一种基于无人机航拍与卫星遥感融合的影像校正方法与流程
[0001]
本发明属于无人机相片校正领域,具体的说是一种基于无人机航拍与卫星遥感融合的影像校正方法。
背景技术:
[0002]
卫星遥感影像由于其空间分辨率达不到准确获取输变电工程施工扰动面积和环水保措施(如挡土墙、排水沟、基坑盖板、废水沉淀池)的要求,需要结合无人机影像来获取这些信息,但目前无人机独自工作无法实现准确定位,所获取的图像不携带地理空间坐标信息,无法得到环水保监管所需的矢量数据。为了有效获取输变电工程线路矢量信息(获得精准施工扰动面积、施工道路长度和宽度以及环水保措施实施情况),通常有以下几种技术手段:通过地面控制点计算无人机影像中目标点的地理空间坐标、无人机携带gps(global positioning system)进行定位和导航、引入了rtk(real time kinematic)技术和ppk(post-processing kinematic)技术。
[0003]
现有技术主要存在如下缺点:
[0004]
1)对于线路较长的电网工程,地面控制点的数量要多、分布要广,需要地面控制点的质量要高。输变电工程线路长、跨度大、穿越群山峻岭,地面控制点外业测量十分困难,给地面控制点的数量、质量和分布都带来了不小的挑战,且计算量较大,实时性受到制约;工作性能受地形影响,因此在输变电工程中,选取地面控制点作为基础,计算无人机影像的地理空间坐标的方法执行起来较为困难。
[0005]
2)gps定位器定位偏差较大。一是因为gps易受电磁干扰,gps系统接收机的工作受飞行器机动的影响,比如gps的信号更新频率一般在1hz~2hz,如果飞行器需要快速更新导航信息,单独搭载gps系统就不能满足飞行器更新信息的需要;二是信号为题,尤其是在山区、沙漠地区及无人区,基站较为稀少,无法接收到卫星信号或信号弱,导致定位器产生网络延迟,致使定位器没有准确定位设定航线中杆塔位置,使得定位偏离了实际位置。
[0006]
3)无人机飞控的gps单点定位精度差,受卫星轨道误差,时钟同步误差及信号传播误差等因素的影响,精度只能达到米级。
[0007]
4)rtk虽然可提供实时该精度的位置信息,但是目前在无人机的应用上还存在很大的技术难题,一是rtk架设基准站一般选择地势较高的位置,对于输变电工程而言,周边多为山丘,作业人员无法到达。二是rtk作业受通讯电台的限制,作业距离不能超过10公里,需要网络信号全覆盖。然而输变电工程线路较长,无人机飞行距离通常大于10公里,沿途地势高低起伏,山丘众多,无法满足信号全覆盖的要求。三是成本较高,搭载rtk的无人机价格是独立无人机的3-4倍。
技术实现要素:
[0008]
本发明是为了解决上述现有技术存在的不足之处,提出一种基于无人机航拍与卫星遥感影像融合的输变电工程环水保信息校正方法,以期能实现反算无人机影像坐标原
点,逐级迭代进行自动计算控制点误差并累计修正,从而能提高校正精度和效率,降低成本。
[0009]
本发明为达到上述发明目的,采用如下技术方案:
[0010]
本发明一种基于无人机航拍与卫星遥感融合的影像校正方法的特点包括如下步骤:
[0011]
步骤1、获取n张无人机在输变电杆塔区所拍摄的不同方向上的相片并利用自适应相机模型拟合方法进行对齐处理,得到带有空间方向的相片集合;
[0012]
步骤2、拼接n张带有空间方向的相片并生成相片网格;计算所述相片网格中每个像素的高程,从而得到无人机正射纠正影像p;
[0013]
步骤3、卫星遥感影像预处理;
[0014]
步骤3.1、获取在所述输变电杆塔区的一幅卫星遥感影像,并将所述卫星影像中的全色影像进行辐射定标处理,得到全色定标影像,对所述全色定标影像进行正射纠正,得到全色正射影像;
[0015]
步骤3.2、将所述卫星影像中的多光谱影像进行辐射定标处理,得到多光谱定标影像;对所述多光谱定标影像进行进行大气校正,得到含有真实地物反射值的卫星影像;对所述含有真实地物反射值的卫星影像进行正射纠正,得到正射多光谱影像;
[0016]
步骤4、利用混合像元法将所述全色正射影像和正射多光谱影像进行融合,得到融合后的卫星遥感影像m;
[0017]
步骤5、构建并更新样本库c;
[0018]
从所述无人机正射纠正影像p和融合后的卫星遥感影像m中分别获取相同的特征点,并用于构建样本库c,根据所述样本库c中的特征点,分别对所述无人机正射纠正影像p和融合后的卫星遥感影像m进行遍历,找到特征点在所述无人机正射纠正影像p和融合后的卫星遥感影像m中的若干个位置坐标点,分别计算特征点在所述无人机正射纠正影像p和融合后的卫星遥感影像m中所对应的各个位置坐标点之间的欧式距离,并判断所述欧式距离是否满足阈值,当满足阈值时,表示相对应的位置坐标点为校正点,并加入所述样本库c中;
[0019]
步骤6、以融合后的卫星遥感影像m为基准影像,利用所述样本库c中卫星遥感影像m所对应的特征点和校正点的位置坐标,利用二次多项式对所述无人机正射纠正影像p所对应的特征点和校正点的位置坐标进行校正,得到校正后的无人机影像p
re
。
[0020]
与现有技术相比,本发明的有益效果在于:
[0021]
1、本发明基于融合后的卫星遥感影像,构建和更新样本库,利用样本库中特征点与校正点校正无人机正射纠正影像,获取了准确的输变电工程环水保坐标信息,避免了外业布设地面控制点带来的困难,无需在无人机上搭载gps和rtk等设备,从而减轻了无人机的飞行压力,降低了成本。
[0022]
2、为使校正方法更加准确,本发明引入欧式距离判断遍历特征点是否可以参与校正,从而实现了正确校正无人机正射影像的目的。
附图说明
[0023]
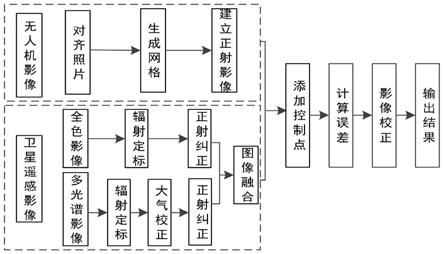
图1为本发明方法流程框图;
[0024]
图2a为本发明无人机正射影像纠正点样本库;
[0025]
图2b为本发明卫星遥感影像纠正点样本库。
具体实施方式
[0026]
在本实施例中,一种基于无人机航拍与卫星遥感融合的影像校正方法是针对利用卫星遥感影像获取特征点坐标,从而实现校正无人机影像的过程。先对无人机相片进行对齐处理,得到带有空间方向的相片集合,对相片集合进行拼接得到完整的地物信息影像,计算影像中每个像素的高程,通过正射纠正得到正射影像;然后对卫星遥感影像进行预处理得到卫星遥感正射影像。对上述无人机正射影像与卫星遥感正射影像构建样本库,并通过条件概率公式搜寻整幅影像中符合要求的校正点进行卫星遥感影像对无人机正射影像的校正,从而获得包含地理空间坐标信息切高空间分辨率的输变电工程杆塔区影像。具体的说,如图1所示,该影像校正方法的实现步骤如下:
[0027]
步骤1、获取n张无人机在输变电杆塔区所拍摄的不同方向上的相片并利用自适应相机模型拟合方法进行对齐处理:首先在n张照片中寻找重叠区域进行边缘、角点匹配并进行跟踪处理,然后根据跟踪到的初始重叠对象构建三维空间点,得到n张相片的初始空间位置,最后利用光束平差法进行非线性优化相片的空间分布,从而得到带有空间方向的相片集合。
[0028]
步骤2、拼接n张带有空间方向的相片并利用八叉树结构算法生成相片六面体网格,删除不需要的六面体重叠区,为了网格与实体近似,需要先对六面体网格进行表面分析,从而得到更加贴近实体的相片网格;计算相片网格中每个像素的高程,将高程信息分配到相片网格之前的空间方向上,这样就可将相片网格从不同空间方向转换到正射方向,从而得到无人机正射纠正影像p;
[0029]
步骤3、卫星遥感影像预处理;
[0030]
步骤3.1、获取在输变电杆塔区的一幅卫星遥感影像,并将卫星影像中的全色影像进行辐射定标处理,得到全色定标影像,对全色定标影像进行正射纠正,得到全色正射影像:
[0031]
l=gain
×
dn+bias
ꢀꢀ
(1)
[0032][0033][0034]
式(1)中,gain和bias为卫星影像偏差参数,分别为卫星影像的增益和偏置,dn为所获取的原始卫星影像像素灰度值,l为辐射定标得到的全色卫星影像像素的辐射亮度值;
[0035]
式(2)、式(3)中,a
ij
、b
ij
分别为x坐标和y坐标的变化公式的系数,x、y为定标卫星影像像素的坐标,x、y为正射纠正后卫星影像像素的坐标。
[0036]
步骤3.2、将卫星影像中的多光谱影像利用式(1)进行辐射定标处理,得到多光谱定标影像;对多光谱定标影像利用式(4)进行大气校正,得到含有真实地物反射值的卫星影像:
[0037][0038]
l
a
是根据大气物理模型估计得到的大气程辐射值,也就是由于大气反射作用到卫星影像中所获得的辐射亮度值,τ
va
同样根据大气物理模型估计到的地物反射透过大气层的比例,称为透过率,l
o
是经过大气校正后的卫星影像真实地物反射值。
[0039]
对含有真实地物反射值的卫星影像利用式(2)、式(3)进行正射纠正,得到正射多光谱影像。
[0040]
步骤4、利用式(5)所示的混合像元法将全色正射影像和正射多光谱影像进行融合,得到融合后的卫星遥感影像m的辐射亮度值l
m
:
[0041][0042]
式(5)中l1、l2、l3为正射多光谱影像中三个波段的辐射亮度值,l
h
为全色正射影像的辐射亮度值,通过混合像元模型先标准化多光谱正射影像,再乘以全色正射影像,以增强影像的色彩度、空间分辨率信息。
[0043]
步骤5、构建并更新样本库c;
[0044]
从无人机正射纠正影像p和融合后的卫星遥感影像m中分别获取相同的特征点,并用于构建样本库c,根据样本库c中的特征点,分别对无人机正射纠正影像p和融合后的卫星遥感影像m进行遍历,找到特征点在无人机正射纠正影像p和融合后的卫星遥感影像m中的若干个位置坐标点,分别计算特征点在无人机正射纠正影像p和融合后的卫星遥感影像m中所对应的各个位置坐标点之间的欧式距离,并判断欧式距离是否满足阈值,当满足阈值时,表示相对应的位置坐标点为校正点,并加入样本库c中,如图2a和图2b所示。利用样本库c中特征点遍历无人机正射影像与为遥感影像中的校正点利用的是概率公式(6):
[0045][0046]
遍历过程中设定有s种特征点,分别用ω1、ω2、
···
、ω
s
来表示,每种特征点发生的概率分别为p(ω1)、p(ω2)、
···
、p(ω
s
);将未纳入到样本库的点设为未知种类的样本z,其条件概率为p(z|ω1)、p(z|ω2)、
···
、p(z|ω
s
)。
[0047]
遍历整幅影像后需要对已经提取完的特征点进行筛选,引入欧式距离来判断特针对选取的准确性,设定l
pi
为无人机正射影像p上第i个特征点的辐射亮度值,l
mi
为卫星遥感影像m上第i个特征点的辐射亮度值,l为无人机正射影像p和卫星遥感影像m之间的欧式距离:
[0048][0049]
通过计算欧式距离,设定阈值,来判断在无人机正射影像p和卫星遥感影像m上的第i个特征点是否为同一地物点。
[0050]
步骤6、以融合后的卫星遥感影像m为基准影像,利用样本库c中卫星遥感影像m所对应的特征点和校正点的位置坐标,引入二次多项式(8)对无人机正射纠正影像p所对应的特征点和校正点的位置坐标进行校正,得到校正后的无人机影像p
re
。
[0051][0052]
式(8)中,a~l为多项式系数,x、y是卫星遥感影像更新样本库c中特征点的坐标,x’、y’是经过校正后的无人机正射影像更新样本库c中特征点的坐标。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1