一种标定毫米波雷达的系统及交通工具的制作方法
1.本实用新型实施例涉及毫米波雷达技术领域,尤其涉及一种标定毫米波雷达的系统及交通工具。
背景技术:
2.随着汽车行业的发展以及当今社会对行车安全的要求也越来越高,现在很多车型都提供了智能辅助驾驶adas技术,而大部分智能辅助驾驶技术主要依靠视觉摄像头和毫米波雷达组成1r1v系统来实现。为了保证毫米波雷达安装后的效果能满足使用要求,所以必须对毫米波雷达的安装误差进行标定补偿。
3.而现有的标定毫米波雷达的系统,绝大部分都是通过一个车身摆正定位系统装置和一套标定角反射器来来组建标定场地,然后采用定制的标定上位机来完成标定,即需要专门的标定场地,需要定制开发车身摆正定位系统装置,导致标定环境建设成本高,建设周期较长,同时复用度较低的问题。
技术实现要素:
4.本实用新型实施例主要解决的技术问题是提供一种标定毫米波雷达的系统及交通工具,能快速准确对毫米波雷达的安装误差进行标定补偿,简单方便,且成本低。
5.为了解决上述技术问题,第一方面,本实用新型其中一实施例提供了一种标定毫米波雷达的系统,应用于交通工具,所述系统包括摄像头、毫米波雷达和控制器,所述摄像头、所述毫米波雷达和所述控制器均设置于所述交通工具上,其中,所述控制器分别与所述交通工具、所述摄像头和所述毫米波雷达通信连接;
6.所述摄像头用于在自标定后获取目标物的第一角度位置信息,并将所述第一角度位置信息发送给所述控制器;
7.所述毫米波雷达用于获取所述目标物的第二角度位置信息,并将所述第二角度位置信息发送给所述控制器;
8.所述控制器用于根据所述第一角度位置信息、所述第二角度位置信息和所述交通工具的速度、曲率,确定所述毫米波雷达的安装误差,并将所述安装误差发送给所述毫米波雷达,以使所述毫米波雷达根据所述安装误差进行标定。
9.在一些实施例中,所述控制器集成于所述摄像头中,或,集成于所述毫米波雷达中。
10.在一些实施例中,还包括第一can总线,所述摄像头通过所述第一can总线与所述交通工具通信连接。
11.在一些实施例中,还包括第二can总线,所述毫米雷达波通过所述第二can总线与所述摄像头通信连接。
12.在一些实施例中,还包括供电电源,所述供电电源分别与所述摄像头、所述毫米波雷达和所述控制器连接。
13.在一些实施例中,所述供电电源为所述交通工具中的电源。
14.在一些实施例中,所述摄像头和所述毫米波雷达均安装于所述交通工具的上表面。
15.在一些实施例中,所述摄像头和所述毫米波雷达均处于所述交通工具的纵向对称平面上。
16.为了解决上述技术问题,第二方面,本实用新型其中一实施例提供了一种交通工具,包括如上第一方面所述的标定毫米波雷达的系统。
17.本实用新型实施例的有益效果:区别于现有技术的情况,本实用新型实施例提供的标定毫米波雷达的系统,应用于交通工具,该系统包括摄像头、毫米波雷达和控制器,所述摄像头、所述毫米波雷达和所述控制器均设置于所述交通工具上,其中,所述控制器分别与所述交通工具、所述摄像头和所述毫米波雷达通信连接,所述摄像头用于在自标定后获取目标物的第一角度位置信息,并将所述第一角度位置信息发送给所述控制器,所述毫米波雷达用于获取所述目标物的第二角度位置信息,并将所述第二角度位置信息发送给所述控制器,所述控制器用于根据所述第一角度位置信息、所述第二角度位置信息和所述交通工具的速度、曲率,确定所述毫米波雷达的安装误差,并将所述安装误差发送给所述毫米波雷达,以使所述毫米波雷达根据所述安装误差进行标定。也即,通过自标定后的摄像头作为基准,能快速准确对毫米波雷达的安装误差进行标定补偿,简单方便,且成本低。
附图说明
18.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
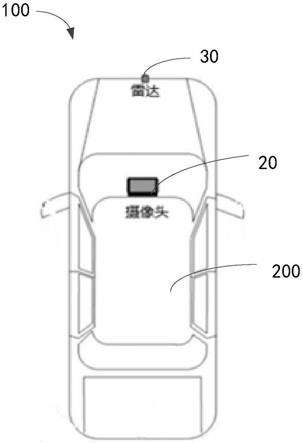
19.图1为本实用新型实施例提供的一种标定毫米波雷达的系统的应用示意图;
20.图2为本实用新型实施例提供的一种标定毫米波雷达的系统的结构示意图。
具体实施方式
21.为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
22.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本说明书中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本实用新型。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
23.请参阅图1,本实用新型其中一实施例提供了一种标定毫米波雷达的系统100,应用于交通工具200,所述标定毫米波雷达的系统100包括摄像头20、毫米波雷达30和控制器(图未示)。所述摄像头20、所述毫米波雷达30和所述控制器均设置于所述交通工具200上,即将所述摄像头20、所述毫米波雷达30和所述控制器均安装于所述交通工具200上,例如,
可以将所述毫米波雷达30安装于所述交通工具200的前保险杠上,将所述摄像头20安装于交通工具200顶部的前边缘处。
24.所述控制器分别与所述交通工具200、所述摄像头20和所述毫米波雷达30通信连接。所述摄像头20用于在自标定后获取目标物的第一角度位置信息,并将所述第一角度位置信息发送给所述控制器。所述毫米波雷达30用于获取所述目标物的第二角度位置信息,并将所述第二角度位置信息发送给所述控制器。从而,所述控制器可以根据所述第一角度位置信息、所述第二角度位置信息和所述交通工具200的速度、曲率,确定所述毫米波雷达30的安装误差,并将所述安装误差发送给所述毫米波雷达30,以使所述毫米波雷达30根据所述安装误差进行标定。在本实施例中,通过自标定后的摄像头20作为基准,能快速准确对毫米波雷达30的安装误差进行标定补偿,简单方便,且成本低。
25.具体的,当交通工具200在路上行驶时,摄像头20可以进行自标定,例如拍摄车道线并根据现有的摄像头20自标定方法进行自标定,即确定摄像头20的几何参数、光学参数以及摄像头20相对于世界坐标系的方位。可以理解的是,所述摄像头20自标定方法可以为基于主动视觉的自标定法、基于kruppa方程的自标定方法、分层逐步标定法或基于二次曲面的自标定方法。
26.当所述摄像头20完成自标定后,通过拍摄目标物并对目标物的成像进行分析,可以获取所述目标物的第一角度位置信息。可以理解的是,所述第一角度位置信息为摄像头20确定的目标物相对于交通工具200的角度位置信息,例如,目标物为所述交通工具正前方车道上的车辆,第一角度位置信息即为摄像头20检测到的上述车辆与交通工具200的夹角。同时,毫米波雷达30对所述目标物进行检测,可以获取所述目标物的第二角度位置信息。可以理解的是,所述第二角度位置信息为所述毫米波雷达30确定的目标物相对于交通工具200的角度位置信息,例如,目标物为上述车辆,第二角度位置信息即为毫米波雷达30检测到的上述车辆与交通工具200的夹角。
27.由于所述第一角度位置信息是完成自标定后的摄像头20获取的,从而,所述第一角度位置信息能够反映目标物相对于交通工具200的真实角度位置。因此,可以将所述第一角度位置信息作为基准,对毫米波雷达30检测到的第二角度位置信息进行校正,从而,对所述毫米波雷达30的安装误差进行标定。
28.具体的,由控制器根据所述第一角度位置信息、所述第二角度位置信息和所述交通工具200的速度、曲率,确定所述毫米波雷达30的安装误差,并将所述安装误差发送给所述毫米波雷达30,以使所述毫米波雷达30根据所述安装误差进行标定。例如,当所述第一角度位置信息为0
°
、所述第二角度位置信息为2
°
时,所述控制器则可结合所述交通工具200的速度、曲率,计算出所述毫米雷达波的安装误差a,并将所述安装误差a发送给所述毫米波雷达30,从而,所述毫米波雷达30可以根据所述安装误差a进行标定,例如,通过补偿调整所述毫米波雷达30的内部参数,使得所述第二角度位置信息与所述第一角度位置信息一致,例如由2
°
变为0
°
。
29.在一些实施例中,所述控制器可以集成于所述摄像头20中,从而,形成能辅助毫米波雷达30的智能摄像头20。在一些实施例中,所述控制器也可以集成于所述毫米波雷达30中,从而,形成自标定的毫米波雷达30。
30.在一些实施例中,请参阅图2,所述系统100还包括第一can总线41,所述摄像头20
通过所述第一can总线41与所述交通工具200通信连接。例如,所述交通工具200上设有can总线接口202,所述can总线接口202的内部连接于交通工具200的can总线,所述第一can总线41的一端连接于所述can总线接口202,另一端连接于所述摄像头20,从而,使得所述摄像头20与所述交通工具200通信连接,以所述摄像头20可以获取所述交通工具200的车速、曲率等相关行驶信息。当所述控制器集成于所述摄像头20中时,通过上述第一can总线41,即可使得所述控制器获取到所述交通工具200的车速、曲率等相关行驶信息。当所述控制器集成于所述毫米波雷达30中时,由于所述控制器和所述摄像头20通信连接,所述控制器可以通过所述摄像头20获取到所述交通工具200的车速、曲率等相关行驶信息。
31.在一些实施例中,请参阅图2,还包括第二can总线42,所述毫米雷达波通过所述第二can总线42与所述摄像头20通信连接。从而,使得交通工具200、摄像头20和毫米波雷达30之间通过can总线通信连接。当所述控制器集成于所述摄像头20中时,通过所述第二can总线42,所述控制器就可以获取所述毫米波雷达30检测到的第二角度位置信息。当所述控制器集成于所述毫米波雷达30中时,通过所述第二can总线42,所述控制器就可以获取所述摄像头20检测到的第二角度位置信息。
32.在一些实施例中,所述系统100还包括供电电源,所述供电电源分别与所述摄像头20、所述毫米波雷达30和所述控制器连接,以对所述摄像头20、所述毫米波雷达30和所述控制器进行供电。为了方便,在一些实施例中,如图2所示,所述供电电源为所述交通工具200中的电源201,即所述摄像头20、所述毫米波雷达30和所述控制器分别与所述交通工具200中自带的电源201电连接。
33.在一些实施例中,所述摄像头20和所述毫米波雷达30均安装于所述交通工具200的上表面,使得所述摄像头20和所述毫米波雷达30不受遮挡,有益于对所述毫米波雷达30进行标定。
34.在一些实施例中,所述摄像头20和所述毫米波雷达30均处于所述交通工具200的纵向对称平面上,使得所述摄像头20和所述毫米波雷达30的相对位置关系简单,能够减少标定过程中的计算量,提高标定效率。
35.综上所述,本实用新型实施例提供的标定毫米波雷达的系统100,通过自标定后的摄像头20作为基准,能快速准确对毫米波雷达30的安装误差进行标定补偿,简单方便,且成本低。
36.本实用新型其中一实施例还提供了一种交通工具200,该交通工具200可以是大巴车、公交车或小轿车等。所述交通工具200包括上述实施例中的标定毫米波雷达的系统100。在实际应用时,直接将所述标定毫米波雷达的系统100安装在所述交通工具200上。其中,所述标定毫米波雷达的系统100与上述实施例中的标定毫米波雷达的系统100具有相同的结构和功能,在此不再一一赘述。
37.需要说明的是,本实用新型的说明书及其附图中给出了本实用新型的较佳的实施例,但是,本实用新型可以通过许多不同的形式来实现,并不限于本说明书所描述的实施例,这些实施例不作为对本实用新型内容的额外限制,提供这些实施例的目的是使对本实用新型的公开内容的理解更加透彻全面。并且,上述各技术特征继续相互组合,形成未在上面列举的各种实施例,均视为本实用新型说明书记载的范围;进一步地,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新
型所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1