通过激光雷达获取标定板特征点及对应的联合标定方法与流程
1.本发明涉及一种通过激光雷达获取标定板特征点及对应的联合标定方法,属于多传感器联合标定技术领域。
背景技术:
2.自动驾驶车辆采用不同传感器感知周围环境信息,各传感器均有其独特的优缺点,对传感器进行信息融合,能够实现各传感器信息互补,保障自动驾驶感知系统的可靠性与准确性。激光雷达可以准确获取环境三维信息,相机可以获取具丰富纹理和颜色信息的图像,激光雷达与相机信息融合优势显著,但激光雷达与相机信息融合首先需要对二者的位姿关系进行外参标定。
3.目前通过提取标定板上的特征点对相机与激光雷达进行联合标定的方法应用较为广泛,如图1所示,对相机与激光雷达进行联合标定时,通常在相机与激光雷达共有的视野区域内放置标定板,通过获取标定物上的特征点在像素坐标系中的二维像素坐标与在激光雷达坐标系下的三维坐标,建立三维-二维特征点对的对应关系,通过基于标定物对应角点的算法(pespective-n-point,pnp)求解相机与激光雷达之间的外参r和t。其中,相机与激光雷达联合标定中三维-二维特征点对的转换公式为:
[0004][0005]
式中,k为相机的内参矩阵,[r|t]为相机与激光雷达之间的外参矩阵,(u,v)为特征点在像素坐标系下的二维坐标,(xw,yw,zw)为特征点在激光雷达坐标系下的三维坐标。
[0006]
在相机与激光雷达的联合标定中,特征点在像素坐标系下的二维坐标提取过程相对简单,但特征点在激光雷达坐标系下的三维坐标提取较为困难,因为激光雷达分辨率较低,激光雷达点云难以准确地打在特征点上。目前激光雷达坐标系下特征点坐标的获取需要通过一定的调校和拟合,例如申请公布号为cn105445721a、cn10361717a的中国发明专利申请文件中公开的激光雷达与摄像机联合标定方法,这两种方法利用最小二乘法通过选点拟合的方式获取激光雷达坐标系下的特征点坐标,所获取的特征点坐标精度有限,并且一种方法需要借助一种带特征突起的v型标定物才能实现,另一种方法需要借助一种带黑白棋盘格的l型标定板才能实现,这种需要借助特制的标定物才能实现的相机与激光雷达的联合标定方法,使用的局限性较强。
技术实现要素:
[0007]
本发明的目的在于提供一种通过激光雷达获取标定板特征点的方法,用以解决目前标定板特征点在激光雷达坐标系下的三维坐标提取较为困难、所获取的特征点坐标精度不高的问题;本发明还提供了一种相机与激光雷达的自动化联合标定方法,用以解决目前的联合标定方法中,标定板特征点在激光雷达坐标系下的三维坐标提取较为困难、所获取
的特征点坐标精度不高,导致联合标定的精度不高的问题。
[0008]
为了实现上述目的,本发明提供了一种通过激光雷达获取标定板特征点的方法,该方法包括以下步骤:
[0009]
利用激光雷达扫描标定板,基于扫描得到的点云数据计算得到标定板上的每个特征点在激光雷达坐标系下的三维坐标;所述标定板为矩形标定板,且对角放置在激光雷达能够感知到的区域,特征点为矩形标定板的顶点;
[0010]
其中,每个特征点在激光雷达坐标系下的三维坐标的计算过程包括:
[0011]
(1)对所述扫描得到的点云数据进行筛选得到打到标定板上的点云数据;
[0012]
(2)对所述打在标定板上的点云数据进行平面拟合,得到激光雷达坐标系下标定板的空间平面,并将所述打在标定板上的点云数据投影到所述标定板的空间平面上;
[0013]
(3)将所述标定板的空间平面及投影到该平面上的点云数据,旋转到x坐标值或y坐标值或z坐标值相等的三维平面;
[0014]
(4)取旋转到所述三维平面上的三维点云数据,通过相应去除这些三维点云数据的x坐标值或y坐标值或z坐标值得到二维点云数据集,求所述二维点云数据集的凸包,并求所述凸包的最小外接矩形,计算得到所述最小外接矩形各个顶点的二维坐标;
[0015]
(5)利用去除的x坐标值或y坐标值或z坐标值补全所述最小外接矩形各个顶点的第三维信息,得到最小外接矩形各个顶点的三维坐标,并将最小外接矩形各个顶点的三维坐标旋转到所述标定板的空间平面,得到最小外接矩形各个顶点在激光雷达坐标系下的三维坐标,将最小外接矩形各个顶点在激光雷达坐标系下的三维坐标作为标定板上的各特征点在激光雷达坐标系下的三维坐标。
[0016]
该通过激光雷达获取标定板特征点的方法的有益效果是:在提取特征点在激光雷达坐标系下的三维坐标时,先将标定板的空间平面旋转到x坐标值或y坐标值或z坐标值相等的三维平面,再通过相应忽略x坐标值或y坐标值或z坐标值将三维平面上的三维点云数据等同于二维点云数据,基于二维点云数据集计算得到凸包的最小外接矩形各个顶点的二维坐标,再利用去除的x坐标值或y坐标值或z坐标值补全最小外接矩形各个顶点的第三维信息,基于最小外接矩形各个顶点的三维坐标计算得到标定板上的各特征点在激光雷达坐标系下的三维坐标,可有效避免三维信息直接转二维信息过程中有用信息的丢失,能更好的保留标定板上点云的几何特性,保证后续计算得到的特征点坐标的准确性,所获取的特征点坐标精度较高。
[0017]
进一步地,在上述通过激光雷达获取标定板特征点的方法中,所述步骤(2)包括:采用最小二乘法与ransac算法相结合的平面拟合算法对所述打在标定板上的点云数据进行平面拟合,先利用ransac算法从打在标定板上的点云数据中筛选出设定比例的点云,再利用最小二乘法对筛选出的设定比例的点云进行平面拟合得到标定板的空间平面,然后将标定板的空间平面对应的内点投影到标定板的空间平面上;其中,通过分别计算打在标定板上的点云数据到标定板的空间平面的距离,将距离≤设定值的点云数据作为标定板的空间平面对应的内点。
[0018]
这样做的有益效果是:采用最小二乘法与ransac算法相结合的平面拟合算法,能够平衡平面拟合的正确性与速度,将标定板的空间平面对应的内点投影到标定板的空间平面上,与直接将打在标定板上的点云数据投影到标定板的空间平面上相比,能够提高后续
计算得到的特征点坐标的准确性。
[0019]
进一步地,在上述通过激光雷达获取标定板特征点的方法中,所述步骤(3)包括:通过计算标定板的空间平面的法向量与x坐标轴或y坐标轴或z坐标轴的夹角,利用所述夹角将标定板的空间平面及投影到该平面上的点云数据,旋转到x坐标值或y坐标值或z坐标值相等的三维平面。
[0020]
进一步地,在上述通过激光雷达获取标定板特征点的方法中,所述步骤(1)包括:采用基于密度的聚类方法对所述扫描得到的点云数据进行聚类,得到多个点云簇;根据激光雷达的扫描特性与标定板的几何特性对聚类得到的多个点云簇进行筛选,得到打在标定板上的点云数据;所述激光雷达的扫描特性为激光雷达的水平分辨率高于垂直分辨率,所述标定板的几何特性为标定板的长度、宽度和形状。
[0021]
进一步地,在上述通过激光雷达获取标定板特征点的方法中,所述步骤(1)还包括:对所述扫描得到的点云数据进行标定边界过滤,采用基于密度的聚类方法对进行标定边界过滤后的点云数据进行聚类,得到多个点云簇。
[0022]
进一步地,在上述通过激光雷达获取标定板特征点的方法中,所述基于密度的聚类方法为dbscan方法。
[0023]
本发明还提供了一种相机与激光雷达的自动化联合标定方法,该方法包括以下步骤:
[0024]
利用相机拍摄标定板的图像,基于得到的图像数据计算得到标定板上的每个特征点在像素坐标系下的二维坐标;所述标定板为矩形标定板,且对角放置在相机与激光雷达同时能够感知到的区域,特征点为矩形标定板的顶点,特征点有4个;
[0025]
利用激光雷达扫描标定板,基于扫描得到的点云数据计算得到标定板上的每个特征点在激光雷达坐标系下的三维坐标;
[0026]
将每个特征点对应的二维坐标和三维坐标组成一组点对数据,利用得到的所有点对数据基于pnp方法求解得到相机与激光雷达之间的外参;
[0027]
其中,每个特征点在激光雷达坐标系下的三维坐标的计算过程包括:
[0028]
(1)对所述扫描得到的点云数据进行筛选得到打到标定板上的点云数据;
[0029]
(2)对所述打在标定板上的点云数据进行平面拟合,得到激光雷达坐标系下标定板的空间平面,并将所述打在标定板上的点云数据投影到所述标定板的空间平面上;
[0030]
(3)将所述标定板的空间平面及投影到该平面上的点云数据,旋转到x坐标值或y坐标值或z坐标值相等的三维平面;
[0031]
(4)取旋转到所述三维平面上的三维点云数据,通过相应去除这些三维点云数据的x坐标值或y坐标值或z坐标值得到二维点云数据集,求所述二维点云数据集的凸包,并求所述凸包的最小外接矩形,计算得到所述最小外接矩形各个顶点的二维坐标;
[0032]
(5)利用去除的x坐标值或y坐标值或z坐标值补全所述最小外接矩形各个顶点的第三维信息,得到最小外接矩形各个顶点的三维坐标,并将最小外接矩形各个顶点的三维坐标旋转到所述标定板的空间平面,得到最小外接矩形各个顶点在激光雷达坐标系下的三维坐标,将最小外接矩形各个顶点在激光雷达坐标系下的三维坐标作为标定板上的各特征点在激光雷达坐标系下的三维坐标。
[0033]
该联合标定方法的有益效果是:首先,利用普通的矩形标定板即可完成相机与激
光雷达的自动化联合标定,无需借助特殊形状的标定物,操作简单,使用方便;其次,在提取特征点在激光雷达坐标系下的三维坐标时,先将标定板的空间平面旋转到x坐标值或y坐标值或z坐标值相等的三维平面,再通过相应忽略x坐标值或y坐标值或z坐标值将三维平面上的三维点云数据等同于二维点云数据,基于二维点云数据集计算得到凸包的最小外接矩形各个顶点的二维坐标,再利用去除的x坐标值或y坐标值或z坐标值补全最小外接矩形各个顶点的第三维信息,基于最小外接矩形各个顶点的三维坐标计算得到标定板上的各特征点在激光雷达坐标系下的三维坐标,可有效避免三维信息转二维信息过程中有用信息的丢失,保证后续计算得到的特征点坐标的准确性,所获取的特征点坐标精度较高,能够提高联合标定的精度;最后,实现了激光雷达坐标系下特征点坐标的自动化提取,可保证标定精度,节省人力,特别针对批量车提高标定效率。
[0034]
进一步地,在上述相机与激光雷达的自动化联合标定方法中,所述步骤(2)包括:采用最小二乘法与ransac算法相结合的平面拟合算法对所述打在标定板上的点云数据进行平面拟合,先利用ransac算法从打在标定板上的点云数据中筛选出设定比例的点云,再利用最小二乘法对筛选出的设定比例的点云进行平面拟合得到标定板的空间平面,然后将标定板的空间平面对应的内点投影到标定板的空间平面上;其中,通过分别计算打在标定板上的点云数据到标定板的空间平面的距离,将距离≤设定值的点云数据作为标定板的空间平面对应的内点。
[0035]
这样做的有益效果是:采用最小二乘法与ransac算法相结合的平面拟合算法,能够平衡平面拟合的正确性与速度,将标定板的空间平面对应的内点投影到标定板的空间平面上,与直接将打在标定板上的点云数据投影到标定板的空间平面上相比,能够提高后续计算得到的特征点坐标的准确性。
[0036]
进一步地,在上述相机与激光雷达的自动化联合标定方法中,所述步骤(1)包括:对所述扫描得到的点云数据进行标定边界过滤;采用基于密度的聚类方法对进行标定边界过滤后的点云数据进行聚类,得到多个点云簇;根据激光雷达的扫描特性与标定板的几何特性对聚类得到的多个点云簇进行筛选,得到打在标定板上的点云数据;所述激光雷达的扫描特性为激光雷达的水平分辨率高于垂直分辨率,所述标定板的几何特性为标定板的长度、宽度和形状。
[0037]
进一步地,在上述相机与激光雷达的自动化联合标定方法中,所述基于密度的聚类方法为dbscan方法。
附图说明
[0038]
图1是现有技术中的相机与激光雷达联合标定中三维-二维特征点对的转换示意图;
[0039]
图2是本发明联合标定方法实施例中的相机与激光雷达联合标定中的数据采集示意图;
[0040]
图3是本发明联合标定方法实施例中标定板放置方式对特征点拟合结果的影响对比图;
[0041]
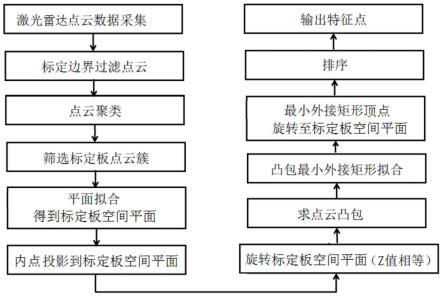
图4是本发明联合标定方法实施例中特征点在激光雷达坐标系下的三维坐标提取流程图。
具体实施方式
[0042]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
[0043]
联合标定方法实施例:
[0044]
如图2所示,本实施例中,进行相机与激光雷达的联合标定时,在相机与激光雷达同时能够感知到的区域放置矩形标定板,并且矩形标定板对角放置,将矩形标定板的顶点作为特征点,本实施例中将矩形标定板的4个顶点均作为特征点,进而标定板上有4个特征点。其中,矩形标定板可以是普通的矩形标定板,也可以是矩形棋盘格标定板。
[0045]
如图3所示,由于激光点云稀疏和无序,激光点云难以精准的打在所设定的特征点上,需要通过对标定板上的三维激光点云拟合恢复其形貌,从而获取特征点在激光雷达坐标系下的三维坐标,并且由于激光雷达垂直角分辨率低于水平分辨率,如果标定板竖直放置会有较大的拟合误差,尤其对于低线束激光雷达更为明显。因此,矩形标定板采取对角放置时的特征点拟合效果比竖直放置好。
[0046]
基于此,本实施例中,将矩形标定板对角放置,将矩形标定板的4个顶点均作为特征点,此时相机与激光雷达联合标定的具体过程如下:
[0047]
利用相机拍摄标定板的图像,基于得到的图像数据计算得到标定板上的每个特征点在像素坐标系下的二维坐标;
[0048]
利用激光雷达扫描标定板,基于扫描得到的点云数据计算得到标定板上的每个特征点在激光雷达坐标系下的三维坐标;
[0049]
将每个特征点对应的二维坐标和三维坐标组成一组点对数据,利用得到的所有点对数据基于pnp方法求解得到相机与激光雷达之间的外参。
[0050]
一般为了得到较好的联合标定结果,提高联合标定的精度,标定过程中会将矩形标定板随着标定支架移动多个位置,对于每个位置都需要计算标定板上各特征点对应的二维坐标和三维坐标,利用得到的所有点对数据基于pnp方法求解得到相机与激光雷达之间的外参。
[0051]
其中,本实施例方法的关键在于从采集的激光雷达点云数据(即扫描得到的点云数据)中自动提取出特征点在激光雷达坐标系下的三维坐标,如图4所示,特征点在激光雷达坐标系下的三维坐标的提取过程具体如下:
[0052]
1)对扫描得到的点云数据进行筛选得到打到标定板上的点云数据;
[0053]
考虑到利用激光雷达对标定板进行扫描时,不仅会扫描到标定板还会扫描到标定板周围的空间,因此扫描得到的点云数据实际上包含打到标定板上的点云数据和标定板周围空间的点云数据,而标定板周围空间的点云数据会对联合标定结果造成干扰,因此需要对扫描得到的点云数据进行筛选得到打到标定板上的点云数据,以提高联合标定的精度。
[0054]
该步骤的具体实现过程如下:
[0055]
(1)利用阈值过滤方法对扫描得到的点云数据进行标定边界过滤;
[0056]
通过对扫描得到的点云数据进行标定边界过滤,仅保留指定边界内的点云数据,使进行标定边界过滤后的点云数据中包含的标定板周围空间的点云数据量大幅减少,以减少点云量和降低点云聚类干扰,提高程序处理速度;例如,若扫描得到的点云数据是标定板及其周围10m空间的点云数据,可以通过进行标定边界过滤,使进行标定边界过滤后的点云
数据中仅包含标定板及其周围1m空间的点云数据;
[0057]
(2)采用具有噪声的基于密度的聚类方法(density-based spatial clustering of applications with noise,dbscan)对步骤(1)中进行标定边界过滤后的点云数据进行聚类,聚类完成后得到多个点云簇;根据激光雷达的扫描特性与标定板的几何特性对聚类得到的多个点云簇进行筛选,得到标定板对应的点云簇(即标定板点云簇),标定板点云簇对应的点云数据即为打在标定板上的点云数据。
[0058]
其中,激光雷达的扫描特性为:激光雷达的水平分辨率高于垂直分辨率;标定板的几何特性为:标定板的长度、宽度和形状;由于本实施例的标定板为矩形标定板,因此在筛选点云簇时,如果某个点云簇的形状不是矩形或者某个点云簇的大小与标定板大小明显不同,那么该点云簇就不是标定板点云簇。
[0059]
作为其他实施方式,还可以使用现有其他的基于密度的聚类方法替代dbscan方法。
[0060]
2)从打在标定板上的点云数据中提取特征点在激光雷达坐标系下的三维坐标;该步骤的具体实现过程如下:
[0061]
(1)采用最小二乘法与随机抽样一致算法(random sample consensus,ransac)相结合的平面拟合算法,对打在标定板上的点云数据进行平面拟合,得到激光雷达坐标系下标定板的空间平面;
[0062]
由于激光雷达测距精度的原因,标定板上的激光点云是基于标定板前后跳动的,也就是说,步骤1)中获取的打在标定板上的点云数据中仍可能会包含一定的噪点,考虑到:最小二乘法拟合平面速度较快,但最小二乘法易受噪点的影响,尤其低线束激光雷达受到的影响较大;ransac算法具有抗噪性,但目前ransac算法在拟合平面时每次仅选用三个点进行平面拟合,需要很大的迭代次数才能找到最优平面,因此本实施例中将两种算法结合,先利用ransac算法从打在标定板上的点云数据中筛选出一定数量的点云数据,再利用最小二乘法对筛选出的一定数量的点云数据进行拟合,迭代求取最优平面,将最优平面作为标定板的空间平面可以平衡平面拟合的精度与速度,其中ransac中的阈值可根据激光雷达的测距精度设定,一般可设置为2-5cm。
[0063]
本实施例中,采用最小二乘法与ransac算法相结合的平面拟合算法进行标定板空间平面的拟合,具体过程为:先利用ransac算法从打在标定板上的点云数据中筛选出设定比例(根据实际需要设置)的点云;再利用最小二乘法对筛选出的设定比例的点云进行平面拟合得到标定板的空间平面。
[0064]
例如,假设打在标定板上的点云数据共有100个点,先利用ransac算法从这100个点中筛选出80%的点(即筛选出80个点),再利用最小二乘法对这80个点进行平面拟合,迭代求取最优平面,假设迭代100次停止,每次迭代都拟合出一个平面,则迭代100次共拟合出100个平面,将这100个平面中内点最多的平面作为最优平面,将最优平面作为标定板的空间平面。其中,对于拟合得到的每个平面,分别计算打在标定板上的点云数据距该平面的距离,将距离≤设定值(根据实际需要设置)的点云数据作为该平面对应的内点。
[0065]
(2)将标定板的空间平面对应的内点投影到标定板的空间平面上;
[0066]
其中,通过分别计算打在标定板上的点云数据到标定板的空间平面的距离,将距离≤设定值的点云数据作为标定板的空间平面对应的内点。
[0067]
(3)对标定板的空间平面及投影到该平面上的点云数据进行刚性旋转,旋转到z坐标值相等的三维平面;其中,刚性旋转就是刚性物体旋转,类似打开笔记本时的旋转。
[0068]
其中,通过计算标定板空间平面的法向量与z坐标轴的夹角,将标定板空间平面刚性旋转该夹角,使旋转后的标定板空间平面与z坐标轴垂直,使旋转后的标定板空间平面中各点云数据的z坐标值都相等,从而将标定板空间平面及投影到该平面上的点云数据旋转到z坐标值相等的三维平面。
[0069]
将标定板空间平面及投影到该平面上的点云数据旋转到z坐标值相等的三维平面的目的是:后续利用的凸包最小外接矩形拟合算法是针对二维数据的,而标定板上的点云数据是三维空间的,因此需要将标定板上的三维点云数据转换为二维点云数据,但是如果直接将标定板上三维点云数据的某个维度的信息去掉,仅根据剩余两个维度的信息则无法完全反映出标定板矩形的特性;本实施例通过将标定板空间平面及投影到该平面上的点云数据旋转到z坐标值相等的三维平面,从而保证三维平面上所有三维点云数据的z坐标值都一样,就可以通过忽略z坐标值将三维平面上的三维点云数据等同于二维点云数据,后续再将z坐标值补全,可有效避免三维信息直接转二维信息过程中有用信息的丢失,能更好的保留标定板上点云的几何特性,保证后续计算得到的特征点坐标的准确性。
[0070]
(4)取步骤(3)中旋转到三维平面上的三维点云数据,通过去除这些三维点云数据的z坐标值得到二维点云数据集,求该二维点云数据集的凸包;
[0071]
(5)求步骤(4)中凸包的最小外接矩形,并计算得到该最小外接矩形的四个顶点的二维坐标;
[0072]
本实施例基于标定板的矩形特性利用凸包最小外接矩形拟合算法拟合凸包的最小外接矩形。
[0073]
(6)利用去除的z坐标值补全步骤(5)中得到的最小外接矩形各个顶点的第三维信息,得到最小外接矩形各个顶点的三维坐标,并将最小外接矩形各个顶点的三维坐标旋转到标定板的空间平面,得到最小外接矩形各个顶点在激光雷达坐标系下的三维坐标,并将最小外接矩形各个顶点在激光雷达坐标系下的三维坐标作为标定板上的各特征点在激光雷达坐标系下的三维坐标。
[0074]
其中,进行旋转前,可以先用z坐标值补充最小外接矩形的四个顶点的第三维信息,得到最小外接矩形的四个顶点的三维坐标,然后将最小外接矩形的四个顶点的三维坐标旋转到标定板的空间平面,得到最小外接矩形的四个顶点在激光雷达坐标系下的三维坐标(简称四个激光雷达坐标系下的三维坐标);最后,结合这四个激光雷达坐标系下的三维坐标的空间位置关系,以及标定板上各特征点的空间位置关系,对得到的四个激光雷达坐标系下的三维坐标按照上、下、左、右的顺序排序,将这四个激光雷达坐标系下的三维坐标与标定板上的各特征点一一对应,最终确定标定板上的每个特征点在激光雷达坐标系下的三维坐标。
[0075]
综上所述,本实施例的联合标定方法,利用普通的矩形标定板即可完成相机与激光雷达的自动化联合标定,无需借助特殊形状的标定物,操作简单,使用方便;其次,在提取特征点在激光雷达坐标系下的三维坐标时,先将标定板的空间平面旋转到z坐标值相等的三维平面,再通过忽略z坐标值将三维平面上的三维点云数据等同于二维点云数据,基于二维点云数据集计算得到凸包的最小外接矩形各个顶点的二维坐标,再利用去除z坐标值补
全最小外接矩形各个顶点的第三维信息,基于最小外接矩形各个顶点的三维坐标计算得到标定板上的各特征点在激光雷达坐标系下的三维坐标,可有效避免三维信息转二维信息过程中有用信息的丢失,保证后续计算得到的特征点坐标的准确性,所获取的特征点坐标精度较高,能够提高联合标定的精度;最后,实现了激光雷达坐标系下特征点坐标的自动化提取,可保证标定精度,节省人力,特别针对批量车提高标定效率。另外,本实施例采用最小二乘法与ransac算法相结合的平面拟合算法,能够平衡平面拟合的正确性与速度,将标定板的空间平面对应的内点投影到标定板的空间平面上,与直接将打在标定板上的点云数据投影到标定板的空间平面上相比,能够提高后续计算得到的特征点坐标的准确性。
[0076]
作为其他实施方式,也可以将标定板空间平面及投影到该平面上的点云数据旋转到x坐标值相等的三维平面,相应地,此时通过去除该三维平面上的三维点云数据的x坐标值得到二维点云数据集,并利用去除的x坐标值补全最小外接矩形各个顶点的第三维信息;或者,也可以将标定板空间平面及投影到该平面上的点云数据旋转到y坐标值相等的三维平面,相应地,此时通过去除该三维平面上的三维点云数据的y坐标值得到二维点云数据集,并利用去除的y坐标值补全最小外接矩形各个顶点的第三维信息;类似地,只需要计算出标定板空间平面的法向量与x或y坐标轴的夹角,将标定板空间平面刚性旋转相应夹角即可将标定板空间平面及投影到该平面上的点云数据旋转到x或y坐标值相等的三维平面。
[0077]
作为其他实施方式,也可以利用现有的其他平面拟合算法对打在标定板上的点云数据进行平面拟合得到标定板的空间平面,例如最小二乘法;作为其他实施方式,也可以直接将打在标定板上的点云数据投影到标定板的空间平面上。
[0078]
通过激光雷达获取标定板特征点的方法实施例:
[0079]
本实施例的通过激光雷达获取标定板特征点的方法(以下简称本实施例方法)包括以下步骤:
[0080]
利用激光雷达扫描标定板,基于扫描得到的点云数据计算得到标定板上的每个特征点在激光雷达坐标系下的三维坐标;其中,标定板为矩形标定板,且对角放置在激光雷达能够感知到的区域,特征点为矩形标定板的顶点;
[0081]
其中,每个特征点在激光雷达坐标系下的三维坐标的计算过程包括:
[0082]
(1)对扫描得到的点云数据进行筛选得到打到标定板上的点云数据;
[0083]
(2)对打在标定板上的点云数据进行平面拟合,得到激光雷达坐标系下标定板的空间平面,并将打在标定板上的点云数据投影到标定板的空间平面上;
[0084]
(3)将标定板的空间平面及投影到该平面上的点云数据,旋转到x坐标值或y坐标值或z坐标值相等的三维平面;
[0085]
(4)取旋转到三维平面上的三维点云数据,通过相应去除这些三维点云数据的x坐标值或y坐标值或z坐标值得到二维点云数据集,求二维点云数据集的凸包,并求凸包的最小外接矩形,计算得到最小外接矩形各个顶点的二维坐标;
[0086]
(5)利用去除的x坐标值或y坐标值或z坐标值补全最小外接矩形各个顶点的第三维信息,得到最小外接矩形各个顶点的三维坐标,并将最小外接矩形各个顶点的三维坐标旋转到标定板的空间平面,得到最小外接矩形各个顶点在激光雷达坐标系下的三维坐标,将最小外接矩形各个顶点在激光雷达坐标系下的三维坐标作为标定板上的各特征点在激光雷达坐标系下的三维坐标。
[0087]
本实施例方法中特征点在激光雷达坐标系下的三维坐标的计算过程与联合标定方法实施例中特征点在激光雷达坐标系下的三维坐标的计算过程相同,不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1