一种双层旋翼桨叶间距测量装置的制作方法
1.本实用新型涉及直升机桨叶间距测量技术领域,具体涉及一种双层旋翼桨叶间距测量装置。
背景技术:
2.前行桨叶概念旋翼系统,是具有上下两层相对逆向旋转的、共轴刚度的无铰旋翼。采用前行桨叶概念旋翼的复合推力高速直升机是目前少有的不依赖机翼能实现大速度前飞的高速构型,该构型的高速直升机具有比较鲜明的技术特点,速度能提高80%左右,更能胜任时间敏感型任务。
3.在高速直升机飞行过程中,共轴的双层旋翼中上下两层旋翼中独立的桨叶相对逆向转动,需要对上下桨叶形成的所有桨叶对之间的桨尖间距进行动态实时测量。然而,目前尚未有专门的测量装置,因此,急需要设计一种用来测量双层旋翼中桨叶的桨尖间距的机载专用装置。
4.需要注意的是,本部分旨在为权利要求书中陈述的本公开的实施方式提供背景或上下文。此处的描述不因为包括在本部分中就承认是现有技术。
技术实现要素:
5.本实用新型实施例提供一种双层旋翼桨叶间距测量装置,以解决现有技术中尚未有专门对高速直升机飞行过程中双层旋翼中桨叶的桨尖间距进行测量的装置的问题。
6.本实用新型实施例提供一种双层旋翼桨叶间距测量装置,包括雷达数据预处理单元、无线数据遥测单元、发射天线和fmcw毫米波雷达单元,所述雷达数据预处理单元分别与所述无线数据遥测单元和多个所述fmcw毫米波雷达单元连接,所述无线数据遥测单元还与所述发射天线连接,多个所述fmcw毫米波雷达单元分别设置在下层旋翼的各桨叶的端部;
7.还包括雷达数据处理单元、无线数据接收单元、接收天线和数据输出接口,所述雷达数据处理单元分别与所述无线数据接收单元和所述数据输出接口连接,所述无线数据接收单元还与所述接收天线连接,所述数据输出接口还与外部的机载监控告警系统连接;
8.所述接收天线接收所述发射天线发送的数据信号。
9.作为本实用新型的优选方式,还包括工作节拍控制单元,所述工作节拍控制单元分别与所述雷达数据预处理单元、所述无线数据遥测单元和多个所述fmcw毫米波雷达单元连接。
10.作为本实用新型的优选方式,所述工作节拍控制单元设置在桨毂外侧。
11.作为本实用新型的优选方式,还包括磁阻传感器和对应的磁性元件,所述磁阻传感器分别与所述雷达数据预处理单元和所述工作节拍控制单元连接;
12.所述磁阻传感器设置在桨毂外侧,所述磁性元件固定设置在机体上,在所述磁阻传感器随桨毂旋转时可与所述磁性元件相对。
13.作为本实用新型的优选方式,还包括供电单元,所述供电单元分别为所述雷达数
据预处理单元、所述无线数据遥测单元、所述fmcw毫米波雷达单元、所述工作节拍控制单元和所述磁阻传感器供电。
14.作为本实用新型的优选方式,所述fmcw毫米波雷达单元包括信号合成器、信号混频器、毫米波发射天线和毫米波接收天线,所述信号合成器分别与所述信号混频器和所述毫米波发射天线连接,所述信号混频器与所述毫米波接收天线连接,所述信号混频器还与所述雷达数据预处理单元连接。
15.作为本实用新型的优选方式,所述数据输出接口包括rs422接口、arinc429接口以及以太网接口。
16.作为本实用新型的优选方式,所述雷达数据预处理单元、所述无线数据遥测单元和所述发射天线设置在桨毂外侧,所述雷达数据处理单元、所述无线数据接收单元、所述接收天线和所述数据输出接口设置在机体内部。
17.本实用新型实施例提供的双层旋翼桨叶间距测量装置,通过在下层旋翼上的各个桨叶的端部分别设置fmcw毫米波雷达单元,该单元能够产生毫米波雷达信号,并接收和处理上层旋翼各个桨叶反射回来的信号,以此来对上下桨叶形成的所有桨叶对之间的桨尖间距进行测量,还可以在机载监控告警系统上进行显示和记录。
18.另外,本实用新型安装牢固可靠、测量准确且体积小,不仅能够实时获取真实可靠、高精度的飞行数据,而且还能确保飞行的安全性。
附图说明
19.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
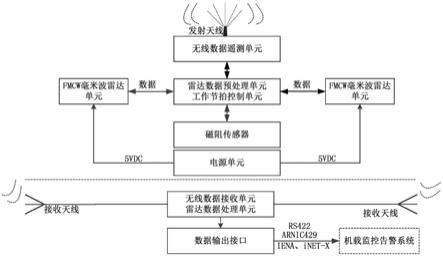
20.图1为本实用新型实施例提供的一种双层旋翼桨叶间距测量装置的结构框图;
21.图2为本实用新型实施例提供的一种双层旋翼桨叶间距测量装置中设置在双层旋翼和桨毂上的各单元的设置示意图;
22.图3为本实用新型实施例提供的一种双层旋翼桨叶间距测量装置中fmcw毫米波雷达单元的结构示意图。
具体实施方式
23.为了使本技术领域的人员更好地理解本实用新型方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
24.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
25.参照图1和图2所示,本实用新型实施例公开了一种双层旋翼桨叶间距测量装置,包括雷达数据预处理单元、无线数据遥测单元、发射天线和fmcw毫米波雷达单元,雷达数据
预处理单元分别与无线数据遥测单元和多个fmcw毫米波雷达单元连接,无线数据遥测单元还与发射天线连接,多个fmcw毫米波雷达单元分别设置在下层旋翼的各桨叶的端部;
26.还包括雷达数据处理单元、无线数据接收单元、接收天线和数据输出接口,雷达数据处理单元分别与无线数据接收单元和数据输出接口连接,无线数据接收单元还与接收天线连接,数据输出接口还与外部的机载监控告警系统连接;
27.接收天线接收发射天线发送的数据信号。
28.本实施例中,本测量装置包括安装在旋转转动部件的动部件和安装在机体内的静部件组成,此处的旋转转动部件指高速直升机的双层旋翼和桨毂。
29.动部件主要包括雷达数据预处理单元、无线数据遥测单元、发射天线和fmcw毫米波雷达单元,雷达数据预处理单元分别与无线数据遥测单元和多个fmcw毫米波雷达单元连接,无线数据遥测单元还与发射天线连接,多个fmcw毫米波雷达单元则分别设置在下层旋翼的各桨叶的端部。
30.具体地,fmcw毫米波雷达单元能够产生毫米波雷达信号并向外辐射出去。当其正上方有上层旋翼中的桨叶经过时,该桨叶会将fmcw毫米波雷达单元辐射出的毫米波雷达信号反射回去,此时fmcw毫米波雷达单元接收反射回来的信号,然后将辐射出的信号和反射回来的信号进行混频后得到差频信号,并对差频信号进行滤波处理、adc转换、fft处理等,最终得到差频信号的频率峰值数据,最后将得到的该数据传输至雷达数据预处理单元中。
31.雷达数据预处理单元控制安装在下层旋翼各个桨叶上的fmcw毫米波雷达单元协同工作,同时处理各个fmcw毫米波雷达单元传输过来的数据,对这些数据进行预处理,并进行编码、附加crc校验后形成串行码流,最后通过控制无线数据遥测单元将预处理后的数据向外传输。
32.无线数据遥测单元通过发射天线将无线数据遥测单元预处理后的数据向设置在机体内的雷达数据处理单元发送。
33.静部件主要包括雷达数据处理单元、无线数据接收单元、接收天线和数据输出接口,雷达数据处理单元分别与无线数据接收单元和数据输出接口连接,无线数据接收单元还与接收天线连接,数据输出接口还与外部的机载监控告警系统连接。
34.具体地,接收天线接收发射天线发送的数据信号,然后通过无线数据接收单元传输至雷达数据处理单元。
35.雷达数据处理单元接收动端的雷达数据预处理系统发送过来的数据进行处理,得到下层旋翼中各桨叶与上层旋翼中各桨叶之间的桨尖间距,并计算最小桨叶间距和最大桨叶距离等关键信息。此外,雷达数据处理单元还根据预先设定的告警阈值,将处理得到的告警数据转换成符合arinc429、rs422等电气信号接口输出格式,或者输出符合inea、inet
‑
x格式的以太网报文格式,再通过数据输出接口向外输出。
36.数据输出接口将雷达数据处理单元处理并转换后的数据传输至外部的机载监控告警系统中进行显示和告警,该机载监控告警系统为原本设置在机体内的系统。
37.上述实施例中,fmcw为frequency modulated continuous wave的缩写,指调频连续波;fft为fast fourier transform的缩写,指快速傅立叶变换;为cyclic redundancy check的缩写,指循环冗余校验。
38.本实施例中,高速直升机的双层旋翼中各有4个桨叶,因此设置在下层旋翼上各桨
叶端部的fmcw毫米波雷达单元也为4个。当然,本领域技术人员可以根据高速直升机的实际情况,选择对应数量的fmcw毫米波雷达单元进行设置。
39.优选地,进一步参照图3所示,fmcw毫米波雷达单元包括信号合成器、信号混频器、毫米波发射天线和毫米波接收天线,信号合成器分别与信号混频器和毫米波发射天线连接,信号混频器与毫米波接收天线连接,信号混频器还与雷达数据预处理单元连接。
40.具体地,fmcw毫米波雷达单元包括信号合成器、信号混频器、毫米波发射天线和毫米波接收天线,其尺寸极小,满足当前桨叶上预留的安装位置的结构尺寸要求。
41.其中,信号合成器生成调频连续波,该毫米波雷达信号的频率随时间变化呈线性升高,这种类型的信号也称为线性调频脉冲。信号合成器产生的毫米波雷达信号通过毫米波发射天线辐射出去,然后通过毫米波接收天线接收上层旋翼中的桨叶反射回的毫米波雷达信号。信号混频器将发射出的信号和接收到的信号合并到一起,生成一个差频信号,并对差频信号进行滤波处理、adc转换、fft处理等,最终得到差频信号的频率峰值数据,最后将得到的该数据传输至雷达数据预处理单元中。
42.fmcw毫米波雷达单元中,信号合成器产生按锯齿变换的fmcw毫米波雷达信号,并通过毫米波发射天线辐射出去,当收到目标的反射和散射后,发射出来的信号基本上按原路折回,在信号混频器接收目标回波的同时与毫米波发射天线耦合出来的部分发射信号进行混频处理形成差频信号,通过混频处理后的差频信号具有相对较小的带宽,减小前端数据采集的压力,从而对数据下行的处理更加有利。将差频信号进行前端带通滤波处理、放大处理、adc转化后,再经过傅里叶变换fft处理到频域,分析其差频信号的频谱,就很容易得到差频。由于该差频与目标的距离有关,因此就能间接获得目标距离,即上下桨叶形成的所有桨叶对之间的桨尖间距。
43.优选地,数据输出接口包括rs422接口、arinc429接口以及以太网接口。
44.具体地,数据输出接口包括多种电气信号接口,包括rs422接口、arinc429接口以及以太网接口,可以使雷达数据处理单元处理得到的告警数据通过多种接口传输至机载监控告警系统中进行显示和告警。
45.优选地,雷达数据预处理单元、无线数据遥测单元和发射天线设置在桨毂外侧,雷达数据处理单元、无线数据接收单元、接收天线和数据输出接口设置在机体内部。
46.具体地,雷达数据预处理单元、无线数据遥测单元和发射天线固定设置在桨毂外侧可随桨毂旋转,而雷达数据处理单元、无线数据接收单元、接收天线和数据输出接口设置在机体内部。
47.由于高速直升机在高速旋转过程中会产生非常大的离心过载且混杂有高温气流等恶劣工作环境,安装在双层旋翼即桨毂上的设备若处置不当就会直接影响到飞机的操控系统,进而危及飞行安全,因此雷达数据预处理单元、无线数据遥测单元和发射天线等设备体积均较小,且可靠固定在桨毂外侧,从而使其不仅能够实时获取真实可靠、高精度的飞行数据,而且还能确保飞行的安全性。
48.在上述实施例的基础上,还包括工作节拍控制单元,工作节拍控制单元分别与雷达数据预处理单元、无线数据遥测单元和多个fmcw毫米波雷达单元连接。
49.本实施例中,为保证安装在下层旋翼中各桨叶上的fmcw毫米波雷达单元的工作是一致的,进一步设置了工作节拍控制单元,同时使其分别与雷达数据预处理单元、无线数据
遥测单元和多个fmcw毫米波雷达单元连接,主要实现的功能是协调多个fmcw毫米波雷达单元工作在统一的节拍之下。
50.优选地,工作节拍控制单元设置在桨毂外侧。
51.具体地,该工作节拍控制单元也设置在桨毂外侧,同时其体积也较小,可靠固定在桨毂外侧。
52.在实际设置时,将雷达数据预处理单元、无线数据遥测单元和工作节拍控制单元设置在同一个板卡上,可以节省安装空间。
53.在上述实施例的基础上,还包括磁阻传感器和对应的磁性元件,磁阻传感器分别与雷达数据预处理单元和工作节拍控制单元连接;
54.磁阻传感器设置在桨毂外侧,磁性元件固定设置在机体上,在磁阻传感器随桨毂旋转时可与磁性元件相对。
55.本实施例中,为了在测量到上下桨叶形成的所有桨叶对之间的桨尖间距时,还可以得到最小桨尖间距发生的相位信息,进一步设置了磁阻传感器和对应的磁性元件。其中,磁阻传感器可靠设置在桨毂外侧,磁性元件固定设置在机体上,并确保在磁阻传感器随桨毂旋转时可与磁性元件相对。
56.同时,磁阻传感器分别与雷达数据预处理单元和工作节拍控制单元连接。可以保证工作在统一的节拍之下,而雷达数据预处理单元采集磁阻传感器的信号,从而得到当前转速下对应的各桨叶的相位信息,并通过工作节拍控制单元与fmcw毫米波雷达单元反映的距离信息进行关联,进而得到最小桨尖间距发生的相位信息。
57.磁阻传感器和对应的磁性元件通过电磁感应原理来达到相位测量的目的,其中磁阻传感器根据磁路中磁阻变化引起的磁通变化,从而在线圈中产生感应电势,从而测得桨毂的转速。当磁阻传感器转动到与安装在机体上的磁性元件相对时,将输出一个脉冲信号,通过对该脉冲信号进行测周法从而得到当前的转速信息,因磁性元件的位置与机体的相对位置固定,从而可得出当前转速下对应的各桨叶的相位信息。
58.在上述实施例的基础上,还包括供电单元,供电单元分别为雷达数据预处理单元、无线数据遥测单元、fmcw毫米波雷达单元、工作节拍控制单元和磁阻传感器供电。
59.本实施例中,还包括供电单元,其采用快速拆卸的电池模块和可以处理电池模块输出电源的电源管理单元,能够将电池模块输出的电源处理成低噪声的5vdc电源,再通过屏蔽线缆将电源输出到雷达数据预处理单元、无线数据遥测单元、fmcw毫米波雷达单元、工作节拍控制单元和磁阻传感器中。
60.根据实际的布置情况,也可以将供电单元设置在桨毂上。
61.综上所述,本实用新型实施例提供的双层旋翼桨叶间距测量装置,通过在下层旋翼上的各个桨叶的端部分别设置fmcw毫米波雷达单元,该单元能够产生毫米波雷达信号,并接收和处理上层旋翼各个桨叶反射回来的信号,以此来对上下桨叶形成的所有桨叶对之间的桨尖间距进行测量,还可以在机载监控告警系统上进行显示和记录。
62.另外,本实用新型安装牢固可靠、测量准确且体积小,不仅能够实时获取真实可靠、高精度的飞行数据,而且还能确保飞行的安全性。
63.在本实用新型的描述中,需要说明的是,“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时
针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
64.此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多该特征。在本公开实施例的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
65.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
66.在本实用新型的上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
67.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1