车辆的定位方法、装置、电子设备及计算机可读存储介质与流程
[0001]
本申请涉及定位技术领域,具体而言,本申请涉及一种车辆的定位方法、装置、电子设备及计算机可读存储介质。
背景技术:
[0002]
gnss(global navigation satellite system,全球导航卫星系统),是能在地球表面或近地空间的任何地点为用户提供全天候的三维坐标和速度以及时间信息的空基无线电导航定位系统,可以用于车辆定位。
[0003]
现有的车辆定位方法在低精度gnss情况下存在以下问题:1)由于现有的技术在解算位姿的时候依赖初值,当gnss误差较大的时候,难以提供正确的初值,导致定位的结果会陷入局部最优,从而定位在错误的车道上,导致定位精度较差。比如车辆在辅路的时候,会定位到主路上去;2)如若要获得较好的初值,需要以gnss信息为中心随机生成足够多的采样点,通过以每个采样点为初值,计算地图匹配定位的结果。但是大量的采样点计算会降低算法的效率,甚至无法实时地输出定位结果。
技术实现要素:
[0004]
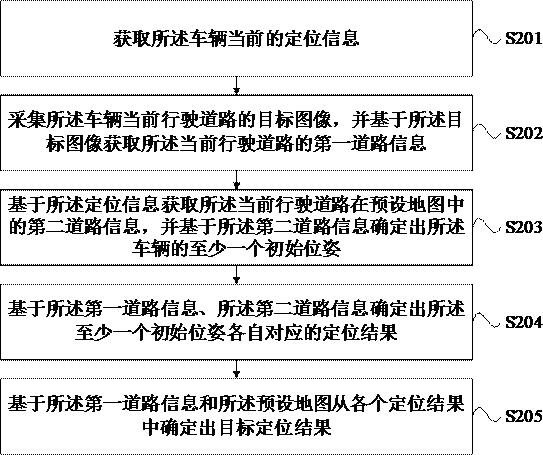
本申请提供了一种车辆的定位方法、装置、电子设备及计算机可读存储介质,可以解决现有的车辆定位精度较差、效率较低的问题。所述技术方案如下:一方面,提供了一种车辆的定位方法,该方法包括:获取所述车辆当前的定位信息;采集所述车辆当前行驶道路的目标图像,并基于所述目标图像获取所述当前行驶道路的第一道路信息;基于所述定位信息获取所述当前行驶道路在预设地图中的第二道路信息,并基于所述第二道路信息确定出所述车辆的至少一个初始位姿;基于所述第一道路信息、所述第二道路信息确定出所述至少一个初始位姿各自对应的定位结果;基于所述第一道路信息和所述预设地图从各个定位结果中确定出目标定位结果。
[0005]
在一个或多个实施例中,所述采集所述车辆当前行驶道路的目标图像,并基于所述目标图像获取所述当前行驶道路的第一道路信息,包括:通过所述车辆携带的图像采集设备采集得到所述当前行驶道路的目标图像;对所述目标图像进行车道线识别,将识别得到的至少一条识别车道线作为所述第一道路信息。
[0006]
在一个或多个实施例中,所述预设地图包括至少一条车道线和至少一条车道中心线;每条车道线由至少一个车道线离散点组成,每条车道中心线由至少一个车道中心线离散点组成;
所述基于所述定位信息获取所述当前行驶道路在预设地图中的第二道路信息,包括:确定出所述定位信息在所述预设地图中对应的位置点,并确定出在所述位置点预设距离内的至少一条目标车道线和至少一条目标车道中心线;从所述至少一条目标车道线的各个车道线离散点中,确定出与所述位置点的距离不超过预设距离的目标车道线离散点,得到车道线离散点集合;从每条目标车道中心线的至少一个车道中心线离散点中,分别确定出与所述位置点的距离不超过所述预设距离,且所述距离最小的目标车道中心线离散点,得到车道中心线离散点集合;将所述至少一条目标车道线、所述至少一条目标车道中心线、所述车道线离散点集合,以及所述车道中心线离散点集合作为所述第二道路信息。
[0007]
在一个或多个实施例中,所述基于所述第二道路信息确定出所述车辆的至少一个初始位姿,包括:确定所述车辆相对于所述定位信息的旋转矩阵;将所述旋转矩阵与车道中心线离散点集合中的至少一个目标车道中心线离散点分别进行组合,得到至少一个第一位姿矩阵,并将所述至少一个第一位姿矩阵作为初始位姿。
[0008]
在一个或多个实施例中,所述确定出所述车辆相对于所述定位信息的旋转矩阵,包括:基于任一条目标车道中心线的延伸方向确定出第一向量;对车道线离散点集合中的各个目标车道线离散点进行拟合,得到第二向量;基于所述第一向量与所述第二向量进行运算,得到第三向量;将所述第一向量、所述第二向量,以及所述第三向量进行组合,得到所述旋转矩阵。
[0009]
在一个或多个实施例中,所述基于所述第一道路信息、所述第二道路信息确定出所述至少一个初始位姿各自对应的定位结果,包括:将旋转矩阵与车道线离散点集合中的至少一个目标车道线离散点分别进行组合,得到至少一个第二位姿矩阵;根据预设的投影模型计算出至少一个目标车道线离散点在所述目标图像中对应的至少一个第一投影点;确定出所述至少一个第一投影点在所述目标图像中各自对应的车道像素点;所述车道像素点为所述目标图像中属于识别车道线的像素点;计算出所述至少一个第一投影点与各自对应的车道像素点的第一距离;基于所述至少一个第二位姿矩阵和所述至少一个第一距离,通过目标函数计算得到所述至少一个初始位姿各自对应的实际位姿,并将各个实际位姿作为定位结果。
[0010]
在一个或多个实施例中,基于所述第一道路信息和所述预设地图从各个定位结果中确定出目标定位结果,包括:根据所述投影模型计算出所述预设地图中各个定位结果在所述目标图像中各自对应的第二投影点;计算出各个第二投影点与各个车道像素点的第二距离;将最小第二距离对应的定位结果作为所述目标定位结果。
[0011]
另一方面,提供了一种车辆的定位装置,该装置包括:
定位信息获取模块,用于获取所述车辆当前的定位信息;第一道路信息获取模块,用于采集所述车辆当前行驶道路的目标图像,并基于所述目标图像获取所述当前行驶道路的第一道路信息;第二道路信息获取模块,用于基于所述定位信息获取所述当前行驶道路在预设地图中的第二道路信息;初始位姿确定模块,用于基于所述第二道路信息确定出所述车辆的至少一个初始位姿;定位结果确定模块,用于基于所述第一道路信息、所述第二道路信息确定出所述至少一个初始位姿各自对应的定位结果;筛选模块,用于基于所述第一道路信息和所述预设地图从各个定位结果中确定出目标定位结果。
[0012]
在一个或多个实施例中,所述第一道路信息获取模块,包括:采集子模块,用于通过所述车辆携带的图像采集设备采集得到所述当前行驶道路的目标图像;识别子模块,用于对所述目标图像进行车道线识别,将识别得到的至少一条识别车道线作为所述第一道路信息。
[0013]
在一个或多个实施例中,所述预设地图包括至少一条车道线和至少一条车道中心线;每条车道线由至少一个车道线离散点组成,每条车道中心线由至少一个车道中心线离散点组成;所述第二道路信息获取模块,包括:第一处理子模块,用于确定出所述定位信息在所述预设地图中对应的位置点,并确定出在所述位置点预设距离内的至少一条目标车道线和至少一条目标车道中心线;第二处理子模块,用于从所述至少一条目标车道线的各个车道线离散点中,确定出与所述位置点的距离不超过预设距离的目标车道线离散点,得到车道线离散点集合;第三处理子模块,用于从每条目标车道中心线的至少一个车道中心线离散点中,分别确定出与所述位置点的距离不超过所述预设距离,且所述距离最小的目标车道中心线离散点,得到车道中心线离散点集合;第四处理子模块,用于将所述至少一条目标车道线、所述至少一条目标车道中心线、所述车道线离散点集合,以及所述车道中心线离散点集合作为所述第二道路信息。
[0014]
在一个或多个实施例中,所述初始位姿确定模块,包括:旋转矩阵确定子模块,用于确定所述车辆相对于所述定位信息的旋转矩阵;第一生成子模块,用于将所述旋转矩阵与车道中心线离散点集合中的至少一个目标车道中心线离散点分别进行组合,得到至少一个第一位姿矩阵,并将所述至少一个第一位姿矩阵作为初始位姿。
[0015]
在一个或多个实施例中,所述旋转矩阵确定子模块,包括:第一向量确定单元,用于基于任一条目标车道中心线的延伸方向确定出第一向量;第二向量确定单元,用于对车道线离散点集合中的各个目标车道线离散点进行拟合,得到第二向量;第三向量确定单元,用于基于所述第一向量与所述第二向量进行运算,得到第三向量;
生成单元,用于将所述第一向量、所述第二向量,以及所述第三向量进行组合,得到所述旋转矩阵。
[0016]
在一个或多个实施例中,所述定位结果确定模块,包括:第二生成子模块,用于将旋转矩阵与车道线离散点集合中的至少一个目标车道线离散点分别进行组合,得到至少一个第二位姿矩阵;第一计算子模块,用于根据预设的投影模型计算出至少一个目标车道线离散点在所述目标图像中对应的至少一个第一投影点;第五处理子模块,用于确定出所述至少一个第一投影点在所述目标图像中各自对应的车道像素点;所述车道像素点为所述目标图像中属于识别车道线的像素点;第二计算子模块,用于计算出所述至少一个第一投影点与各自对应的车道像素点的第一距离;第六处理子模块,用于基于所述至少一个第二位姿矩阵和所述至少一个第一距离,通过目标函数计算得到所述至少一个初始位姿各自对应的实际位姿,并将各个实际位姿作为定位结果。
[0017]
在一个或多个实施例中,筛选模块,包括:第三计算子模块,用于根据所述投影模型计算出所述预设地图中各个定位结果在所述目标图像中各自对应的第二投影点;第四计算子模块,用于计算出各个第二投影点与各个车道像素点的第二距离;第五处理子模块,用于将最小第二距离对应的定位结果作为所述目标定位结果。
[0018]
另一方面,提供了一种电子设备,该电子设备包括:处理器、存储器和总线;所述总线,用于连接所述处理器和所述存储器;所述存储器,用于存储操作指令;所述处理器,用于通过调用所述操作指令,可执行指令使处理器执行如本申请的第一方面所示的车辆的定位方法对应的操作。
[0019]
另一方面,提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,该程序被处理器执行时实现本申请第一方面所示的车辆的定位方法。
[0020]
本申请提供的技术方案带来的有益效果是:获取所述车辆当前的定位信息,然后采集所述车辆当前行驶道路的目标图像,并基于所述目标图像获取所述当前行驶道路的第一道路信息,再基于所述定位信息获取所述当前行驶道路在预设地图中的第二道路信息,并基于所述第二道路信息确定出所述车辆的至少一个初始位姿,接送基于所述第一道路信息、所述第二道路信息确定出所述至少一个初始位姿各自对应的定位结果,进一步基于所述第一道路信息和所述预设地图从各个定位结果中确定出目标定位结果。这样,基于视觉感知获取车辆的当前行驶道路的第一道路信息,同时,基于定位信息提供车辆在预设地图中可能所在的至少一个车道,并获取各个车道各自对应的第二道路信息,然后对每个车道基于第一道路信息和各个第二道路信息进行匹配定位,最终得到车辆所在的正确的车道(定位结果)。
[0021]
进一步,即使是在定位信息弱的情况下,本发明实施例仍然可以先确定出多个可能存在误差的初始位姿,然后基于视觉感知和预设地图从多个初始位姿中确定出最终的定
位结果,不仅能够在定位信息弱的情况下,保证将车辆定位在正确的车道上,而且由于定位信息弱,导致采样点的数量较少,从而减少了计算量,进而提升了算法效率。
附图说明
[0022]
为了更清楚地说明本申请实施例中的技术方案,下面将对本申请实施例描述中所需要使用的附图作简单地介绍。
[0023]
图1为本申请一个实施例提供的一种车辆的定位方法的应用环境示意图;图2为本申请一个实施例提供的一种车辆的定位方法的流程示意图;图3为本申请图2中步骤s202的具体流程示意图;图4为本申请图2中步骤s203部分步骤的流程示意图一;图5为本申请图2中步骤s203部分步骤的流程示意图二;图6为本申请图5中步骤s501的具体流程示意图;图7为本申请图2中步骤s204的具体流程示意图;图8为本申请图2中步骤s205的具体流程示意图;图9为本申请又一实施例提供的一种车辆的定位装置的结构示意图;图10为本申请又一实施例提供的一种车辆的定位的电子设备的结构示意图。
具体实施方式
[0024]
下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本申请,而不能解释为对本发明的限制。
[0025]
本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本申请的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或无线耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。
[0026]
为使本申请的目的、技术方案和优点更加清楚,下面将结合附图对本申请实施方式作进一步地详细描述。
[0027]
本申请提供的车辆的定位方法、装置、电子设备和计算机可读存储介质,旨在解决现有技术的如上技术问题。
[0028]
下面以具体地实施例对本申请的技术方案以及本申请的技术方案如何解决上述技术问题进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例中不再赘述。下面将结合附图,对本申请的实施例进行描述。
[0029]
本发明实施例提供了一种车辆的定位方法的应用环境,参见图1,该应用环境包括:第一设备101和第二设备102。第一设备101和第二设备102之间通过网络连接,第一设备101为访问设备,第二设备102为被访问设备。第一设备101可以为车辆中的终端设备,第二设备102可以为服务器。在本发明实施例中,一种车辆的定位方法既可以在第一设备中执
行,也可以在第二设备中执行,在实际应用中可以根据实际需求进行设置,本发明实施例对此不作限制。
[0030]
其中,终端设备可以具有如下特点:(1)在硬件体系上,设备具备中央处理器、存储器、输入部件和输出部件,也就是说,设备往往是具备通信功能的微型计算机设备。另外,还可以具有多种输入方式,诸如键盘、鼠标、触摸屏、送话器和摄像头等,并可以根据需要进行调整输入。同时,设备往往具有多种输出方式,如受话器、显示屏等,也可以根据需要进行调整;(2)在软件体系上,设备必须具备操作系统,如windows mobile、symbian、palm、android、ios等。同时,这些操作系统越来越开放,基于这些开放的操作系统平台开发的个性化应用程序层出不穷,如通信簿、日程表、记事本、计算器以及各类游戏等,极大程度地满足了个性化用户的需求;(3)在通信能力上,设备具有灵活的接入方式和高带宽通信性能,并且能根据所选择的业务和所处的环境,自动调整所选的通信方式,从而方便用户使用。设备可以支持包括但不限于3gpp(3rd generation partnership project,第三代合作伙伴计划)、4gpp(4rd generation partnership project,第四代合作伙伴计划)、5gpp(5rd generation partnership project,第五代合作伙伴计划)、lte(long term evolution,长期演进)、wimax(world interoperability for microwave access,全球微波接入互操作性)的移动通信、基于tcp/ip(transmission control protocol/internet protocol,传输控制协议/网际协议)、udp(user datagram protocol,用户数据报协议)协议的计算机网络通信以及基于蓝牙、红外传输标准的近距无线传输方式,不仅支持语音业务,更支持多种无线数据业务;(4)在功能使用上,设备更加注重人性化、个性化和多功能化。随着计算机技术的发展,设备从“以设备为中心”的模式进入“以人为中心”的模式,集成了嵌入式计算、控制技术、人工智能技术以及生物认证技术等,充分体现了以人为本的宗旨。由于软件技术的发展,设备可以根据个人需求调整设置,更加个性化。同时,设备本身集成了众多软件和硬件,功能也越来越强大。
[0031]
服务器可以是独立的物理服务器,也可以是多个物理服务器构成的服务器集群或者分布式系统,还可以是提供云计算服务的云服务器。
[0032]
在上述应用环境中可以执行一种车辆的定位方法,如图2所示,该方法包括:步骤s201,获取车辆当前的定位信息;其中,定位信息可以是gnss信息。在本发明实施例中,车辆中的终端设备可以从gnss获取gnss信息作为定位信息,定位信息中包括但不限于wgs84(world geodetic system 1984,世界测地系统1984)的经纬度和高度。wgs84是一种坐标系统,坐标系统的原点为地球质心。
[0033]
进一步,获取定位信息可以是在车辆中的终端设备启动时获取。比如,终端设备通电后,就可以从gnss获取gnss信息了。
[0034]
需要说明的是,定位信息可以是gnss信息,包括但不限于gps(global positioning system,全球定位系统)、glonass(global navigation satellite system,全球卫星导航系统)、galileo(galileo satellite navigation system,伽利略卫星导航
系统)、bds(beidou navigation satellite system,中国北斗卫星导航系统)等用于定位的信息,在实际应用中可以根据实际需求进行设置,本发明实施例对此不作限制。
[0035]
步骤s202,采集车辆当前行驶道路的目标图像,并基于目标图像获取当前行驶道路的第一道路信息;在本发明实施例中,车辆中还可以安装图像采集设备,比如行车记录仪,用于采集车辆周围环境的目标图像,周围环境包括但不限于车辆的当前行驶道路。
[0036]
车辆在行驶的过程中,可以实时采集多张目标图像,也可以每隔预设时间段采集,比如每隔1秒采集一张目标图像,还可以通过其它方式采集目标图像,在实际应用中可以根据实际需求进行设置,本发明实施例对此不作限制。
[0037]
采集到目标图像后,车辆中的终端设备对该目标图像进行识别,获取当前行驶道路的第一道路信息。
[0038]
步骤s203,基于定位信息获取当前行驶道路在预设地图中的第二道路信息,并基于第二道路信息确定出车辆的至少一个初始位姿;车辆中的终端设备获取到定位信息之后,可以将该定位信息定位到预设地图中的当前行驶道路上,从而从预设地图中获取当前行驶道路的第二道路信息,并基于该第二道路信息确定出车辆的至少一个初始位姿。
[0039]
步骤s204,基于第一道路信息、第二道路信息确定出至少一个初始位姿各自对应的定位结果;在确定出第一道路信息、第二道路信息和至少一个初始位姿之后,就可以基于第一道路信息和第二道路信息确定出每个初始位姿各自对应的定位结果。其中,定位结果可以是每个初始位姿对应的精确的实际位姿。
[0040]
步骤s205,基于第一道路信息和预设地图从各个定位结果中确定出目标定位结果。
[0041]
确定出各个定位结果之后,即可基于第一道路信息和预设地图从各个定位结果中确定出目标定位结果,也就是预设地图中,与车辆在当前行驶道路所处的位置最接近的位姿。
[0042]
在本发明实施例中,获取车辆当前的定位信息,然后采集车辆当前行驶道路的目标图像,并基于目标图像获取当前行驶道路的第一道路信息,再基于定位信息获取当前行驶道路在预设地图中的第二道路信息,并基于第二道路信息确定出车辆的至少一个初始位姿,接送基于第一道路信息、第二道路信息确定出至少一个初始位姿各自对应的定位结果,进一步基于第一道路信息和预设地图从各个定位结果中确定出目标定位结果。这样,基于视觉感知获取车辆的当前行驶道路的第一道路信息,同时,基于定位信息提供车辆在预设地图中可能所在的至少一个车道,并获取各个车道各自对应的第二道路信息,然后对每个车道基于第一道路信息和各个第二道路信息进行匹配定位,最终得到车辆所在的正确的车道(定位结果)。
[0043]
进一步,即使是在定位信息弱的情况下,本发明实施例仍然可以先确定出多个可能存在误差的初始位姿,然后基于视觉感知和预设地图从多个初始位姿中确定出最终的定位结果,不仅能够在定位信息弱的情况下,保证将车辆定位在正确的车道上,而且由于定位信息弱,导致采样点的数量较少,从而减少了计算量,进而提升了算法效率。
[0044]
在另一个实施例中对图2所示的一种车辆的定位方法中的各个步骤进行详细说明。
[0045]
步骤s201,获取车辆当前的定位信息;其中,定位信息可以是gnss信息。在本发明实施例中,车辆中的终端设备可以从gnss获取gnss信息作为定位信息,定位信息中包括但不限于wgs84(world geodetic system 1984,世界测地系统1984)的经纬度和高度。wgs84是一种坐标系统,坐标系统的原点为地球质心。
[0046]
进一步,获取定位信息可以是在车辆中的终端设备启动时获取。比如,终端设备通电后,就可以从gnss获取gnss信息了。
[0047]
需要说明的是,定位信息可以是gnss信息,包括但不限于gps、glonass、galileo、bds等用于定位的信息,在实际应用中可以根据实际需求进行设置,本发明实施例对此不作限制。
[0048]
步骤s202,采集车辆当前行驶道路的目标图像,并基于目标图像获取当前行驶道路的第一道路信息;在本发明实施例中,车辆中还可以安装图像采集设备,比如行车记录仪,用于采集车辆周围环境的目标图像,周围环境包括但不限于车辆的当前行驶道路。
[0049]
车辆在行驶的过程中,可以实时采集多张目标图像,也可以每隔预设时间段采集,比如每隔1秒采集一张目标图像,还可以通过其它方式采集目标图像,在实际应用中可以根据实际需求进行设置,本发明实施例对此不作限制。
[0050]
采集到目标图像后,车辆中的终端设备对该目标图像进行识别,获取当前行驶道路的第一道路信息。
[0051]
在本发明一种优选实施例中,如图3所示,步骤s202包括:步骤s301,通过车辆携带的图像采集设备采集得到当前行驶道路的目标图像;步骤s302,对目标图像进行车道线识别,将识别得到的至少一条识别车道线作为第一道路信息。
[0052]
具体而言,图像采集设备可以在车辆当前行驶方向上采集当前行驶道路(也就是车辆前方的当前行驶道路)的目标图像,然后对目标图像进行车道线识别,得到至少一条识别车道线,并将至少一条识别车道线作为第一道路信息。
[0053]
其中,车道线识别可以采用图像与计算机视觉技术,当然,其它的车道线识别技术也是适用于本发明实施例的,在实际应用中可以根据实际需求进行设置,本发明实施例对此不作限制。
[0054]
步骤s203,基于定位信息获取当前行驶道路在预设地图中的第二道路信息,并基于第二道路信息确定出车辆的至少一个初始位姿;车辆中的终端设备获取到定位信息之后,可以将该定位信息定位到预设地图中的当前行驶道路上,从而从预设地图中获取当前行驶道路的第二道路信息,并基于该第二道路信息确定出车辆的至少一个初始位姿。
[0055]
其中,预设地图可以是高精度地图,该预设地图包括已标注的至少一条车道线和至少一条车道中心线;每条车道线由至少一个车道线离散点组成,每条车道中心线由至少一个车道中心线离散点组成。
[0056]
在本明实施例中,第一道路信息与第二道路信息的区别在于:第一道路信息是车辆在当前行驶道路上通过实际采集到的目标图像获取到的,而第二道路信息是基于车辆的定位信息从预设地图中获取到的。由于定位信息可能存在误差,所以会出现车辆实际在当前行驶道路的主路上行驶,但是将车辆定位到当前行驶道路的辅路上的情况。在这种情况下,第一道路信息和第二道路信息也会出现误差。
[0057]
在本发明一种优选实施例中,如图4所示,步骤s203中的基于定位信息获取当前行驶道路在预设地图中的第二道路信息,包括:步骤s401,确定出定位信息在预设地图中对应的位置点,并确定出在位置点预设距离内的至少一条目标车道线和至少一条目标车道中心线;步骤s402,从至少一条目标车道线的各个车道线离散点中,确定出与位置点的距离不超过预设距离的目标车道线离散点,得到车道线离散点集合;步骤s403,从每条目标车道中心线的至少一个车道中心线离散点中,分别确定出与位置点的距离不超过预设距离,且距离最小的目标车道中心线离散点,得到车道中心线离散点集合;步骤s404,将至少一条目标车道线、至少一条目标车道中心线、车道线离散点集合,以及车道中心线离散点集合作为第二道路信息。
[0058]
具体而言,终端设备获取到定位信息后,可以基于定位信息中的经纬度和高度在预设地图中确定出对应的位置点。
[0059]
需要说明的是,由于车辆中的终端设备可以实时获取定位信息,所以,终端设备可能连续获取到多个定位信息,而且多个定位信息不一定都相同,尤其是当终端设备的信息较弱时,多个定位信息之间可能存在较大误差。也就是说,终端设备可以获取到多个定位信息,然后从预设地图中对应地确定出多个位置点。
[0060]
然后针对每个位置点,确定出在该位置点预设距离内的至少一条目标车道线和至少一条目标车道中心线。比如,将某个位置点100米内的所有车道线和车道中心线分别作为目标车道线和目标车道中心线。当然,在实际应用中,预设距离可以根据实际需求进行设置,本发明实施例对此不作限制。
[0061]
由于目标车道线和目标车道中心线的完整长度通常是非常长的,在本发明实施例中并不需要使用完整的目标车道线和车道中心线,所以,针对每个位置点,确定出每条目标车道线中与该位置点的距离不超过预设距离的目标车道线离散点,得到该位置点对应的车道线离散点集合。
[0062]
比如,确定出某位置点100米距离内的三条目标车道线a、b、c,假设a包括完整的车道线离散点为a1~a5000,b包括完整的车道线离散点为b1~b5000,c包括完整的车道线离散点为c1~c5000。然后进一步确定出a中与该位置点100米距离内的目标车道线离散点为a1000~a1200,b中与该位置点100米距离内的目标车道线离散点为b1000~b1200,c中与该位置点100米距离内的目标车道线离散点为c1000~c1200,这样,就得到了该位置点对应的车道线离散点集合[a1000~a1200、b1000~b1200、c1000~c1200]。当然,车道线离散点的记录方式和车道线离散点集合的记录方式还可以采用其它方式,在实际应用中可以根据实际需求进行设置,本发明实施例对此不作限制。
[0063]
进一步,针对每个位置点,从每条目标车道中心线的至少一个车道中心线离散点
中,分别确定出与位置点的距离不超过预设距离,且距离最小的目标车道中心线离散点,得到车道中心线离散点集合。
[0064]
比如,确定出某位置点100米距离内的三条目标车道中心线d、e、f,假设d包括完整的车道中心线离散点为d1~d5000,e包括完整的车道中心线离散点为e1~e5000,f包括完整的车道中心线离散点为f1~f5000。然后确定出d中与该位置点100米距离内的目标车道中心线离散点为d1000~d1200,e中与该位置点100米距离内的目标车道中心线离散点为e1000~e1200,f中与该位置点100米距离内的目标车道中心线离散点为f1000~f1200。再从d1000~d1200中确定出与该位置点最近的目标车道中心线离散点为d1080,从e1000~e1200中确定出与该位置点最近的目标车道中心线离散点为e1080,从f1000~f1200中确定出与该位置点最近的目标车道中心线离散点为f1080,这样,就得到了该位置点对应的车道中心线离散点集合[d1080、e1080、f1080]。也就是说,一条目标车道中心线对应一个目标车道中心离散点。当然,车道中心线离散点的记录方式和车道中心线离散点集合的记录方式还可以采用其它方式,在实际应用中可以根据实际需求进行设置,本发明实施例对此不作限制。
[0065]
确定出各条目标车道线、各条目标车道中心线、车道线离散点集合,以及车道中心线离散点集合后,即可将至少一条目标车道线、至少一条目标车道中心线、车道线离散点集合,以及车道中心线离散点集合作为第二道路信息。
[0066]
在本发明一种优选实施例中,如图5所示,步骤s203中的基于第二道路信息确定出车辆的至少一个初始位姿,包括:步骤s501,确定车辆相对于定位信息的旋转矩阵;步骤s502,将旋转矩阵与车道中心线离散点集合中的至少一个目标车道中心线离散点分别进行组合,得到至少一个第一位姿矩阵,并将至少一个第一位姿矩阵作为初始位姿。
[0067]
具体而言,将第二道路信息中车道中心线离散点集合中的每个目标车道中心线离散点作为位置初值,同时获取车辆相对于该定位信息的旋转矩阵,在本申请的实施例中,可以是车辆相对于wgs84的旋转矩阵。然后将旋转矩阵与各个目标车道中心线离散点分别进行组合,从而得到各个第一位姿矩阵,并将各个第一位姿矩阵分别作为各个初始位姿。
[0068]
其中,位姿可以是图像采集设备在wgs84中的坐标,然后确定出坐标在预设地图中所处的车道,由于图像采集设备是安装在车辆中的,所以,确定出了图像采集设备所处的车道,也就确定出了车辆在预设地图中所处的车道。当目标车道线的数量大于等于2时,车道可以是任意相邻的两条目标车道线形成的区域;当目标车道线的数量小于2且大于0时,车道可以是目标车道线左边的区域或右边的区域。
[0069]
在本发明一种优选实施例中,如图6所示,步骤s501包括:步骤s601,基于任一条目标车道中心线的延伸方向确定出第一向量;步骤s602,对车道线离散点集合中的各个目标车道线离散点进行拟合,得到第二向量;步骤s603,基于第一向量与第二向量进行运算,得到第三向量;步骤s604,将第一向量、第二向量,以及第三向量进行组合,得到旋转矩阵。
[0070]
具体地,针对任一条目标车道中心线,通过其延伸方向确定出第一向量,记为p,然后对第二道路信息中车道线离散点集合中的所有目标车道线离散点进行拟合,得到道路地面的法向量,也就是第二向量,记为n,再将p和n进行叉乘,得到第三向量,记为h,将旋转矩阵记为r,则r=[p h n]。
[0071]
进一步,将任一目标车道中心线离散点记为p
i
,那么车道中心线离散点集合为[p1,p2,
…
,p
n
],将旋转矩阵与各个目标车道中心线离散点分别进行组合,得到的各个初始位姿可以记为:[p1,r],[p2,r],
…
,[p
n
,r]。
[0072]
其中,任一初始位姿优选为六自由度位姿。具体地,物体在空间具有六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。因此,要完全确定物体的位置,就需要知道这六个自由度。当然,任一初始位姿除了可以是六自由度位姿外,还可以是其它形式的位姿,在实际应用中可以根据实际需求进行设置,本发明实施例对此不作限制。
[0073]
步骤s204,基于第一道路信息、第二道路信息确定出至少一个初始位姿各自对应的定位结果;在确定出第一道路信息、第二道路信息和至少一个初始位姿之后,就可以基于第一道路信息和第二道路信息确定出每个初始位姿各自对应的定位结果。其中,定位结果可以是每个初始位姿对应的精确的实际位姿。
[0074]
在本发明一种优选实施例中,如图7所示,步骤s204包括:步骤s701,将旋转矩阵与车道线离散点集合中的至少一个目标车道线离散点分别进行组合,得到至少一个第二位姿矩阵;步骤s702,根据预设的投影模型计算出至少一个目标车道线离散点在目标图像中对应的至少一个第一投影点;步骤s703,确定出至少一个第一投影点在目标图像中各自对应的车道像素点;车道像素点为目标图像中属于识别车道线的像素点;步骤s704,计算出至少一个第一投影点与各自对应的车道像素点的第一距离;步骤s705,基于至少一个第二位姿矩阵和至少一个第一距离,通过目标函数计算得到至少一个初始位姿各自对应的实际位姿,并将各个实际位姿作为定位结果。
[0075]
为方便描述,在本发明实施例中,将任一目标车道线离散点记为q
i
,那么车道线离散点集合为[q1,q2,
…
,q
n
];将所有识别到的识别车道线的集合记为s。
[0076]
具体而言,将旋转矩阵与各个目标车道线离散点分别进行组合,得到各个第二位姿矩阵,记为x,那么x=[q
i
,r]。然后根据预设的相机投影模型,计算出每个目标车道线离散点在x下投影到目标图像中的第一投影点,任一第一投影点记为c
i
,那么每个目标车道线离散点各自对应的第一投影点的集合为[c1,c2,
…
,c
n
]。再确定出每个第一投影点在目标图像中各自对应的第一车道像素点,其中,车道像素点为目标图像中属于识别车道线的像素点。
[0077]
需要说明的是,第一投影点与第一车道像素点的对应关系可以基于该像素点在车道线中所处的行和列来确定,比如,某个第一投影点在预设地图上处于某条目标车道线的第二行第三列,那么,与该第一投影点对应的,是目标图像中与该条目标车道线对应的识别车道线中第二行第三列的像素点。当然,除了上述方式之外,还可以通过其它方式确定二者的对应关系,比如,基于任一像素点在wgs84中的坐标确定二者的对应关系,在实际应用中,可以根据实际需求进行设置,本发明实施例对此不作限制。
[0078]
然后,针对每个第一投影点,计算出其与对应的第一车道像素点的第一距离,再基于各个第二位姿矩阵和各个第一距离,记为r(c
i
,s
i
),通过目标函数计算得到每个初始位姿各自对应的实际位姿,并将各个实际位姿作为定位结果。
[0079]
其中,目标函数如公式(1)所示:公式(1);其中,。
[0080]
r
x
定义为:,lanewidth为当前车道宽度,r
x
表示车道中心线对车辆定位的约束残差,这个残差的设计保证了当前车道的初值优化的结果不会偏离当前车道,假设车道中心线为p
lane
,那么,d为车辆定位在wgs84坐标的x轴上的横向误差。
[0081]
r
y
定义为:,表示定位信息在wgs84坐标的y轴上对定位的约束残差,也就是车辆定位在wgs84坐标的y轴上的纵向误差。
[0082]
r
z
定义为:,表示预设地图的高程提供的对车辆定位的约束残差,也就是车辆定位在wgs84坐标的z轴上的垂直误差;h为基于预设地图计算得到的高程信息。
[0083]
σ
hd
为预设地图的加权系数,σ
x
为x的加权系数,σ
y
为y的加权系数,σ
z
为z的加权系数,各个加权系数可以根据实际经验进行设置。所以,在实际应用中,各个加权系数可以根据实际需求进行设置,本发明实施例对此不作限制。
[0084]
步骤s205,基于第一道路信息和预设地图从各个定位结果中确定出目标定位结果。
[0085]
确定出各个定位结果之后,即可基于第一道路信息和预设地图从各个定位结果中确定出目标定位结果,也就是预设地图中,与车辆在当前行驶道路所处的位置最接近的位姿。
[0086]
在本发明一种优选实施例中,如图8所示,步骤s205包括:步骤s801,根据投影模型计算出预设地图中各个定位结果在目标图像中各自对应的第二投影点;步骤s802,计算出各个第二投影点与各个车道像素点的第二距离;步骤s803,将最小第二距离对应的定位结果作为目标定位结果。
[0087]
具体而言,根据投影模型计算出预设地图中每个定位结果在目标图像中各自对应的第二投影点,然后采用公式(2)计算出每个第二投影点分别与各个车道像素点的第二距离:公式(2);
其中,。从而得到每个第二投影点分别对应的多个第二距离,即,一个第二投影点对应多个第二距离。然后,将cost最小的定位结果作为目标定位结果。
[0088]
在本发明实施例中,获取车辆当前的定位信息,然后采集车辆当前行驶道路的目标图像,并基于目标图像获取当前行驶道路的第一道路信息,再基于定位信息获取当前行驶道路在预设地图中的第二道路信息,并基于第二道路信息确定出车辆的至少一个初始位姿,接送基于第一道路信息、第二道路信息确定出至少一个初始位姿各自对应的定位结果,进一步基于第一道路信息和预设地图从各个定位结果中确定出目标定位结果。这样,基于视觉感知获取车辆的当前行驶道路的第一道路信息,同时,基于定位信息提供车辆在预设地图中可能所在的至少一个车道,并获取各个车道各自对应的第二道路信息,然后对每个车道基于第一道路信息和各个第二道路信息进行匹配定位,最终得到车辆所在的正确的车道(定位结果)。
[0089]
进一步,即使是在定位信息弱的情况下,本发明实施例仍然可以先确定出多个可能存在误差的初始位姿,然后基于视觉感知和预设地图从多个初始位姿中确定出最终的定位结果,不仅能够在定位信息弱的情况下,保证将车辆定位在正确的车道上,而且由于定位信息弱,导致采样点的数量较少,从而减少了计算量,进而提升了算法效率。
[0090]
图9为本申请又一实施例提供的一种车辆的定位装置的结构示意图,如图9所示,本实施例的装置可以包括:定位信息获取模块901,用于获取车辆当前的定位信息;第一道路信息获取模块902,用于采集车辆当前行驶道路的目标图像,并基于目标图像获取当前行驶道路的第一道路信息;第二道路信息获取模块903,用于基于定位信息获取当前行驶道路在预设地图中的第二道路信息;初始位姿确定模块904,用于基于第二道路信息确定出车辆的至少一个初始位姿;定位结果确定模块905,用于基于第一道路信息、第二道路信息确定出至少一个初始位姿各自对应的定位结果;筛选模块906,用于基于第一道路信息和预设地图从各个定位结果中确定出目标定位结果。
[0091]
在本发明一种优选实施例中,第一道路信息获取模块,包括:采集子模块,用于通过车辆携带的图像采集设备采集得到当前行驶道路的目标图像;识别子模块,用于对目标图像进行车道线识别,将识别得到的至少一条识别车道线作为第一道路信息。
[0092]
在本发明一种优选实施例中,预设地图包括至少一条车道线和至少一条车道中心线;每条车道线由至少一个车道线离散点组成,每条车道中心线由至少一个车道中心线离散点组成;第二道路信息获取模块,包括:第一处理子模块,用于确定出定位信息在预设地图中对应的位置点,并确定出在位置点预设距离内的至少一条目标车道线和至少一条目标车道中心线;
第二处理子模块,用于从至少一条目标车道线的各个车道线离散点中,确定出与位置点的距离不超过预设距离的目标车道线离散点,得到车道线离散点集合;第三处理子模块,用于从每条目标车道中心线的至少一个车道中心线离散点中,分别确定出与位置点的距离不超过预设距离,且距离最小的目标车道中心线离散点,得到车道中心线离散点集合;第四处理子模块,用于将至少一条目标车道线、至少一条目标车道中心线、车道线离散点集合,以及车道中心线离散点集合作为第二道路信息。
[0093]
在本发明一种优选实施例中,初始位姿确定模块,包括:旋转矩阵确定子模块,用于确定车辆相对于定位信息的旋转矩阵;第一生成子模块,用于将旋转矩阵与车道中心线离散点集合中的至少一个目标车道中心线离散点分别进行组合,得到至少一个第一位姿矩阵,并将至少一个第一位姿矩阵作为初始位姿。
[0094]
在本发明一种优选实施例中,旋转矩阵确定子模块,包括:第一向量确定单元,用于基于任一条目标车道中心线的延伸方向确定出第一向量;第二向量确定单元,用于对车道线离散点集合中的各个目标车道线离散点进行拟合,得到第二向量;第三向量确定单元,用于基于第一向量与第二向量进行运算,得到第三向量;生成单元,用于将第一向量、第二向量,以及第三向量进行组合,得到旋转矩阵。
[0095]
在本发明一种优选实施例中,定位结果确定模块,包括:第二生成子模块,用于将旋转矩阵与车道线离散点集合中的至少一个目标车道线离散点分别进行组合,得到至少一个第二位姿矩阵;第一计算子模块,用于根据预设的投影模型计算出至少一个目标车道线离散点在目标图像中对应的至少一个第一投影点;第五处理子模块,用于确定出至少一个第一投影点在目标图像中各自对应的车道像素点;车道像素点为目标图像中属于识别车道线的像素点;第二计算子模块,用于计算出至少一个第一投影点与各自对应的车道像素点的第一距离;第六处理子模块,用于基于至少一个第二位姿矩阵和至少一个第一距离,通过目标函数计算得到至少一个初始位姿各自对应的实际位姿,并将各个实际位姿作为定位结果。
[0096]
在本发明一种优选实施例中,筛选模块,包括:第三计算子模块,用于根据投影模型计算出预设地图中各个定位结果在目标图像中各自对应的第二投影点;第四计算子模块,用于计算出各个第二投影点与各个车道像素点的第二距离;第五处理子模块,用于将最小第二距离对应的定位结果作为目标定位结果。
[0097]
本实施例的车辆的定位装置可执行本申请第一个实施例所示的车辆的定位方法,其实现原理相类似,此处不再赘述。
[0098]
在本发明实施例中,获取车辆当前的定位信息,然后采集车辆当前行驶道路的目标图像,并基于目标图像获取当前行驶道路的第一道路信息,再基于定位信息获取当前行驶道路在预设地图中的第二道路信息,并基于第二道路信息确定出车辆的至少一个初始位
姿,接送基于第一道路信息、第二道路信息确定出至少一个初始位姿各自对应的定位结果,进一步基于第一道路信息和预设地图从各个定位结果中确定出目标定位结果。这样,基于视觉感知获取车辆的当前行驶道路的第一道路信息,同时,基于定位信息提供车辆在预设地图中可能所在的至少一个车道,并获取各个车道各自对应的第二道路信息,然后对每个车道基于第一道路信息和各个第二道路信息进行匹配定位,最终得到车辆所在的正确的车道(定位结果)。
[0099]
进一步,即使是在定位信息弱的情况下,本发明实施例仍然可以先确定出多个可能存在误差的初始位姿,然后基于视觉感知和预设地图从多个初始位姿中确定出最终的定位结果,不仅能够在定位信息弱的情况下,保证将车辆定位在正确的车道上,而且由于定位信息弱,导致采样点的数量较少,从而减少了计算量,进而提升了算法效率。
[0100]
本申请的又一实施例中提供了一种电子设备,该电子设备包括:存储器和处理器;至少一个程序,存储于存储器中,用于被处理器执行时,与现有技术相比可实现:在本发明实施例中,获取车辆当前的定位信息,然后采集车辆当前行驶道路的目标图像,并基于目标图像获取当前行驶道路的第一道路信息,再基于定位信息获取当前行驶道路在预设地图中的第二道路信息,并基于第二道路信息确定出车辆的至少一个初始位姿,接送基于第一道路信息、第二道路信息确定出至少一个初始位姿各自对应的定位结果,进一步基于第一道路信息和预设地图从各个定位结果中确定出目标定位结果。这样,基于视觉感知获取车辆的当前行驶道路的第一道路信息,同时,基于定位信息提供车辆在预设地图中可能所在的至少一个车道,并获取各个车道各自对应的第二道路信息,然后对每个车道基于第一道路信息和各个第二道路信息进行匹配定位,最终得到车辆所在的正确的车道(定位结果)。
[0101]
进一步,即使是在定位信息弱的情况下,本发明实施例仍然可以先确定出多个可能存在误差的初始位姿,然后基于视觉感知和预设地图从多个初始位姿中确定出最终的定位结果,不仅能够在定位信息弱的情况下,保证将车辆定位在正确的车道上,而且由于定位信息弱,导致采样点的数量较少,从而减少了计算量,进而提升了算法效率。
[0102]
在一个可选实施例中提供了一种电子设备,如图10所示,图10所示的电子设备10000包括:处理器10001和存储器10003。其中,处理器10001和存储器10003相连,如通过总线10002相连。可选地,电子设备10000还可以包括收发器10004。需要说明的是,实际应用中收发器10004不限于一个,该电子设备10000的结构并不构成对本申请实施例的限定。
[0103]
处理器10001可以是cpu,通用处理器,dsp,asic,fpga或者其他可编程逻辑器件、晶体管逻辑器件、硬件部件或者其任意组合。其可以实现或执行结合本申请公开内容所描述的各种示例性的逻辑方框,模块和电路。处理器10001也可以是实现计算功能的组合,例如包含一个或多个微处理器组合,dsp和微处理器的组合等。
[0104]
总线10002可包括一通路,在上述组件之间传送信息。总线10002可以是pci总线或eisa总线等。总线10002可以分为地址总线、数据总线、控制总线等。为便于表示,图10中仅用一条粗线表示,但并不表示仅有一根总线或一种类型的总线。
[0105]
存储器10003可以是rom或可存储静态信息和指令的其他类型的静态存储设备,ram或者可存储信息和指令的其他类型的动态存储设备,也可以是eeprom、cd-rom或其他光盘存储、光碟存储(包括压缩光碟、激光碟、光碟、数字通用光碟、蓝光光碟等)、磁盘存储介质或者其他磁存储设备、或者能够用于携带或存储具有指令或数据结构形式的期望的程序
代码并能够由计算机存取的任何其他介质,但不限于此。
[0106]
存储器10003用于存储执行本申请方案的应用程序代码,并由处理器10001来控制执行。处理器10001用于执行存储器10003中存储的应用程序代码,以实现前述任一方法实施例所示的内容。
[0107]
其中,电子设备包括但不限于:移动电话、笔记本电脑、数字广播接收器、pda(个人数字助理)、pad(平板电脑)、pmp(便携式多媒体播放器)、车载终端(例如车载导航终端)等等的移动终端以及诸如数字tv、台式计算机等等的固定终端。
[0108]
本申请的又一实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,当其在计算机上运行时,使得计算机可以执行前述方法实施例中相应内容。与现有技术相比,在本发明实施例中,获取车辆当前的定位信息,然后采集车辆当前行驶道路的目标图像,并基于目标图像获取当前行驶道路的第一道路信息,再基于定位信息获取当前行驶道路在预设地图中的第二道路信息,并基于第二道路信息确定出车辆的至少一个初始位姿,接送基于第一道路信息、第二道路信息确定出至少一个初始位姿各自对应的定位结果,进一步基于第一道路信息和预设地图从各个定位结果中确定出目标定位结果。这样,基于视觉感知获取车辆的当前行驶道路的第一道路信息,同时,基于定位信息提供车辆在预设地图中可能所在的至少一个车道,并获取各个车道各自对应的第二道路信息,然后对每个车道基于第一道路信息和各个第二道路信息进行匹配定位,最终得到车辆所在的正确的车道(定位结果)。
[0109]
进一步,即使是在定位信息弱的情况下,本发明实施例仍然可以先确定出多个可能存在误差的初始位姿,然后基于视觉感知和预设地图从多个初始位姿中确定出最终的定位结果,不仅能够在定位信息弱的情况下,保证将车辆定位在正确的车道上,而且由于定位信息弱,导致采样点的数量较少,从而减少了计算量,进而提升了算法效率。
[0110]
应该理解的是,虽然附图的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,其可以以其他的顺序执行。而且,附图的流程图中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,其执行顺序也不必然是依次进行,而是可以与其他步骤或者其他步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0111]
以上所述仅是本发明的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
[0112]
本申请实施例提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行时实现如下情况:获取所述车辆当前的定位信息;采集所述车辆当前行驶道路的目标图像,并基于所述目标图像获取所述当前行驶道路的第一道路信息;基于所述定位信息获取所述当前行驶道路在预设地图中的第二道路信息,并基于所述
第二道路信息确定出所述车辆的至少一个初始位姿;基于所述第一道路信息、所述第二道路信息确定出所述至少一个初始位姿各自对应的定位结果;基于所述第一道路信息和所述预设地图从各个定位结果中确定出目标定位结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1