一种高度测量方法和高度缺陷判定方法与流程
1.本申请涉及物体相对平面的高度测量领域,具体涉及一种高度测量方法和高度缺陷判定方法。
背景技术:
2.现有技术中,需要测量集成电路板上用于连接的多个顶部呈半球形的柱状晶元的高度,以确定是否存在高度超标的柱状晶元,如高度超标则判定为缺陷。
技术实现要素:
3.本申请的目的在于克服背景技术中存在的上述缺陷或问题,提供一种高度测量方法和高度缺陷判定方法,其能够测量待测物体在第一平面上的高度,并判定多个待测物体在第一平面上的高度是否存在缺陷。
4.为达成上述目的,采用如下技术方案:
5.一种高度测量方法,用于测量待测物体在第一平面上的高度;其包括如下步骤:设置相机,使相机俯视待测物体,且其光轴倾斜于所述第一平面;使待测物体相对相机沿平行于第一平面的方向靠近或远离,在此期间对待测物体持续拍照;确定每张照片中存在的物方焦平面与待测物体相交或相切的第一点或第一线,并将该照片中第一点或第一线中距离照片的第一水平线的距离值最大的点与第一水平线之间的距离值计为第一距离值;其中,位于照片第一水平线下方的点与第一水平线的距离值计为负值,位于照片第一水平线上方的点与第一水平线的距离值计为正值;第一水平线为任意人为确定的照片上的平行于第一平面的线;所有照片的第一距离值中最大值为最大距离值;根据最大距离值计算待测物体的高度。
6.进一步地,如定义照片中过光轴且平行于第一平面的线为第一水平线;则h=h+d
max
·
cosα;其中h为待测物体在第一平面上的高度;h为相机物方焦点在第一平面上的高度;d
max
为最大距离值所对应的实际距离;α为相机光轴与第一平面夹角。
7.一种高度缺陷判定方法,用于判定多个待测物体在第一平面上的高度是否存在缺陷,其包括:采用上面任一项所述的高度测量方法测量每个待测物体在第一平面上的高度值;如所有待测物体在第一平面上的高度值中存在与标准高度值或高度平均值之间的差值的绝对值大于阈值的值,则判定为存在缺陷,否则判定为无缺陷。
8.相对于现有技术,上述方案具有的如下有益效果:
9.本申请公开了一种原创的物体高度测量方法,利用倾斜的相机的焦平面与相对运动的物体相交或相切的点或线,确定所有照片中距离第一水平线最高的点的距离,并据此获得待测物体的高度。基于此高度测量方法,本申请还公开了多个待测物体时是否存在高度缺陷的判定方法,通过上述方法,能够不间断地在产线上确定集成电路板上柱状晶元是否存在高度缺陷。
附图说明
10.为了更清楚地说明实施例的技术方案,下面简要介绍所需要使用的附图:
11.图1为待测物体还未与焦平面相交时的状态示意图;
12.图2为待测物体与焦平面相切时的状态示意图;
13.图3为待测物体的最高点与焦平面相交时的状态示意图;
14.图4为待测物体其他部分与焦平面相交时的状态示意图;
15.图5为第一平面上有多个待测物体时的高度测量示意图。
16.主要附图标记说明:
17.物体x;第一平面l;光学中心o;物方焦点m;第一点(第一线)n;相机倾角α;第一点或第一线到第一水平线的第一距离所对应的实际距离d;第一点或第一线到第一水平线的最大距离所对应的实际距离d
max
;物体在第一平面上的高度h;物方焦点在第一平面上的高度h。
具体实施方式
18.权利要求书和说明书中,除非另有限定,术语“第一”、“第二”或“第三”等,都是为了区别不同对象,而不是用于描述特定顺序。
19.权利要求书和说明书中,除非另有限定,术语“中心”、“横向”、“纵向”、“水平”、“垂直”、“顶”、“底”、“内”、“外”、“上”、“下”、“前”、“后”、“左”、“右”、“顺时针”、“逆时针”等指示的方位或位置关系乃基于附图所示的方位和位置关系,且仅是为了便于简化描述,而不是暗示所指的装置或元件必须具有特定的方位或以特定的方位构造和操作。
20.权利要求书和说明书中,除非另有限定,术语“固接”或“固定连接”,应作广义理解,即两者之间没有位移关系和相对转动关系的任何连接方式,也就是说包括不可拆卸地固定连接、可拆卸地固定连接、连为一体以及通过其他装置或元件固定连接。
21.权利要求书和说明书中,除非另有限定,术语“包括”、“具有”以及它们的变形,意为“包含但不限于”。
22.下面将结合附图,对实施例中的技术方案进行清楚、完整地描述。
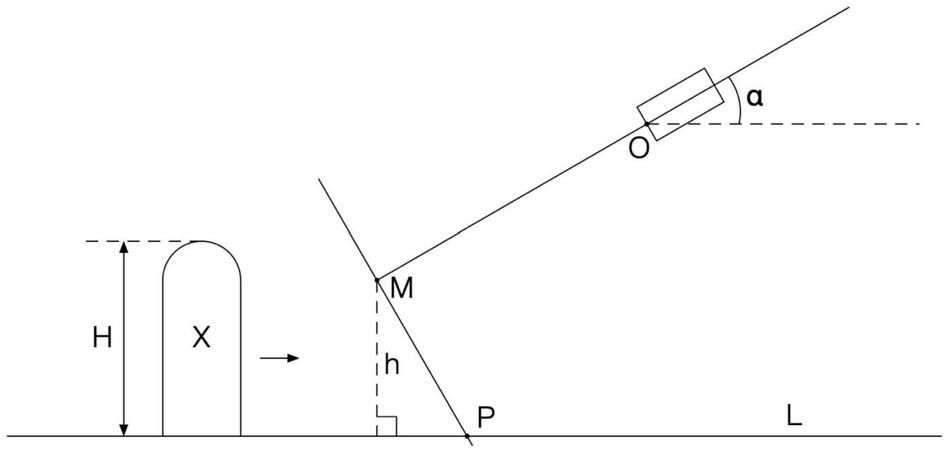
23.参见图1至图4,图1至图4示出了物体x在靠近相机的过程中物体与相机的状态。如图1所示,需要测量物体x在第一平面l上的高度h。此时,先设置相机,使相机俯视物体x,并使相机的光轴倾斜于第一平面l,相机光轴相对于第一平面l的相机倾角为α。使物体x相对相机沿与第一平面l平行的方向靠近或远离(本实施例中为靠近,远离时为其反过程)。在物体x靠近相机的过程中,相机对物体持续拍照。
24.接着,确定每张照片中存在的相机物方焦平面与物体x相交或相切的第一点或第一线n,并将该照片中第一点或第一线n中距离照片的第一水平线的距离值最大的点与第一水平线之间的距离值计为第一距离值;其中,位于照片第一水平线下方的点与第一水平线的距离值计为负值,位于照片第一水平线上方的点与第一水平线的距离值计为正值;第一水平线定义为任意人为确定的照片上的平行于第一平面l的线,本实施例中采用照片上平行于第一平面l且过光轴的线作为第一水平线,当然,采用其他第一水平线也没有问题,只要该水平线所对应的相对第一平面l的高度已被标定即可。关于如何在照片上确定相机的焦平面与任意物体的相交的第一点或第一线n,此为现有技术,主要是通过对图像灰度变化
进行分析,排除图像中的平滑区域(离焦区域),获取图像中的边缘区域(对焦区域)实现。而对于图像边缘的检测,可见ieee的canny发表的相关文献《a computational approach to edge detection》。另一学者sobel也在1973年出版的专著《pattern classification and scene analysis》中的注解部分公开了其方法。
25.再次,找到所有照片中第一距离值中最大值为最大距离值(需要考虑第一距离值的符号而不是绝对值)。
26.最后,根据该最大距离值计算待测物体的高度。本实施例中,由基本的几何知识可知,待测物体的高度h=h+d
max
·
cosα,其中,h为待测物体在第一平面上的高度;h为相机物方焦点在第一平面上的高度;d
max
为最大距离值所对应的实际距离;α为相机光轴与第一平面夹角。
27.如图1所示,在物体x与相机的焦平面不相交也不相切时,相机的焦平面将与第一平面l相交于第二线p。
28.如图2所示,随着物体x进一步靠近相机,物体x与焦平面相切于第一点n,此时,第一点n与第一水平线之间的距离所对应的实际距离为d,如图所示,此时第一点n可能在第一水平线之上,则d为正值,而当第一点n在第一水平线之下时,d为负值。
29.如图3所示,当物体x的最高点位于焦平面上时,第一线n可以表现为一个封闭曲线。此时,图3中的两个n点分别为该封闭曲线的最高点和最低点,其中最高点也即是物体x相对第一平面l的最高点,其与第一水平线的距离所对应的实际距离为d
max
。
30.如图4所示,当物体x的最高点通过焦平面后,第一线n也表现为一个封闭曲线,此时,图4中的两个n点分别为该封闭曲线的最高点和最低点,其中,最高点与第一水平线的距离所对应的实际距离为d,d<d max
。
31.通过以上介绍可知,本实施例利用倾斜的相机的焦平面与相对运动的物体x相交或相切的第一点或第一线n,确定所有照片中距离第一水平线最高的点的距离,并据此获得待测物体的高度。
32.本实施例还基于以上高度测量方法公开了一种高度缺陷判定方法,用于判定多个物体在第一平面l上的高度是否存在缺陷。具体为:
33.如图5所示,根据以上高度测量方法测量每个待测物体在第一平面上的高度值。
34.如所有待测物体在第一平面上的高度值中存在与标准高度值或高度平均值之间的差值的绝对值大于阈值的值,则判定为存在缺陷,否则判定为无缺陷。
35.据此,在检测具有多个柱状晶元的集成电路板时,将集成电路板所在平面视为第一平面l,将各柱状晶元视为物体x,可以找到存在高度缺陷的集成电路板。
36.上述说明书和实施例的描述,用于解释本申请的保护范围,但并不构成对本申请保护范围的限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1