一种智能立体车库倾斜检测装置的制作方法
[0001]
本实用新型涉及立体车库领域,特别涉及一种智能立体车库倾斜检测装置。
背景技术:
[0002]
立体车库是用来最大量存取储放车辆的机械或机械设备系统。针对专业车场管理公司提高停车场容量、提高收益、增加停车费收入的有效工具。梳齿式智能立体车库,属于升降横移车库的一种,但比传统升降横移车库更能快速的完成存取车动作,成本低,维修费用低。现有的梳齿式智能立体车库已广泛使用,梳齿式智能立体车库涉及到车辆交换问题,在交换过程中如果升降轿厢或者载车板(停车梳齿)发生倾斜就很容易导致车辆损坏、车辆掉落等危险,传统测量升降轿厢是否倾斜的方法有两种,一是采用类似编码器、激光测距等方法测量4个吊点的运行情况再进行判断,这样的问题是成本高昂,且因为是间接判断存在一定延迟性,降低了判断的及时性,且通常都是判断升降轿厢,而横移台板的倾斜角度并不在判断之列;二是采用陀螺仪等直接测量被测物的倾角,但这样是需要每个被测物体都要加装,而且由无源器件变成有源器件,成本高昂。
技术实现要素:
[0003]
为了解决上述问题,本实用新型的目的在于提供一种智能立体车库倾斜检测装置,通过图像识别方法,结合特制的检验模块快速、及时的判断升降桥箱和横移台板是否发生倾斜,如果发生倾斜,及时停止升降桥箱和横移台板的运行,减少事故的发生。
[0004]
为达到上述目的,本实用新型所采用的技术方案是:
[0005]
一种智能立体车库倾斜检测装置,包括升降井、若干层停车平台、升降桥箱、若干横移台板和控制器;升降井高度方向竖直设置,每一停车平台均水平设置,升降井连通每一停车平台,升降桥箱为梳齿式升降桥箱,升降桥箱水平设置,升降桥箱滑动连接在升降井内,升降桥箱在其动力装置的作用下可在升降井中部沿竖直方向上下运动;每一停车平台内均滑动连接有一横移台板,每一横移台板均为梳齿式横移台板且水平设置,每一横移台板在其各自的动力装置的作用下,均可在其各自对应的停车平台所在的高度空间内水平移动;任一横移台板位于升降井水平截面的中部时,横移台板的长度方向与升降桥箱的长度方向平行,升降桥箱可自由穿过该横移台板,控制器分别与升降桥箱的动力装置、横移台板的动力装置控制连接;
[0006]
还包括图像传感器、若干倾斜检测光栅板和距离判断装置;图像传感器设置在升降桥箱和横移台板运动交接处上方的升降井上,图像传感器的镜头竖直朝下;若干倾斜检测光栅板分别安装在升降桥箱的停车梳齿上端远离中心的位置上和横移台板的停车梳齿上端远离中心的位置上,倾斜检测光栅板包括横向光栅板和竖向光栅板,横向光栅板和竖向光栅板位于同一平面,横向光栅板的光栅长度方向与其所在升降桥箱或横移台板的长度方向垂直,竖向光栅板的光栅长度方向与其所在升降桥箱或横移台板的长度方向平行,若干倾斜检测光栅板在正对图像传感器拍摄方向时所显现的颜色和偏离图像传感器拍摄方
向时所显现的颜色不同;升降桥箱上设置有判断升降桥箱与横移台板距离的距离判断装置;控制器还分别与图像传感器、距离判断装置连接;
[0007]
优选地,横向光栅板在正对图像传感器拍摄方向显现红色、偏离图像传感器拍摄方向显现绿色,竖向光栅板在正对图像传感器拍摄方向显现白色、偏离图像传感器拍摄方向显现蓝色,升降桥箱和横移台板均为黄色。
[0008]
优选地,图像传感器为高清ccd传感器或其他具有颜色辨别能力的光电感知原件。
[0009]
优选地,图像传感器距离升降桥箱和横移台板的运动交接处至少10m,任一倾斜检测光栅板的长度和宽度均小于0.1m。
[0010]
优选地,升降桥箱的停车架和横移台板的停车架上均设置有倾斜检测光栅板。
[0011]
优选地,安装在升降桥箱上的任一倾斜检测光栅板均与升降桥箱的上端面平行设置,安装在横移台板上的任一倾斜检测光栅板均与横移台板的上端面平行设置,每一倾斜检测光栅板的正上方均对应安装有一图像传感器,图像传感器的拍摄方向与倾斜检测光栅板一一垂直对应。
[0012]
综上,由于采用了上述技术方案,本实用新型的有益效果是:
[0013]
本实用新型采用图像传感器结合倾斜检测光栅板,能够判断车辆交换过程中升降桥箱和横移台板是否发生倾斜,这样做的好处是成本低廉易推广,增加成本较低的倾斜检测光栅板即可增检测区域,实现多区域检测,比如,在升降桥箱的停车架和横移台板的停车架上均设置倾斜检测光栅板,即可判断升降桥箱的停车架和横移台板的停车架是否发生局部倾斜变形,从而提高设备的安全性。而且本实用新型采用图像传感器远程非接触无源测量,安装调试都非常容易,结构简单可靠性高,检测准确度满足要求;本实用新型通过图像传感器采集倾斜检测光栅板的颜色,可以直接返回指令,前端集成判断计算,延迟短,响应速度快;本实用新型不仅可以在升降桥箱的整个运行过程中对其进行倾斜检测,还可以通过倾斜检测光栅板颜色的变化,判断每一倾斜检测光栅板所在处的倾斜方向。
附图说明
[0014]
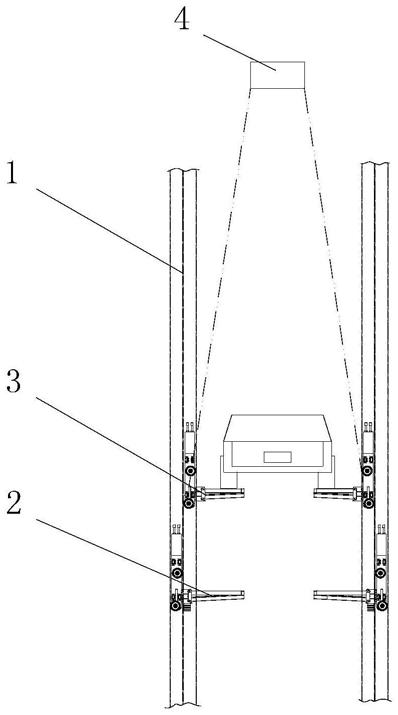
图1是本实用新型实施例所提供的一种智能立体车库倾斜检测装置第一种实施例的示意图。
[0015]
图2是本实用新型实施例所提供的一种智能立体车库倾斜检测装置第一种实施例的升降桥箱的示意图。
[0016]
图3是本实用新型实施例所提供的一种智能立体车库倾斜检测装置第一种实施例的横移台板的示意图。
[0017]
图4是本实用新型实施例所提供的一种智能立体车库倾斜检测装置第一种实施例的倾斜检测光栅板的示意图。
[0018]
图5是本实用新型实施例所提供的一种智能立体车库倾斜检测装置第一种实施例控制关系的示意图。
[0019]
图6是本实用新型实施例所提供的一种智能立体车库倾斜检测装置第二种实施例的示意图。
[0020]
其中:1-升降井,2-升降桥箱,21-停车梳齿,22-距离判断装置,23-停车架,3-横移台板, 4-图像传感器,5-倾斜检测光栅板,51-横向光栅板,52-竖向光栅板。
具体实施方式
[0021]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制,为了更好地说明本实用新型的具体实施方式,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸,对本领域技术人员来说,附图中某些公知结构、部件及其说明可能省略是可以理解的,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0022]
请参阅图1-图5,在本实用新型的一种较佳实施方式中,一种智能立体车库倾斜检测装置,包括升降井1、若干层停车平台、升降桥箱2、若干横移台板3和控制器;升降井1高度方向竖直设置,每一停车平台均水平设置,升降井1连通每一停车平台,升降桥箱2为梳齿式升降桥箱,升降桥箱2水平设置,升降桥箱2滑动连接在升降井1内,升降桥箱2在其动力装置的作用下可在升降井1中部沿竖直方向上下运动;每一停车平台内均滑动连接有一横移台板3,每一横移台板3均为梳齿式横移台板且水平设置,每一横移台板3在其各自的动力装置的作用下,均可在其各自对应的停车平台所在的高度空间内水平移动;任一横移台板 3位于升降井1水平截面的中部时,横移台板3的长度方向与升降桥箱2的长度方向平行,升降桥箱2自由有穿过该横移台板3,控制器分别与升降桥箱2的动力装置、横移台板3的动力装置控制连接;控制器控制升降桥箱2托举车辆到达预定高度,控制器再控制一横移台板3运行到升降桥箱2正下方,升降桥箱2下行穿过该横移台板3,横移台板3上的停车梳齿21替换升降桥箱2上停车梳齿21作为车辆的支撑点,车辆落在横移台板3上,车辆交换完成;
[0023]
还包括图像传感器4、若干倾斜检测光栅板5和距离判断装置22;图像传感器4设置在升降桥箱2和横移台板3运动交接处上方的升降井1上,图像传感器4的镜头竖直朝下;若干倾斜检测光栅板5分别安装在升降桥箱2的停车梳齿21上端远离中心的位置上和横移台板 3的停车梳齿21上端远离中心的位置上,远离停车梳齿21上端中心的位置安装,是为了减少倾斜检测光栅板5被车辆遮挡的可能,倾斜检测光栅板5包括横向光栅板51和竖向光栅板 52,横向光栅板51和竖向光栅板52位于同一平面,横向光栅板51的光栅长度方向与其所在升降桥箱2或横移台板3的长度方向垂直,竖向光栅板52的光栅长度方向与其所在升降桥箱 2或横移台板3的长度方向平行,若干倾斜检测光栅板5在正对图像传感器4拍摄方向时所显现的颜色和偏离图像传感器4拍摄方向时所显现的颜色不同;升降桥箱2上设置有判断升降桥箱2与横移台板3距离的距离判断装置22;控制器还分别与图像传感器4、距离判断装置22连接;当任一横移台板3运动至升降桥箱2正下方时,距离判断装置22开始监测升降桥箱2和横移台板3的实时距离,并将数据实时传给控制器,当控制器根据所接收的数据判定升降桥箱2和横移台板3的距离落在[0,10]cm的范围内时,控制器实时读取图像传感器4 传入的每一倾斜检测光栅板5所显示的颜色,如果任一倾斜检测光栅板5所显示的颜色与设定的颜色不符,控制器判断升降桥箱2或横移台板3发生倾斜,并控制升降桥箱2的运动系统和横移台板3的运动系统均停止运动,如果所有倾斜检测光栅板5所显示的颜色与设定的颜色均相符,升降桥箱2和横移台板3运动直至完成车辆交换。
[0024]
在本实施例中,图像传感器4可以是ccd传感器、cmos传感器或其他具有颜色辨别能力的光电感知原件,优选高清ccd传感器,高清ccd传感器能提供很好的图像质量、抗噪能
力和设计时的灵活性,图像传感器4只需设置一个,安装在升降井1内侧顶部;在升降井 1所允许的范围内,图像传感器4距离升降桥箱2和横移台板3的运动交接处的距离应尽可能远,至少为10m,任一倾斜检测光栅板5的长度和宽度均小于0.1m,但不应小于20mm,倾斜检测光栅板5的面积过小不利于图像传感器4对倾斜检测光栅板5颜色变化的识别,此时,图像传感器4的拍摄方向与同一横向光栅板51的每一光栅之间夹角的差值极小,可以认为图像传感器4的拍摄方向与同一横向光栅板51的每一光栅夹角相等,即同一横向光栅板 51的每一光栅朝向图像传感器4所显示的颜色一致,同理,同一竖向光栅板52的每一光栅朝向图像传感器4所显示的颜色一致;由光栅板的显色原理可知,拍摄方向与光栅长度方向上的夹角改变但拍摄方向与光栅长度方向垂直的方向上的夹角不变,光栅板所显示的颜色不变,拍摄方向与光栅长度方向垂直的方向上的夹角改变时,光栅板所显示的颜色随之改变。
[0025]
在车辆交换瞬间,升降桥箱2和横移台板3所受的力突然剧烈变化,才会导致升降桥箱 2和横移台板3发生倾斜,因此,在本实施例中,只有当升降桥箱2和横移台板3的距离落在[0,10]cm的范围内时,控制器才通过图像传感器4判断倾斜检测光栅板5的颜色是否与设定的颜色一致,在此过程中,横移台板3保持不动,升降桥箱2的运动距离为20cm,20cm 的距离差值对于10m的高度而言非常小,该距离变化对图像传感器4的拍摄方向与任一光栅的夹角变化影响微乎其微,在升降桥箱2和横移台板3未发生倾斜的情况下,图像传感器4 所接收的倾斜检测光栅板5的颜色不会因升降桥箱2的活动而改变;本实施例的倾斜检测光栅板5由横向光栅板51和竖向光栅板52组成,横向光栅板51的光栅长度方向与竖向光栅板 52的光栅长度方向垂直,因此,只要任一光栅板在图像传感器4的拍摄方向的上颜色发生改变,即可判断升降桥箱2或横移台板3发生倾斜,控制器控制升降桥箱2的运动系统和横移台板3的运动系统均停止运动,减少事故的发生;本实施例采用图像传感器4结合倾斜检测光栅板5判断车辆交换过程中升降桥箱2和横移台板3是否发生倾斜,这样做的好处是成本低廉易推广,增加成本较低的倾斜检测光栅板5即可增检测区域,实现多区域检测,以提高设备的安全性。而且本实施例采用图像传感器4远程非接触无源测量,安装调试都非常容易,结构简单可靠性高,检测准确度满足要求;本实施例通过图像传感器4采集倾斜检测光栅板 5的颜色,可以直接返回指令,前端集成判断计算,延迟短,响应速度快。
[0026]
优选地,横向光栅板51在正对图像传感器4拍摄方向显现红色、偏离图像传感器4拍摄方向显现绿色,竖向光栅板52在正对图像传感器4拍摄方向显现白色、偏离图像传感器4拍摄方向显现蓝色,升降桥箱2和横移台板3均为黄色;红色、绿色、白色、蓝色和黄色之间的色差大,使得控制器容易判断倾斜检测光栅板5是否发生颜色变化,同时也能减少升降桥箱2和横移台板3自身颜色对控制器的干扰。
[0027]
优选地,升降桥箱2的停车架23和横移台板3的停车架23上均设置有倾斜检测光栅板 5;升降桥箱2的停车架23是升降桥箱2上受力最集中的地方,也是升降桥箱2上最容易发生局部倾斜变形的部位,横移台板3的停车架23是横移台板3上受力最集中的地方,也是横移台板3上最容易发生局部倾斜变形的部位,有些情况是:升降桥箱2整体未发生倾斜,但升降桥箱2的停车架23却已受力扭转变形,或是横移台板3整体未发生倾斜,但升降桥箱2 的停车架23却已受力扭转变形,从而导致车辆交换不能顺利完成,引起事故发生,因此,在升降桥箱2的停车架23和横移台板3的停车架23上均设置有倾斜检测光栅板5,以判断升降桥箱2的停车架23和横移台板3的停车架23是否发生局部倾斜变形很有必要。
[0028]
请参阅图6,在以上实施例的基础上,在第二种实施例中,安装在升降桥箱2上的任一倾斜检测光栅板5均与升降桥箱2的上端面平行设置,安装在横移台板3上的任一倾斜检测光栅板5均与横移台板3的上端面平行设置,每一倾斜检测光栅板5的正上方均对应安装有一图像传感器4,图像传感器4的拍摄方向与倾斜检测光栅板5一一垂直对应。
[0029]
在本实施例中,图像传感器4的高度大于升降桥箱2的最大运行高度即可,无需特意架设较高的升降井1。在升降桥箱2不发生倾斜的前提下,图像传感器4的拍摄方向与倾斜检测光栅板5一一垂直对应,每两者间的夹角始终不会发生改变,由此,本实施例不仅可以在升降桥箱2的整个运行过程中对其进行倾斜检测,还可以通过倾斜检测光栅板5颜色的变化,判断每一倾斜检测光栅板5所在处的倾斜方向,具体为:
[0030]
(1)预先设定横向光栅板51在正对图像传感器4拍摄方向显现r色、偏离图像传感器 4拍摄方向显现g色,竖向光栅板52在正对图像传感器4拍摄方向显现w色、偏离图像传感器4拍摄方向显现b色;
[0031]
(2)图像传感器4拍摄倾斜检测光栅板5,并将拍摄的图像传给控制器;
[0032]
(3)控制器识别所获得的图像颜色,并根据所识别的图像颜色和步骤(1)中预先设定的颜色进行对比;
[0033]
(4)当控制器识别出同一倾斜检测光栅板5的横向光栅板51显现r色、竖向光栅板52 显现w色,控制器判别该倾斜检测光栅板5所在位置未发生倾斜;
[0034]
当控制器识别出同一倾斜检测光栅板5的横向光栅板51显现r色,竖向光栅板52显现 p色,控制器判别该倾斜检测光栅板5所在位置沿其所在升降桥箱2宽度方向倾斜、沿其所在升降桥箱2长度方向未发生倾斜;
[0035]
当控制器识别出横向光栅板51显现g色,同一倾斜检测光栅板5的竖向光栅板52显现 w色,该倾斜检测光栅板5所在位置沿其所在升降桥箱2长度方向倾斜、沿其所在升降桥箱 2宽度方向未发生倾斜;
[0036]
当控制器识别出横向光栅板51显现g色,同一倾斜检测光栅板5的竖向光栅板52显现 b色,控制器判别该倾斜检测光栅板5所在位置沿其所在升降桥箱2长度方向及宽度方向同时发生倾斜。
[0037]
上述说明是针对本实用新型较佳可行实施例的详细说明,但实施例并非用以限定本实用新型的专利申请范围,凡本实用新型所提示的技术精神下所完成的同等变化或修饰变更,均应属于本实用新型所涵盖专利范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1