扫描光栅微镜的机电性能测试系统及方法
1.本发明属于微光机电技术领域,具体涉及一种扫描光栅微镜的机电性能测试方法及方法。
背景技术:
2.扫描光栅微镜是一种具有光学扫描与光谱分光功能的新型moems(微光机电)器件,有着体积小、集成度高、成本低等显著优点,是新一代光谱检测装备的核心器件,被广泛应用于微型光谱仪等领域中。
3.对扫描光栅微镜的机械扫描角度、谐振频率等机电性能进行表征标定不仅是评判器件性能,对指导器件优化设计也有着重要作用,同时是对扫描光栅微镜的闭环控制系统的标定提供了重要实验数据。其表征标定的准确性将极大地影响其在具体应用系统中的控制精度。
4.在扫描微镜的机电性能测试方法的研究方面,a.tortschanoff等人于2010年提出了利用两个相对位置固定的光电探测器测定扫描微镜的机械扫描角的方法,但该方法在实际应用中存在着两个光电探测器位置难以确定,以及光电探测器放置夹角对测量数据有一定影响等问题。2016年西北工业大学的乔大勇团队提出了一种mems(微机电系统)扫描镜性能参数测量系统及方法(cn 106248347 b),其通过对反射至psd(一维位置敏感探测器) 的光斑位置信息进行正弦拟合得到扫描镜的振动幅度值,再根据扫描镜的振动幅度值并结合psd与扫描镜镜面之间的距离计算得到扫描镜振动的角度值。但该方法存在结构件位置以及相对角度难以确定的问题,且对采样速率以及psd响应速度要求高等问题;同时无论是tortschanoff团队还是乔大勇团队所提及的测量方法都是针对扫描微镜开发设计,其主要思想为利用点光电探测器与固定测试夹具测量扫描光斑在一定平面上的位置随时间变化的规律,通过几何光学分析求出器件的机械转角。而微型扫描光栅微镜由于其反射面为光栅,当入射光线经光栅面反射后其出射光斑为一系列按级次展开的光斑。当微型扫描光栅微镜处于工作状态时,其出射光斑有可能发生级次交叠现象。上述两种测试方法在出现级次交叠现象时由于无法分辨各光斑来自于那个级次,因而将无法完成对扫描光栅微镜机电性能的测试与表征。
技术实现要素:
5.本发明提出一种扫描光栅微镜机电性能测试系统及方法,能用于扫描光栅微镜的机械扫描半角的测试。
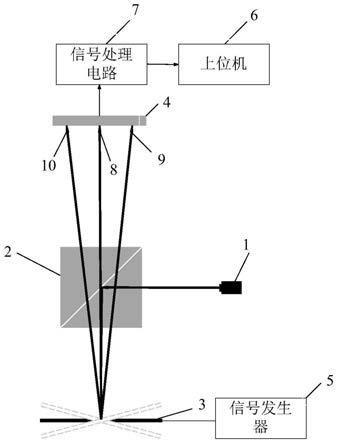
6.第一方面,本发明所述的一种扫描光栅微镜的机电性能测试系统,包括激光器、分束镜、psd(一维位置敏感探测器)、信号发生器和上位机;所述激光器、分束镜、psd和被测的扫描光栅微镜之间的相对位置关系应满足以下要求:
7.当扫描光栅微镜处于静止状态且未给扫描光栅微镜施加驱动电压时,激光器的出射光线垂直入射到分束镜,入射光线经分束镜垂直入射到扫描光栅微镜镜面,经扫描光栅
微镜反射后的第0级光斑透过分束镜垂直入射到psd光敏面的中心位置;
8.所述信号发生器的输出端与扫描光栅微镜的驱动线圈连接,所述psd与上位机电连接;所述信号发生器用于输出预设幅值的驱动信号来驱动扫描光栅微镜使其振动,所述激光器出射的光线经分束镜后再经扫描光栅微镜反射形成的光线在psd光敏面上扫描;光线在 psd上移动的轨迹由psd的信号处理电路读出并输入给上位机进行处理得到扫描线长a;并根据扫描线长a以及扫描光栅微镜到psd感光面的距离l计算出光学扫描半角θ,并根据光学扫描半角θ计算出机械扫描半角θ0,计算公式如下:
[0009][0010]
第二方面,本发明所述的一种扫描光栅微镜的机电性能测试方法,采用如本发明所述的扫描光栅微镜的机电性能测试系统,其方法包括以下步骤:
[0011]
步骤1.调节光路:当扫描光栅微镜处于静止状态且未给扫描光栅微镜施加驱动电压时,所述激光器的出射光线垂直入射到分束镜,入射光线经分束镜垂直入射到扫描光栅微镜镜面,经扫描光栅微镜反射后的第0级光斑透过分束镜垂直入射到psd光敏面的中心位置;
[0012]
步骤2.测试:信号发生器输出预设幅值的驱动信号给扫描光栅微镜,驱动扫描光栅微镜使其振动,并通过调整驱动信号的频率,使扫描光栅微镜处于谐振状态;此时,扫描光栅微镜的出射光斑在psd感光面上按相同频率做周期性往复扫描,并在psd上呈现出多条相互重叠的扫描线;扫描光斑的位置随时间变化的信息经psd的信号处理电路输出至上位机;上位机对信号处理电路输出信号进行曲线拟合,并将拟合出的曲线的幅值带入psd标定模型中得出扫描线长a;根据扫描线长a以及扫描光栅微镜到psd光敏面的距离l计算出光学扫描半角θ,并根据光学扫描半角θ计算出机械扫描半角θ0,计算公式如下:
[0013][0014]
其中,所述psd标定模型是基于psd的信号处理电路的输出信号拟合出的曲线的幅值大小与出射光斑到psd中心的距离的对应关系,所述扫描线长a等于出射光斑到psd中心的距离乘以2。
[0015]
利用激光测距模块多次测量光栅扫描微镜到psd光敏面的直线距离,取各次测量数据的平均值作为扫描光栅微镜到psd光敏面的距离l;以保证测试精度。
[0016]
进一步,在进行光路调整时,使所述激光器的出射光线与分束镜的表面保持垂直,分束镜的反射光线与扫描光栅微镜保持垂直。
[0017]
进一步,所述psd的信号处理电路输出两个模拟输出量,分别为和电流与差电流,基于和电流区分出psd光敏面上光线级次未交叠部分,计算出光线级次未交叠部分的和电流与差电流之比,并对计算出的光线级次未交叠部分的和电流与差电流之比的数据进行曲线拟合,将拟合结果带入psd标定模型,得到扫描线长a。
[0018]
本发明具有以下优点:
[0019]
(1)在出现级次交叠现象时,能够准确分辨出各光斑来自哪个级次,故能够实现对扫描光栅微镜的机械扫描半角的测试,从而解决了传统的测试方法不能对扫描光栅微镜的机电性能进行测试的问题;
[0020]
(2)本发明利用分束镜的性能,提高了光路调整的准确度与效率,提高了测试的可
靠性和测试的效率;
[0021]
(3)本发明使用psd,避免了使用点探测器时的安装以及采样点数较少的问题,提高了测试精度;
[0022]
(4)通过对psd的信号处理电路的两路模拟输出信号进行筛选和曲线拟合,降低了噪音对测试信号的影响,提升了测试系统的鲁棒性及测试精度。
附图说明
[0023]
图1为本实施例中扫描光栅微镜静止状态时的示意图;
[0024]
图2为本实施例中光线未产出级次重叠时的示意图;
[0025]
图3为本实施例中光线产出级次重叠时的示意图;
[0026]
图4为本实施例中出射光斑到psd中心的距离与曲线的幅值的对应关系图;
[0027]
图中:1、激光器,2、分束镜,3、扫描光栅微镜,4、psd,5、信号发生器,6、上位机,7、信号处理电路,8、第0级光斑,9、第1级光斑,10、第
‑
1级光斑。
具体实施方式
[0028]
以下结合附图本实施例进行详细的说明。
[0029]
如图1至图3所示,本实施例中,一种扫描光栅微镜的机电性能测试系统,包括激光器1、分束镜2、psd4、信号发生器5和上位机6;所述激光器1、分束镜2、psd4和被测的扫描光栅微镜3之间的相对位置关系应满足以下要求:
[0030]
当扫描光栅微镜3处于静止状态且未给扫描光栅微镜3施加驱动电压时,激光器1的出射光线垂直入射到分束镜2,入射光线经分束镜2垂直入射到扫描光栅微镜3镜面,经扫描光栅微镜3反射后的第0级光斑透过分束镜2垂直入射到psd4光敏面的中心位置。
[0031]
所述信号发生器5的输出端与扫描光栅微镜3的驱动线圈连接,所述psd4与上位机6 电连接;所述信号发生器5用于输出预设幅值的驱动信号(比如:一固定幅值的正弦信号) 来驱动扫描光栅微镜3使其振动,所述激光器1出射的光线经分束镜2后再经扫描光栅微镜3反射形成的光线在psd4光敏面上扫描;光线在psd4上移动的轨迹由psd4的信号处理电路7读出并输入给上位机6进行处理得到扫描线长a;并根据扫描线长a以及扫描光栅微镜3到psd4感光面的距离l由激光三角法计算出光学扫描半角θ,并根据光学扫描半角θ计算出机械扫描半角θ0,计算公式如下:
[0032][0033]
本实施例中,激光器为激光出射模块,激光波长为650nm;扫描光栅微镜为待测试器件;psd及其信号处理电路用于感知出射光斑的光强以及位置信息并将其转化为电压信号;上位机中安装有数据处理软件,数据处理软件用于对psd输出的信号进行处理,计算并得出机械扫描半角θ0等关键信息。
[0034]
本实施例中,所述上位机采用计算机。
[0035]
本实施例中,一种扫描光栅微镜的机电性能测试方法,采用如本实施例中所述的扫描光栅微镜的机电性能测试系统,其方法包括以下步骤:
[0036]
步骤1.调节光路:当扫描光栅微镜3处于静止状态且未给扫描光栅微镜3施加驱动
电压时,所述激光器1的出射光线垂直入射到分束镜2,入射光线经分束镜2垂直入射到扫描光栅微镜3镜面,经扫描光栅微镜3反射后的第0级光斑8透过分束镜2垂直入射到psd4 光敏面的中心位置,参见图1,位于第0级光斑8左边的光斑为第
‑
1级光斑10,位于第0 级光斑8左边的光斑为第1级光斑9,此时光路调节完毕。
[0037]
步骤2.测试:连接信号发生器5的输出端至扫描光栅微镜3的驱动线圈,信号发生器 5输出预设幅值的驱动信号给扫描光栅微镜3,当在扫描光栅微镜3上施加幅值较小且信号频率等于扫描光栅微镜谐振频率的驱动信号时,扫描光栅微镜3处于谐振状态,且振幅较小,经其反射的光线在psd4上形成互不交叠的扫描光线,如图2所示。
[0038]
当在扫描光栅微镜3施加幅值较大的驱动电压且信号频率等于扫描光栅微镜谐振频率的驱动信号时,扫描光栅微镜3处于谐振状态,且振幅较大,此时,扫描光栅微镜3的出射光斑在psd4感光面上按相同频率做周期性往复扫描,并在psd4上呈现出多条相互重叠的扫描线;如图3所示。扫描光斑的位置随时间变化的信息经psd4的信号处理电路7输出至上位机6;上位机6对信号处理电路7输出信号进行曲线拟合,并将拟合出的曲线的幅值带入psd标定模型中得出扫描线长a;具体为:
[0039]
所述psd4的信号处理电路7输出两个模拟输出量,分别为和电流(xh)与差电流(xc),其中,和电流与差电流之比(xc/xh)可以用于准确反映出光斑在psd4光敏面上的运动轨迹;同时,和电流值也可准确反映psd4光敏面所受光强的大小,基于和电流可区分出psd4 上光线级次未交叠部分,本实施例中,光线级次未交叠部分即是第0级光斑8在psd4光敏面上的运动轨迹。基于光线级次未交叠部分计算出光线级次未交叠部分的和电流与差电流之比,并对计算出的光线级次未交叠部分的和电流与差电流之比的数据进行曲线拟合,将拟合出的曲线的幅值带入psd标定模型,得到扫描线长a。
[0040]
本实施例中,所述psd标定模型是基于psd4的信号处理电路7的输出信号拟合出的曲线的幅值大小与出射光斑到psd4中心的距离的对应关系(如图4所示,两者呈正比关系),所述扫描线长a等于出射光斑到psd中心的距离乘以2。
[0041]
根据扫描线长a以及扫描光栅微镜3到psd4光敏面的距离l,可由激光三角法计算出光学扫描半角θ,并根据光学扫描半角θ计算出机械扫描半角θ0,计算公式如下:
[0042][0043]
本实施例中,利用激光测距模块多次(比如:5次)测量光栅扫描微镜到psd4光敏面的直线距离,取五次测量数据的平均值作为扫描光栅微镜3到psd4光敏面的距离l。
[0044]
本实施例中,在进行光路调整时,使所述激光器1的出射光线与分束镜2的表面保持垂直,分束镜2的反射光线与扫描光栅微镜3保持垂直。经扫描光栅微镜3反射后的第0 级光斑透过分束镜2垂直入射到psd4光敏面的中心位置;以保证测试精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1