差分电容感测系统的制作方法
差分电容感测系统
背景技术:
1.许多类型的机器和设备都是通过用户拉动或按下机械致动器(例如扳机、按钮等)来操作。对于某些设备,用户操作致动器的力会影响设备的操作。例如,用户扣动钻孔机的扳机的力度越大,钻孔机的马达旋转得越快,从而提高钻头的速度。一些设备使用电容感测来实现这种力敏控制机制。许多电容感测系统不直接测量电容,而是基于测量到的电极上的电荷变化间接确定电容。
2.然而,电极的电场和相对电荷会受到干扰电场、电极上的应力、触摸或其他干扰、温度、湿度等的影响,并且一些电容感测系统可能无法区分电极上的电荷的环境变化和电容变化。在钻孔机的示例中,干扰电场、温度、湿度等可能会改变致动器的电容,使得钻头比用户预期的更慢或更快,从而阻碍用户使用钻孔机执行任务的能力和增加受伤的风险。
技术实现要素:
3.一种示例装置包括限定间隙通路的四个固定电极和配置为沿着间隙通路移动的可移动电极。第一和第二固定电极相隔第一距离,并且第三和第四固定电极相隔第二距离。第一和第三固定电极相邻,并且第二和第四固定电极相邻。耦合到四个固定电极的电容感测电路使用第一和第二固定电极确定第一电容并使用第三和第四固定电极确定第二电容。在一些实施方式中,第一和第二固定电极在第一节点处耦合在一起,并且第三和第四固定电极在第二节点处耦合在一起。在一些实施方式中,可移动电极包括浮动电极。在一些示例中,可移动电极没有电连接到电容感测电路。
4.一些实施方式还包括相隔第七距离并垂直于第一和第二固定电极的第五和第六固定电极。第七和第八固定电极相隔第八距离并垂直于第三和第四固定电极。第五和第七固定电极相邻,并且第六和第八固定电极相邻。在一些实施方式中,第五和第六固定电极在第三节点处耦合在一起,并且第七和第八固定电极在第四节点处耦合在一起。
附图说明
5.对于各种示例的详细描述,现在将参考附图,其中:
6.图1示出包含电容感测控制致动器的设备。
7.图2示出图1中所示的电容感测控制致动器包括相对于固定电极移动的可移动电极。
8.图3a
‑
图3c示出可移动电极和两对相邻的固定电极的示例配置。
9.图4示出图3a
‑
图3c的电极的电气模型。
10.图5示出耦合到图3a
‑
图3c的电极用于测量可移动电极和固定电极的有效电容的示例差分电容感测电路。
11.图6a
‑
图6c示出可移动电极和四对固定电极的示例配置。
12.图7示出图6a
‑
图6c的电极的电气模型。
13.图8示出耦合到图6a
‑
图6c的电极配置用于测量可移动电极和固定电极的有效电
容的示例差分电容感测电路。
14.图9a
‑
图9b以流程图的形式示出使用差分电容感测电路确定可移动电极的位置的示例过程。
15.图10a
‑
图10f示出可移动电极和固定电极的进一步示例配置。
具体实施方式
16.所公开的差分电容感测系统涉及确定可移动电极(例如包括在用于控制设备操作的致动器中的可移动电极)的位置的基于电容的感测技术。所公开的差分电容感测系统包括被配置为两个或更多个电容器的多个导电电极。一些电极被固定在装置内的适当位置并形成间隙通路,并且当用户向致动器施加力时,可移动电极沿着间隙通路相对于固定电极移动。可移动电极沿着该通路的移动导致固定电极的电容的反向变化,使得可以根据差分电容测量值而不是绝对电容测量值来确定可移动电极的位置。由于所有的固定电极都以基本相同的方式受温度、湿度等因素的影响,因此在差分电容测量值中忽略环境条件引起的任何电容变化。
17.图1示出具有致动器110的设备100。通过施加力来移动致动器110。例如,个人可以推动或拉动致动器110,该致动器110可能由于弹簧或其他抗力机制而抵抗运动。可移动电极120耦合到致动器110。因此,随着致动器110移动,可移动电极120也移动。可移动电极120相对于固定电极移动,这未在图1中示出但在图3a
‑
图3c、图6a
‑
图6c和图9a
‑
图9f中详细示出。致动器110的运动促使设备100执行一种功能(例如,钻孔)。在该示例中,设备100包括马达125,该马达的速度通过(例如由个人的手指)施加力来控制—例如,马达的速度与施加到致动器110的力的大小成比例。可移动电极120形成两个或更多个电容器的一部分,其电容值随着移动电极移动而改变。电容值的变化由电容感测电路(下文讨论)来检测,并且电容值的变化导致由设备100执行的功能变化(例如,启动、停止、增加马达的速度、减小马达的速度等)。
18.图2示出可用于基于电容的感测技术的电极的一个示例。可移动电极120相对于固定电极210沿着由箭头205指示的通路移动。电极120和210由导电材料(例如金属)制成,或以其他方式涂覆有导电材料(例如金属)。固定电极210不会相对于使用它的设备(例如设备100)移动。在该示例中,固定电极210具有近似为矩形(例如矩形或圆角矩形)的横截面形状。在一些示例中,该矩形横截面形状近似为正方形。固定电极210具有内腔212,并且可移动电极120设置在内腔212内。在该示例中,可移动电极120的横截面形状也近似为矩形。可移动电极120和固定电极210的其他横截面形状也是可能的(例如,椭圆形、圆形等)。
19.图3a
‑
图3c示出可移动电极390和两对相邻的固定电极的示例配置300。配置300包括第一对固定电极310、320和与第一对固定电极相邻的第二对固定电极330、340。图3a示出配置300的斜视透视图。第一对固定电极310、320与第二对固定电极330、340分别相隔一定距离,使得这些固定电极在第一对固定电极310、320与第二对固定电极330、340之间限定间隙通路。可移动电极390沿着由箭头395a
‑
b指示的间隙通路移动。
20.图3b示出配置300的侧视图。在第一对固定电极中,电极310和电极320相隔一定距离,使得可移动电极390可以在电极310和电极320之间通过。在第二对电极中,电极330和电极340相隔一定距离,使得可移动电极390可以在电极330和电极340之间通过。可移动电极
390相对于固定电极310
‑
340沿着通路395的移动改变了可移动电极390与每对固定电极之间的表面积交叠量,进而改变可移动电极390与每对固定电极之间的电容。可移动电极390与特定的一对固定电极之间的表面积的增加对应于可移动电极390与另一对固定电极之间的表面积的减少,这导致两对固定电极的电容发生相反的变化。
21.随着可移动电极390沿着通路395在395a的方向上移动,可移动电极390与第一对固定电极310、320之间的表面积的数量增加。相反地,可移动电极390与第二对固定电极330、340之间的表面积的数量减少。随着可移动电极390沿着通路395在395b的方向上移动,可移动电极390与第一对固定电极310、320之间的表面积的数量减少。相反地,可移动电极390与第二对固定电极330、340之间的表面积的数量增加。也就是说,可移动电极390的移动使第一对固定电极310和320的电容变化与第二对固定电极330和340的电容变化是相反的。
22.第一对固定电极310、320与第二对固定电极330、340的电容的反向变化抵消了由于干扰电场和温度变化、湿度变化、气压变化、电源电压变化、设备参数的变化等引起的任何电容变化。第一对固定电极310、320与第二对固定电极330、340经历基本相同的环境条件,其以基本相同的方式影响第一对固定电极和第二对固定电极的电容。第一对固定电极310、320的电容相对于第二对固定电极330、340的电容的变化基本上是由可移动电极390沿着通路395的移动引起的,使得可移动电极390的位置可以基于第一对电极310、320与第二对电极330、340的电容的反向变化来确定。
23.图3c示出配置300在图3b中指示的y=y1和y=y2处的横截面。在y=y1处的横截面示出第一对固定电极310、320和可移动电极390。可移动电极390的表面370与固定电极310相邻并且与固定电极310相隔距离d1。可移动电极390的表面375与固定电极320相邻并且与固定电极320相隔距离d2。固定电极310耦合到节点350,并且固定电极320耦合到节点355。在y=y2处的横截面示出第二对固定电极330、340和可移动电极390。表面370与固定电极330相邻并且与固定电极330相隔距离d3。表面375与固定电极340相邻并且与固定电极340相隔距离d4。固定电极330耦合到节点360,并且固定电极340耦合到节点365。
24.理论上,表面370和375与固定电极310
‑
340之间的距离d1
‑
d4不会变化。但是,由于电极的表面的尺度和形状的制造公差、可移动电极390相对于固定电极310
‑
340的倾斜和/或包含电极配置300的设备所经历的振动,距离d1
‑
d4可能确实发生变化,从而改变第一对固定电极和第二对固定电极的电容。随着表面370与固定电极310和330之间的距离d1和d3减小,表面375与固定电极320和340之间的距离d2和d4增加。因此,由d1和d3的变化引起的表面370与固定电极310和330之间的电容的任何变化被表面375与固定电极320和340之间的电容的相应的相反变化抵消。类似地,由于可移动电极390在通路395内的倾斜导致的电容变化被抵消。例如,可移动电极390发生倾斜以使得d1和d4减小并且d2和d3增大。由d1
‑
d4的变化引起的固定电极310
‑
340的电容的相应变化被抵消。
25.图4示出在图3a
‑
图3c中示出的配置300中的电极的电气模型400。电容器c(310)表示由固定电极310和表面370形成的电容,而电容器c(320)表示由固定电极320和表面375形成的电容。电容器c(330)表示由固定电极330和表面370形成的电容,而电容器c(340)表示由固定电极340和表面375形成的电容。在该示例中,可移动电极390是浮动的,也就是说,可移动电极390不被通电地连接到电容感测电路。
26.穿过每个电容器的箭头指示每个电容器相对于该并联对中的另一个电容器的变
化,例如由于可移动电极390在通路395内的倾斜所致,使得可移动电极390与每个固定电极310
‑
340之间的距离d1
‑
d4变化。穿过一对电容器c(310)/c(320)或c(330)/c(340)中的每个电容器的箭头在相反方向上以指示一个电容器的电容的变化对应于该对中的另一个电容器的电容的相反变化。例如,随着可移动电极390在通路395内倾斜,距离d1增大并且c(310)的电容减小。距离d2减小并且c(320)的电容增大。穿过多对电容器c(310)/c(320)和c(330)/c(340)的较大虚线箭头指示每个电容器对相对于相邻电容器对(即c(310)/c(320)相对于c(330)/c(340))的变化。例如由于可移动电极390沿着通路395的移动,可移动电极390与固定的第一对电极310、320之间的表面面积增大,而可移动电极390与固定的第二对电极330、340之间的表面面积减小,并且反之亦然。可移动电极390沿着通路395的位置和移动可以根据第一对和第二对固定电极的电容测量值来确定。
27.图5示出耦合到图3a
‑
图3c的电极配置300的用于测量可移动电极和固定电极的有效电容的示例电容感测电路500。配置300中的电极由图4中示出的电气模型400表示。电容感测电路500耦合到节点350、355、360和365以确定每个节点处的有效电容。在该示例中,电容感测电路500包括控制器510、开关515a
‑
b、525a
‑
b、535a
‑
b、545a
‑
b、555a
‑
b和565a
‑
b以及电荷转移电容器c(转移)580a
‑
b。电容感测电路500实现电荷转移技术以确定第一对电容器c(310)和c(320)以及第二对电容器c(330)和c(340)的有效电容。
28.在一些示例中,控制器510是有限状态机。控制器510分别使用控制信号520a
‑
b来控制开关515a
‑
b的断开/闭合(开/关)状态,分别使用控制信号530a
‑
b来控制开关525a
‑
b的开/关状态,分别使用控制信号540a
‑
b来控制开关535a
‑
b的开/关状态,分别使用控制信号550a
‑
b来控制开关545a
‑
b的开/关状态,分别使用控制信号560a
‑
b来控制开关555a
‑
b的开/关状态,并且分别使用控制信号570a
‑
b来控制开关565a
‑
b的开/关状态。节点350连接到开关515a、525a和535a。节点355连接到开关545a、555a和565a。节点360连接到开关515b、525b和535b。节点365连接到开关545b、555b和565b。开关515a
‑
b和545a
‑
b进一步连接到参考电压节点505上的参考电压。开关525a
‑
b和535a
‑
b进一步耦合到接地节点。
29.控制器510接通开关515a或525a中的一个,但是不会同时将电容器c(310)连接到参考电压或接地。控制器510接通开关545a和555a中的一个,但是不会同时将电容器c(320)连接到参考电压或接地。当c(310)被连接到参考电压时,控制器510将c(320)连接到接地,反之亦然。类似地,控制器510接通开关515b或525b中的一个,但是不会同时将电容器c(330)连接到参考电压或接地。控制器510接通开关545b和555b中的一个,但是不会同时将电容器c(340)连接到参考电压或接地。当c(330)被连接到参考电压时,控制器510将c(340)连接到接地,反之亦然。
30.控制器510顺序地测量第一对固定电极在节点350和355处的有效电容和第二对固定电极在节点360和365处的有效电容。为了测量固定的第一对电极在节点350和355处的有效电容,控制器510可以促使节点350被接地并且促使节点355被连接到节点505处的参考电压。控制器510可替代地可以促使节点350被连接到节点505处的参考电压并且促使节点355被接地。因此,可以用节点350上的参考电压对c(310)进行充电,并且将节点355接地,或反之亦然。响应于c(310)被充电,开关515a、525a、545a和555a被控制器510断开。控制器510闭合开关535a或565a以通过控制器510分别从c(310)或c(320)汲取电流,从而对电荷转移电容器c(转移)580a充电。从c(310)或c(320)转移的电荷量是电容器的有效电容的函数,该有
效电容进而是随着可移动电极390沿着通路395移动时相应的固定电极与可移动电极390之间的表面面积覆盖量的函数。
31.控制器510计算在c(310)与c(320)之间转移到c(转移)580a的电荷量。在一个示例中,使c(转移)580a上的电压达到预定阈值电压所需要的电荷转移循环数(例如使用计数器来计算)确定c(310)和c(320)的电容。在另一个示例中,执行预定数量的电荷转移循环并且(例如经由模数转换器)测量c(转移)580a上的最终电压且将其映射到电容值。控制器510可以以类似的方式测量固定的第二对电极在节点360和365处的有效电容。可以使用用于确定电容的任何合适技术来代替电荷转移。每个充电/放电循环花费一秒的一部分,从而每一秒可以执行数百个或数千个充电/放电循环。
32.在节点350与可移动电极390之间的有效电容可以被表示为:
33.ceff(node 350;electrode 390)=c(310)+δc(310)+c(310)err
34.其中c(310)表示可移动电极390相对于固定电极310处于预设位置时的c(310)的电容;δc(310)表示由于可移动电极390沿着通路395的移动所导致的c(310)的变化;并且c(310)err表示由于可移动电极390的倾斜和d1的变化所导致的c(310)的变化。节点355与可移动电极390之间的有效电容的c(310)err和c(320)err具有相同的量值,但是对其各自的电容具有相反的效果。更靠近c(310)移动的可移动电极390对应于更远离c(320)移动的可移动电极390,导致由于可移动电极390的倾斜引起的电容变化被抵消。
35.剩余节点355、360和365与可移动电极390之间的有效电容可以以类似的方式表示。可移动电极390沿着通路395的位置可以基于这些有效电容来确定。但是,控制器510顺序地而不是同时测量节点350与355之间的有效电容以及节点360与365之间的有效电容。第一对和第二对固定电极可以在不同的测量时间经受不同的环境条件,使得干扰电场、电气快速瞬态等不被抵消。由电场、电气快速瞬态等引入的误差可能贯穿整个计算以确定可移动电极390沿着通路395的位置并导致错误的位置确定。虽然可以使用所测量的电容的过采样(oversampling)、阈值变化和进一步处理来识别错误的测量结果,但这些计算可能在计算上是昂贵的并且使电容感测电路500的操作复杂化。
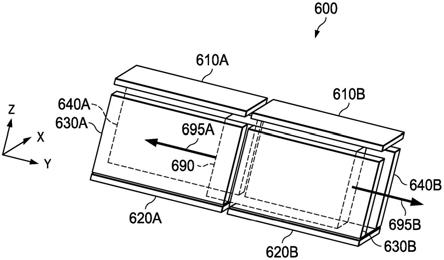
36.图6a
‑
图6c示出四对固定电极的可移动电极690的示例配置600。配置600包括第一对固定电极610a和620a、与第一对固定电极相邻的第二对固定电极610b和620b、第三对固定电极630a和640a以及与第三对固定电极相邻的第四对固定电极630b和640b。图6a示出配置600的倾斜透视图。第一对固定电极610a和620a、第二对固定电极610b和620b、第三对固定电极630a和640a以及第四对固定电极630b和640b各自相隔一定距离,使得固定电极限定间隙通路,例如通道(tunnel)。如由箭头695a
‑
b所指示,可移动电极690沿着间隙通路移动。
37.图6b示出配置600的侧视图。在第一对固定电极中,电极610a和电极620a相隔一定距离,使得可移动电极690可以在电极610a与电极620a之间通过。电极630a占据电极610a与电极620a之间的距离的一部分。虽然未示出,但电极640a与电极630a相隔一定距离,使得可移动电极690可以在电极630a与电极640a之间通过。在第二对电极中,电极610b和电极620b相隔一定距离,使得可移动电极690可以在电极610b与电极620b之间通过。电极630b占据电极610b与电极620b之间的距离的一部分。虽然未示出,但电极640b与电极630b相隔一定距离,使得可移动电极690可以在电极630b与电极640b之间通过。
38.第一对固定电极610a和620a与第二对固定电极610b和620b的电容的相反变化以
及第三对固定电极630a和640a与第四对固定电极630b和640b的电容的相反变化使得由于干扰电场和温度变化、湿度变化、气压变化、电源电压变化、设备参数等的变化等引起的任何电容变化失效。如本文先前参考图3a
‑
图3c中所示的配置300所讨论的,可移动电极690相对于固定电极610a
‑
640a和610b
‑
640b沿着通路695的移动改变了固定电极610a
‑
640a和610b
‑
640b与可移动电极690之间的电容。可移动电极690沿着通路695的移动及其位置可以基于第一对和第二对电极的电容的相反变化或基于第三对和第四对电极的电容的相反变化来确定。
39.图6c示出在图6b中示出的y=ya和y=yb处的配置600的横截面。在y=ya处的横截面示出第一对固定电极610a和620a、第三对固定电极630a和640a以及可移动电极690。可移动电极690的表面615与固定电极610a相邻,并且可移动电极690的表面625与固定电极620a相邻。固定电极610a和620a在节点650处耦合在一起。可移动电极690的表面635与固定电极630a相邻,并且可移动电极690的表面645与固定电极640a相邻。固定电极630a和640a在节点660处耦合在一起。当通过电容感测电路来测量节点650与660之间的有效电容时,节点650可以耦合到电源电压并且节点660耦合到接地,反之亦然。在一些实施例中,第三对固定电极630a和640a永久地耦合到接地并且不通过节点660处的开关耦合到电容感测电路。
40.在y=yb处的横截面示出第二对固定电极610b和620b、第四对固定电极630b和640b以及可移动电极690。可移动电极690的表面615与固定电极610b相邻,并且可移动电极690的表面625与固定电极620b相邻。固定电极610b和620b在节点670处耦合在一起。可移动电极690的表面635与固定电极630b相邻,并且可移动电极690的表面645与固定电极640b相邻。固定电极630b和640b在节点680处耦合在一起。当通过电容感测电路来测量节点670与680之间的有效电容时,节点670可以耦合到电源电压并且节点680耦合到接地,反之亦然。在一些实施例中,第四对固定电极630b和640b永久地耦合到接地并且不通过节点680处的开关耦合到电容感测电路。
41.如本文先前参考图3c中所示的配置300和距离d1
‑
d4所讨论的,表面615、625、635和645与四对固定电极之间的距离可能由于电极的表面的尺度和形状的制造公差、可移动电极690相对于固定电极610a
‑
640a和610b
‑
640b的倾斜和/或由包含电极配置600的设备经受的振动而变化。类似于配置300,由距离的变化引起的表面615
‑
645与固定电极610a
‑
640a或610b
‑
640b之间的电容的任何变化被相对表面与相对固定电极之间的电容的相应相反变化抵消。
42.图7示出图6a
‑
图6c中所示的配置600中的电极的电气模型700。电容器c(610a)表示由固定电极610a和表面615形成的电容,并且电容器c(620a)表示由固定电极620a和表面625形成的电容。电容器c(630a)表示由固定电极630a和表面635形成的电容,并且电容器c(640a)表示由固定电极640a和表面645形成的电容。电容器c(610a)和c(620a)被并联连接。电容器c(630a)和c(640a)被并联连接。c(610a)和c(620a)经由可移动电极690与c(630a)和c(640a)串联连接。
43.电容器c(610b)表示由固定电极610b和表面615形成的电容,并且电容器c(620b)表示由固定电极620b和表面625形成的电容。电容器c(630b)表示由固定电极630b和表面635形成的电容,并且电容器c(640b)表示由固定电极640b和表面645形成的电容。电容器c(610b)和c(620b)被并联连接。电容器c(630b)和c(640b)被并联连接。c(610b)和c(620b)经
由可移动电极690与c(630b)和c(640b)串联连接。在该示例中,可移动电极690是浮动的,也就是说,可移动电极690不被通电地连接到电容感测电路。
44.在每一对固定电极和相应的并联的多对电容器c(610a)/c(620a)、c(630a)/c(640a)、c(610b)/c(620b)和c(630b)/c(640b)内,该对电容器中的一个电容器的电容可以相对于另一个电容器变化,如本文中先前参考图4所讨论的。例如,由于可移动电极690在通路695内的倾斜,可移动电极690与每一个固定电极610
‑
640a和610
‑
640b之间的距离以及相应的电容可以变化。但是,该并联对中的一个电容器的变化对应于另一个电容器的相反变化。因此,在图7中未示出每个并联对中的那些电容变化。
45.穿过c(610a)
‑
c(640a)和c(610b)
‑
c(640b)的较大的虚线箭头指示每个电容相对于另一个电容的变化。例如由于可移动电极690沿着通路695的移动,可移动电极690与固定的第一对电极610a、620a和固定的第三对电极630a、640a之间的表面面积增大,而可移动电极690与固定的第二对电极610b、620b和固定的第四对电极630b、640b之间的表面面积减小,并且反之亦然。可移动电极690沿着通路695的位置和移动可以根据第一对和第二对固定电极的差分电容测量值和/或根据第三对和第四对固定电极的差分电容测量值来确定。
46.图8示出耦合到图6a
‑
图6c的电极配置600的用于测量可移动电极和固定电极的有效电容的示例电容感测电路800。配置600中的电极由图7中所示的电气模型700表示。电容感测电路800耦合到节点650、660、670和680以确定每个节点650、660、670和680处的有效电容。在该示例中,电容感测电路800包括控制器810a
‑
b、开关815a
‑
b、820a
‑
b、825a
‑
b、830a
‑
b、835a
‑
b和840a
‑
b以及电荷转移电容器c(转移)850a
‑
b。电容感测电路800实施电荷转移技术以确定第一对电容器c(610a)和c(620a)、第二对电容器c(610b)和c(620b)、第三对电容器c(630a)和c(640a)以及第四对电容器c(630b)和c(640b)的有效电容。可以使用用于确定电容的任何合适的技术来代替电荷转移。
47.控制器810a
‑
b与图5中所示的控制器510以类似的方式操作。虽然在该示例中控制器810a
‑
b被示出为两个不同的控制器,但是在其他实施例中由控制器810a
‑
b执行的功能可以仅由一个控制器或者由以级联方式工作的多于两个控制器执行。节点650连接到开关815a、820a和825a。节点660连接到开关830a、835a和840a。节点670连接到开关815b、820b和825b。节点680连接到开关830b、835b和840b。
48.节点650与可移动电极690之间的有效电容可以表示为:
49.ceff(650;690)=c(610a)n+c(620a)n
50.其中:
51.c(610a)n=c(610a)+δc(610a)+c(610a)err
52.以及:
53.c(620a)n=c(620a)+δc(620a)
‑
c(620a)err
54.其中c(610a)表示可移动电极690相对于固定电极610a处于预设位置时的c(610a)的电容;δc(610a)表示由于可移动电极690沿着通路695的移动所导致的c(610a)的变化;c(610a)err表示由于可移动电极690的倾斜所导致的c(610a)的变化;c(620a)表示可移动电极690相对于固定电极620a处于预设位置时的c(620a)的电容;δc(620a)表示由于可移动电极690沿着通路695的移动所导致的c(620a)的变化;并且c(620a)err表示由于可移动电极690的倾斜所导致的c(620a)的变化。对于c(610a)n,误差c(610a)err被添加,而对于c
(620a)n,误差c(620a)err被减去,因为可移动电极690的倾斜相反地影响固定电极610a和固定电极620a。节点670与可移动电极690之间、节点660与可移动电极690之间以及节点680与可移动电极690之间的有效电容可以被类似地表示。
55.可移动电极690沿着通路695的位置可以基于ceff(650;690)和ceff(660;690)的串联电容和ceff(670;690)和ceff(680;690)的串联电容来确定。ceff(650;690)和ceff(660;690)的串联电容可以被表示为:
[0056][0057]
ceff(670;690)和ceff(680;690)的串联电容可以被类似地表示。cserial(650;660)和cserial(670;680)的电容被用于确定可移动电极690沿着通路695的位置。在此参考图9a进一步描述该位置确定技术。
[0058]
可替代地,可移动电极690沿着通路695的位置可以基于与ceff(670;690)并联且与ceff(680;690)并联的ceff(650;690)和ceff(660;690)的串联电容来确定,该串联电容可以表示为:
[0059][0060]
对cserial(650;660||670||680)的差分电容是cserial(670;650||660||680),其可以被类似地表示。cserial(650;660||670||680)和cserial(670;650||660||680)的电容可以被用于确定可移动电极690沿着通路695的位置。cserial(660;650||670||680)和cserial(680;650||660||670)的电容也可以被用于确定可移动电极690的位置。在此参考图9b进一步描述该位置确定技术。
[0061]
因为每一对固定电极中的固定电极可以并联耦合在一起,所以由于可移动电极690的倾斜所导致的电容变化被抵消。类似地,可以同时确定节点650和670处的电容,使得固定电极610a、620a、610b和620b基本上经受相同的环境条件,例如干扰电场以及温度变化、湿度变化、气压变化、电源电压变化、设备参数等的变化。由于环境条件的变化所导致的电容的任何变化基本上被抵消,并且节点650处的电容相对于节点670处的电容的剩余变化基本上由可移动电极690沿着通路695的移动导致,使得可以基于电容的相反变化来确定可移动电极690的位置。
[0062]
图9a
‑
图9b以流程图形式示出使用电容感测系统确定可移动电极的位置的示例过程900a和900b。为了易于解释,在此参考图8中所示的电容感测系统800来描述过程900a和900b。在图9a中,过程900a包括步骤905,在此处控制器810a将节点650耦合到接地并且将节点660耦合到参考电压节点805。可替代地,控制器810a将节点660耦合到接地并且将节点650耦合到参考电压节点805。控制器810b使节点670和680与接地、参考电压节点805和电容感测电路800的其他部分断开连接。在步骤910处,控制器810a确定与第一对电容器c(610a)和c(620a)串联的第三对电容器c(630a)和c(640a)的第一有效电容以获得cserial(650;660)。
[0063]
在步骤915处,控制器810b将节点670耦合到接地并且将节点680耦合到参考电压节点805。可替代地,控制器810b将节点680耦合到接地并且将节点670耦合到参考电压节点805。控制器810a使节点650和660与接地、参考电压节点805和电容感测电路800的其他部分断开连接。在步骤920处,控制器810b确定与第二对电容器c(610b)和c(620b)串联的第四对
电容器c(630b)和c(640b)的第二有效电容以获得cserial(670;680)。在步骤925处,控制器810a
‑
b基于cserial(650;660)和cserial(670;680)确定可移动电极690沿着通路695的位置。可移动电极690的位置可以被提供给其他电路,这些电路可以被配合为基于可移动电极690的位置来修改它们的操作。
[0064]
在图9b中,过程900b包括步骤950,在此处控制器810a
‑
b将节点650耦合到接地并且将节点660、670和680耦合到参考电压节点805。可替代地,控制器810a
‑
b将节点650耦合到参考电压节点805并且将节点660、670和680耦合到接地。在步骤955处,控制器810a
‑
810b确定与并联电容器c(630a)和c(640a)、c(610b)和c(620b)以及c(630b)和c(640b)串联的c(610a)和c(620a)的第一有效电容以获得cserial(650;660||670||680)。在步骤960处,控制器810a
‑
b将节点670耦合到接地并且将节点650、660和680耦合到参考电压节点805。可替代地,控制器810a
‑
b将节点670耦合到参考电压节点805并且将节点650、660和680耦合到接地。
[0065]
在步骤965处,控制器810a
‑
810b确定与并联电容器c(610a)和c(620a)、c(630a)和c(640a)以及c(630b)和c(640b)串联的c(610b)和c(620b)的第二有效电容以获得cserial(670;650||660||680)。在步骤970处,控制器810a
‑
b基于cserial(650;660||670||680)和cserial(670;650||660||680)确定可移动电极690沿着通路695的位置。可移动电极690的位置可以被提供给其他电路,这些电路基于可移动电极690的位置来修改它们的操作。
[0066]
图10a
‑
图10f示出可移动电极和固定电极的更多示例配置的横截面。在图10a
‑
图10f中的每一个中,仅示出示例配置的一个横截面(例如“a”电极的横截面),但是示例配置包括对应的第二组电极(例如一组“b”电极)。虽然图3a
‑
图3c和图6a
‑
图6c示出矩形或正方形的电极,但是可以使用具有任何种类的对称形状的偶数个电极。图10a
‑
图10b示出圆形的固定电极和可移动电极。在图10b中,可移动电极1090被定形为中空圆柱体形,并且固定电极1030a被固定在可移动电极1090的通路1095的内部中。在图10c
‑
图10d中,固定电极1030a被固定在通路1095的内部中并且成十字形。虽然固定电极1010a和1030a的形状不同,但由可移动电极1090的移动引起的电容变化具有基于每个固定电极1010a和1030a的表面积的已知关系,使得仍然可以确定可移动电极1090的位置。在图10b和图10c中,外电极1010a被连接到地,其屏蔽该系统以免受电磁干扰并降低机电设置的复杂性,从而避免使用有源屏蔽,例如图10d中所示的屏蔽。在图10d中,固定电极1010a被有源电屏蔽1080包围。在图10e
‑
图10f中,固定电极1010a
‑
1040a和可移动电极1090具有交错板以增加固定电极与可移动电极1090之间的表面积,这与分别如图3a
‑
图3c和图6a
‑
图6c所示的电极配置300和600相比增加了电极配置1000e和1000f的电容和灵敏度。
[0067]
在整个说明书中使用了术语“耦合”。该术语可以涵盖实现与本公开的描述一致的功能关系的连接、通信或信号通路。例如,如果设备a生成信号以控制设备b来执行动作,则在第一示例中,设备a耦合到设备b,或者在第二示例中,如果中介部件c不会实质性地改变设备a和设备b之间的功能关系使得设备b通过由设备a生成的控制信号被设备a控制,则设备a通过中介部件c耦合到设备b。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1