基于专家知识的用于旋转机器的自动健康状态分类器的制作方法
1.本发明涉及一种指示机器故障的计算机实现的方法、数据处理系统和计算机程序产品,还涉及一种训练用于指示机器故障的神经网络的对应的机器和一种计算机实现的方法。
背景技术:
2.机器故障、尤其是由旋转部件的未对准或不平衡导致的旋转机器故障(例如在轴承内),通常会导致计划外停机以进行维修或准确地说是修理工作。为了在发生严重机器故障之前检测可能的机器故障,专家通过测量与相应部件的状态/功能相关的物理量(例如,振动、旋转速度、扭矩等),定期检查(旋转)机器的部件(例如,马达、驱动轴等)的状态或功能。
3.从所测量的物理量导出用于评估相应部件的状态/功能的某些值(例如,包络谱、谐波峰值、边带等)。特别是来自相应部件的可能受损频率的谐波峰值和边带是特定故障及其严重程度的指标。由于连接的旋转机器(例如在制造工厂的生产线中)数量大或者由于物联网(iot)设备多,这种大量的(旋转)机器的状况构成了巨大挑战。
4.专家通过分析(旋转)机器的受监测部件(例如,马达)的振动信号的频谱,手动或半自动地指示例如马达的特定故障。可以定期记录单个(旋转)机器的状态,从而可以收集历史数据。简单的关键性能指标(kpi)(例如均方根(rms)或波峰因数)的值和趋势通常用于确定故障类型、严重程度和估计的进度。由于在实际应用中负载迥然不同,kpi可能会产生误导,因为强度似乎较高但其根本原因不是进一步损坏,而是由于负载或环境条件。许多已知的自动算法通过分析简单的kpi给出特定故障的指示。这些方法大多不是很准确,并且它们不能指示故障的具体类型。
5.us 2017/0315516公开了一种用于监测包括可移动部件的设备,特别是旋转设备的装置,其中该装置包括控制模块,该控制模块接收由连接到设备的传感器提供的设备的测量振动信号,提供测量振动信号的频谱,预处理该频谱以确定基频和边频,其中,基频是具有峰值功率的频率,对应于设备的特征频率或故障频率,边频对应于其他频率,其中,控制模块通过对基频和边频分别应用一类分类来附加地处理基频和边频,合并一类分类的计算结果以获得代表置信水平的分类信号,并且基于分类信号输出决策支持信号,其中决策支持信号指示受监测设备的错误状态。
6.cn107560849涉及一种用于多信道深度卷积神经网络的轴承故障诊断的风力涡轮机方法,包括步骤:使用振动加速度传感器下的驱动端和反驱动端的抖动加速度信号,同时采集测试轴承的各种状态;对采集到的振动信号应用时频分析技术,获得对应的时频频谱;建立深度卷积神经网络诊断模型,使用时频频谱和轴承状态作为训练样本,训练诊断模型;评估诊断模型,并且将该诊断模型应用于要监测的轴承。该方法可以实现自动表征学习,并且避免特征工程,有效地利用多信道振动信号,具有良好的通用性和扩展性。
7.us 6,301,572公开了一种用于跟踪振动体诸如燃气涡轮机的长期性能的系统和
方法,该振动体包括使用快速傅立叶变换处理将时域输出变换到频域的振动传感器。提供频域输出作为模糊自适应共振理论神经网络的输入。来自网络的输出可以耦合到专家系统进行分析、耦合到显示设备以呈现给操作者,或者可以用于其他控制和信息目的。
8.因此,本发明的目的是提供具体(旋转)机器故障的可靠的自动指示。
技术实现要素:
9.本发明提供了一种根据独立权利要求1的指示机器故障的计算机实现的方法以及用于指示机器故障的数据处理系统和计算机程序产品,进一步提供了一种根据其它独立权利要求的训练用于指示机器故障的神经网络的对应的机器和计算机实现的方法。实施例和改进是各个从属权利要求的主题。
10.根据本发明的第一方面,一种指示机器故障、尤其是旋转机器故障的计算机实现的方法包括以下步骤:
11.a)接收至少一个输入信号,该至少一个输入信号基于机器、尤其是旋转机器的至少一个机器部件的由至少一个传感器监测的至少一个物理量。
12.b)将至少一个输入信号变换(特征工程)成至少一个特征。该至少一个特征具有与至少一个输入信号不同的域,并且附加地或替代地具有不同的参考值。
13.c)通过神经网络基于至少一个特征预测至少一个机器故障、尤其是至少一个旋转机器故障的类别(故障类型)以及附加地或替代地预测严重程度。神经网络根据至少一个特征的具体模式或指示具体机器故障、尤其是具体旋转机器故障的多于一个特征的模式的组合进行训练。
14.根据本发明的第二方面,一种用于指示机器故障、尤其是旋转机器故障的数据处理系统包括用于执行本发明第一方面的方法的步骤的装置。
15.根据本发明的第三方面,一种用于指示机器故障、尤其是旋转机器故障的计算机程序产品包括指令,当计算机执行程序时,该指令使计算机执行根据本发明的第一方面的方法的步骤。
16.根据本发明的第四方面,一种机器、尤其是旋转机器,包括至少一个机器部件和至少一个传感器。该传感器通过监测至少一个机器部件的至少一个物理量生成至少一个输入信号。该至少一个输入信号被提供给根据本发明的第二方面的数据处理系统。
17.机器例如发电机、内燃机、铣床、普通车床、工业机器人等具有至少一个移动机器部件。该移动机器部件可以是相对于机器的其他部件移动的任何种类的机器部件,例如接头、轮毂、驱动轴等。在机器的操作期间,移动的机器部件可能偏离最佳操作状态。这种偏差可以是由移动部件的损坏、负载的变化、控制机器错误等引起的。这种与机器部件正常操作状态的偏差可导致机器故障,机器故障最终可导致机器严重损坏。
18.在步骤a)中,监测机器部件的至少一个物理量,例如振动、温度、力、扭矩、旋转速度/角速度/线速度/加速度等。因此,在相应的(旋转)机器处提供至少一个合适的传感器,诸如温度传感器、振动传感器、加速度传感器、位置传感器、力传感器等。
19.可以用合适的传感器监测多于一个物理量,例如可以用附接到机器部件的振动传感器监测机器部件的振动。可以用温度传感器监测机器部件的温度或机器部件内部的温度(例如,旋转机器部件的油浴温度)。可以用旋转传感器监测旋转速度。可以用加速度传感器
监测加速度(或从加速度导出的力或速度)。相应的传感器基于相应的受监测的物理量生成输入信号,并且输入信号被提供给数据处理系统且由数据处理系统接收。
20.在步骤b)中,至少一个输入信号被变换成至少一个特征。例如,输入信号可以被标准化并且附加地或替代地,kpi例如rms、波峰因数和/或标准偏差可以作为输入信号的特征被导出。此外,输入信号可以(附加地)变换到另一个域,例如,振动信号可以例如借助于快速傅立叶变换(fft)从时域(f(t))变换到频域(f(f)),或加速度信号可以从时域(f(t))变换到3d域(f(x,y,z))。此外,输入信号可以变换成使得特征具有与输入信号不同的参考值,例如,温度信号可以从摄氏度(℃)变换成开尔文(k),或者机器部件的速度信号可以是相对速度的信号,该相对速度必须被变换(与机器的相关部件的速度叠加)成绝对速度(例如,由机器的臂移动的旋转元件)。此外,可以在变换的步骤中确定统计值。例如,在变换时,可以首先将输入信号变换到另一个域中,然后可以从中导出统计特征。这些变换可以被称为特征工程。
21.在步骤c)中向神经网络提供至少一个“工程化”特征。神经网络已经被训练成使得它可以基于至少一个机器故障的所提供的至少一个特征、类别(故障类型,例如磨削轴承等)以及附加地或替代地严重程度(例如,至少状态“良好”、“中等”、“严重”)进行预测。具体机器故障(例如,磨削轴承、微裂缝、泄漏、短路等)表现为至少一种特征的具体模式或多于一种特征的模式的组合。因此,神经网络已经基于指示机器故障的至少一个特定类别和/或严重程度的成组训练特征的模式进行训练。
22.目标尤其是使用具有抽象输入参数的(深度)神经网络,即至少一个与专家用来识别机器故障特性(类别和严重程度)的特征相似的特征。
23.由神经网络预测的机器故障的类别和/或严重程度可以报告给用户(例如,技术人员、技工人员、轮班主管、设施工程师等),该用户可以启动必要的步骤以避免机器故障或避免当前机器故障的恶化。换言之,神经网络的输出为用户提供了易于理解的关于机器状态或其机器部件状态的值(“什么样的故障以及故障有多严重”)。可替代地,该方法可以包括自动地启动适当对策的另外的步骤,例如重新定位机器的可移动部件、重新填充冷却剂或润滑剂等。
24.通过自动通知机器故障,可以减少由于服务或维修而导致的停机时间。此外,可以避免对机器的严重损坏,因为神经网络可以及早预测机器故障。
25.根据本发明的改进,至少一个受监测的物理量是至少一个机器部件的振动,并且至少一个生成的输入信号是步骤a)中的振动信号。
26.根据本发明的进一步改进,至少一个传感器是通过监测至少一个机器部件的振动生成振动信号的振动传感器。
27.尤其是连续移动机器诸如旋转机器的振动指示多个(旋转)机器故障。因此,通过单独监测(旋转)机器的振动或优选地通过附加地监测另外的物理量诸如旋转速度、扭矩或负载,可以基于振动信号以及优选地其它物理量的其它信号所变换成的特征的模式来预测多个(旋转)机器故障中的至少一部分。
28.振动能够识别许多(旋转)机器故障,而只需很少的监测和计算工作。
29.根据本发明的改进,至少一个机器部件是马达。
30.特别是马达、例如发电机的柴油马达或机器人的电动马达,是在操作期间具有恒
定状态的旋转机器部件。例如,在正常/最佳操作期间所生成的马达的振动、旋转速度和扭矩是相当恒定的。如果马达在操作期间处于非正常/最佳状态,则所生成的振动将偏离在正常/最佳操作状态中的振动,并且旋转速度和扭矩可不同于正常或不连续/不稳定。
31.因此,可以特别有效地指示具有马达的旋转机器故障。
32.根据本发明的改进,在步骤b)中,输入信号被变换成输入信号的频谱,并且优选地附加地变换成随机特征,并且最优选地变换成随机力矩和/或变换成用于频谱的主要部分的能量。
33.例如,(对于预定义的时间跨度的)振动的频谱对于某些机器故障是唯一的。因此,输入信号的频谱非常能指示某些机器故障。如果输入信号的频谱中包含的信息进一步补充有随机力矩和/或频谱主要部分的能量,例如随机力矩和/或振动信号谐波频率周围的频带的能量,则可以实现机器故障的类别和严重程度的更精确的区分。此外,从变换后的频谱或输入信号可以导出统计特征,例如rms、显着性、方差等。
34.通过将输入信号变换成其频谱并且附加地变换成随机力矩和/或变换成频谱主要部分的能量,可以显着提高机器故障指示的精确度。
35.根据本发明的改进,神经网络是深度神经网络。
36.深度神经网络包括多于一个层,优选地多于四个层,更优选地多于七个层,最优选地十层或更多层。每层可以包括多个神经元或节点。优选地,每层可以包含十个或更多个,更优选地50个或更多个,并且最优选地100个或更多个神经元。
37.深度神经网络增加了预测(旋转)机器故障的类别和/或严重程度的确定性。
38.根据本发明的改进,神经网络被部署在云系统中或在机器所处场地的本地计算机基础设施上。
39.只有神经网络或包括负责接收和变换至少一个输入信号(步骤a)和步骤b))的数据处理系统的部分的整个数据处理系统可以被部署在云系统中。
40.通过部署在云系统中的(深度)神经网络,可以完成位于不同站点的多台机器的机器故障的指示,由此(例如,不同的公司)可以共享用于指示机器故障的基础设施。如果将神经网络部署在(一家公司的)场地的本地计算机基础设施上,则可以更快和更频繁地完成(一家公司的)场地中的(旋转)机器的机器故障的指示。
41.根据本发明的改进,计算机实现的方法还包括以下步骤:
42.d)随时间变化将该至少一个特征以及优选地附加的至少一个机器部件的相应机器故障的类别(故障类型)以及附加或可替代的至少一个机器部件的相应机器故障的严重程度存储为至少一个机器部件的历史数据。
43.e)基于至少一个机器部件的该历史数据导出至少一个机器部件的剩余寿命。
44.存储机器部件的历史记录(机器故障的历史数据)。基于该历史记录(随时间变化的机器故障的类别/严重程度)或从中导出的信息,例如机器故障的发生率,可以预测相应机器部件的剩余寿命。此外,可以基于所述历史记录生成相应机器部件的审计跟踪。
45.可以基于至少一个机器部件的导出的剩余寿命最小化生产线/制造工厂的停机时间,因为可以在相应机器部件出现故障之前安排和组织相应机器部件的更换。
46.根据本发明的第五方面,一种训练用于指示根据本发明的第一方面的机器故障、尤其是旋转机器故障的神经网络的计算机实现的方法包括以下步骤:
47.i)生成至少一组的至少一个训练特征。该至少一个训练特征从机器、尤其是旋转机器的至少一个训练输入信号导出。至少一个训练特征的具体模式或多于一个训练特征的模式的组合指示具体的机器故障,尤其是具体旋转机器故障。至少一个训练输入信号用相应机器故障的已知类别和已知严重程度进行标记。
48.ii)使用至少一组的至少一个训练特征训练神经网络。
49.训练输入信号对应于输入信号并且训练特征对应于在根据本发明的第一方面的指示机器故障的方法中使用的特征。用于预测至少一个机器部件的机器故障的神经网络需要学习所提供的特征的模式中的线索。因此,该组训练特征包含在相应机器部件(或类似机器部件)的特定机器故障期间生成的训练输入信号的特征。该组训练特征使用相应机器故障、尤其是机器故障的类别和/或严重程度进行标记,同时(通过相应的传感器)生成相应的训练输入信号。
50.根据本发明的改进,在步骤i)中,输入信号是来自真实机器的真实输入信号或来自机器的人工模型的模拟信号或它们两者的组合。
51.据此构建模拟训练数据库,从而生成噪声的基带频谱标记和特性特征,由此在训练数据集中可检测(并标记)真实机器故障的特征,故障严重程度可以分为多个损坏级别(至少良好/中等/严重)并且生成具有大量统计变化的特征,以涵盖各种应用程序和机器。此外,神经网络(模型)可能通过少量的训练数据变得高度泛化。
52.根据本发明的改进,神经网络是预训练的神经网络。
53.通过训练通常被用于从工业数据中获取信息的预训练神经网络,可以显著减少成组训练特征的时间和数量。
附图说明
54.随后通过附图中所示的示例性实施例将更详细地解释本发明及其技术领域。示例性实施例仅有助于更好地理解本发明,并且在任何情况下均不应被解释为对本发明范围的限制。特别地,如果没有明确地以不同方式描述,则可以提取附图中描述的主题的方面并且将其与本说明书或附图的其他构成要素和发现相结合。相同的附图标记指代相同的对象,从而可以补充使用来自其他附图的解释。
55.图1示出根据本发明的第一方面的实施例的指示机器故障的计算机实现的方法的示意流程图。
56.图2示出根据本发明的第二方面的实施例的用于指示机器故障的数据处理系统的示意图。
57.图3示出根据本发明的第四方面的实施例的机器的示意图。
58.图4示出根据本发明的第五方面的实施例的训练用于指示机器故障的神经网络的计算机实现的方法的示意性流程图。
具体实施方式
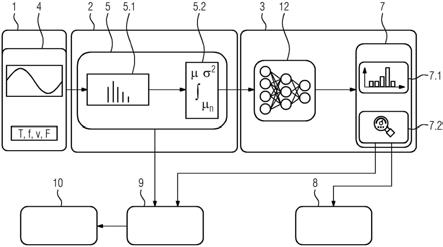
59.在图1中,示意性地描绘了根据第一方面的指示机器故障的计算机实现的方法的实施例。计算机实现的方法包括步骤接收1、变换2和预测3以及可选步骤的启动8。计算机实现的方法还包括步骤存储9和导出10。
60.首先,在接收1的步骤中接收1包括温度信号t、振动信号f、旋转速度信号v以及扭矩信号f的输入信号4。由旋转机器的监测旋转机器的马达的对应传感器生成输入信号4。
61.在变换2的步骤中,输入信号4被变换2成特征5。输入信号中的一些被变换成频谱5.1,即振动信号f被变换成频域中的频谱。旋转速度信号v被变换成速度域中的速度频谱。此外,从变换频谱5.1或输入信号4导出统计特征5.2,例如rms、显着性、方差等。
62.特征5被提供给神经网络12,该神经网络在步骤预测3中预测机器故障7的类别(故障类型)7.1和严重程度7.2。神经网络已经用多组训练特征进行了训练,这些训练特征分别用在生成底层输入信号期间存在的机器故障的相应类别和严重程度进行标记。
63.可选地,预测的机器故障7的类别7.1和/或严重程度7.2用于自动地启动8对策,例如重新定位机器的可移动部件、重新填充冷却剂或润滑剂等。
64.此外,在存储9的步骤中,特征5和可选的马达的预测机器故障7的类别7.1和/或严重程度7.2随时间变化地被存储为马达的历史数据。换言之,马达的历史记录(机器故障的历史数据)被存储。
65.在导出10的步骤中,基于马达的历史数据导出马达的剩余寿命。基于历史记录(随时间推移的机器故障的类别/严重程度)或从中得出的信息,例如机器故障的发生率,导出马达的剩余寿命。此外,可以基于所述历史记录生成马达的审计跟踪。
66.在图2中,示意性地描绘了根据第二方面的实施例的用于指示机器故障的数据处理系统100。数据处理系统100被尤其布置和配置成执行图1的计算机实现的方法。另外,数据处理系统100包括用于变换的系统11、用于进行预测的神经网络12以及尤其用于存储预测的系统13。系统/实体11、12和13中的每个可以包括用于执行图1的方法的各个步骤的中央处理单元(cpu)、用于接收和/或传输数据的通信单元(com)以及存储单元(sto)。
67.由系统11接收输入信号4。系统11将输入信号4变换成特征5。特征5被传输到神经网络12,该神经网络基于特征5预测机器故障7的类别7.1和严重程度7.2。输入信号4和预测的机器故障7的类别7.1与严重程度7.2被传输到系统13,这些被存储在该系统中。基于存储的输入信号4和预测的机器故障7的类别7.1和严重程度7.2,导出马达的剩余寿命。
68.在图3中示意性地描绘了旋转机器20。旋转机器20包括马达21以及用于监测马达21的温度的温度传感器s1、用于监测马达21的振动的振动传感器s2、用于监测马达21的旋转速度的速度传感器s3以及用于监测马达21的扭矩的扭矩传感器s4。受监测的物理量、温度、振动、旋转速度和扭矩作为输入信号4被传输到图2的数据处理系统100。
69.在图4中,示意性地描绘了训练用于指示机器故障的神经网络的计算机实现的方法。该计算机实现的方法包括步骤生成31和训练32。
70.在步骤生成31中,生成至少一组训练特征。训练输入信号对应于输入信号4,并且训练特征对应于图1的指示机器故障的方法中使用的特征5。从马达的对应训练输入信号中导出训练特征。训练特征的具体模式或训练特征的模式的组合指示具体机器故障、特别是具体旋转机器故障。
71.训练输入信号用相应机器故障的已知类别和已知的严重程度进行标记。用于预测马达的机器故障的神经网络需要学习所提供特征5的模式中的线索。因此,该组训练特征包含在相应机器部件的某个机器故障期间生成的训练输入信号的特征(或类似的机器部件)。该组训练特征用(由相应的传感器)生成对应的训练输入信号时存在的机器部件的相应机
器故障、特别是机器故障的类别和/或严重程度进行标记。
72.在训练32的步骤中,使用至少一组训练特征来训练神经网络。
73.尽管在本文已经展示和描述了具体实施例,但是本领域普通技术人员将理解的是存在多种替代和/或等效实现方式。应当理解,一个或多个示例性实施例仅是示例,并不旨在以任何方式限制范围、适用性或配置。相反,前述概述和详细描述将为本领域技术人员提供用于实现至少一个示例性实施例的便利的指导方针,应当理解,可以对示例性实施例中描述的元件的功能和布置进行各种改变而无需脱离所附权利要求及其法律等同物所阐述的范围。通常,本技术旨在涵盖本文讨论的具体实施例的任何修改或变化。
74.在前述详细描述中,出于简化本公开的目的,在一个或多个示例中将各种特征组合在一起。应当理解,以上描述旨在是说明性而非限制性。它旨在涵盖可能被包括在本发明范围内的所有替代、修改和等同物。在阅读上述说明书后,许多其他示例对于本领域技术人员来说将是显而易见的。
75.前述说明书中使用的具体命名法用于提供对本发明的透彻理解。然而,根据本文提供的说明书,对于本领域技术人员来说显而易见的是,为了实践本发明不需要具体细节。因此,本发明的具体实施例的前述描述是出于说明和描述的目的而呈现的。它们并非旨在是详尽的或将本发明限制为所公开的精确形式;显然,鉴于上述教导,许多修改和变化是可能的。
76.选择和描述了实施例以便最好地解释本发明的原理及其实际应用,从而使本领域的其他技术人员能够最好地利用本发明和具有适合于预期的特定用途的各种修改的各种实施例。在整个说明书中,术语“包含(including)”和“其中(in which)”分别用作相应术语“包括(comprising)”和“在其中(wherein)”的简单英语等同物。此外,术语“第一”、“第二”以及“第三”等仅用作标记,并非旨在对其对象的重要性强加数字要求或建立某种重要性等级。在本说明书和权利要求的上下文中,连词“或”应理解为包括(“和/或”)而不是唯一的(“不是
……
就是”)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1