一种感应检测开关的防干扰装置及控制方法与流程
[0001]
本发明涉及加工领域,特别是涉及一种感应检测开关的防干扰装置及控制方法。
背景技术:
[0002]
家具是指人类维持正常生活、从事生产实践和开展社会活动必不可少的器具设施大类。家具也跟随时代的脚步不断发展创新,到如今门类繁多,用料各异,品种齐全,用途不一。是建立工作生活空间的重要基础。家具是由材料、结构、外观形式和功能四种因素组成,其中功能是先导,是推动家具发展的动力;结构是主干,是实现功能的基础。这四种因素互相联系,又互相制约。由于家具是为了满足人们一定的物质需求和使用目的而设计与制作的,因此家具还具有材料和外观形式方面的因素。
[0003]
在家具的加工设备中会大量应用到感应检测开关,家具加工会产生大量的灰尘,所述灰尘会污染感应检测开关,不可避免有粉尘沉降在设备的某些磁感应检测开关的检测面上,当累积一定量以后,会导致检测开关输出信号,从而引起设备相应误动作。
技术实现要素:
[0004]
本发明的发明目的在于:针对上述存在的问题,提供一种感应检测开关的防干扰装置及控制方法,解决了传感器因为受到杂质干扰二产生误动作的问题,提高了设备的可靠性和安全性。
[0005]
本发明采用的技术方案如下:
[0006]
一种感应检测开关的防干扰装置,包括非接触式检测开关,所述非接触式检测开关的顶部设置有检测探头,所述检测探头的侧面设置有杂物检测模块,所述杂物检测模块用于检测杂物是否落于检测探头上;所述检测探头的侧面设置有杂物祛除装置,所述杂物祛除装置、杂物检测模块、检测探头通过电缆连接有控制器。
[0007]
进一步地,本发明开了一种感应检测开关的防干扰装置的优选结构,所述杂物祛除装置包括吹气嘴,所述吹气嘴通过气源管道连接有气源;所述气源管道上设置有电磁阀,所述电磁阀通过电缆与所述控制器电连接。
[0008]
进一步地,所述控制器包括中央处理单元和存储器,所述中央处理单元和存储器信号相连,所述存储器中设置有杂质识别模块。
[0009]
进一步地,包括非接触式检测开关安装板,所述非接触式检测开关通过可拆卸固定组件可拆卸连接在非接触式检测开关安装板上;所述非接触式检测开关安装板上设置有防干扰装置安装板,所述吹气嘴和杂物检测模块可拆卸连接在所述防干扰装置安装板上。
[0010]
进一步地,所述防干扰装置安装板包括连接板,所述连接板通过固定装置可拆卸连接在所述非接触式检测开关安装板上;所述连接板上设置有吹气嘴安装部、杂物检测模块安装部;所述吹气嘴安装部与所述吹气嘴可拆卸连接,所述杂物检测模块安装部与所述杂物检测模块可拆卸连接。
[0011]
进一步地,所述吹气嘴的气流喷射方向正对着所述检测探头上,所述吹气嘴与所
述检测探头相互垂直设置,所述杂物检测模块正对着所述检测探头,所述杂物检测模块与所述吹气嘴、所述检测探头交错设置。
[0012]
进一步地,所述杂物检测模块为摄像头。
[0013]
一种感应检测开关的防干扰装置的控制方法,所述杂质识别模块包括图像预处理模块,灰尘杂质图像识别模块,检测探头数据分析模块;所述检测探头数据分析模块的输入端与灰尘杂质图像识别模块的结果输出端同步信号相连,所述所述灰尘杂质图像识别模块为卷积神经网络模型,所述检测探头数据分析模块为时序人工智能模型;控制方法包括以下步骤:
[0014]
s1.将设备安装在机器上并人工调试,让设备在人工监督的环境下正常运行若干分钟,设备运行过程中杂物检测模块拍摄若干图像数据,经过图像预处理模块与处理后,人工标注灰尘过多导致非接触式检测开关误触发的图像,这些图像数据和标注数据都输入灰尘杂质图像识别模块,实现对灰尘杂质图像识别模块的训练;
[0015]
s2.同时检测探头数据分析模块同步收集检测探头检测到的数据,并将出现灰尘过多导致非接触式检测开关误触发的图像的时间数据输入到检测探头数据分析模块中,实现对检测探头数据分析模块的训练;
[0016]
s3.训练完成后杂质识别模块自主运行,杂物检测模块每秒拍摄若干图像,所述灰尘杂质图像识别模块根据训练出来的参数处理拍摄并经过图像预处理模块处理后的图像数据并得出灰尘或杂物是否过多的判断,当判断的结果是灰尘过多时,控制器控制电磁阀打开一段时间,吹气嘴喷出气体吹掉灰尘;
[0017]
s4.同时,检测探头数据分析模块分析检测探头的实时数据和并根据预训练的参数预判断是否为灰尘过多,当检测探头数据分析模块判断出检测探头的数据异常,存在灰尘过多时,控制器控制电磁阀打开一段时间,吹气嘴喷出气体吹掉灰尘;
[0018]
s5.灰尘杂质图像识别模块的判断结果用于改进检测探头数据分析模块的参数,所述检测探头数据分析模块的判断结果用于改进灰尘杂质图像识别模块的参数。
[0019]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0020]
1.通过采用本技术方案,通过设置吹气装置,能将检测开关上的灰尘吹掉,防止杂物影响检测开关而产生误触,提高设备的准确性,确保检测开关进行有效检测;检测开关类型包括光电漫反射检测、光电反射板检测、电容感应检测等非接触式感应类型开关。
[0021]
2.通过灰尘杂质图像识别模块和探头数据分析模块并行判断设备是否收到干扰,能大大提高设备的精度,同时灰尘杂质图像识别模块和探头数据分析模块相互促进学习,自动改进模型参数,能大大提高整个设备的精度,提高设备的可靠性。
附图说明
[0022]
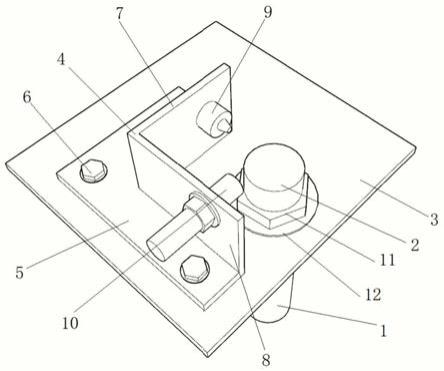
图1是本发明结构示意图;
[0023]
图中标记:1是非接触式检测开关,2是检测探头,3是非接触式检测开关安装板,4是防干扰装置安装板,5是连接板,6是固定装置,7是吹气嘴安装部,8是杂物检测模块安装部,9是吹气嘴,10是杂物检测模块, 11是安装螺丝,12是垫片。
具体实施方式
[0024]
下面结合附图,对本发明作详细的说明。
[0025]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0026]
实施例1:
[0027]
如附图1所示,本发明开了一种感应检测开关的防干扰装置的优选实施方式,包括非接触式检测开关1,包括非接触式检测开关安装板3,所述非接触式检测开关1通过可拆卸固定组件可拆卸连接在非接触式检测开关安装板3上。所述非接触式检测开关安装板3上设置有防干扰装置安装板4,所述吹气嘴9和杂物检测模块10可拆卸连接在所述防干扰装置安装板4上。
[0028]
所述非接触式检测开关1的顶部设置有检测探头2,所述检测探头2 的侧面设置有杂物检测模块10,所述杂物检测模块10用于检测杂物是否落于检测探头2上;所述检测探头2的侧面设置有吹气嘴9,所述杂物检测模块10、检测探头2通过电缆连接有控制器。所述杂物祛除装置为,所述吹气嘴9通过气源管道连接有气源;所述气源管道上设置有电磁阀,所述电磁阀通过电缆与所述控制器电连接。控制器包括中央处理单元和存储器,所述中央处理单元和存储器信号相连,所述存储器中设置有杂质识别模块。
[0029]
所述防干扰装置安装板4包括连接板5,所述连接板5通过固定装置6 可拆卸连接在所述非接触式检测开关安装板3上;所述连接板5上设置有吹气嘴安装部7、杂物检测模块安装部8;所述吹气嘴安装部7与所述吹气嘴9可拆卸连接,所述杂物检测模块安装部8与所述杂物检测模块10可拆卸连接。所述吹气嘴9的气流喷射方向正对着所述检测探头2上,所述吹气嘴9与所述检测探头2相互垂直设置,所述杂物检测模块10正对着所述检测探头2,所述杂物检测模块10与所述吹气嘴9、所述检测探头2交错设置。所述杂物检测模块10为摄像头。
[0030]
具体运行过程,设备设置定时吹气,控制器的中央处理单元为plc控制器;设备plc控制器按设定时间输出信号开启电磁阀,包含开启时间,停止时间等参数,吹气嘴9吹出的压缩空气将磁感应开关检测面上的粉尘、碎屑吹走,从而避免有磁感应检测开关产生误信号,确保检测开关进行有效检测。
[0031]
同时,杂物检测模块10将检测到的信号发送给plc控制器,plc控制器判断监测到有杂物时,立即启动电磁阀进行紧急吹气处理。当多次启动电磁阀吹气发现仍然有探测模块的杂物输入信号,这时只能系统报警提示,需要人工干预检查处理。平时探测模块无杂物输入信号时,只需定时启动电磁阀进行吹尘清洁操作。
[0032]
这样,通过设置本装置,通过设置吹气装置,能将检测开关上的灰尘吹掉,防止杂物影响检测开关而产生误触,提高设备的准确性,确保检测开关进行有效检测。
[0033]
实施例2:
[0034]
在实施例1的基础上,本发明公开了一种感应检测开关的防干扰装置的控制方法,所述杂质识别模块包括图像预处理模块,灰尘杂质图像识别模块,检测探头数据分析模块;所述检测探头数据分析模块的输入端与灰尘杂质图像识别模块的结果输出端同步信号相连,所述所述灰尘杂质图像识别模块为卷积神经网络模型,所述检测探头数据分析模块为
时序人工智能模型;控制方法包括以下步骤:
[0035]
s1.将设备安装在机器上并人工调试,让设备在人工监督的环境下正常运行若干分钟,设备运行过程中杂物检测模块10拍摄若干图像数据,经过图像预处理模块与处理后,人工标注灰尘过多导致非接触式检测开关1误触发的图像,这些图像数据和标注数据都输入灰尘杂质图像识别模块,实现对灰尘杂质图像识别模块的训练;
[0036]
s2.同时检测探头数据分析模块同步收集检测探头2检测到的数据,并将出现灰尘过多导致非接触式检测开关1误触发的图像的时间数据输入到检测探头数据分析模块中,实现对检测探头数据分析模块的训练;
[0037]
s3.训练完成后杂质识别模块自主运行,杂物检测模块10每秒拍摄若干图像,所述灰尘杂质图像识别模块根据训练出来的参数处理拍摄并经过图像预处理模块处理后的图像数据并得出灰尘或杂物是否过多的判断,当判断的结果是灰尘过多时,控制器控制电磁阀打开一段时间,吹气嘴9喷出气体吹掉灰尘;
[0038]
s4.同时,检测探头数据分析模块分析检测探头2的实时数据和并根据预训练的参数预判断是否为灰尘过多,当检测探头数据分析模块判断出检测探头2的数据异常,存在灰尘过多时,控制器控制电磁阀打开一段时间,吹气嘴9喷出气体吹掉灰尘;
[0039]
s5.灰尘杂质图像识别模块的判断结果用于改进检测探头数据分析模块的参数,所述检测探头数据分析模块的判断结果用于改进灰尘杂质图像识别模块的参数。
[0040]
通过设置灰尘杂质图像识别模块用于识别判断杂质,通过检测探头数据分析模块预测是否有杂质落在检测探头2上,导致信号异常,通过灰尘杂质图像识别模块和探头数据分析模块并行判断设备是否收到干扰,能大大提高设备的精度,同时灰尘杂质图像识别模块和探头数据分析模块相互促进学习,自动改进模型参数,能大大提高整个设备的精度,提高设备的可靠性。
[0041]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1