表面形貌检测系统的制作方法
1.本技术是关于一种表面形貌检测系统,特别是关于一种利用空间光调制器补偿镜头像差的表面形貌检测系统。
背景技术:
2.在产品制造完成后,都会经过一定的测试程序,用来把关产品的质量。一般来说,业界会仰赖人力检查产品的外观是否缺损,或者通过观察产品的外观来判断功能是否正常。但有些产品的结构比较细致,有时实在无法要求人员使用肉眼检查出瑕疵。传统上,业界可能使用摄影机来拍摄产品的外观,通过放大拍摄到的影像,便可以检查产品特定区域的外观。请参阅图1,图1是现有技术中的表面形貌检测系统的示意图。如图1所示,利用传统的表面形貌检测系统9检测待测表面dut时,可以先由光源90发射出光线。光源90发出的光线经由偏振片91之后,会由分光镜92分为朝向物镜93的子光线以及朝向物镜94的子光线。实务上,朝向物镜93的子光线会经由物镜93聚焦之后,再射向待测表面dut,并且物镜93会接收待测表面dut反射回来的光线。
3.另一方面,朝向物镜94的光线会经由物镜94聚焦之后,再射向一个反射镜95,并且物镜94会接收反射镜95反射回来的光线。接着,待测表面dut反射回来的光线和反射镜95反射回来的光线会回到分光镜92,并且射向分光镜92下方的摄影机96。理论上,摄影机96还可以外接计算机(图未示),由计算机分析待测表面dut反射回来的光线和反射镜95反射回来的光线之间的干涉图案,从而计算出待测表面dut的表面形貌。然而,实际的物镜93和物镜94不会完全相同,使得所述干涉图案不一定只关联于待测表面dut的表面形貌,更还可能关联于物镜93和物镜94之间的镜头像差。一般来说,纵使物镜93和物镜94是同批制造出来的,物镜93和物镜94之间还是很可能因为各种不理想的因素而具有镜头像差。当待测表面dut的尺寸非常小的时候,物镜93和物镜94之间的镜头像差会在干涉图案上产生严重干扰,从而让表面形貌的判断受到影响。因此,业界需要一种新的表面形貌检测系统,解决物镜之间的镜头像差问题,以提高表面形貌的测量准确度。
技术实现要素:
4.本技术所要解决的技术问题在于提供一种表面形貌检测系统,加入了空间光调制器以补偿不同物镜之间的镜头像差,从而可以提高表面形貌的测量准确度。
5.本技术提出一种表面形貌检测系统,包含光源、第一分光镜、待测端物镜、参考端物镜、空间光调制器以及检测模块。所述光源用以提供标准光线。所述第一分光镜用以将标准光线分成第一光线与第二光线。所述待测端物镜用以将第一光线投射于待测表面,并接收待测表面反射的测试光线。所述参考端物镜用以将第二光线投射于参考表面,并接收参考表面反射的参考光线。所述空间光调制器用以接收参考光线,并依据修正参数修正参考光线。所述检测模块用以比对测试光线与修正后的参考光线,以计算待测表面的表面形貌。其中修正参数关联于待测端物镜与参考端物镜之间的镜头像差。
6.于一些实施例中,参考光线可以投射至空间光调制器,空间光调制器反射参考光线以得到修正后的该参考光线。在此,表面形貌检测系统更可以包含偏光单元,偏光单元设置于光源与分光镜之间,用以偏振标准光线。此外,第一光线与测试光线的总光程,可以等于第二光线、参考光线与修正后的参考光线的总光程。
7.本技术提出一种表面形貌检测系统,包含光源、第一分光镜、待测端物镜、参考端物镜、空间光调制器以及检测模块。所述光源用以提供标准光线。所述第一分光镜用以将标准光线分成第一光线与第二光线。所述待测端物镜用以将第一光线投射于待测表面,并接收待测表面反射的测试光线。所述空间光调制器用以接收第二光线,并依据修正参数修正第二光线。所述参考端物镜用以将修正后的第二光线投射于参考表面,并接收参考表面反射的参考光线。所述检测模块用以比对测试光线与参考光线,以计算待测表面的表面形貌。其中修正参数关联于待测端物镜与参考端物镜之间的镜头像差。
8.于一些实施例中,第二光线可以投射至空间光调制器,空间光调制器反射第二光线以得到修正后的第二光线。在此,表面形貌检测系统更可以包含偏光单元,偏光单元设置于光源与分光镜之间,用以偏振标准光线。此外,第一光线与测试光线的总光程,可以等于第二光线、修正后的第二光线与参考光线的总光程。
9.本技术提出一种表面形貌检测系统,包含光源、第一分光镜、待测端物镜、参考端物镜、空间光调制器以及检测模块。所述光源用以提供标准光线。所述第一分光镜用以将标准光线分成第一光线与第二光线。所述待测端物镜设置于第一光路径中,用以将第一光线投射于待测表面,并接收待测表面反射的测试光线。所述空间光调制器设置于第二光路径中,用以接收第二光线,并依据修正参数分别修正第二光线与参考光线。所述参考端物镜设置于第二光路径中,用以将修正后的第二光线投射于参考表面,并将参考表面反射的参考光线射入空间光调制器。所述检测模块用以比对测试光线与修正后的参考光线,以计算待测表面的表面形貌。其中修正参数关联于待测端物镜与参考端物镜之间的镜头像差。
10.于一些实施例中,第二光线可以穿透空间光调制器以得到修正后的第二光线,参考光线可以穿透空间光调制器以得到修正后的参考光线。在此,表面形貌检测系统更可以包含偏光单元,偏光单元设置于光源与分光镜之间,用以偏振标准光线。此外,第一光线与测试光线的总光程,可以等于第二光线、修正后的第二光线、参考光线与修正后的参考光线的总光程。
11.综上所述,本技术提供的表面形貌检测系统在其中一条光路径中加入了用空间光调制器,空间光调制器会依据待测端物镜与参考端物镜之间的镜头像差,补偿入射空间光调制器的光线。经过空间光调制器修正后的光线,会更匹配另一光路径中的光线,以解决待测端物镜与参考端物镜不匹配的问题。因此,本技术提供的表面形貌检测系统能够改善表面形貌的测量准确度。
12.有关本技术的其它功效及实施例的详细内容,配合图式说明如下。
附图说明
13.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,
还可以根据这些附图获得其它的附图。
14.图1是现有技术中的表面形貌检测系统的示意图;
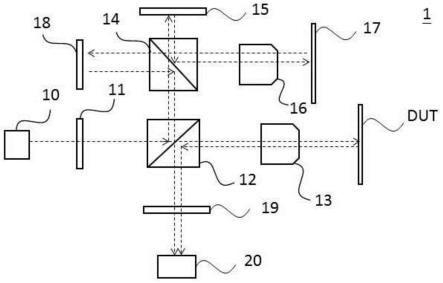
15.图2是依据本技术一实施例的表面形貌检测系统的示意图;
16.图3是依据本技术另一实施例的表面形貌检测系统的示意图;
17.图4是依据本技术再一实施例的表面形貌检测系统的示意图。
18.符号说明
19.1:表面形貌检测系统
ꢀꢀ
10:光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11:偏光单元
20.12:分光镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13:待测端物镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14:分光镜
21.15:反射镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16:参考端物镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17:参考表面
22.18:空间光调制器
ꢀꢀꢀꢀꢀ
19:透镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20:检测模块
23.3:表面形貌检测系统
ꢀꢀ
30:光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31:偏光单元
24.32:分光镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33:待测端物镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34:分光镜
25.35:反射镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
26:参考端物镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
37:参考表面
26.38:空间光调制器
ꢀꢀꢀꢀꢀ
39:透镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40:检测模块
27.5:表面形貌检测系统
ꢀꢀ
50:光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
51:偏光单元
28.52:分光镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
53:待测端物镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
54:空间光调制器
29.55:参考端物镜
ꢀꢀꢀꢀꢀꢀꢀ
56:参考表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
57:透镜
30.58:检测模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9:表面形貌检测系统
ꢀꢀꢀꢀ
90:光源
31.91:偏振片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
92:分光镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
93:物镜
32.94:物镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
95:反射镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
96:摄影机
33.dut:待测表面
具体实施方式
34.在下文的实施方式中所述的位置关系,包括:上,下,左和右,若无特别指明,皆是以图式中组件绘示的方向为基准。
35.请参阅图2,图2是依据本技术一实施例的表面形貌检测系统的示意图。如图2所示,本技术所揭露的表面形貌检测系统1可以用来检测对象的待测表面dut。所述对象可以是芯片、晶粒(die)、晶圆(wafer)、面板、电路或具有微结构的表面。当然,前述举出的例子并非用以限制所述对象的类型与尺寸,实务上所述对象也可以是任意的物体,于所属技术领域具有通常知识者可以自由选择。图2绘示的表面形貌检测系统1可以具有光源10、分光镜12(第一分光镜)、待测端物镜13、参考端物镜16、空间光调制器(spatial light modulator)18以及检测模块20。当然,表面形貌检测系统1还可以包含图2中绘示的偏光单元11、分光镜14(第二分光镜)、反射镜15、参考表面17与透镜19,本实施例不加以限制。以下说明表面形貌检测系统1的光学架构。
36.光源10是用来提供标准光线,光源10可以例如是点光源或面光源。一般来说,光源10输出的标准光线应当是平行光,如果光源10是点光源时,则光源10提供的标准光线会进入额外提供的透镜(图未示),所述透镜的功能是将来自点光源的光线转换成平行光。于所属技术领域具有通常知识者应该明白,光源10大致上会在所述透镜的焦点位置,从而经过所述透镜的光线,大致上可被视为一个平行光。当然,如果光源10原本就是可以产生平行光
的面光源,实务上也可以不需要透镜。此外,光源10可以是同调光光源或者是非同调光源,从而所述标准光线可以是同调光光线或者是一种非同调光光线。
37.偏光单元11会设置于光源10与分光镜12之间,用以偏振标准光线。实务上,偏光单元11可以是一种光学偏振片,本实施例不限制偏振后的标准光线的极性。此外,分光镜12是位于标准光线的光学路径(第一光路径)上,用以将标准光线分为第一光线与第二光线。以图2绘示的例子来说,第一光线射向分光镜12的右侧,朝向待测端物镜13,而第二光线射向分光镜12的上侧,朝向分光镜14。于一个例子中,标准光线与第一光线可以是同一方向,而第二光线可以朝向垂直标准光线的方向。当然,本实施例不限制第一光线与第二光线的方向,例如也有可能标准光线与第二光线是同一方向,而第一光线朝向垂直标准光线的方向。实务上,分光镜12可以将标准光线分割成两道相同的光线,也就是说理论上第一光线与第二光线应当是具有相同的光学特性。本实施例定义分光镜12右侧为第一光路径,分光镜12上侧为第二光路径,从而可以看成第一光线会进入第一光路径中,而第二光线会进入第二光路径中。
38.先就射向分光镜12右侧的第一光线来说,第一光线会先进入待测端物镜13,接着第一光线会投射于待测表面dut,待测表面dut表面通常是光滑表面并且可以用来反射光线。本实施例将经过待测表面dut反射的光线称为测试光线,测试光线会包含待测表面dut表面的信息,例如待测表面dut的表面形貌。实务上,第一光线会垂直入射待测表面dut,从而测试光线也会垂直出射待测表面dut。也就是说,第一光线和测试光线是在同光轴上,只是第一光线和测试光线的前进方向不同。此外,测试光线会再次返回待测端物镜13,并且从待测端物镜13射向分光镜12。于一个例子中,分光镜12可以将测试光线投射向检测模块20,而检测模块20可以包含摄影机来接收测试光线。于图2绘示的例子中,分光镜12和检测模块20之间具有透镜19,透镜19可以拉伸光程,让用户可以调整检测模块20的设置位置,以增加设计表面形貌检测系统1时的弹性。于所属技术领域具有通常知识者应可以明白,透镜19并非必要组件,纵使没有透镜19也不影响表面形貌检测系统1的基本功能。于一个例子中,前述的第一光路径可以是从依序经过分光镜12、待测端物镜13、待测表面dut、待测端物镜13,再回到分光镜12的光路径。
39.接着就射向分光镜12上侧的第二光线来说,第二光线会先穿过分光镜14,再由反射镜15反射第二光线回分光镜14。此时,分光镜14可以将经过反射镜15反射的第二光线射向参考端物镜16,第二光线会经过参考端物镜16入射参考表面17。与前述的待测表面dut相类似的是,参考表面17是光滑表面并且可以用来反射光线,本实施例将经过参考表面17反射的光线称为参考光线。于一个例子中,参考表面17应当是一种经过检验的标准件,例如可以是一种标准的镜面,因此本可实施例可以排除参考表面17影响参考光线的因素,而缩减变因缩减为参考端物镜16的误差。实务上,第二光线会垂直入射参考表面17,从而参考光线也会垂直出射参考表面17,也就是说第二光线和参考光线也是同光轴上只是前进方向不同。
40.承接上述,参考光线出射参考表面17后,会再次返回参考端物镜16,并且从参考端物镜16穿过分光镜14射向空间光调制器18。于一个例子中,空间光调制器18可以具有多个像素,且所述多个像素可以排列成数组形式。在此,本实施例提供的空间光调制器18可以是一种反射式的空间光调制器,而每个像素可以被看成一种微镜面,决定是否让光线通过特
定像素。换句话说,空间光调制器18可以依据控制指令来决定哪些像素可以反射光线,哪些像素不会反射光线(或将光线射向他处)。以实际的例子来说,本实施例会预先量测待测端物镜13和参考端物镜16之间的镜头像差,并且把所述镜头像差转换成修正参数,所述修正参数被包含在控制指令中,可以用来控制空间光调制器18中的像素。被空间光调制器18反射(被修正)后的参考光线,已经补偿了待测端物镜13和参考端物镜16之间的镜头像差。此时,修正后的参考光线会返回分光镜14,并且从分光镜14射向分光镜12。于一个例子中,分光镜12可以将修正后的参考光线投射向检测模块20,而检测模块20可以包含摄影机来接收修正后的参考光线。实务上,修正后的参考光线和测试光线之间应当只会反映出参考表面17和待测表面dut的差异,由于参考表面17是前述经过检验的标准件,故检测模块20可以通过修正后的参考光线和测试光线计算出待测表面dut的表面形貌。
41.于一个例子中,前述的第二光路径可以是从依序经过分光镜12、分光镜14、反射镜15、分光镜14、参考端物镜16、参考表面17、参考端物镜16、分光镜14、空间光调制器18、分光镜14,再回到分光镜12的光路径。此外,待测端物镜13和待测表面dut之间也可以设有透镜(图未示),与透镜19相类似的是,待测端物镜13和待测表面dut之间的透镜也可以用来拉伸光程,让使用者可以调整待测表面dut的设置位置,以增加设计表面形貌检测系统1时的弹性。相类似地,参考端物镜16和参考表面17之间也可以设有透镜(图未示),本实施例在此不加以限制。
42.值得一提的是,虽然图2绘示了分光镜14和反射镜15,但本实施例不以此为限。分光镜14和反射镜15的功能是调整第二光线和参考光线的光路径,从而能够在参考光线回到分光镜12之前进入空间光调制器18,以修正参考光线,实务上也有可能用其他的光学组件替代分光镜14和反射镜15。此外,反射镜15可以被设计成能够前后移动的镜面,当反射镜15被移动某一距离,检测模块20接收到修正后的参考光线和测试光线的总和亮度最高时,可以视为修正后的参考光线和测试光线恰好是建设性(constructive)干涉。建设性干涉表示检测模块20接收到两道光线为零光程差,以物理的意义来说,就是标准光线在被分光镜12分成第一光线和第二光线之后,到检测模块20接收修正后的参考光线和测试光线前有一样的光程,即第一光线与测试光线的总光程,会等于第二光线、参考光线与修正后的参考光线的总光程。接着,再通过找出形成建设性干涉的反射镜15位置,推知反射镜15被移动的距离,从而可以算出待测表面dut的表面形貌。
43.详细来说,检测模块20可以在第一时间区间内可以连续拍摄多张影像,每一张影像可以对应反射镜15的一个位置。也就是说,反射镜15可以在第一时间区间内移动一个范围,而检测模块20记录了在反射镜15移动的过程中,每一个反射镜15位置对应的修正后的参考光线和测试光线的总和亮度。实务上,所述总和亮度可以用灰阶值表现,也就是说在第一时间区间内,检测模块20可以记录一连串的灰阶值。当反射镜15移动了第一距离时,检测模块20记录到的灰阶值最大(总和亮度最高),即可使用所述第一距离推算待测表面dut的表面形貌。本实施例在此不限制由所述第一距离推算表面形貌的方式,于所属技术领域具有通常知识者可以依据实际光路架构调整。
44.此外,本实施例也不限制射向第二光路径的顺序,例如分光镜12上侧的第二光线不一定要先穿过分光镜14再到反射镜15。请一并参阅图2与图3,图3是依据本技术另一实施例的表面形貌检测系统的示意图。与图2相同的是,表面形貌检测系统3同样可以具有光源
30、偏光单元31、分光镜32(第一分光镜)、待测端物镜33、分光镜34(第二分光镜)、反射镜35、参考端物镜36、参考表面37、空间光调制器38、透镜39以及检测模块40。并且,分光镜32也可以将光源30发出的标准光线分为第一光线与第二光线。与图2不同的是,就射向分光镜32上侧的第二光线来说,第二光线有可能先被分光镜34反射向空间光调制器38,使得空间光调制器38可以依据修正参数补偿第二光线,并从空间光调制器38反射出修正后的第二光线。
45.接着,修正后的第二光线可以再进入参考端物镜36,并由参考表面37反射后可被视为参考光线。所述参考光线再经由分光镜34与反射镜35回到分光镜32,再经过分光镜32与透镜39至检测模块40。由上述可知,前一个实施例示范了空间光调制器18修正的对象是经过参考表面17反射后的参考光线,而实施例示范了空间光调制器38修正的对象是在进入参考表面37前的第二光线。于一个例子中,本实施例的第二光路径有别于前一个实施例,可以是从依序经过分光镜32、分光镜34、空间光调制器38、分光镜34、参考端物镜36、参考表面37、参考端物镜36、分光镜34、反射镜35、分光镜34,再回到分光镜32的光路径。于所属技术领域具通常知识者可以理解,检测模块20收到的修正过的参考光线应该相同于检测模块40收到的参考光线,都是在第二光路径中经过一次空间光调制器的光线,差别只是空间光调制器修正光线的顺序不同。
46.于一个例子中,检测模块40接收到修正后的参考光线和测试光线的总和亮度最高时,可以视为修正后的参考光线和测试光线恰好是建设性干涉。建设性干涉表示检测模块40接收到两道光线为零光程差,以物理的意义来说,就是标准光线在被分光镜32分成第一光线和第二光线之后,到检测模块40接收参考光线和测试光线前有一样的光程,即第一光线与测试光线的总光程,会等于第二光线、修正后的第二光线与参考光线的总光程。接着,再通过找出形成建设性干涉的反射镜35位置,推知反射镜35被移动的距离,从而可以算出待测表面dut的表面形貌。
47.图2与图3绘示的表面形貌检测系统都是应用了反射式的空间光调制器,但实际上空间光调制器还有可能是穿透式的。举例来说,穿透式的空间光调制器可以包含可透光的像素数组,所述像素数组可以具有一液晶层(图未示),通过控制所述液晶层中的液晶旋转方向,决定是否让光线通过特定像素。请一并参阅图2与图4,图4是依据本技术再一实施例的表面形貌检测系统的示意图。如图所示,与图2相同的是,表面形貌检测系统5同样可以具有光源50、偏光单元51、分光镜52(第一分光镜)、待测端物镜53、空间光调制器54、参考端物镜55、参考表面56、透镜57以及检测模块58。并且,分光镜52也可以将光源50发出的标准光线分为第一光线与第二光线。
48.与图2不同的是,图4的实施例调整了第二光路径上的光学组件。就射向分光镜52上侧的第二光线来说,第二光线会进入空间光调制器54,由于空间光调制器54是穿透式的,故第二光线经过空间光调制器54之后可以看成修正后的第二光线。接着,修正后的第二光线会经由参考端物镜55至参考表面56。参考表面56会反射修正后的第二光线,本实施例称参考表面56反射出的光线为参考光线。实务上,参考光线会沿着入射的光轴返回参考端物镜55,并再次经过空间光调制器54。此时,参考光线经过空间光调制器54之后可以看成修正后的参考光线。于一个例子中,本实施例的第二光路径有别于前一个实施例,可以是从依序经过分光镜52、空间光调制器54、参考端物镜55、参考表面56、参考端物镜55、空间光调制器
54,再回到分光镜52的光路径。由上述可知,本实施例的第二光路径会经过两次空间光调制器54,相较于前述实施例多一次。
49.值得一提的是,虽然本实施例也会先将待测端物镜53和参考端物镜55之间的镜头像差测量出来,但这里的修正参数只会是前一个实施例的一半。举例来说,因为图2的例子于第二光路径中只会经由空间光调制器18修正一次(例如是参考光线被修正),从而必须在经过空间光调制器18时完全补偿镜头像差。为了方便说明,在此假设图2的表面形貌检测系统1使用的修正参数可以对应修正100%的镜头像差。但是由图4可知,表面形貌检测系统5的第二光路径会经过两次空间光调制器54(第二光线与参考光线各经过一次)。此时,如果表面形貌检测系统5的修正参数相同于表面形貌检测系统1的修正参数,则显然有过度修正镜头像差的问题。据此,相比于图2的例子,本实施例表面形貌检测系统5使用的修正参数仅对应修正镜头像差的50%,也就是第二光线变成修正后的第二光线时,仅有50%的镜头像差被修正。而当参考光线变成修正后的参考光线时,另外50%的镜头像差被再次修正。如前所述,因为表面形貌检测系统5的第二光路径会经过两次空间光调制器54,总合起来表面形貌检测系统5还是可以修正100%的镜头像差。
50.于一个例子中,参考表面56可以将图2中的的反射镜15和参考表面17整合成一个组件,也就是参考表面56可以被设计成能够前后移动的镜面,且所述镜面可以是经过检验的标准件。与前一实施例类似地,当参考表面56被移动某一距离,检测模块58接收到修正后的参考光线和测试光线的总和亮度最高时,可以视为修正后的参考光线和测试光线恰好是建设性干涉。建设性干涉表示检测模块58接收到两道光线为零光程差,即第一光线与测试光线的总光程,会等于第二光线、修正后的第二光线、参考光线与修正后的参考光线的总光程。接着,再通过找出形成建设性干涉的参考表面56位置,推知参考表面56被移动的距离,从而可以算出待测表面dut的表面形貌。
51.综上所述,本技术提供的表面形貌检测系统在其中一条光路径中加入了空间光调制器,空间光调制器会依据待测端物镜与参考端物镜之间的镜头像差,补偿入射空间光调制器的光线。经过空间光调制器修正后的光线,会更匹配另一光路径中的光线,以解决待测端物镜与参考端物镜不匹配的问题。因此,本技术提供的表面形貌检测系统能够改善表面形貌的测量准确度。
52.以上所述的实施例及/或实施方式,仅是用以说明实现本技术技术的较佳实施例及/或实施方式,并非对本技术技术的实施方式作任何形式上的限制,任何本领域技术人员,在不脱离本技术内容所公开的技术手段的范围,当可作些许的更动或修饰为其它等效的实施例,但仍应视为与本技术实质相同的技术或实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1