弧垂测量系统的制作方法
1.本实用新型涉及架空电线技术领域,尤其是涉及弧垂测量系统。
背景技术:
2.架空电线是电力系统的重要组成部分,保证线路的输送容量和安全运行是架空电线维护的关键问题。对于架空电线的检测包含多项指标,其中有一项尤其重要,那就是电线弧垂。弧垂过小,输电导线的拉应力就大,导线振动现象加剧,安全系数减小,导线强度要求提高。弧垂过大,导线对地或对交跨物安全距离变小,需要加高塔架以确保安全,此时势必增加工程投资。因此在实际电力工程建设、运维、改造工作中,经常需要对导线弧垂进行测量,以确保导线弧垂满足要求,从而保证输电线路安全运行。
3.常规弧垂测量系统测量时首先需要选择合适的测量站点架设测量仪器,然后肉眼瞄准输电导线上的观测点获取测量数据,通过计算获得弧垂值。该方法对观测场地、视线、角度等条件均要求较高,对于地处高山峻岭、沟壑纵横等复杂环境地区的架空输电导线弧垂往往很难进行测量。而且上述方法通常只能获得导线最低点处的概略弧垂。同时由于输电导线受风荷振动导致瞄准难度大,测量精度低。
技术实现要素:
4.基于此,有必要针对上述问题,提供用于降低测量难度、提高测量精确度的弧垂测量系统。
5.一种弧垂测量系统,所述弧垂测量系统包括:悬挂于架空电线的第一弧垂测量仪和第二弧垂测量仪,架设于地面的地面控制站,所述第一弧垂测量仪和所述第二弧垂测量仪分别与所述地面控制站通讯连接;
6.所述地面控制站用于发送控制指令至所述第一弧垂测量仪和所述第二弧垂测量仪;
7.所述第一弧垂测量仪和所述第二弧垂测量仪用于响应所述控制指令以采集在架空电线的采集点的坐标信息及姿态信息,还用于将所述坐标信息及所述姿态信息发送至所述地面控制站;
8.所述地面控制站还用于处理所述坐标信息及所述姿态信息,以得到所述架空电线的弧垂。
9.在其中一个实施例中,所述第一弧垂测量仪在所述架空电线上滑动,所述第二弧垂测量仪悬挂于固定的悬挂点;
10.所述第一弧垂测量仪包括第一数据采集器,和设置于所述第一数据采集器正下方的第一控制通讯仪,所述第二弧垂测量仪包括第二数据采集器,和设置于所述第二数据采集器正下方的第二控制通讯仪,所述第一控制通讯仪和所述第二控制通讯仪分别与所述地面控制站通讯连接;
11.所述第一数据采集器和所述第一控制通讯仪之间设置有滑轮组件,所述滑轮组件
包括上滑轮和下滑轮,所述上滑轮和所述下滑轮之间放置所述架空电线以进行滑动。
12.在其中一个实施例中,所述第一数据采集器包括采集器本体、设置于所述采集器本体内的第一处理器、以及与所述第一处理器连接的通讯接口和定位天线。
13.在其中一个实施例中,所述定位天线平行设置于所述采集器本体的外部,所述定位天线与所述采集器本体通过水平设置的连接件进行固定,所述定位天线用于接收卫星发送的卫星信号;
14.所述通讯接口包括1个雷默航空接口和1个射频接口,用于接收所述地面控制站发送的定位误差数据;
15.所述第一处理器用于处理所述卫星信号及所述定位误差数据,以得到在所述采集点的坐标信息。
16.在其中一个实施例中,所述第一控制通讯仪包括通讯仪本体,设置于所述通讯仪本体内的第二处理器,以及分别与所述第二处理器连接的电台天线接口、数据通讯接口、姿态仪和电池接口。
17.在其中一个实施例中,所述电台天线接口包括第一电台天线接口和第二电台天线接口;
18.所述数据通讯接口包括第一数据通讯接口和第二数据通讯接口;
19.所述姿态仪用于采集在架空电线的采集点的姿态信息;
20.所述第一弧垂测量仪还包括设置于所述第一控制通讯仪下方的电池,所述电池接口包括第一电池接口和第二电池接口,所述第一电池接口和第二电池接口分别与所述电池连接。
21.在其中一个实施例中,所述地面控制站包括建立通讯连接的北斗地面差分站和地面控制显示终端。
22.在其中一个实施例中,所述北斗地面差分站包括设置于三脚支架上的基准站和基准站电台;
23.所述基准站电台设置有雷默航空接口和天线接口。
24.在其中一个实施例中,所述地面控制显示终端包括终端本体,设置于所述终端本体一面的显示屏,及相对设置于所述显示屏的侧面上的天线接口、读写接口、指示灯和开关。
25.在其中一个实施例中,所述天线接口包括2个电台天线接口,2个定位数据天线接口和2个4g天线接口,用于接收所述北斗地面差分站发送的显示内容;
26.所述读写接口包括sim卡接口和u盘接口,用于读取和写入显示内容;
27.所述显示屏用于将所述显示内容进行显示,所述显示内容包括电塔类型、电塔编号、弧垂曲线及弧垂中的至少一种。
28.本实用新型提供了一种弧垂测量系统,由地面控制站进行远程控制,通过第一弧垂测量仪和第二弧垂测量仪对架空电线上的各采集点的坐标信息及姿态信息进行实时采集,考虑了姿态变化对坐标采集的影响,一定程度提高了坐标采集的稳定性。再由地面控制站对回传的坐标信息及姿态信息进行转换、分析、计算以得到架空电线的弧垂,这减少了弧垂测量难度的同时,也提升了弧垂测量精度。
附图说明
29.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
30.其中:
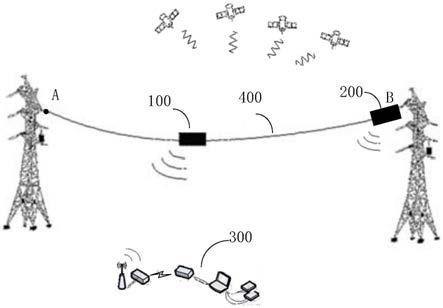
31.图1为一个实施例中弧垂测量系统的工作示意图;
32.图2为一个实施例中第一弧垂测量仪的主视图;
33.图3为一个实施例中第一控制通讯仪的俯视图;
34.图4为一个实施例中北斗地面差分站的示意图;
35.图5为一个实施例中地面控制显示终端的示意图。
具体实施方式
36.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.如图1所示,图1为一个实施例中弧垂测量系统的工作示意图。本弧垂测量系统包括第一弧垂测量仪100、第二弧垂测量仪200以及地面控制站300。如图1 所示,架空电线400架设在相邻两个电塔之间,通过第一挂线点a与其中一个电塔连接,且通过第二挂线点b与另一个电塔连接。在弧垂测量开始的时候,第一弧垂测量仪100悬挂于第一挂线点a,而第二弧垂测量仪200是悬挂于第二挂线点b。在第一弧垂测量仪100采集到第一挂线点a处的坐标信息及姿态信息后,第一弧垂测量仪100通过人为牵引在架空电线400上滑动,而第二弧垂测量仪200 固定悬挂于第二挂线点b。地面控制站300架设在可建立通讯连接的附近地面上,在架设完毕后,同时与第一弧垂测量仪100和第二弧垂测量仪200建立通讯连接。
38.具体的,地面控制站300与第一弧垂测量仪100和第二弧垂测量仪200的完成弧垂测量的过程为,地面控制站300发送控制指令至第一弧垂测量仪100和第二弧垂测量仪200,该控制指令是对第一弧垂测量仪100和第二弧垂测量仪200 相关参数的设定,例如滑动速度、距离等。第一弧垂测量仪100和第二弧垂测量仪200响应该控制指令,采集在架空电线400的预设采集点的坐标信息及姿态信息,然后将坐标信息及姿态信息发送至地面控制站300。其中坐标信息具体包括经纬度坐标以及高程,姿态信息包括横滚角及俯仰角。地面控制站300接收坐标信息及姿态信息后,通过对坐标信息及姿态信息进行姿态校正、二维平面坐标转换、拟合计算等处理以得到架空电线400的弧垂。
39.上述弧垂测量系统,由地面控制站进行远程控制,通过第一弧垂测量仪和第二弧垂测量仪对架空电线上的各采集点的坐标信息及姿态信息进行实时采集,考虑了姿态变化对坐标采集的影响,一定程度提高了坐标采集的稳定性。再由地面控制站对回传的坐标信息及姿态信息进行转换、分析、计算以得到架空电线的弧垂,这减少了弧垂测量难度的同时,也提升了弧垂测量精度。
40.在一个具体实施例中,第一弧垂测量仪100包括第一数据采集器110,和设置于第
一数据采集器110正下方的第一控制通讯仪130。第一数据采集器110用于采集在架空电线400的采集点的坐标信息,第一控制通讯则用于采集在架空电线400的采集点的姿态信息且与地面控制站300建立通讯连接。相应的,第二弧垂测量仪200与第一弧垂测量仪100的结构相同,第二弧垂测量仪200也包括第二数据采集器,和设置于第二数据采集器正下方的第二控制通讯仪。第二数据采集器与第一数据采集器110的用途相同,第二控制通讯仪与第一控制通讯仪130 的用途也相同。
41.具体的,由于本实施例中第一弧垂测量仪100与第二弧垂测量仪200的结构相同,下面就仅对第一弧垂测量仪100的结构进行举例说明。参见图2,图2为一个实施例中第一弧垂测量仪的主视图。如图2所示,第一数据采集器110和第一控制通讯仪130之间设置有滑轮组件120,该滑轮组件120具体包括若干个上滑轮121和下滑轮122,上滑轮121和下滑轮122之间存在一定的空隙,该空隙使得第一弧垂测量仪100可悬挂于架空电线400上,而通过滑轮组件120的滑动使得第一弧垂测量能在架空电线400上持续滑动。
42.第一数据采集器110则具体包括采集器本体111、设置于采集器本体111内的第一处理器112、以及与第一处理器112连接的定位天线113和通讯接口114。为使得坐标信息尽量避免出现误差以及便于姿态校正,定位天线113平行设置于采集器本体111的外部,而定位天线113与采集器本体111之间是通过一水平设置的连接件115来进行固定连接的。定位天线113主要用途为接收卫星发送的卫星信号。第一数据采集器110的通讯接口114包括1个七芯雷默航空接口和1个 sma(subminiature version a)射频接口,从而实现支持电台、4g及有线数据输入,通讯接口114主要用于接收地面控制站300发送的定位误差数据。第一处理器112则获取卫星信号和定位误差数据,并对卫星信号和定位误差数据通过 gps(global positioning system,全球定位系统)及rtk(real time kinematic,载波相位差分)技术进行处理,以得到在采集点的坐标信息。
43.参见图3,图3为一个实施例中第一控制通讯仪的俯视图。该第一控制通讯仪130包括通讯仪本体131,设置于通讯仪本体131内的第二处理器132,以及分别与第二处理器132连接的姿态仪133、电台天线接口、数据通讯接口和电池接口。具体的,电台天线接口包括第一电台天线接口134和第二电台天线接口135,用于接收地面控制站的电台数据。数据通讯接口包括第一数据通讯接口136和第二数据通讯接口137,用于支持有线数据输入。通过电台天线接口和数据通讯接口可实现坐标信息的获取,及将坐标信息和姿态信息打包发送至地面控制站。姿态仪133则用于采集在架空电线400的采集点的姿态信息。此外,参见图2,第一弧垂测量仪100还包括设置于第一控制通讯仪130下方的电池140,电池接口具体包括第一电池接口138和第二电池接口139,通过第一电池接口138和第二电池接口139与电池140间接连接,从而让电池140为第一控制通讯仪130持续供电。
44.在一个具体实施例中,地面控制站300包括建立通讯连接的北斗地面差分站 310和地面控制显示终端320。具体的,参见图4,图4为一个实施例中北斗地面差分站的示意图。北斗地面差分站310架设在架空电线400附近的地面,包括三脚支架311、基准站312和基准站电台313。如图4所示,三脚支架311起支撑作用,基准站312设置于三脚支架311的顶部,基准站电台313则设置于三脚支架311的任意一个分支脚上。基准站电台313设置有雷默航空接口和天线接口,在连接天线后,可实现接收第一弧垂测量仪100和第二弧垂测量仪200发送的坐标信息和姿态信息。
45.参见图5,图5为一个实施例中地面控制显示终端的示意图。地面控制显示终端320包括终端本体321,设置于终端本体一面的显示屏322,及相对设置于显示屏322的侧面上的天线接口、读写接口、开关328和指示灯329。具体的,天线接口包括2个定位数据天线接口323、2个电台天线接口324和2个4g天线接口325,使地面控制显示终端320支持电台、4g及有线数据输入,主要用于接收北斗地面差分站310发送的显示内容。其中,该显示内容具体包括电塔类型、电塔编号、弧垂曲线及弧垂中的至少一种。显示屏322则对显示内容进行显示。读写接口包括sim卡接口326和u盘接口327,用于读取和保存显示内容。地面控制显示终端320可使得测量人员能直观的观察到弧垂测量的情况。
46.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
47.以上实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1