b,所述第一杆段的上端同轴开设有第一花键槽b,所述第一花键轴b与所述第一花键槽b相配合,所述第二杆段的下端同轴开设有第二收纳孔,所述第二收纳孔的上部开设有第二花键槽b,所述第二花键轴b与所述第二花键槽b相配合,所述第二收纳孔的直径大于所述第二花键轴b的外径;所述第二电磁铁、所述第二处理和所述第二无线收发模块均固定设置在所述第二收纳孔内;所述第二电磁铁和所述第二无线收发模块均信号连接至所述第二处理器;
[0023]
所述第二切换杆至少具有第一工作状态和第二工作状态:
[0024]
当处于第一工作状态时,所述第一花键轴b与所述第一花键槽b相配合,所述第二电磁铁呈断电状态,所述第二花键轴b与所述第二花键槽b相脱离,所述第二切换杆转动时,所述第二杆段不发生转动;
[0025]
当处于第二工作状态时,所述第一花键轴b与所述第一花键槽b相配合,所述第一电磁铁呈通电状态,所述第二花键轴b与所述第二花键槽b相配合,所述第二切换杆转动时,
所述第二杆段同步转动。
[0026]
更优地,所述监测器至少包括摄像装置、温度传感器、湿度传感器和粉尘传感器中的一种或多种。
[0027]
本发明提供一种基于计算机远程控制的农业环境监测装置,通过翻转系统可以有效的调整监测箱的位置和相对高度,可以根据需要监测不同高度上的环境数据;通过翻转电机可以带动第一翻转杆转动,在第二翻转杆和支撑杆的配合下,可以带动监测箱的上端口封盖在底座上,从而可以保护监测箱内的监测器,避免监测器损坏。
附图说明
[0028]
图1为本发明提供的一种基于计算机远程控制的农业环境监测装置的结构示意图;
[0029]
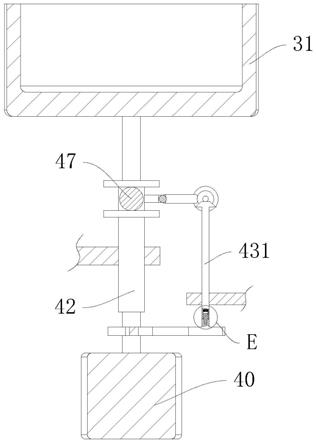
图2为图1中调整装置的结构示意图一(隐藏防护罩);
[0030]
图3为图2中a处局部放大图;
[0031]
图4为图1中调整装置的结构示意图二;
[0032]
图5为图4中c-c剖视图;
[0033]
图6为图5中d处局部放大图;
[0034]
图7为图4中b-b剖视图;
[0035]
图8为图7中e处局部放大图;
[0036]
图9为本发明提供的一种基于计算机远程控制的农业环境监测装置的系统原理图一;
[0037]
图10为本发明提供的一种基于计算机远程控制的农业环境监测装置的系统原理图二。
[0038]
附图标记说明:
[0039]
10、底座,20、翻转电机,21、第一翻转杆,22、第二翻转杆,23、支撑杆,30、防护罩,31、监测箱,40、调整电机,41、主动轮,411、皮带,42、套筒,421、第一挡板,422、第二挡板,423、第一收纳孔,43、从动轮,431、传动杆,44、第一锥齿轮,45、第二锥齿轮,451、转轮,46、驱动杆,47、提升轮,50、第一切换杆,501、第一花键轴a,502、第二花键轴a,60、第一电磁铁,601、第一处理器,70、第二切换杆,71、第一花键轴b,72、第二花键轴b,73、第二电磁铁。
具体实施方式
[0040]
下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
[0041]
实施例一:
[0042]
如图1所示,本发明实施例提供的一种基于计算机远程控制的农业环境监测装置,包括底座10、监测系统和翻转系统;
[0043]
底座10用于起到支撑作用,方便放置在农田等待监测区域;
[0044]
监测系统包括一上部开口的监测箱31,监测箱31呈圆柱形,上部开口用于接收雨水、接触空气、接收花粉等,监测箱31内设置有监测器,监测器至少包括摄像装置、温度传感器、湿度传感器和粉尘传感器,摄像装置用于获取环境图像信息,通过网络传输,实现远程
监控,监测器用于检测环境数据;
[0045]
翻转系统包括翻转电机20、第一翻转杆21、第二翻转杆22和支撑杆23,翻转电机20固定设置在底座10上,监测箱31固定设置在支撑杆23的一端;翻转电机20的输出端传动连接至第一翻转杆21的一端,用于带动第一翻转杆21转动,第一翻转杆21的另一端铰接至支撑杆23上;第二翻转杆22的一端铰接至底座10、另一端铰接至支撑杆23;其中,
[0046]
监测箱31至少具有第一工作状态和第二工作状态;
[0047]
当处于第一工作状态时,监测箱31处于监测状态,监测箱31的开口向上,第一翻转杆21与支撑杆23的铰接点位于第二翻转杆22与支撑杆23的铰接点的下方,此时监测箱31内的监测器暴露在周围环境中,实时监测,通过无线网络传输至远程监测室,其中远程网络传输为现有技术,不再赘述;
[0048]
当处于第二工作状态时,监测箱31处于防护状态,监测箱31的开口向下,贴紧在底座10上,第一翻转杆21与支撑杆23的铰接点位于第二翻转杆22与支撑杆23的铰接点的上方,此时监测箱31和底座10形成一密闭结构,可以防止酸雨、冰雹等侵蚀监测器。
[0049]
其中,翻转电机20连接有控制处理器,控制处理器通过无线收发装置或无线通信网络与监测室通信。
[0050]
工作时,远程监测室通过监测器获取环境信息,当出现酸雨或冰雹等容易破坏监测器的环境产生时,远程发送指令,通过控制处理器控制翻转电机20转动,翻转电机20带动第一翻转杆21转动,第一翻转杆21会带动支撑杆23动作拉动第二翻转杆22同步转动,第一翻转杆21较第二翻转杆22短,转动到一定角度时,监测箱31在第一翻转杆21和第二翻转杆22的共同作用下,产生角度偏转,直至监测箱31的上端开口封盖在底座10上;当需要调整至检测状态时,只需远程控制,使翻转电机20反向转动即可。
[0051]
实施例二:
[0052]
在环境数据监测时,需要根据植物不同生长周期、不同的植物品种株高等情况调整监测器的高度以及角度,尤其是图像数据常常需要调整视角和高度等,因此本实施例还包括调整装置,其包括防护罩30和位于防护罩30内的调整器,防护罩30固定设置在支撑杆23的一端;
[0053]
调整器包括调整电机40和套筒42,调整电机40固定设置在防护罩30内,调整电机40驱动连接至套筒42,用于带动套筒42转动,监测箱31固定设置在套筒42远离调整电机40的一端。
[0054]
实施例三:
[0055]
在实施例二中,仅能调整角度无法调整高度,因此在实施例二的基础上,如图2至图6所示,本实施例中调整器还包括主动轮41、从动轮43、皮带411、传动杆431、第一锥齿轮44、第二锥齿轮45、转轮451、驱动杆46、提升轮47和第一切换装置;
[0056]
调整电机40驱动连接至主动轮41,从动轮43可转动地设置在防护罩30内,主动轮41和从动轮43之间通过皮带411连接;传动杆431的一端固定连接至从动轮43、另一端固定连接至第一锥齿轮44,第一锥齿轮44与第二锥齿轮45相啮合,第二锥齿轮45同轴固定连接至转轮451,转轮451可转动地设置在防护罩30内,驱动杆46固定连接至转轮451,提升轮47可转动地设置在驱动杆46上,其中,驱动杆46呈c字形,提升轮47为两个,分别可转动地连接在驱动杆46的两端,驱动杆46的中部固定连接至转轮451,套筒42上固定设置有第一挡板
421和第二挡板422,提升轮47位于第一挡板421和第二挡板422之间,转轮451转动时,带动提升轮47进而带动第一挡板421和/或第二挡板422移动;
[0057]
第一切换装置连接在套筒42与调整电机40之间,第一切换装置至少具有第一工作状态和第二工作状态;当处于第一工作状态时,套筒42与调整电机40驱动连接,调整电机40能够带动套筒42转动;当处于第二工作状态时,套筒42与调整电机40相脱离,驱动电机不会带动套筒42转动。
[0058]
具体地,第一切换装置包括第一切换杆50、第一电磁铁60、第一处理器601和第一无线收发模块,第一切换杆50的上下两端分别同轴固定设置有第二花键轴a502和第一花键轴a501,主动轮41上同轴开设有第一花键槽a,第一花键轴a501与第一花键槽a相配合,套筒42内同轴开设有第一收纳孔423,第一收纳孔423的上部开设有第二花键槽a,第二花键轴a502与第二花键槽a相配合,第一收纳孔423的直径大于第二花键轴a502的外径;第一电磁铁60、第一处理和第一无线收发模块均固定设置在第一收纳孔423内;如图9所示,第一电磁铁60、第一无线收发模块和调整电机40均信号连接至第一处理器601;其中,第一切换杆50为磁吸性材料制成;
[0059]
第一切换杆50至少具有第一工作状态和第二工作状态:
[0060]
当处于第一工作状态时,第一花键轴a501的下端位于第一花键槽a内,与第一花键槽a相配合,第一电磁铁60呈断电状态,第一花键轴a501在重力作用下位于低位,第二花键轴a502与第二花键槽a相错位,第二花键轴a502的上端位于第一收纳孔423内,第一切换杆50转动时,第一收纳孔423的直径大于第二花键轴a502的外径,因此套筒42不发生转动;
[0061]
当处于第二工作状态时,第一花键轴a501与第一花键槽a相配合,第一电磁铁60呈通电状态,第一电磁铁60通电时吸附第二花键轴a502,第二花键轴a502带动第一切换杆50上移,第二花键轴a502与第二花键槽a相啮合,第一切换杆50转动时,通过第二花键轴a502和第二花键槽a配合带动套筒42同步转动。
[0062]
进一步地,如图7和图8所示,传动杆431包括第一杆段和第二杆段,第一杆段的下端传动连接至从动轮43,第二杆段的上端传动连接至第一锥齿轮44;
[0063]
第二切换装置包括第二切换杆70、第二电磁铁73、第二处理器和第二无线收发模块,第二切换杆70的上下两端分别同轴固定设置有第二花键轴b72和第一花键轴b71,第一杆段的上端同轴开设有第一花键槽b,第一花键轴b71与第一花键槽b相配合,第二杆段的下端同轴开设有第二收纳孔,第二收纳孔的上部开设有第二花键槽b,第二花键轴b72与第二花键槽b相配合,第二收纳孔的直径大于第二花键轴b72的外径;第二电磁铁73、第二处理和第二无线收发模块均固定设置在第二收纳孔内;如图10所示,第二电磁铁73和第二无线收发模块均信号连接至第二处理器;
[0064]
第二切换杆70至少具有第一工作状态和第二工作状态:
[0065]
当处于第一工作状态时,第一花键轴b71与第一花键槽b相配合,第二电磁铁73呈断电状态,第二花键轴b72与第二花键槽b相脱离,第二切换杆70转动时,第二杆段不发生转动;
[0066]
当处于第二工作状态时,第一花键轴b71与第一花键槽b相配合,第一电磁铁60呈通电状态,第二花键轴b72与第二花键槽b相配合,第二切换杆70转动时,第二杆段同步转动。
[0067]
工作时,当仅需要调整角度时,远程发送第一信号至第一无线收发模块,第一无线收发模块将第一信号传递至第一处理器601,第一处理器601控制调整电机40转动同时控制第一电磁铁60通电,第一电磁铁60吸附第二花键轴a502向上运动,使第二花键轴a502与第二花键槽a相配合,调整电机40转动时,通过第一花键槽a带动第一花键轴a501转动,进而通过第一切换杆50带动第二花键轴a502转动,第二花键轴a502带动套筒42转动;同时发送第二信号至第二无线收发模块,第二无线收发模块将第二信号传递至第二处理器,第二处理器控制第二电磁铁73断电,第二电磁铁73断电时,第二切换杆70在重力作用下处于低位,使第二花键轴b72与第二花键槽b相脱离,从动轮43转动不会带动传动杆431转动;
[0068]
当仅需要调整高度时,远程发送第三信号至第一无线收发模块,第一无线收发模块将第三信号传递至第一处理器601,第一处理器601控制调整电机40转动同时控制第一电磁铁60断电,第一切换杆50在重力作用下下移,第二花键轴a502与第二花键槽a相脱离,调整电机40转动时,套筒42不发生转动;同时发送第四信号至第二无线收发模块,第二无线收发模块将第二信号传递至第二处理器,第二处理器控制第二电磁铁73通电,第二电磁铁73通电时,第二切换杆70被第二电磁铁73吸附上移,使第二花键轴b72与第二花键槽b相配合,从动轮43转动会带动第一杆段转动,第二移杆通过第二切换杆70带动第二杆段转动,第二杆段带动第一锥齿轮44进而带动第二锥齿轮45转动,第二锥齿轮45带动转轮451进而带动驱动杆46转动,驱动杆46带动提升轮47移动,提升轮47会带动第一挡板421或第二挡板422运动从而实现对套筒42的上拉和下压,实现高度的调节。
[0069]
当需要同时调整高度和角度时,只需发送信号控制第一电磁铁60和第二电磁铁73同时通电,控制调整电机40启动,即可实现角度和高度的同时调节。
[0070]
以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1