基于电机方向盘的无前轮传感器自动驾驶系统的制作方法
1.本发明涉及数据处理领域,具体涉及到一种基于电机方向盘的无前轮传感器自动驾驶系统及算法。
背景技术:
2.随着传感器与控制技术的发展和国家对北斗导航定位产业的推广,在精准农业、数字化施工等领域正掀起一场自动驾驶的技术变革,目前基于电机方向盘的自动驾驶系统中,前轮转角的获取方案主要有机械式角度传感器方案和基于车辆运动学模型的单轴陀螺方案两种。
3.机械式角度传感器的使用有如下限制:1.需要根据使用场景定制安装支架;2.使用之前需要进行零位标定,标定的质量直接影响角度测量的绝对精度;3.因为机械式角度传感器是接触式机械结构,使用过程中不可避免产生磨损,需要定期检查、标定和更换;4.一般情况下,机械式角度传感器只能提供角度输出,而不能提供角速度输出。5.使用和维护成本较高,可靠性较低。
4.基于车辆运动学模型的单轴陀螺方案包括主单轴陀螺、子单轴陀螺、gnss接收机和cpu处理器,主单轴陀螺用于测量车辆主体的转动角速度,子单轴陀螺用于测量前轮支承位置的角速度大小,所述gnss接收机用于实时获取车辆的前进速度,cpu处理用于主单轴陀螺、子单轴陀螺观测角速度和gnss速度的获取与同步,以及用于车辆前轮转动角度估算。该方案对两个陀螺的安装位置,两个陀螺的性能,噪声水平等有较高要求,实际使用过程中前轮的震动噪声很大,估算的前轮角度噪声较大,并且需要安装和走线,实际应用中也存在可靠性问题。
技术实现要素:
5.有鉴于此,
6.本发明提供了一种基于电机方向盘的无前轮传感器自动驾驶系统,包括以下步骤:
7.步骤(1):完成gnss接收机初始化,将gnss接收机输出的速度、位置和角度信息和pps信号传入cpu处理器;
8.步骤(2):完成车载imu模块初始化姿态对准;
9.步骤(3):根据gnss接收机的pps信号和cpu处理器的时钟对gnss速度信息和车载imu模块的角速度信息进行时间同步;
10.步骤(4):根据gnss模块的航向角、车载imu模块的航向角速度,利用卡尔曼滤波算法估算出车身的航向角和航向角速度,利用航向角速度计算前轮角度;
11.步骤(5):根据当前车辆的位置,速度,航向,姿态信息,解算出车辆偏离期望路径的航向角偏差和横向偏差,生成自动驾驶的期望控制指令;
12.步骤(6):判断gnss是否更新,若未更新,则电机的控制指令不变,电机锁定在原有
角度位置;若更新,根据电机方向盘的角度信息,角速度信息,估算出的前轮角度,自动驾驶的期望控制指令,合成出电机的控制指令。
13.本发明具有以下有益效果:1、本发明采用了无前轮传感器技术方案,降低了成本,避免了定制支架、零位标定、定期校准等工作,易于安装和维护,提高了系统的可靠性;2、本发明采用了基于卡尔曼滤波器的数据融合技术,对gnss的航向角和imu的航向角速度进行融合处理,从而提高了车身航向角和航向角速度的精度,确保了前轮转角的估计精度和期望指令合成的精度;3、本发明充分利用高精度直流无刷力矩的角度信息和角速度信息,结合前轮转角的估算结果,自动驾驶的期望控制指令,获取了电机的有效控制量。
附图说明
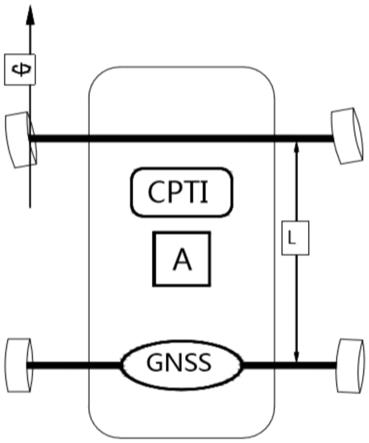
14.图1是本发明中车辆前轮转角跟踪方案设计图;图2是本发明中车辆前轮转角跟踪算法原理图;图3是本发明中车辆自动驾驶算法实现流程图。
15.在下面的说明书中,参考了形成其一部分的附图,并且附图中以阐述其中实践本公开的特定示例性实施例的方式示出。足够详细地描述这些实施例,以使本领域技术人员能够实践本文所公开的概念,并且应当理解可以进行对于各种所公开的实施例的修改,并且可以采用其它实施例,而不背离本公开的范围。因此,下面的详细说明不认为是限制性含义。
具体实施方式
16.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
17.为了彻底理解本发明,将在下列的描述中提出详细的步骤以及详细的结构,以便阐释本发明的技术方案。本发明的较佳实施例详细描述如下,然而除了这些详细描述外,本发明还可以具有其他实施方式。
18.在本发明中,利用卡尔曼滤波对双天线输出的航向角和imu的航向角速度进行修正,获取准确的航向角和航向角速度信息,根据车辆运动学模型估算前轮转角的绝对值;根据当前车辆的位置,速度,航向,姿态信息,解算出车辆偏离期望路径的航向角偏差和横向偏差,生成自动驾驶的期望控制指令;结合无刷电机的角度信息和角速度信息,合成电机的控制量。
19.卡尔曼滤波是由r.e.kalman提出的一种滤波算法,是一种递推线性最小方差估计,它用“状态”表征系统的各个物理量、用“状态方程”和“量测方程”来描述系统的动力学模型。由于车身陀螺存在系统误差和随机噪声,根据车辆运动学模型计算的前轮转角噪声大,频率低,且低速情况下其值不可信,所以本发明采用卡尔曼滤波信息融合技术把gnss的航向角和车辆运动学模型数据,电机的角速度信息进行综合,使其性能互补、取长补短。
20.参照图1
‑
图3所示,本发明提供了一种基于电机方向盘的无前轮传感器的自动驾驶系统,包含车载imu、双天线gnss接收机和cpu处理器等。其中车载imu(a)安装于车辆中心位置,主要用来测量车辆主体的转动角速度,利用此角速度与双天线gnss的航向角进行卡
尔曼滤波获取更为准确的车辆航向角速度和航向角,利用此航向角速度结合车辆运动学模型计算前轮转动角度;gnss接收机实时获取车辆的位置,速度,航向,姿态信息,cpu解算出车辆偏离期望路径的航向角偏差和横向偏差,生成自动驾驶的期望控制指令;;cpu利用估算出来的前轮转角,结合电机的角度信息和角速度信息,合成电机的控制量,从而实现自动驾驶。
21.在本发明中,参照图1所示,a:安装于载体质心的imu模块;gnss:gnss接收机,用于测量运载体的运动速度;ψ:前轮转角;l:车辆轴距,事先量取或从车辆结构设计中获取;cpu:cp处理器,主要实现车辆航向角和航向角速度的卡尔曼滤波算法,期望指令的计算,电机控制量的合成等。
22.参照图2和图3所示,一种车辆前轮转动跟踪的算法,包括以下步骤:
23.步骤(1):完成gnss接收机初始化,将gnss接收机输出的速度、位置和角度信息和pps信号传入cpu处理器;
24.步骤(2):完成车载imu模块初始化姿态对准;
25.步骤(3):根据gnss接收机的pps信号和cpu处理器的时钟对gnss速度信息和车载imu模块的角速度信息进行时间同步;
26.步骤(4):根据gnss模块的航向角、车载imu模块的航向角速度,利用卡尔曼滤波算法估算出车身的航向角和航向角速度,利用航向角速度计算前轮角度;
27.步骤(5):根据当前车辆的位置,速度,航向,姿态信息,解算出车辆偏离期望路径的航向角偏差和横向偏差,生成自动驾驶的期望控制指令;
28.步骤(6):判断gnss是否更新,若未更新,则电机的控制指令不变,电机锁定在原有角度位置;若更新,根据电机方向盘的角度信息,角速度信息,估算出的前轮角度,自动驾驶的期望控制指令,合成出电机的控制指令。
29.本发明采用卡尔曼滤波信息融合技术把imu数据和双天线数据进行综合,使其性能互补、取长补短,利用车辆运动学模型数据估算出前轮转角,结合电机的角度和角速度,可以实现电机方向盘的稳定控制,实现自动驾驶,可以替代传统的需要安装支架、零位标定和易磨损的机械式角度传感器,可以替代前轮陀螺转角仪方案,为农用机械、工程车辆等轮式运载体的自动驾驶和控制提供更简单便捷的方案;以及避免了定制支架、零位标定、安装走线等工作,易于安装和维护。
30.以上对本发明的较佳实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述揭示的方法和技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例,这并不影响本发明的实质内容。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1