修正RTK移动站差分方程的浮点解坐标的解算方法与流程
修正rtk移动站差分方程的浮点解坐标的解算方法
技术领域
1.本发明涉及rtk差分定位系统精确定位技术,特别是一种修正rtk移动站差分方程的浮点解坐标的解算方法。
背景技术:
2.rtk定位技术具有作业效率高,拥有较高的定位精度,安全可靠的数据,误差积累少的优点,并且此定位技术要求的作业条件低,设备操作简单,高度集成化,具有较强的数据处理能力。但rtk技术存有一些缺陷,受卫星状态的限制,城市中的建筑密集区或者高山峡谷自然环境中,卫星信号出现被遮蔽或遮蔽时间较长的情况下,造成卫星失锁,影响整周模糊度的初始化,导致定位精度不高甚至失败;受天空环境影响,若电离层干扰情况严重,使移动站和基准站的公用卫星数少,导致无法进行定位;受到数据传输链路上障碍物的干扰和限制,如高山、高大建筑物,或者在数据传输链路范围内有高频信号源的干扰,使基准站与移动站之间的信号在传输过程中产生严重衰减,影响定位精度。
3.多普勒测速法是基于严格的多普勒测速数学模型,多普勒观测值在数值表现上为瞬时载波相位的变化率且独立于载波相位的观测值,不因载波相位发生周跳而产生变化,因此使用多普勒观测值得到接收机运动速度。
4.多普勒测速精度不仅受接收机钟差变化率、卫星钟差变化率和电离层、对流层时延变化率等影响,还受观测噪声的影响。载体在运动条件下,由于周围建筑物、树木等物体的遮挡,观测数据的噪声通常比静态条件下的大。观测噪声是影响测速的主要误差来源。为了获得高精度的速度,需要降低观测噪声对多普勒测速的精度影响。
5.在实际的rtk测量工作中,rtk浮点解模式主要是因为gps信号不好或者星况不好时整周模糊度解算不成功导致的。rtk定位算法的核心是载波相位整周模糊度固定技术,但该技术易受导航卫星故障、使用环境变化等因素的影响,从而导致模糊度固定失败。传统的rtk定位算法选择固定观测历元中所有的载波相位整周模糊度,但在实际应用过程中,由于导航卫星故障或者卫导系统使用环境恶化,造成卫导观测量测量精度也随之降低,使得lambda算法无法完全正确地固定出所有的载波相位整周模糊度。
6.方差作为衡量观测值精度高低的指标,也体现了模糊度浮点解与固定解的接近程度。方差较小的模糊度浮点解,意味着更接近固定解,整周模糊度解正确固定的可能性越大。
技术实现要素:
7.为了解决上述问题,本发明提出了一种修正rtk移动站差分方程的浮点解坐标的解算方法,以使浮点解坐标更接近固定解坐标,使接收机精确定位更稳定。
8.为了实现上述目的,本发明提出的修正rtk移动站差分方程的浮点解坐标的解算方法,其特征在于,包括以下步骤:(1)采用多普勒频移测速获得接收机的移动速度;(2)利用上一个解算出的固定解坐标和当前rtk移动站差分方程的浮点解坐标,求接收机在上一
个解算时刻和当前时刻之间的平均运动速度;(3)利用步骤(1)获得的接收机的移动速度与步骤(2)计算出的平均运动速度的差值,来修正当前差分方程的浮点解坐标。
9.本发明采用多普勒频移测速可以获得接收机精确的速度,利用两个速度的差值修正当前差分方程的浮点解坐标,使浮点解坐标更接近固定解坐标,提高整周模糊度求解效率,从而实现在低动态情况下,rtk差分系统不增加其他辅助定位技术,充分利用从卫星信号获取的数据信息,以减少复杂环境对定位精度的影响,实现载体精确实时定位。
具体实施方式
10.修正rtk移动站差分方程的浮点解坐标的解算方法,包括以下步骤。
11.(1)采用多普勒频移测速获得接收机的移动速度。
12.一个静止不动的信号发射塔播发频率为f的信号,如果载体流动接收站以速度v运行,那么载体流动接收站接收到的信号频率fr不是信号的发射频率f,而是f+fd,将这种信号接收频率fr随信号发射源与载体流动接收站之间的相对运动而发生变化的现象称之为多普勒效应,而将fd称为多普勒频移值。多普勒频移值fd等于接收机接受到卫星信号频率fr与卫星的信号发射频率f之间的差值:
13.fd=f
r-f
ꢀꢀꢀ
(1)
14.从电磁传播的基本理论出发,多普勒频移值fd计算公式为:
[0015][0016]
其中,vs为卫星的运行速度;λ为卫星发射载波信号波长;v为接收机的速度;为接收机向卫星靠近的距离变化率。
[0017]
伪距观测方程式为:
[0018][0019]
其中,ρn是第n颗卫星到接收机接收站的伪距观测值;rn是第n颗卫星到接收机的真实几何距离;δtr是接收机接受钟差;δtn是第n颗卫星的钟差;in是第n颗卫星到接收机传播路径上的电离层延时量;tn是第n颗卫星信号到接收机传播路径上的对流层延时量;为误差总和,包括卫星轨道误差、多径误差和接收机内部噪声。
[0020]
将伪距观测方程式对时间求导,得到:
[0021][0022]
其中,是第n颗卫星到接收机接收站的伪距观测值变化率;是第n颗卫星到接收机的几何距离变化率;是未知接收机时钟频漂;是第n颗卫星的时钟频漂;是电离层延时变化率;是对流层延时变化率。
[0023]
第n颗卫星到接收机的几何距离变化率与接收机相对卫星的运行速度之间的关系为:
[0024][0025]
vn为第n颗卫星的运动速度;ln是接收机到第n颗卫星的方向余弦;v=(v
x
,vy,vz)为
求解的接收机的移动速度。
[0026]
接收机接收到卫星信号,进行伪码相位和开普勒频移捕获,根据获得的导航电文解算的卫星速度、接收机到卫星的方向余弦、卫星钟差速度偏移量数据,求解第n颗卫星的地心地固坐标系三维坐标为(xn,yn,zn)。
[0027]
接收机的地心地固坐标系三维浮点解坐标位置(x,y,z),接收机利用基站传输过来的观测数据差分求解其地心地固坐标系三维浮点解坐标位置(x,y,z)。求第n颗卫星到接收机处观测矢量的长度:
[0028][0029]
接收机到第n颗卫星的方向余弦为:
[0030][0031]
接收机精确测量的第n颗卫星多普勒频移能体现伪距观测值的变化率两者的大小关系为:
[0032]
将公式(4)和(5)带入(8)中,电离层延时变化率和对流层延时变化率可以忽略不计。得到定速方程式:
[0033][0034]
上式未知量有v、和其他参数均已知。
[0035]
当接收机接收到n(n≥4)个卫星信号,获得n个原始多普勒测量值,n个方程组成一个定速方程式矩阵方程:
[0036][0037]
式中
[0038][0039]
其中,g由卫星和接收机在大地坐标系下坐标得到,利用导航电文解算的卫星速度、接收机到卫星的方向余弦ln、卫星钟差速度偏移量解算得到
[0040]
当卫星数目多余四颗,通过kalman滤波和最小二乘法,求接收机速度的方程为:
[0041][0042]
用卡尔曼滤波求解速度,通过卡尔曼滤波降低噪声影响。卡尔曼kalman滤波是一种递推线性无偏最小方差估计方法,通过系统的状态转移方程,根据前一时刻的状态估值
和当前时刻的观测值递推估计新的状态估计值,进而可以降低误差总和的影响。
[0043]
设k时刻的状态量
[0044][0045]
式中,(v
x v
y vz)为k时刻速度,(a
x a
y az)为k时刻加速度。
[0046]
初始化状态量x=[0,0,0,0,0,0,0],后验均方误差阵pk初始化为主对角线值为100的7阶方阵。
[0047]
采用卫星高度角加权模型设置测量噪声nk协方差阵r,即:
[0048][0049]
式中,系数a为载波相位噪声系数,根据经验值,选择系数a=3mm,θi为第i个卫星高度角,则测量噪声只是卫星角度的函数,由于时间差分将会放大噪声方差为原来的2倍,因此系数需要乘2。
[0050]
选择每颗卫星过程噪声都服从相互独立且均值为0,方差为0.005的正态分布,即
[0051][0052]
建立状态转移方程:
[0053][0054]
式中,x
k|k-1
状态预测值,x
k-1|k-1
是t-1时刻卡尔曼滤波最有估计值,w
k-1
是方差为的过程噪声,为7
×
7的状态转移矩阵:
[0055][0056]
式中,i表示单位矩阵,δt表示采样间隔。
[0057]
建立观测方程:
[0058]
zk=hx
k|k
+nkꢀꢀꢀ
(14)
[0059]
式中,h为测量矩阵,x
k|k
是t-1时刻卡尔曼滤波误差估计值,nk为方差为为方差为的测量噪声,为测量残差。
[0060]
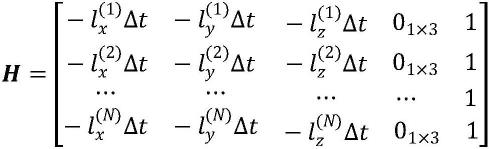
所述测量矩阵h计算公式为:
[0061]
[0062]
假定每个卫星观测值噪声都一样,计算上一次的误差协方差p
k|k-1
的计算公式为:
[0063][0064]
计算卡尔曼增益kk:
[0065]kk
=p
k|k-1ht
(hp
k|k-1ht
+r)-1
ꢀꢀꢀ
(16)
[0066]
其中,p
k|k-1
为状态量估计协方差矩阵,由k-1时刻的测量值计算得到,r为测量噪声nk协方差阵。
[0067]
通过卡尔曼滤波其状态更新方程矫正更新k时刻的状态量x
k|k
:
[0068]
x
k|k
=x
k|k-1
+kk·
[z
k-hx
k|k-1
]
ꢀꢀꢀ
(17)
[0069]
式中,kk卡尔曼滤波增益,zk为实际误差测量值,x
k|k-1
为一步预测状态值。
[0070]
线性化状态方程得到协方差矩阵p
k|k
,更新协方差矩阵p
k|k
:
[0071]
p
k|k
=(l-kkh)p
k|k-l
ꢀꢀꢀ
(18)
[0072]
其中i为7*7的单位矩阵。
[0073]
通过迭代上述kalman滤波的预测和校正递推过程,可以解得接收机的速度状态量v=[v
x v
y vz]。
[0074]
(2)利用上一个解算出的固定解坐标和当前rtk移动站差分方程的浮点解坐标,求接收机在上一个解算时刻和当前时刻之间的平均运动速度。
[0075]
接收机保存上一次得到固定解坐标r1=[x
1 y
1 z1]
t
和对应时刻t1,t2当前时刻rtk移动站差分方程的浮点解坐标计算接收机在wgs-84坐标系下t1时刻与t2时刻之间的平均速度:
[0076][0077]
(3)利用步骤(1)计算出的接收机的移动速度与步骤(2)计算出的平均运动速度的差值修正当前差分方程的浮点解坐标。
[0078]
t1与t2间隔较小,载体的动态情况不是很大的情况下,步骤(1)中由多普勒频移测速得到的接收机的移动速度v=[v
x v
y vz]可以作为接收机精确的瞬时速度。接收机的移动速度v=[v
x v
y vz]与步骤(2)中计算出的在wgs-84坐标系下在t1时刻与t2时刻之间的平均速度之间的速度误差为:
[0079][0080]
以速度误差修正位置误差的关系式为:
[0081][0082]
将上式改写成wsg-84坐标系中分量形式为:
[0083][0084]
从而求得修正后的浮点解坐标r2=[x
2 y
2 z2]
t
,使用修正后的浮点解坐标搜索整
周模糊度。
[0085]
本发明采用多普勒频移测速,通过卡尔曼滤波降低噪声影响,可以获得接收机精确的速度,同时接收机利用上一个解算出的固定解坐标和当前差分方程的浮点解坐标求接收机的平均运动速度,利用两个速度的差值修正当前差分方程的浮点解坐标,使浮点解坐标更接近固定解坐标,提高整周模糊度求解效率,从而实现在低动态情况下,rtk差分系统不增加其他辅助定位技术,充分利用从卫星信号获取的数据信息,以减少复杂环境对定位精度的影响,实现载体精确实时定位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1