一种三坐标测量机接触式探头的制作方法
1.本实用新型涉及三坐标测量机领域,更具体地说,本实用新型涉及一种三坐标测量机接触式探头。
背景技术:
2.近年来,微电子机械系统(mems)技术得到了快速发展,各类微型器件接踵问世,例如:微型涡轮、微型针阵列、压电马达、微型透镜、liga产品和燃油喷油嘴等,这些器件的几何特征尺寸介于数微米到数毫米之间。
3.要保证mems器件的加工质量,就要有相应的高精度检测方式与技术,而现有的非接触式探头不能测量或者测不准具有斜面、台阶、深孔、倒角、圆弧、透明体等特征的工件,所以,需要一种可用于mems器件三维特征尺寸测量的纳米三坐标测量机及测量探头。
4.在所述背景技术部分公开的上述信息仅用于加强对本公开的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
5.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种三坐标测量机接触式探头,本实用新型所要解决的技术问题是:如何测量现有非接触式探头所不能测量或者测不准的具有斜面、台阶、深孔、倒角、圆弧、透明体等特征的工件。
6.为实现上述目的,本实用新型提供如下技术方案:一种三坐标测量机接触式探头,包括探头外壳,所述探头外壳底部设有测量机构和测球,且测球位于测量机构底部,所述测量机构包括连接杆、连接片和传感器靶片,所述传感器靶片活动连接于连接杆与连接片之间,所述连接杆与测球之间固定连接,所述连接片远离传感器靶片的一端固定设有固定片,且固定片与探头外壳底部固定连接,所述传感器靶片顶部固定设有电容传感器。
7.使用时,采用八组连接片组成的悬浮机构,当给处于悬臂状态的连接片末端施加垂直方向的作用力时,连接片会产生一定弯曲,从根本上扩大了悬浮机构的弹性范围,并且八组连接片主要工作在弯曲状态,扭转的因素很少,因此测力较小,铍青铜具有高的强度、弹性、硬度、耐磨性和耐疲劳性,采用连接片作为弹性元件时,其变形工作范围远小于自身的最大允许变形范围,因此连接片形成的弹性机构表现出了很好的重复性和稳定性,整体采用八点电容感应结构的触发测量原理,当测杆和工件接触后发生偏摆,使连接片和电容传感器之间原来的垂直距离发生改变,导致电容传感器的输出发生变化,以此来判断测端是否和工件发生接触。
8.在一个优选地实施方式中,所述测量机构以测球为中心环绕设置八组,且测球通过测量机构悬浮设置。
9.在一个优选地实施方式中,所述连接杆的材质为碳化钨,且八组连接杆呈米字形设置。
10.在一个优选地实施方式中,所述连接片的材质为铍氰铜,且连接片为弹性元件。
11.在一个优选地实施方式中,所述测球底部带有测杆,且测杆的材质为不锈钢。
12.在一个优选地实施方式中,所述电容传感器对应传感器靶片设置八组,且电容传感器的精度为3nm。
13.本实用新型的技术效果和优点:
14.通过设置测量机构,采用八组连接片组成的悬浮机构,当给处于悬臂状态的连接片末端施加垂直方向的作用力时,连接片会产生一定弯曲,从根本上扩大了悬浮机构的弹性范围,并且八组连接片主要工作在弯曲状态,扭转的因素很少,因此测力较小,铍青铜具有高的强度、弹性、硬度、耐磨性和耐疲劳性,采用连接片作为弹性元件时,其变形工作范围远小于自身的最大允许变形范围,因此连接片形成的弹性机构表现出了很好的重复性和稳定性,可使三坐标测量机的测量分辨率达3nm,量程达20μm,提高了三坐标测量机的精度,可用来测量非接触式探头所不能测量或者测不准的具有斜面、台阶、深孔、倒角、圆弧、透明体等特征的工件。
附图说明
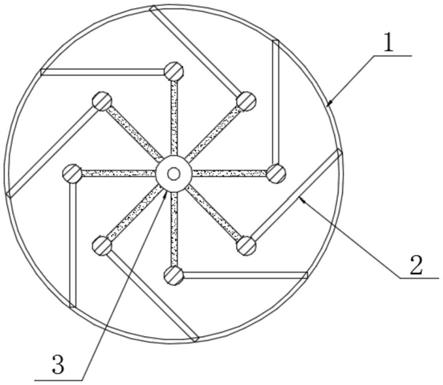
15.图1为本实用新型的整体结构仰视示意图。
16.图2为本实用新型的测量机构结构示意图。
17.图3为本实用新型的探头外壳侧剖结构示意图。
18.附图标记为:1探头外壳、2测量机构、21连接杆、22连接片、23传感器靶片、24固定片、3测球、4电容传感器。
具体实施方式
19.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些示例实施方式使得本公开的描述将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。附图仅为本公开的示意性图解,并非一定是按比例绘制。图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。
20.此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多示例实施方式中。在下面的描述中,提供许多具体细节从而给出对本公开的示例实施方式的充分理解。然而,本领域技术人员将意识到,可以实践本公开的技术方案而省略所述特定细节中的一个或更多,或者可以采用其它的方法、组元、步骤等。在其它情况下,不详细示出或描述公知结构、方法、实现或者操作以避免喧宾夺主而使得本公开的各方面变得模糊。
21.本实用新型提供了一种三坐标测量机接触式探头,包括探头外壳1,所述探头外壳1底部设有测量机构2和测球3,且测球3位于测量机构2底部,所述测量机构2包括连接杆21、连接片22和传感器靶片23,所述传感器靶片23活动连接于连接杆21与连接片22之间,所述连接杆21与测球3之间固定连接,所述连接片22远离传感器靶片23的一端固定设有固定片24,且固定片24与探头外壳1底部固定连接,所述传感器靶片23顶部固定设有电容传感器4。
22.所述测量机构2以测球3为中心环绕设置八组,且测球3通过测量机构2悬浮设置。
23.所述连接杆21的材质为碳化钨,且八组连接杆21呈米字形设置。
24.所述连接片22的材质为铍氰铜,且连接片22为弹性元件。
25.所述测球3底部带有测杆,且测杆的材质为不锈钢。
26.所述电容传感器4对应传感器靶片23设置八组,且电容传感器4的精度为3nm。
27.如图1
‑
3所示,实施方式具体为:装有测杆的测球3通过八组连接杆21与连接片22连接,连接片22通过固定片24与探头外壳1连接,在连接杆21与连接片22连接处传感器靶片23的上方装有高精度电容传感器4,电容传感器4对应传感器靶片23设置八组,采用八组连接片22组成的悬浮机构,当给处于悬臂状态的连接片22末端施加垂直方向的作用力时,连接片22会产生一定弯曲,从根本上扩大了悬浮机构的弹性范围,并且八组连接片22主要工作在弯曲状态,扭转的因素很少,因此测力较小,铍青铜具有高的强度、弹性、硬度、耐磨性和耐疲劳性,采用连接片22作为弹性元件时,其变形工作范围远小于自身的最大允许变形范围,因此连接片22形成的弹性机构表现出了很好的重复性和稳定性,整体采用八点电容感应结构的触发测量原理,当测杆和工件接触后发生偏摆,使连接片22和电容传感器4之间原来的垂直距离发生改变,导致电容传感器4的输出发生变化,以此来判断测端是否和工件发生接触,提高了三坐标测量机的精度,可用来测量非接触式探头所不能测量或者测不准的具有斜面、台阶、深孔、倒角、圆弧、透明体等特征的工件。
28.本实用新型工作原理:
29.参照说明书附图1
‑
3,采用八组连接片22组成的悬浮机构,当给处于悬臂状态的连接片22末端施加垂直方向的作用力时,连接片22会产生一定弯曲,从根本上扩大了悬浮机构的弹性范围,并且八组连接片22主要工作在弯曲状态,扭转的因素很少,因此测力较小,铍青铜具有高的强度、弹性、硬度、耐磨性和耐疲劳性,采用连接片22作为弹性元件时,其变形工作范围远小于自身的最大允许变形范围,因此连接片22形成的弹性机构表现出了很好的重复性和稳定性,整体采用八点电容感应结构的触发测量原理,当测杆和工件接触后发生偏摆,使连接片22和电容传感器4之间原来的垂直距离发生改变,导致电容传感器4的输出发生变化,以此来判断测端是否和工件发生接触。
30.最后应说明的几点是:首先,在本申请的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
31.其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
32.最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1