一种格栅式打光物体表面缺陷检测装置的制作方法
1.本实用新型涉及一种不仅检测效果好,而且检测效率高,同时适用性好的一种格栅式打光物体表面缺陷检测装置,属于检测技术领域。
背景技术:
2.cn 109242828 a、名称“一种基于光栅投影多步相移法的3d打印制品三维缺陷检测方法”, 步骤1),获取待测物体表面点云及点云预处理阶段:根据待测物体的标准cad模型3d打印出待测物体,将待测物体放置在桌面上,投射多幅不同初始相位的标准正弦数字光栅到待测物体表面,通过ccd相机连续拍摄物体表面被投射标准正弦数字光栅后的条纹图像,利用反正切函数对条纹图像进行求解得到相位值,将所求的相位值进行解包裹反求得到待测物体的表面点云,然后进行预处理获得拍摄点云;步骤2),获取标准点云阶段:提取待测物体的标准cad模型的三角形面片的顶点坐标和 法向量,在三角形面片上采样生成所需密度的标准点云;步骤3),粗配准阶段:计算拍摄点云的快速点特征直方图,在标准点云中找到与快速点特征直方图相似的点,进行随机采样一致变换获得粗配准点云;步骤4),精配准阶段:采用迭代最近点方式(icp)对粗配准点云进行处理获得精配准点 云;步骤5),提取缺陷阶段:设置缺陷阈值遍历提取异常点,用异常点进行欧式聚类,计算每个类中所有点的重心坐标作为缺陷的位置,获取待测物体表面的各个缺陷位置和缺陷个数;采用点云生长方法从缺陷的位置生长出缺陷区域点云,对缺陷区域点云进行三维重建。所述的步骤1)中,进行预处理获得拍摄点云,具体是:1 .2)针对待测物体的表面点云,以桌面背景作为基元,预设桌面背景的基元平面形状,采用随机采样方法拟合桌面背景的基元平面形状并进行多次处理获得不同的平面模型,计算平面模型中的点数量,选取点数量最多的平面模型作为最优平面,将最优平面中的点作为无效背景点从待测物体的表面点云中去除;1 .3)对去除无效背景点后的点云进行体素下采样处理,以体素下采样中每个体素单元的所有点的重心代替覆盖体素单元内所有点;1 .4)对体素下采样后的点云进行统计滤波,设置搜寻近邻点数和离群阈值,遍历点云中的所有点,采用以下方式针对每个点进行处理:建立以点为球心、以离群阈值为球半径的球体,球体内的点数量和搜寻近邻点数进行比较:若点数小于搜寻近邻点数,则将该点视为离群噪点,进行去除;若点数大于等于搜寻近邻点数,则将该点不视为离群噪点,进行保留;最终保留得到的为拍摄点云。所述步骤2)中,提取待测物体的标准cad模型的三角形面片的顶点坐标和法向量转化为点云数据,再调用点云库pcl中的点云网格采样库pcl_mesh_sampling,使用可视化工具库vtk(visulization toolkit)读取并在待测物体的标准cad模型均匀采样然后生成点云。所述的步骤3)具体是:3 .1)从拍摄点云p中任意选择s个点作为样本点,同时使得s个样本点任意两个点之间的距离均大于预先设定的最小阈值dmin;3 .2)根据所有样本点的每个点p与其在拍摄点云p中近邻的其他点之间的关系,计算获得快速点特征直方图(fpfh);3 .3)将标准点云中的点和样本点进行随机匹配:3 .3 .1)对于每个样本点,在标准点云找到满足与快速点特征直方图(fpfh)相似的其中一个点作为匹配点,由所有样本点与其各自对应的匹配点构成一组对应点组,
计算一组对应点组中所有样本点与其对应的匹配点之间的刚体变换矩阵,再计算用刚体变换矩阵对拍摄点云进行变换获得的点云结果和标准点云之间的距离差,进而采用以下公式计算获得度量误差:式中,h(li)表示第i组对应点组的度量误差,||li||表示距离差,ml为预设比较阈值,li 为第i组对应点组获得的点云结果和标准点云之间的距离;3 .3 .2)重复上述步骤3 .3 .1)进行多次,获得多组对应点组及其度量误差,再计算度量误差和函数其中n表示对应点组的总组数,i表示对应点组的组序数;取度量误 差和函数最小的对应点组对应的刚体变换矩阵对拍摄点云进行变换作为粗配准点云。所述的步骤4)具体是:采用迭代最近点方式(icp)对粗配准点云进行处理, 使得粗配准点云靠近标准点云并获得旋转矩阵r和平移矩阵t,再采用以下公式将粗配准点云配准到标准点云的坐标系下,获得精配准点云:q=rp+t其中,r表示旋转矩阵,t表示平移矩阵,p表示粗配准点云,q表示精配准点云。所述的步骤5)具体是:5 .1)设置缺陷阈值遍历提取异常点:针对精配准点云中的每个点,从标准点云找到距离最近的点,求取两个点之间的距离并作判断:若距离小于缺陷阈值,则精配准点云中的该 点为正常点;若距离大于等于缺陷阈值,则精配准点云中的该点为异常点; 5 .2)对异常点进行欧式聚类,获得聚类结果,每个类代表一个缺陷,计算每个类中所有点的重心坐标作为缺陷的位置,从而获取待测物体表面的各个缺陷位置和缺陷个数;5 .3)采用点云生长方法从缺陷的位置生长出缺陷区域点云,对缺陷区域点云进行三维重建,完成缺陷检测。其不足之处在于:该种基于光栅投影多步相移法的3d打印制品三维缺陷检测方法检测效率较低,不适合大规模检测。
技术实现要素:
3.设计目的:为避免背景技术中的不足,设计一种不仅检测效果好,而且检测效率高,同时适用性好的一种格栅式打光物体表面缺陷检测装置。
4.设计方案:为实现上述设计目的。
5.1、所述光源产生的光为格栅光且格栅光在直线移动平台的上端面形成格栅照射区域,所述直线移动平台能够带动被检测物体经过格栅照射区域,所述相机的镜头对准格栅照射区域的设计,是本实用新型的技术特征之一。这样设计的目的在于:所述光源产生的光为格栅光且格栅光在直线移动平台的上端面形成格栅照射区域,所述直线移动平台能够带动被检测物体经过格栅照射区域,所述相机的镜头对准格栅照射区域,直线移动平台将带动被检测物体缓慢移动,在被检测物体经过格栅照射区域时,相机对正在经过格栅照射区域的被检测物体进行整体扫描式拍摄,相机拍摄的照片经过计算机处理后能够合成整幅图像,实现被检测物体表面缺陷的检测,带有表面缺陷特征的工件,其缺陷部分会在亮格栅与暗格栅之间呈现动态的图像特征。这样的好处,一是通过格栅式打光方式,缺陷特征呈现更明显,使得缺陷能够更好的被检测出,即本装置检测效果更好;二是通过直线移动平台带动被检测物体进行检测,其检测效率更高,从而提高整个行业对于透明或半透明产品的检测生产效率。
6.2、所述光源的发光面与直线移动平台的上端面之间的夹角为45
°
,所述相机呈45
°
角倾斜向下安装在直线移动平台的上方的设计,是本实用新型的技术特征之二。这样设计的目的在于:所述光源的发光面与直线移动平台的上端面之间的夹角为45
°
,所述相机呈45
°
角倾斜向下安装在直线移动平台的上方,这样能够提高装置的检测效果和质量。
7.3、所述直线移动平台为电动滑台的设计,是本实用新型的技术特征之三。这样设计的目的在于:所述直线移动平台为电动滑台,由于电动滑台能够对移动速度进行高精度的控制,使用者可以根据检测精度要求选择匹配的移动速度,这样使用者可以获得需要拍摄的图片张数,令装置使用更灵活。
8.4、所述两根安装圆杆设置在直线移动平台的两侧,其中一根安装圆杆的上端通过第一夹持件安装有相机,另一根安装圆杆的上端通过第二夹持件安装有光源的设计,是本实用新型的技术特征之四。这样设计的目的在于:由于第一夹持件能够调整相机的纵向位置和横向位置,第二夹持件能够调整光源的高度位置,使得装置能够适应不同尺寸的工件,从而提高了装置的适用性。
9.技术方案:一种格栅式打光物体表面缺陷检测装置,包括直线移动平台、相机和光源,所述相机和光源均位于直线移动平台的上方,所述光源产生的光为格栅光且格栅光在直线移动平台的上端面形成格栅照射区域,所述直线移动平台能够带动被检测物体经过格栅照射区域,所述相机的镜头对准格栅照射区域。
10.本实用新型与背景技术相比,一是本装置通过格栅式打光方式,缺陷特征呈现更明显,使得缺陷能够更好的被检测出,即本装置检测效果更好;二是本装置通过直线移动平台带动被检测物体进行检测,其检测效率更高。
附图说明
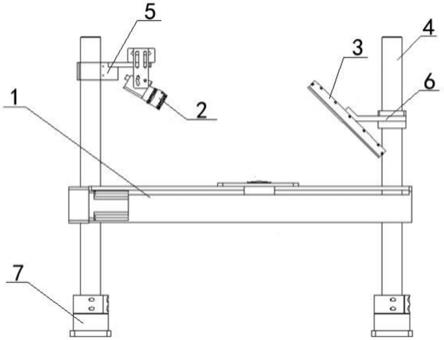
11.图1是一种格栅式打光物体表面缺陷检测装置的正视结构示意图。
12.图2是光源的正视结构示意图。
13.图3是一种格栅式打光物体表面缺陷检测装置的立体结构示意图。
具体实施方式
14.实施例1:参照附图1
‑
图3。一种格栅式打光物体表面缺陷检测装置,包括直线移动平台1、相机2和光源3,所述相机2和光源3均位于直线移动平台1的上方,所述光源3产生的光为格栅光且格栅光在直线移动平台1的上端面形成格栅照射区域,所述直线移动平台1能够带动被检测物体经过格栅照射区域,所述相机2的镜头对准格栅照射区域。直线移动平台1将带动被检测物体(被检测物体即工件,工件的外表面可以是平面或者带弧面,如带弧度的镜片,或者平面的玻璃,液晶显示面板,平面或者弧面的大理石板等,工件的材质可以是玻璃、塑料、金属、大理石等只要表面能够反射光线的材质)缓慢移动,在被检测物体经过格栅照射区域(光源将格栅光照射于被检测物体的表面),相机2对正在经过格栅照射区域的被检测物体进行整体扫描式拍摄(所谓整体扫描式拍摄是指不间断的连续拍摄),相机2能够将拍摄的图片上传给计算机,该计算机中设置有图像处理软件,该软件能够对图像的动态变化进行分析并合成出整幅图像,实现被检测物体表面缺陷的检测,带有表面缺陷特征的工件,其缺陷部分会在亮格栅与暗格栅之间呈现动态的图像特征。
15.所述光源3为格栅式平板灯。所述格栅式平板灯的发光面设有格栅板,所述格栅板上设有呈点阵设置的通光孔。所述相机2斜向设置在直线移动平台1的上方,所述光源3斜向设置在直线移动平台1的上方。所述光源3的发光面与直线移动平台1的上端面之间的夹角为45
°
,所述相机2呈45
°
角倾斜向下安装在直线移动平台1的上方。所述直线移动平台1为电
动滑台。所述电动滑台能够对被检测物体进行高精度的缓慢移动,由于电动滑台能够对移动速度进行高精度的控制,使用者可以根据检测精度要求选择匹配的移动速度,这样使用者可以获得需要拍摄的图片张数,令装置使用更灵活。
16.还包括两根安装圆杆4,所述两根安装圆杆4设置在直线移动平台1的两侧,其中一根安装圆杆4的上端通过第一夹持件5安装有相机2,另一根安装圆杆4的上端通过第二夹持件6安装有光源3。第一夹持件5由底座51、连接板52和相机安装座53构成,所述连接板52的上端面开有条形通孔54,所述底座51的上端面开有圆杆通孔且圆杆通孔贯通底座51的上下两端面,所述底座51的上端面开有螺纹孔且螺纹孔位于圆杆通孔的一侧,连接板52在圆杆通孔与条形通孔54贯通后采用螺钉固定安装在底座51上且连接板52的另一端与相机安装座53的一侧面固定连接(如焊接),所述底座51的侧面开有紧定螺钉孔55且紧定螺钉孔55与圆杆通孔相贯通,在安装圆杆4与底座51的圆杆通孔插接配合后通过紧定螺钉固定实现两者固定连接;这样使用者可以根据需要调整相机2的位置(相机2的纵向位置和横向位置)。所述第二夹持件6包括底座61和光源安装座62,所述底座61的一端与光源安装座62固定连接,所述底座61的上端面开有圆杆通孔且圆杆通孔贯通底座61的上下两端面,所述底座61的侧面开有紧定螺钉孔63且紧定螺钉孔63与圆杆通孔相贯通,在安装圆杆4与底座61的圆杆通孔插接配合后通过紧定螺钉固定实现两者固定连接;这样使用者可以根据需要调整光源3的高度位置。所述两根安装圆杆1的底端设有固定座7;固定座7的设置便于安装圆杆1的固定安装。
17.需要理解到的是:上述实施例虽然对本实用新型的设计思路作了比较详细的文字描述,但是这些文字描述,只是对本实用新型设计思路的简单文字描述,而不是对本实用新型设计思路的限制,任何不超出本实用新型设计思路的组合、增加或修改,均落入本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1