一种用于读取磁性PUF的传感器阵列的制作方法
一种用于读取磁性puf的传感器阵列
1.相关申请的交叉引用
2.本技术作为序列号为16/429,710的美国专利申请的部分延续申请,要求该美国专利申请的优先权和权益,该美国专利申请的标题为“magnetometer chip sensor array for reading a magnetic puf,including a magnetic puf film or tape,and systems incorporating the reader”,申请日为2019年6月3日。本技术还根据35u.s.c.119(e)要求美国临时申请第62/896,883号和第62/942,364号的优先权和权益,美国临时申请第62/896,883号的标题为“magnetic sensor array device for reading a magnetic puf”,申请日为2019年9月6日;美国临时申请第62/942,364号的标题为“magnetic sensor array device for reading a magnetic puf”,申请日为2019年12月2日。
3.背景
1.发明领域
4.本发明总体上涉及用于测量puf指纹中的磁场的传感器阵列,更具体地说,涉及一种包含该传感器阵列的puf读取器设备。
5.2.相关技术的描述
6.第9,553,582号美国专利通过引用并入本文,其公开了一种包含磁性粒子的puf(物理不可克隆函数),该磁性粒子在puf部件的表面附近产生复杂的磁场。该磁场可以沿着路径来测量,并且与磁场分量相对应的数据被记录,以用于后续对puf部件进行比较和认证。第9,608,828号美国专利通过引用并入本文,其公开了在注射成型工艺之前磁化进料(feed stock)以实现磁化方向的随机取向的优点。在这些专利中,ndfeb合金的薄片被引用为优选的磁性粒子,然而也可以使用其他磁性材料、合金和粒子形状。这些薄片通常约为35微米厚,具有宽度从100-500微米变化的不规则形状,但可以大体上从这些范围变化。ndfeb合金不易磁化,因为它的内禀矫顽力(intrinsic coercivity)在9000奥斯特左右。然而,一旦磁化,合金具有约为9000高斯的剩余感应,并且粒子和薄片的随机位置和磁取向在距离puf表面约0.5mm处测量时产生的磁场强度尖峰约为
±
10-35高斯。
7.磁性puf技术可以应用于创建puf标签,用于认证护照、安全id卡和其他非旋转对象。对于这些应用,在非旋转的二维区域上测量的磁性puf表面附近的复杂磁场结构可以作为磁性“指纹”。对于读取静止或平移puf的非旋转系统,需要低成本的磁性puf指纹认证方式。在旋转式puf传感器系统中,单个传感器可以围绕穿过puf指纹的圆形路径以多个角度测量磁性分布值。这可以使用单个3轴霍尔效应传感器来实现,因为puf元件的旋转使得能够使用单个磁强计芯片在高空间频率下采样指纹。对于没有移动部件的非旋转puf系统,在多个位置对磁性指纹进行采样需要多个磁场传感器,或者需要puf相对于传感器的移动(类似于信用卡刷卡)。考虑到由puf样本产生的预期信号幅度,至少0.1高斯的分辨率是优选的。
8.发明概述
9.伪造商品问题正在迅速升级,并且影响到许多市场和地区,其中不仅包括粗心大
意的消费者购买的零售产品,还包括对公共安全和国家安全至关重要的产品。最近的一项研究预测,全球伪造品跨广泛的行业领域造成的年度经济影响超过1万亿美元,占全球经济总产出的2%以上。除经济影响外,随着假冒产品出现在药品(例如处方药)、医疗设备(例如外科钻头)、食品产品(例如婴儿配方奶粉)、护肤品(例如化妆品)、酒类(例如波旁威士忌)和汽车设备(例如气囊控制装置)中,伪造品还对公共安全产生风险。公共交通系统(例如飞机和火车)中使用的备件也容易被伪造,如果公共交通系统发生故障,可能会造成危及生命的后果。
10.伪造品现在也是保护国家安全的许多系统的主要威胁。电子部件回收率的增加,增加了有缺陷、不合标准或未经授权复制的部件进入供应链并影响用于国防的关键军事系统(例如飞机、武器)的可能性。用于保护边境不被非法进入的重要政府身份证件(如护照)也有被伪造的风险,并且有证据表明,伪造品也是向威胁个人和国家的恐怖组织提供现金的一种方式。
11.对于所有这些伪造威胁,需要改进的方法来识别和消除伪造产品,以防止其进入供应链,并以这些负面方式影响个人的生活或国家。独特的物理对象包含来自随机的随机制造过程的高熵,使得它们几乎不可能被复制,为基于密码算法的认证方法提供了一种改进的替代方案,而密码算法通常使用容易被复制的集成电路。这种独特的物理对象(也称为物理不可克隆函数或puf)可以基于物理领域中任何随机发生的属性,诸如电、光或磁。当独特的物理对象与能够从该对象提取所有熵的高分辨率感测系统和用来保存从该对象感测到的熵数据(用于后续认证该对象)的安全存储库相结合时,这可以形成提供提高的安全性的新认证系统的基础。
12.在us 9,553,582中公开了这样一种新的认证系统,该系统基于独特的物理对象,在该系统中独特的物理对象是puf(物理不可克隆函数),puf包含在大小、形状和取向上随机的磁性粒子,当磁化时,磁性粒子在puf部件的表面附近产生(在幅度和方向上)复杂的和随机的磁场。该磁场可以沿着路径测量,并且与磁场分量相对应的数据被记录,以用于后续对puf部件进行比较和认证。us 9,608,828公开了在注射成型工艺之前磁化进料以实现磁化方向的随机取向的优点。
13.在这些专利中,ndfeb合金的薄片被引用为优选的磁性粒子,然而也可以使用其他磁性材料、合金和粒子形状。这些磁性粒子具有大于25μm的直径,并且具有从50μm到500μm的平均直径,并且其平均厚度小于直径。来自puf表面的磁场是由磁化后的ndfeb合金产生的,一旦ndfeb合金被磁化,其具有约为9000高斯的剩余感应,并且当用磁传感器在距离puf表面约0.5mm处测量时,粒子和薄片的随机位置和磁取向产生的磁场强度尖峰为+/-10高斯到35高斯。当用磁传感器从到puf部件的距离小于0.5mm处测量时,磁场强度增加到大于+/-35高斯。puf部件表面上的非均匀磁场在幅度和方向上是随机的,并且在小于500μm的距离处可以跨puf部件的表面发生显著变化,并且在小于1mm的距离处可以发生完全的峰到峰变化。
14.用这些特性构造的独特物理对象puf部件在其表面上产生磁场,该磁场可以用诸如上面公开的读取器设备来感测。本系统公开了磁强计芯片传感器阵列,该磁强计芯片传感器阵列提供了二维感测系统,该二维感测系统能够在非旋转的二维区域上测量磁性puf表面附近的复杂磁场结构。
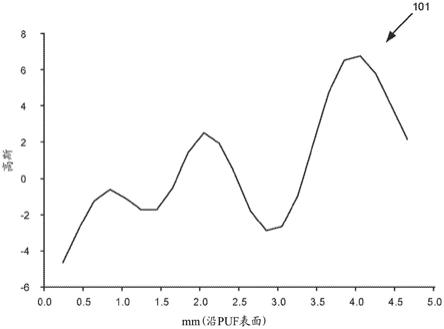
15.如图1所示,代表性磁性puf指纹的z分量(垂直于puf表面)在沿puf表面行进的0.1mm-0.2mm范围内没有显著变化。这是因为本示例中的霍尔效应传感器或感测元件在产生磁场的磁化薄片上方大约0.5mm-1.0mm处。对于相关技术中讨论的薄片尺寸,用于采样和验证磁性指纹的经济的霍尔效应传感器阵列将使传感器标称间隔大约至少0.4mm的间距。这种近似值的平均薄片长度为0.3mm。最小分离度与粒子长度的比值约为1.33。
16.使用多个离散的3轴磁强计芯片可以构造一个低成本的puf指纹读取器。例如,1.46mm
×
1.46mm晶圆级芯片尺寸封装可以放置在一个中心到中心间隔为2mm的电路卡上。在本示例中,这将使3轴霍尔效应传感器的5
×
5阵列能够放置在10mm
×
10mm窗口内,对于这样的布置,这将导致感测位置跨越8mm
×
8mm窗口。
17.非旋转puf部件从二维区域感测到的随机3轴磁场可以作为该认证系统的磁性“指纹”。
18.在一些应用中,希望制造尽可能小的puf标签,以降低标签的成本,但这样做并不降低由独特物理对象的随机磁场特性提供的安全性。在这种情况下,可以使用范围(最小直径25μm,并且平均直径50μm到500μm)下端的磁性粒子尺寸,当用距离puf部件表面0.5mm的磁传感器进行测量时,该磁性粒子尺寸可以产生在+/-10高斯到35高斯的范围的下端的磁场幅度。在这样的系统中,为了避免磁场数据因降维而导致的任何丢失,有必要将传感器阵列的二维空间分辨率提高到粒子直径范围(25μm-500μm,含25μm和500μm)。此外,由于磁场强度与距离的立方成反比,为了放大由+/-10高斯到35高斯范围下端的小粒子产生的磁场强度,将传感器阵列到puf部件表面的距离减小到0.5mm以内是很重要的。
19.在又一些其它应用中,希望制造尽可能大的puf标签,以通过从较大的磁性“指纹”提供更多的随机数据来最大限度地提高系统的安全性。在这种情况下,磁性粒子的范围可以是最小直径25μm到平均直径50-500μm,并在被距离puf部件表面0.5mm的磁传感器测量时产生+/-10高斯到35高斯范围的磁场。为了以最高准确度(为了最高安全性的需要来减少假正例(false positive)和假反例(false negative))测量像这样具有非均匀磁场的puf部件,需要将传感器阵列的二维空间分辨率提高到粒子直径范围(25μm-500μm、含端点)。进一步,为了以最高准确度测量大的puf标签(例如,大于1mm
×
1mm),需要使用传感器阵列,该传感器阵列具有能够一次测量puf部件的整个表面的大视场(而不用相对于puf部件移动传感器),其具有校准跨传感器阵列的任何传感器到传感器变化的装置,以及具有在进行测量时减小传感器相对于puf部件移动引起的测量畸变的装置。
20.本发明公开了在用于测量跨二维puf部件表面的磁场时提高磁传感器阵列测量准确度、分辨率和吞吐量的方法。来自这些改进测量的多轴磁场数据可以与诸如皮尔逊相关函数(或类似的模式识别算法)的验证算法相结合,以实现对正品puf和非正品puf的更高可靠性的识别,从而在任意小的和任意大的二维puf的假正例和假反例方面增加系统的安全性。
21.附图简述
22.在这样概括描述了本发明之后,现在将参考附图,这些附图不必按比例绘制,并且其中:
23.图1示出了代表性磁性puf指纹的z分量。
24.图2示出了有puf材料附着其上的打印机墨盒。
25.图3示出了具有传感器阵列的读取器设备。
26.图4示出了具有两个部分的读取器元件。
27.图5示出了具有两个独立部分的读取器。
28.图6示出了puf读取器设备的底部等距视图。
29.图7示出了邻近puf的puf读取器设备的顶部等距视图。
30.图8和图9示出了puf读取器设备的分解视图。
31.图10示出了两轴磁传感器。
32.图11示出了三轴磁传感器。
33.图12示出了现有技术一轴磁传感器。
34.图13示出了磁传感器阵列器件,该磁传感器阵列器件由多个磁传感器晶粒(sensor die)组成,这些磁传感器晶粒单独从晶圆锯切出并在集成电路封装中组装在一起。
35.图14示出了组装在印刷电路卡上的一个或更多个磁传感器阵列器件。
36.图15示出了磁传感器阵列器件,该磁传感器阵列器件由多个磁传感器晶粒组成,这些磁传感器晶粒作为组从晶圆锯切出并作为一个单元组装在集成电路封装中。
37.图16示出了组装在印刷电路卡上的磁传感器阵列器件。
38.图17示出了具有形成二维磁传感器阵列的十六个磁传感器阵列器件的测量系统。
39.图18示出了磁传感器阵列器件的组织,在磁传感器阵列器件中多个多轴磁传感器以二维阵列布置在公共半导体衬底上。
40.图19示出了在半导体衬底上构造的单片多轴磁传感器阵列的特征。
41.图20示出了图19的器件放置在印刷电路卡上。
42.图21示出了单片磁传感器阵列。
43.图22a、图22b和图22c示出了减小磁传感器阵列到puf部件的距离的构造过程。
44.图23示出了采样和保持电路,该采样和保持电路集成到磁传感器的每个轴中,并为二维阵列中的每个磁传感器复制。
45.图24a和图24b示出了磁传感器阵列,该磁传感器阵列分为四个和十六个部分,其中温度传感器放置在每个部分的拐角处。
46.图25示出了分布在磁传感器阵列上的非功能性磁传感器的一部分。
47.详细描述
48.应理解的是,本公开不将其应用限于在以下描述中阐述或在附图中示出的部件的结构和布置的细节。本公开能够用于其它实施例,并且能够以各种方式被实践或执行。并且,应理解本文所使用的措辞、术语和尺寸是出于描述的目的而不应被看作是限制。如在此使用的,术语“具有”、“包含(containing)”、“包括”、“包含(comprising)”等是开放式术语,其指示所述元件或特征的存在,但不排除附加元件或特征。冠词“一个(a)”、“一个(an)”和“the”意在包括复数和单数,除非上下文另有明确指示。“包括”、“包含”或“具有”及其变形的使用在本文中意在包括在其后列出的项和其等同物以及附加的项。诸如“关于”之类的术语用于描述对象的各种特性,并且这些术语对于相关领域的普通技术人员具有其普通的和习惯的含义。磁性粒子的尺寸、粒子之间的间隔和传感器位置是相互关联的,并且可以相对于彼此按比例缩放以提供不同尺寸的解决方案。
49.现在将在下文中参考附图更全面地描述本发明,其中示出了本发明的一些但不是所有实施例。实际上,本发明可以以许多不同的形式实施,并且不应被解释为限于本文所述的实施例;更确切地,提供这些实施例使得本公开将满足适用的法律要求。相似的数字在整个视图中指代相似的元素。
50.使用多个传感器芯片的挑战之一是组装的puf读取头(read head)内的霍尔效应传感器元件的精确物理位置的制造公差。芯片封装的放置精度通常可以是
±
0.05mm。此外,感测元件在每个尺寸的芯片封装内具有
±
0.05mm的公差。因此,给定传感器的相对测量位置的不确定度为
±
0.1mm。通过对芯片阵列进行x射线扫描来测量传感器元件在x-y坐标方向上的位置,可以降低相对x和y间距的不确定性。一种较便宜的方法是使用校准夹具在大于传感器芯片之间的标称距离(中心到中心)的x-y坐标窗口上精确扫描puf对象。来自相邻传感器的重叠数据可用于确定传感器元件的相对位置。
51.进行了计算机模拟,以研究在一个阵列中需要多少传感器才能达到测试结果不是假正例的期望置信度。在模拟中,指纹登记数据在x和y坐标方向上每隔0.1mm被记录在puf表面。此外,每个传感器芯片的高度z随机变化
±
0.05mm。当puf读取头阵列与登记的puf标签接触以测量其指纹时,假设验证传感器阵列的位置与登记数据窗口在
±
1mm内对齐。一种相关算法,通过计算磁场的每个分量的皮尔逊相关r值并将这些分量相乘,即r
xyz
=r
x
*ry*rz,来根据登记指纹图来测试模拟的验证读数。对于指纹登记数据内的多个阵列位置,这种相关性是优选的。任何其他合适的统计分析都可以用于将验证读数与登记值进行比较。
52.通常,当磁传感器相距超过1mm时,每个传感器位置处的磁场值基本上变成了独立变量。如果仅使用一个传感器来认证磁场,那么在登记数据中沿着x和y坐标维度可以找到与该传感器的磁场读数匹配的概率很高。随着多个磁传感器沿x和y坐标维度以已知距离分开,发现假正例匹配的概率降低。如果概率只降低到0.01,那么伪造者可以生产数百个puf部件,并测试其集合,以收集那些碰巧被验证算法接受的部件。需要低得多的假正例结果概率,才能使这种伪造策略的成本过高。
53.为了评估伪造者产生随机匹配的概率,使用4、5、6、7、8、12、16、20和24个(3轴)磁传感器对磁性puf读取器进行了数百次模拟,以生成随机匹配(假正例)概率的估计值。在这些模拟中,磁传感器标称(nominally)间隔2mm。对数百个验证分数的统计分析表明,4个(3轴)传感器的阵列将产生8.20e-02的通过测试结果(即,8.20%的通过率)。这种安排并不能提供“通过”项目是真实可信的高置信度。将传感器位置的数量增加到5会产生大约概率为4.20%的假正例。表1显示了当测试随机puf部件时,使用皮尔逊相关r值r
xyz
生成高于0.7的验证分数的概率。对概率的对数的分析证实,概率的对数是传感器数量的线性函数。
54.在不增加传感器数量的情况下减少随机匹配的一种方法是,如果puf读取器测量指纹,移动至少0.5mm,并进行第二次测量。使用皮尔逊相关r值的两个认证分数都高于0.7的概率显示在第三列中。统计分析表明,如果进行第二次测量,4个(3轴)传感器组成的阵列将产生的测试结果通过率约为0.672%。虽然随机puf部件的通过概率显著降低,但这给用户带来了移动读取器和对磁性指纹进行第二次测量的负担。类似地,可以使用机械装置将puf读取器传感器阵列自动移动1mm,这会增加成本。
[0055][0056]
考虑到磁传感器芯片的低成本,优选实施方式将是使用在读取器头中具有更多的传感器芯片的puf读取器,以实现与此处通过皮尔逊相关r值测量的置信度相同的置信度。应该注意,如果磁传感器不执行磁场的所有三个正交轴的测量,则需要额外的传感器测量来补偿来自每个传感器的减少的信息。
[0057]
参考图2,示出了在特征211和221上附着有puf材料的打印机墨盒201。这种puf材料可以制成从固定块到薄带的各种厚度。puf可以应用到表面上或模制到供应品中。
[0058]
图3中示出了读取器设备301,读取器设备301具有例如被示为紧邻puf表面的多个传感器311a、311b和311c。传感器位置的数量总共十二(12)个,在图3中的读取器设备上示出,该数量在本例中由可以提供打印机墨盒安全认证的应用所需的安全级别确定。
[0059]
读取器可以包含可以以任何图案布置在平面上的传感器阵列。传感器必须标称间隔一个最小距离,以提供明显不同的场值。优选的间隔将大约是1mm,但该距离不是限制性的。如上所述,每个传感器在传感器阵列中的已知相对位置的精度是必要的。间距与粒子长度的优选比值为3.33,但该比值不是限制性的。
[0060]
图3的读取器可用于附着在图2中的211和221处的两个puf。然而,读取器并不局限于特定的表面。221处的puf具有三个可供读取的表面(底面231、侧面241和顶面251)。此外,只要从传感器校准中已知/预定了三个侧面的相对位置,读取器就可以环绕三个侧面。
[0061]
如上所述,如果通过传感器的离散移动测量更多的位置,则可以减少传感器的数量。这可以通过在读取器上添加一个致动系统来实现,例如,机械的或机电的致动系统。
[0062]
图4示出了具有两个部分411a和411b的读取器元件。每个部分具有诸如例如431a、431b和431c的传感器阵列,如果这些部分如图4中那样邻接,则传感器可以定位成相邻,或者如图5中那样传感器以连接元件521确定的固定距离分离,图5示出了两个分离的部分511a和511b。每个分离的部分具有传感器阵列,诸如,例如531a、531b和531c。图4中的相邻模式具有12个传感器位置。如果允许两组传感器面(face)在认证测量期间移动大于来自图4中的相邻模式的最小分离距离的距离,则这样增加了另外12个传感器位置,从而提高了安全级别。
[0063]
具有两个部分的读取器的示例实施例是打印机上的用于由用户插入和移除的具
有磁性puf的墨盒。本领域普通技术人员已知的简单机械凸轮或杠杆动作可以在向前运动期间将各部分推到一起,并在反向运动中将各部分分开。另一个实施例将是使用打印机的盖门来致动在图4的相邻以及图5的分离之间的组件。
[0064]
参考图6,示出了puf读取器设备601,其可以包含图3、图4和图5的读取器元件。传感器阵列611位于读取器设备601的底部。传感器阵列611可以用环氧树脂或其他聚合物材料灌封,以保护其免受静电、污垢或其他因素的干扰/损坏。如图7所示,通过将阵列定位在设备的底部,其可以被放置在紧靠(接触)puf 711的位置。在图7中,puf元件是通过挤压工艺制成的薄膜或带,其厚度优选为0.05mm至1.50mm。利用合适的粘合剂背衬(adhesive backing)(未示出),可以将一段puf带粘贴到待识别元件的表面。但是,可以使用其他puf元件来代替带。此外,puf元件可与本地的相关联的非易失性存储器结合使用,其中非易失性存储器包含从磁化粒子测量的磁场分布数据。磁场分布数据也可以被在线存储或存储在云位置中,以便以后访问。此外,在线存储或在云位置中存储的数据可以对应于用于选择相关登记数据的条形码或qr码数据。
[0065]
磁化粒子可以含有钕、铁和硼,或其他化合物,诸如钐和钴,或任何其他能产生可测量磁场的磁性材料。
[0066]
puf读取器设备601可具有相机或其他观看元件641,以协助定位设备、读取快速响应(“qr”)码或其他识别标记、相对于基准(fiducial)来定向设备、或以其他方式提供puf711的光学取向。观看显示器701允许用户观看由相机镜头捕获的图像。观看显示器701也可以是用于操作puf读取器设备601的触摸屏。诸如led或其他适当照明的照明元件621和631,照亮相机图像。
[0067]
图像传感器可以是互补金属氧化物半导体(cmos)或半导体电荷耦合器件(ccd)或其他类似器件,以测量来自puf材料的图像或光学反射率。
[0068]
可选地,可以移除观看元件、照明器和显示器,并且可以使用诸如引导边缘(未示出)的物理特征或其他适当的元件来定向puf读取器设备601和puf 711。
[0069]
puf读取器设备,如图8和图9中的分解图所示,可以由电池801或其他电源供电。
[0070]
如前所公开的,布置在印刷电路卡上的磁传感器的二维阵列是测量puf部件表面上的磁场的有效手段,其中puf相对于传感器不旋转。为了提高puf部件表面上的磁场测量的精度,需要将磁传感器阵列的二维空间分辨率提高到平均磁性粒子直径(最小直径25μm,而平均直径50-500μm)的范围内,这大大小于之前公开的磁传感器阵列中传感器的中心到中心间距2mm。
[0071]
磁传感器描述
[0072]
本发明中描述的优选磁传感器阵列由多个2轴或3轴霍尔效应磁传感器构成,每个霍尔效应磁传感器被设计成对多于一个轴上的磁场敏感,但是应该注意,磁传感器阵列也可以使用被设计成对多于一个测量轴上的磁场敏感的任何磁传感器(不一定是霍尔效应传感器)来构成。
[0073]
这种被设计成对2轴或3轴上的磁场敏感的2轴磁传感器(图10)或3轴磁传感器(图11)将与被设计成只对1轴上的磁场敏感的1轴磁传感器(图12)区别开来。图10示出了用于x方向1011的第一霍尔传感器1001和用于y方向1012的第二霍尔传感器1002,这个传感器被设计成对两个轴上的磁场敏感。在图10中示出了用于第一霍尔传感器1001的电引线1021a、
1021b、1021c和1021d,这些电引线存在于本文中所示的所有霍尔传感器中,但未针对每个传感器示出。电引线可以连接在霍尔传感器的不同位置,而不是所示的位置,以提供所需的特定特性。图11示出了用于x方向1011的第一霍尔传感器1101、以及用于y方向1012的第二霍尔传感器1102、以及用于z方向1013的附加的第三霍尔传感器1103,以便对三个轴上的磁场敏感。霍尔传感器1101、1102和1103的位置不限于相对于彼此处于拐角点几何配置(corner geometry configuration)。唯一的要求是,每个霍尔传感器需要被定位以解析3个正交磁场值。图12示出了1轴传感器1201。现有技术表明,用1轴磁传感器进行的磁场测量可以与软件算法相结合,以估计其他两轴的磁场强度,但精度和准确度不如用设计成对两轴或三轴上的磁场敏感的磁传感器进行的测量。这样的单轴磁传感器对于最高准确度的多轴磁场测量或计算其他方向分量所需的时间是不够的。
[0074]
然而,设计成对两轴上的磁场敏感的磁传感器可以与软件算法结合,以对于应用具有足够的准确度估计第三轴的磁场。最后,设计了一种对全部三轴上的磁场敏感的磁传感器,其无需估算或后计算就能够提供对全部三轴上的磁场的测量值。使用以下方法将这些多轴传感器中的一个以上布置在一维或二维阵列中。
[0075]
离散磁传感器阵列描述
[0076]
用于构造具有提高的二维空间分辨率的磁传感器阵列的第一方法结合了多个磁传感器晶粒,其中每个晶粒包含磁传感器,该磁传感器被设计成对一个以上轴上的磁场敏感,其中每个晶粒使用半导体制造工艺构造,其中每个晶粒分别从晶圆锯切出,并且其中多于一个晶粒在集成电路封装(诸如,多芯片模块(mcm),但不限于此)中组装在一起,以形成包含以空间分辨率小于1.5mm的阵列布置的多个磁传感器的集成电路器件,这是对以上公开的改进。
[0077]
在这种器件中,多个晶粒可布置在多层高密度互连(hdi)衬底上,其提供改进的布置和增加的布线密度,从而可将传感器晶粒之间的间距减小到低至0.1mm。然后,组装的磁传感器晶粒(多于一个晶粒)的衬底可以封装在诸如多芯片模块(mcm)的集成电路封装中,并且这些器件中的一个或更多个可以组装在印刷电路卡上,以形成具有中心到中心低至1.1mm(具有1mm/边的传感器晶粒)的任意尺寸的二维视场和改进的二维空间分辨率的磁传感器阵列。磁传感器阵列中的传感器的中心到中心间距的减小使得能够使用诸如本文所公开的puf读取器沿着puf部件的表面进行更高分辨率的磁场测量。
[0078]
图13提供了这样的磁传感器阵列器件的图示,该磁传感器阵列器件由多个磁传感器晶粒组成,这些磁传感器晶粒分别从晶圆锯切出并在集成电路封装中组装在一起。在该示例中,16个单独的晶粒1301以4
×
4布置1321组装在多层高密度互连(hdi)衬底1311上,并封装在大约5mm/边(具有1mm/边的晶粒)的多芯片模块(mcm)封装中。还可以用诸如环氧树脂(图13中未示出)的覆盖物封装具有组装的传感器芯片(晶粒)的衬底1311。焊球(图15中的1531)放置在衬底的底部(环氧树脂的相对侧)上,并用于将mcm连接到印刷电路卡1401。图13和图14显示了mcm封装的顶部,底部也看起来像具有焊球1531的1521(见图15)。图13和图14中的圆圈指示传感器在每个晶粒的周界内的位置,但这些圆圈不是单独的元件。组装在hdi衬底上的单个磁传感器晶粒的许多其他布置(例如1
×
2、2
×
2、2
×
3、3
×
3、3
×
4、4
×
5、5
×
5等)以及使用诸如如系统级封装(sip)的其他多晶粒集成电路封装是可能的。
[0079]
图14提供了以0.4mm的标称间距组装在印刷电路卡上以将阵列的尺寸增加到任意
尺寸的一个或更多个磁传感器阵列器件的图示。在该示例中,16个磁传感器阵列器件1321(每个包括单独晶粒1301的4
×
4阵列)以4
×
4布置组装在印刷电路卡1401上,形成能够测量20
×
20mm视场上的磁场的16
×
16磁传感器晶粒阵列。另一个示例(未示出)是以2
×
2布置组装在印刷电路卡上的4个器件(每个器件包含单独晶粒的4
×
4阵列)的组合,形成能够测量10
×
10mm视场上的磁场的8
×
8磁传感器晶粒阵列。许多其他组合可以构造具有范围从1mm
×
1mm到大于20mm
×
20mm的任意大小的二维视场的磁传感器阵列。
[0080]
用于构造具有提高的二维空间分辨率的磁传感器阵列的第二方法结合了多个磁传感器晶粒,其中每个晶粒包含磁传感器,该磁传感器被设计成对一个以上轴上的磁场敏感,其中每个晶粒使用半导体制造工艺来构造,其中一个以上晶粒作为单元从晶圆中锯切出,并且在每个单元包含多个晶粒的情况下,一个或更多个单元在集成电路封装(诸如多芯片模块(mcm)或晶圆级封装(wlp),但不限于此)中组装在一起,以形成包含以空间分辨率小于1.5mm的阵列布置的多个磁传感器的集成电路器件,这是对以上公开的改进。
[0081]
在这种器件中,从晶圆中锯切出多个晶粒作为单元并将该多个晶粒的单元组装成集成电路器件将传感器晶粒之间的空间减小到低至0.1mm,该0.1mm是半导体晶圆上每个单独晶粒之间的划片槽(scribe line)1331和密封线1341的典型距离。划片槽1331是围绕密封环的周边区域,用于从硅晶圆切割(锯切出)单独晶粒。密封环1341(针对晶粒1301示出)是围绕晶粒制造的结构,以防止在切割期间裂纹和污染物进入晶粒。
[0082]
这些器件中的一个或更多个可以组装在印刷电路卡上,以形成具有任意尺寸的二维视场和提高的二维空间分辨率的磁传感器阵列,该磁传感器阵列中心到中心低至1.1mm(具有1mm/边的传感器晶粒)。磁传感器阵列中的传感器的中心到中心间距的减小使得能够使用诸如上面公开的puf读取器沿着puf部件的表面进行更高分辨率的磁场测量。
[0083]
图15提供了这样的磁传感器阵列器件的图示,该磁传感器阵列器件由多个磁传感器晶粒组成,这些磁传感器晶粒作为组从晶圆1501锯切出并作为一个单元被组装在集成电路封装中。在该示例中,由16个晶粒组成的多晶粒单元1511作为4
×
4单元从晶圆锯切出,并通过将焊球1531放置在晶粒单元1521的顶部并(可选地)将晶粒单元的底部(未示出)封装在环氧树脂中,将多晶粒单元1511组装在倒装晶圆级封装(wlp)中,该倒装晶圆级封装为大约5mm/边(具有1mm/边的晶粒)。然后将该器件自上而下放置,并通过熔化焊球连接到印刷电路卡上。组装成wlp的多个锯切晶粒阵列尺寸的许多其他布置(例如1
×
2、2
×
2、2
×
3、3
×
3、3
×
4、4
×
5、5
×
5等)以及使用诸如倒装芯片bga(fcbga)的其他集成电路封装是可能的。
[0084]
图16提供了以0.4mm的标称间距组装在印刷电路卡1601上以将二维阵列的尺寸增加到任意尺寸的一个或更多个磁传感器阵列器件的图示。在该示例中,16个磁传感器阵列器件1611(每个包括多个锯切晶粒1612的4
×
4阵列)以4
×
4布置被组装在印刷电路卡1601上,形成能够测量20
×
20mm视场上的磁场的磁传感器晶粒的16
×
16阵列1621。该布置用列号1631和行号1641示出。另一个示例(未示出)是以2
×
2布置组装在印刷电路卡上的4个器件(每个器件包括多个锯切晶粒的4
×
4阵列)的组合,形成能够测量10
×
10mm视场上的磁场的8
×
8磁传感器晶粒阵列。许多其他组合可以构造具有范围从1mm
×
1mm到大于20mm
×
20mm的任意大小的二维视场的磁传感器阵列。
[0085]
离散磁传感器阵列测量方案
[0086]
在一个自动化系统中,其中多个puf部件在磁传感器阵列器件上连续快速移动,并
且每个puf部件的独特磁场“指纹”被记录和存储以供以后在认证过程中验证,希望减少每个单独puf部件的磁场测量时间,并且还减少连续测量之间的时间,以便增加总测量吞吐量。本发明提供了一种方式,当使用诸如在图13-17中所示的由多个晶粒构成的磁传感器阵列器件时,提高连续进行的多个磁场测量的吞吐量。
[0087]
一种使用由多个晶粒组成的磁传感器阵列器件来缩短puf部件的磁场测量时间的方法是将多个磁传感器晶粒布置成二维阵列,该二维阵列被组织成多行多列,其中每个晶粒包含一个或更多个磁传感器,其中一行中的每个磁传感器晶粒被配置成响应不同的地址,并且其中列中的每个磁传感器晶粒(例如通过i2c或类似物)全部或部分连接到共享总线并由专用总线主设备控制和读取。这使得磁传感器晶粒的一个或更多个列(例如,列数等于2的n次方,其中n=2、3、4、5、6、7、8)能够全部或部分地由连接到磁传感器晶粒的一个或多个列的全部或部分的专用总线主设备同时寻址和测量。然后,每个总线主设备可以独立地对磁传感器晶粒的每一行的地址进行排序,同时测量磁传感器晶粒的一个或更多个列的全部或部分,直到阵列中的所有行都被寻址并且所有磁传感器晶粒都被测量。这种组织将整个磁传感器晶粒阵列的测量时间减少到仅为磁传感器晶粒的一列的全部或部分的测量时间。
[0088]
图17提供了这样的测量系统的图示,其中16个磁传感器阵列器件1711(每个器件包括唯一寻址的磁传感器晶粒的4
×
4阵列)布置在4
×
4阵列中,形成被组织为16行1731
×
16列1721的二维磁传感器阵列1701。16个列1721中的每一列都连接到专用总线主设备(示为fpga或asic控制器1741),专用总线主设备唯一地寻址列中的16个晶粒中的每一个。这使得每列一个的16个总线主设备1751中的每一个能够独立地对一列中的16行1731中的每一个的地址进行排序,以便并行地测量16列中的每一个,从而将整个阵列的测量时间减少到测量一列所需的时间。
[0089]
通过为一个或更多个列中的磁传感器晶粒的一部分提供专用总线主设备(例如,其中列数等于2的n次方,其中n=2、3、4、5、6、7、8,并且并行测量一个或更多个列中的晶粒的一部分(例如,其中该部分的数量等于2的n次方,其中n=2、3、4、5、6、7、8),可以进一步减少测量时间。例如(未示出),如果为16列中的一半(例如,上半部1735和下半部1736)提供专用总线主设备,并且并行地测量32个半列,则整个阵列的测量时间减少到测量一半的列的时间。在极限情况下,如果为磁传感器阵列中的每个晶粒提供专用总线主设备,则阵列中的每个晶粒可以并行测量,将整个阵列的测量时间减少到测量一个晶粒的时间。
[0090]
使用由多个晶粒组成的磁传感器阵列器件来减少多个puf部件的连续磁场测量之间的时间的方法是:将来自第一磁场测量的测量数据全部或部分到主计算机的传输与进行第二磁场测量全部或部分重叠。测量过程的全部或部分与传输过程的全部或部分的重叠使得能够在第一测量的数据被全部或部分地传输之前进行第二测量的全部或部分,从而增加了测量吞吐量。
[0091]
实现这一点的方式是通过在测量控制器(在图17中示为fpga或asic控制器1741)中包括存储器缓冲器1761,存储器缓冲器1761可以暂时存储来自整个或部分阵列的第一测量的测量数据,同时整个或部分阵列的第二测量正在进行中。来自第一测量的测量数据的全部或部分通过主计算机接口1771(例如usb)从存储器缓冲器传输到主计算机1781,同时进行第二测量的全部或部分。存储器缓冲器可以适当地调整大小,以便传输到主计算机的
时间与进行测量的时间密切匹配。这种优化使得数据从存储器缓冲器到主计算机的传输的完成时间能够与第二次测量的完成时间大致相同。在这一点上,来自第二测量的测量数据被存储在存储器缓冲器中,并且第三测量与第二测量数据被传输到主计算机同时开始。这个过程一直持续到所有的磁场测量完成为止。
[0092]
单片磁传感器阵列描述
[0093]
用于构造具有提高的二维空间分辨率的磁传感器阵列的第三方法结合了多个磁传感器,其中每个磁传感器被设计成对一个以上的轴上的磁场敏感,其中在同一半导体晶圆上制造多于一个传感器,其中晶圆上传感器之间的中心到中心间距小于最大平均磁性粒子直径(例如500μm),并且其中每个晶粒被单独地从晶圆上锯切,并且其中一个或更多个晶粒在集成电路封装(诸如多芯片模块(mcm)或晶圆级封装(wlp)中,但不限于此)中被组装在一起,以形成集成电路器件,其包含以二维阵列布置的多个磁传感器,空间分辨率小于500μm,并且在某些情况下空间分辨率小于100μm,这与前面公开内容相比是显著的改进。
[0094]
由于半导体工艺技术所提供的小型化,任意大的多轴磁传感器阵列(例如,192个传感器行
×
192个传感器列=36864个多轴传感器)可以集成在一起,其中每个多轴磁传感器的尺寸非常小(小于500μm
×
500μm,在某些情况下小于100μm
×
100μm),并且间隔非常紧密(小于100μm)。这种能力大大减小了阵列中多轴磁传感器的中心到中心间距。将中心到中心间距减小到更接近磁性粒子直径(最小25μm,而平均50-500μm)的范围,能够使用诸如上文所公开的puf读取器沿puf部件表面进行最高分辨率的磁场测量。
[0095]
图18提供了这种磁传感器阵列器件1801的组织的图示,其中多个(2
×
2,这里示出,但可以是任意尺寸)多轴磁传感器1811(类似于图10或图11中示出的那些)以二维阵列布置在公共半导体衬底(未示出)上,并由电压源1841供电。沿着水平行的磁传感器用公共行选择线1821访问,并且沿着垂直列的磁传感器用公共列访问线1822连接。如1822所示,列线可以是每个传感器轴唯一的,或者由未示出的多个传感器轴共享。图18显示了唯一的列线/传感器轴,但也可以为多个轴共享列线,尽管图中没有显示。模拟多路复用器1851将来自所选传感器的模拟电压连接到读出(readout)通道,该读出通道由放大1861、补偿1871和数字化1881组成,这些是将磁传感器检测到的模拟电压转换为数字输出1891所必需的。这种组织使得阵列中的多个传感器能够通过使用多个读出通道来并行读取。
[0096]
图19提供了构造在半导体衬底1911上的单片多轴磁传感器阵列1901(192行
×
192列)的特征的图示,半导体衬底1911包括磁传感器阵列1901、读出通道1921a、1921b、模拟电压发生器1931和数字控制逻辑1941。模拟电压发生器为磁传感器阵列和支撑电子设备提供电压和电流偏置。读出通道包括将磁传感器检测到的模拟电压转换为数字输出所必需的放大、降噪、补偿和数字化。数字控制逻辑引导磁场测量、读出数据并将结果发送到主计算机(未示出)。
[0097]
图20提供了图19中的器件的图示,图19中的器件包括192
×
192个磁传感器的阵列并且组装在大约20mm/边的集成电路封装(诸如wlp)中,并且当其放置在印刷电路卡2001上时,能够测量大约20mm
×
20mm视场上的磁场。另一个示例(未示出)是一种包含96
×
96个磁传感器的阵列并组装在大约10mm/边的集成电路封装(例如wlp)中的器件,并且当其放置在印刷电路卡上时,能够测量大约10mm
×
10mm视场上的磁场。许多其他尺寸的具有等效视场的二维磁传感器阵列通过以下方式也是可能的:使用半导体制造技术来构造具有成本效益
的、具有任意大小视场的高分辨率磁传感器阵列器件,以高速测量二维表面上的磁场。
[0098]
单片磁传感器阵列测量方案
[0099]
在一个自动化系统中,其中多个puf部件在磁传感器阵列器件上连续快速移动,并且每个puf部件的独特磁场“指纹”被记录和存储以供以后在认证过程中验证,希望减少每个单独puf部件的磁场测量时间,并且还减少连续测量之间的时间,以便增加总测量吞吐量。本发明提供了一种方式,当使用诸如图18-图20中所示的单片磁传感器阵列器件时,提高连续进行的多个磁场测量的吞吐量。
[0100]
在多个多轴磁传感器按行列布置的单片磁阵列器件中,减少磁场测量时间的方法是对阵列中的多于一个传感器同时进行磁场测量。传感器的一个或更多个轴可以使用并行读出通道同时读出,传感器中每个传感器位于一个或更多个列和/或位于一个或更多个行中。每一个磁传感器都有有限的测量时间,所以一次测量阵列中的每一个传感器意味着总的测量时间由每个传感器的测量时间乘以传感器的数量来确定。通过同时测量一个或更多个轴的传感器,总测量时间与同时测量的轴数乘以同时测量的列数乘以同时测量的行数的积成比例地减少,每个传感器位于一个或更多个列中和/或位于一个或更多个行中。
[0101]
在半导体器件上放置并行结构的能力使得能够对完成同时测量所需要的特征进行复制。这不仅包括磁传感器,还包括将磁传感器模拟输出电压转换为数字值所需的读出通道,该读出通道包括放大、降噪、温度补偿和模数转换。这在图18和图21中示出,在图18和图21中,并行读出一行多列中的一轴传感器,并且可以扩展为并行读出一行多列中的多轴传感器,并且可以进一步扩展为并行读出多行多列中的多轴传感器。
[0102]
在图21的示例中,单片磁传感器阵列器件2102包括由192行
×
192列3轴传感器2111组成的磁传感器阵列2101,例如,总共110592个传感器。如果该器件构造为仅具有一个串行读出通道,那么总测量时间(每个传感器10毫秒)将为1105.9秒。如果该器件构造为对于在一行中每一列的一个轴上具有并行读出通道,那么总测量时间将减少到其除以192,从而总测量时间为5.8秒。此外,如果该器件被构造为对于一行中的每一列的每一轴具有并行读出通道,则总测量时间将减少到其除以576(192乘以3),从而总测量时间为1.9秒。最后,如果该器件被构造为对于四行中的每一列的每一轴具有并行读出通道,那么总测量时间将减少到其除以2304(192乘以3乘以4),从而总测量时间为480毫秒。
[0103]
使用单片磁传感器阵列器件来减少多个puf部件的连续磁场测量之间的时间的方法是将来自第一磁场测量的测量数据到主计算机的全部或部分传输与进行第二磁场测量的全部或部分重叠。测量过程的全部或部分与传输过程的全部或部分的重叠使得能够在用于第一测量的数据被全部或部分传输之前进行第二测量的全部或部分,从而增加了测量吞吐量。
[0104]
通过在磁传感器阵列器件中包括存储器缓冲器来提供实现这一点的方式,存储器缓冲器可以在第二测量的全部或部分正在进行的同时,暂时存储来自第一测量的测量数据的全部或部分。在第二测量的全部或部分正在进行中时,将来自第一测量的测量数据的全部或部分从存储器缓冲器发送到主计算机。存储器缓冲器可以适当地调整大小,以便传输到主计算机的时间与进行测量的时间密切匹配。这种优化使得数据从存储器缓冲器到主计算机的传输的完成时间能够与第二次测量的完成时间大致相同。在这一点上,来自第二测量的测量数据被存储在存储器缓冲器中,并且第三测量与第二测量数据被发送到主计算机
同时开始。这个过程一直持续到所有的磁场测量完成为止。
[0105]
图21提供了这一过程的图示。在该示例中,磁传感器阵列器件2102由磁传感器2111的192
×
192阵列2101以及数字控制器测量和读出器件2191组成,磁传感器阵列器件2102测量第一puf部件(puf部件未示出,参见图22)表面上的磁场,并且将结果存储在片上存储器(sram)2121中,随后该结果从片上存储器(sram)2121通过高速数字接口2131(例如,i2c或spi)发送到主计算机2141。读出通道包括带噪声消除和补偿的放大2151、16位模数控制器(每列一个)2161、192
×
16列捕获寄存器2171和列多路复用器(192
×
16到1
×
16)2181。然后测量第二puf部件并将其存储在片上存储器中,同时将来自第一puf部件的测量值传送到主计算机。片上存储器的大小经过适当调整,以优化增加吞吐量的提高。磁传感器阵列器件2102的每个部分的尺寸仅仅是说明性的,并且可以使用其他尺寸和组织。
[0106]
改进感测距离
[0107]
前面描述的方法提供了一种构造磁传感器阵列的方式,该磁传感器阵列能够在puf部件表面上的x维和y维上具有更高的空间分辨率。本发明的另一个好处是能够减小z维感测距离,该z维感测距离是从传感器阵列到puf部件表面的距离。减小这个感测距离的好处是,它具有放大被感测的磁场信号的效果,因为磁场强度与到传感器的距离的立方成反比。这对于预期由尺寸位于预期范围的下端(最小直径25μm,而平均直径50-500μm)的磁化粒子产生的低幅度磁场信号非常重要。
[0108]
减小磁传感器阵列与产生磁场的puf部件表面距离的方法是:构造集成电路,其中磁传感器阵列内置到半导体晶圆的衬底中大约10μm深度。半导体晶圆在加工后通常为750μm厚,但通常在晶圆被锯切成单独晶粒并将单独晶粒组装到集成电路封装之前,通过“背磨(back-grind)”(到低至50μm的厚度)来使晶圆薄化。用磁传感器阵列构建的晶圆在处理后进行背磨,并组装到诸如晶圆级封装(但不限于此)的集成封装中,可以使得从磁传感器阵列到puf部件的距离小于200μm。
[0109]
图22提供了使用刚才描述的方法减小磁传感器阵列的距离的构造过程的图示。图22a示出了在半导体晶圆2201a被薄化之前构造在该晶圆中的磁传感器阵列。x轴和y轴传感器形成在通过2211扩散到p型体硅衬底2231和2241中的深n型注入物(implant)2221中,并且z轴传感器形成在仅扩散到p型体硅衬底2231和2241中的浅n型注入物2211中。2231和2241之间的虚线表示p型体硅衬底中的分界线,其中磨削工艺将用于去除部分2241。传感器构造仅仅是说明性的,因为有许多方法使用半导体技术提供的材料和结构来构造磁传感器。图22b示出了在使用背磨工艺将晶圆2201b薄化之后的相同磁传感器阵列。通过背磨薄化体硅衬底减小了阵列中所有传感器到硅晶圆底部的距离,其中puf位于硅晶圆底部进行感测。在晶圆被背磨之后,半导体晶圆被锯切成单独磁传感器阵列晶粒,并且每个磁传感器阵列晶粒(示为2
×
2磁传感器阵列)被封装在封装剂2293中,产生如图22c所示的集成电路封装2200。如果晶粒封装在诸如晶圆级封装的倒装芯片封装中,则磁传感器的所有轴将非常接近(远小于非倒装芯片封装的典型500μm)集成电路封装表面。结果是,从磁传感器的所有轴到puf部件2291的感测距离将被最小化,puf部件2291产生从左侧粒子2290示出的磁场2292,这将具有放大由嵌入puf部件2291中的非常小的粒子产生的磁场信号的效果。图22c的向上箭头指示包含粒子2290和其他粒子的puf部件2291被移动,直到2291被读取之前接触传感器封装剂2293或另一保护剂层(如果需要的话)。所示的场线(field line)2292和其
他场线表示粒子2290的场线。其他粒子将具有它们自己的场线,传感器阵列2200将感测每个霍尔传感器表面上所有磁场的叠加。
[0110]
移动误差改进
[0111]
本发明的另一好处是一种使传感器阵列相对于puf部件的测量期间的任何移动对测量结果的影响最小化的方式。在puf读取器系统中,其中puf部件和磁传感器阵列器件相对于彼此静止,消除了移动对测量的影响的大部分。这意味着在二维磁传感器阵列上的磁场测量可以顺序地(在一段时间内)进行,从第一行传感器开始,逐行(或逐行的组)进行,直到到达最后一行传感器,而没有任何移动引起的测量误差。
[0112]
然而,如果在这样的测量过程中,磁传感器阵列相对于puf部件有任何移动,它可能以多种方式使测量结果畸变,诸如重复测量puf部件的一部分或由于磁传感器阵列到puf部件的距离变化而导致的不准确测量。这可能使得测量puf部件表面上的磁场对便携式或手持式读取器设备产生问题,因为便携式或手持式读取器设备不强制puf部件和读取器设备之间的精确三维对准并且意外移动可能产生测量误差。
[0113]
使磁传感器阵列相对于puf部件的移动引起的磁场测量中的任何误差最小化的方法是为阵列中的每个磁传感器包括采样和保持电路。采样和保持电路使得阵列中的多个传感器能够在大致相同的时间被测量,并且对于每个传感器的测量结果被临时存储,从而使移动的任何影响被最小化。集成在磁传感器阵列器件中的控制电路提供触发信号以使阵列中的多个传感器启动测量并将结果传送到磁传感器内的临时存储位置(诸如存储在电容器中的电压)。由于存储了同时测量的多个磁传感器的磁场测量值,所以由于移动引起的任何磁场测量误差的影响被最小化。
[0114]
图23提供了采样和保持电路的图示,该采样和保持电路集成到磁传感器的每个轴中,并为二维阵列中的每个磁传感器复制。多轴磁传感器1101、1102和1103(类似于图10或图11中所示的那些)由电压源2321和地2301供电。磁传感器通过公共行选择线2311和沿着垂直列访问线2331a、2332a、2333a、2331b、2332b和2333b访问。采样和保持电路2341提供与磁传感器的每个轴的磁场测量相关联的电压的临时存储,直到模拟多路复用器2351a、2351b将存储在采样和保持电路2341中的电压连接到读出通道(放大、补偿、数字化)2361并传送到片上存储器,然后随后传送到主计算机(未示出)。
[0115]
温度测量的改进
[0116]
本发明另外的好处包括一种更准确地补偿温度对用磁传感器阵列器件进行的磁场测量的畸变的影响的方式。大多数采用半导体技术(诸如霍尔效应技术或磁阻技术)构造的磁传感器必须补偿温度对由传感器产生的磁场测量的非线性影响。这些传感器通常将磁传感器和温度传感器(也称为热二极管)两者彼此并排集成在同一半导体晶粒上,以便同时测量磁场和温度两者。然后,可以(由集成到传感器设备中的硬件或在主计算机上运行的软件)使用温度测量来补偿由磁传感器使用算法进行的磁场测量中的任何误差,该算法具有由磁传感器在器件的制造工艺、工作电压和工作温度的变化中的特征性能确定的参数。
[0117]
在半导体器件中,由于电路活动(例如,晶体管开关)从一个位置到另一个位置的变化,温度在半导体晶粒的整个区域上变化是正常的。电路活动的这种变化导致晶粒上的一些位置处于较高的温度,那里存在较高的电路活动,而晶粒上的一些位置处于较低的温度,那里存在较低的电路活动。在具有单个磁传感器和单个温度传感器的器件中,这两个传
感器可以彼此紧密地并排隔开,因此几乎不存在由两个传感器位置处的电路活动的差异引起的温度变化。这意味着在温度传感器位置处的温度是在磁传感器位置处的温度的精确表示,然而对于使用单个温度传感器的磁传感器阵列器件来说,情况并非如此,因为从阵列中的每个磁传感器到单个温度传感器的距离将不同,它可能由于在相应位置处的电路活动的变化而导致温度测量中的误差。
[0118]
在具有大磁传感器阵列的器件中避免温度测量误差的方法是在器件中集成多个温度传感器,以减小每个磁传感器到其相应温度传感器的距离。理想情况下,阵列中的每个磁传感器都有一个温度传感器,然而,这可能会对半导体晶粒的尺寸产生不利影响,并过度增加成本。替代方案是将阵列中的磁传感器布置成多个部分,其中每个部分在水平和垂直方向上包含相等数量的磁传感器,以及在每个部分的拐角处放置一个温度传感器。
[0119]
这种布置减小了从阵列中的每个磁传感器到其相关温度传感器的距离和温度变化,并产生了更准确的温度测量值,该温度测量值可由硬件或软件使用以针对温度来补偿磁场测量。每个磁传感器的温度可以通过任何合适的算法计算,诸如将来自其部分的拐角处的四个温度传感器的温度测量值进行平均,或者简单地使用最近的温度传感器的温度测量值。
[0120]
图24a通过将磁传感器阵列划分为四个部分2401a、2401b、2401c和2401d来提供对此的图示,其中两个部分水平布置,并且两个部分垂直布置,其中温度传感器2411放置在每个部分的拐角处,共有九个温度传感器用于整个阵列。这一概念可以扩展,如图24b示,通过将磁传感器阵列分成16个部分,其中四个部分水平布置,例如在第一行的2421a、2421b、2421c和2421d,并且四个部分垂直布置,其中每个部分的拐角处放置温度传感器2411,共有25个温度传感器用于整个阵列。这种将阵列分为部分——其中每个部分的拐角处放置温度传感器——的划分只要有消除任何温度测量误差的需要就可以继续进行,该温度测量误差是由于磁传感器位置与温度传感器位置之间的电路活动差异而产生。
[0121]
良率(yield)损失改善
[0122]
本发明的另一个好处是这里公开的方法用以使良率损失对磁传感器阵列器件的成本的影响最小化。一般来说,对于半导体晶圆制造工艺,其良率损失与工艺每单位面积的特征缺陷密度成正比。这些缺陷是由材料中的缺陷和穿过过滤系统的诸如灰尘的粒子污染造成的,过滤系统提供创建半导体器件中存在的非常小的结构所必需的洁净室环境。半导体器件的成本与器件的面积和制造良率成正比,因此希望减小器件的尺寸并提高制造良率以降低成本。对于小型磁传感器阵列器件,期望的良率损失最小,但当磁传感器阵列尺寸变大时(例如,传感器的数量/行是2的n次方,其中n=2、3、4、5、6、7、8并且传感器的数量/列是2的n次方,其中n=2、3、4、5、6、7、8),最小化传感器缺陷对良率损失的影响的方法的好处对于器件成本最小化是非常重要的。
[0123]
集成了非常密集的规则结构的半导体器件(如使用存储器单元阵列的存储器件)对晶圆制造过程中由于缺陷引起的良率损失更加敏感。为了补偿由非常密集的规则结构放大的令人望而却步的良率损失,这些器件通常在一些所需的规则结构旁边实施冗余结构。当半导体晶圆被测试时,如果规则结构(如存储器单元)被确定为有缺陷,则测试程序可以在器件中(例如,在电子熔断器中)存储一些参数,这些参数指示器件永久地用功能冗余结构代替有缺陷的规则结构。
[0124]
用这些冗余结构代替任何有缺陷的结构,使得原本会被丢弃的器件现在能够发挥作用,这增加了良率,降低了成本。磁传感器阵列器件还集成了以磁传感器单元形式的非常密集的规则结构,该磁传感器单元在晶圆的任意大的表面积上组合成非常密集的二维阵列,因此它们也受到令人望而却步的良率损失,并且必须找到一种方法来最小化这种影响。在存储器件中,冗余结构的位置相对于该冗余结构正在替换的有缺陷的规则结构的位置没有依赖性,但对于用于测量二维区域上的磁场的磁传感器阵列器件来说,情况并非如此,因此必须设计替代的方式以最小化良率损失对器件成本的影响。
[0125]
使磁传感器阵列器件的成本不那么容易受到预期良率损失的影响的方法是:创建非功能性磁传感器的图(map),该图在制造时存储在器件中或外部存储器中。然后,在磁场测量期间,由磁传感器阵列器件(或软件算法)使用非功能性传感器的图,以使用诸如平均或任何类似算法的插值算法从相邻功能性传感器得到的插值结果来代替非功能性传感器的磁场测量值。替代地,非功能性传感器的图可以指示验证算法丢弃来自磁传感器阵列的非功能部分的磁场测量值,并且不将该磁场测量值用作验证算法的一部分。
[0126]
在将晶圆锯切成单独的晶粒之前,在通常称为“晶圆探测”的测试过程中,对半导体晶圆进行测试。该测试是在好的晶粒从晶圆上锯切并组装到集成电路封装中而坏的晶粒被丢弃之前用来识别好的晶粒和坏的晶粒的一种手段。通过将非易失性存储器(例如eeprom)集成到磁传感器阵列器件中,可以在晶圆探测测试时将非功能性传感器的位置存储在器件中,以供磁场读取器设备或验证算法稍后使用。类似地,在“晶圆探测”测试时,可以将器件外部的非功能性传感器的图存储在外部数据库(或外部存储器)中,在那里它们可以稍后由软件算法访问,以对前面描述的非功能性传感器进行测量补偿。
[0127]
通过表征puf验证算法在所有可能有缺陷的传感器位置上具有的容差,可以由晶圆探测测试建立通过/失败准则(诸如,器件中不超过5%的非功能性传感器定位在不靠近每一其他传感器位置的位置)并且使用该通过/失败准则,以允许一部分磁传感器阵列器件被认为是功能的,即使它们包含一些非功能性传感器。这提供了一种降低磁传感器阵列器件的成本的方式,而不会明显地影响对正品和非正品puf部件的验证的磁场测量。
[0128]
图25提供了分布在磁传感器阵列上的非功能性磁传感器2501a-m的一部分的图示。在该示例中,例如,在256个传感器的16
×
16阵列中,有12个非功能性传感器和244个功能性传感器2511。用于该示例的通过/失败准则是非功能性传感器定位成相隔不超过一行或一列,例如,由区域2521所示,对于非功能性传感器2501a,总良率损失不超过5%。利用该准则,可以将磁传感器器件视为功能性器件,而不是非功能性器件,并且提高了半导体工艺良率,还降低了每个磁传感器阵列器件的成本。这里还示出了一种潜在的测量插值算法,其中每个非功能性传感器的测量值由8个最近的功能性传感器2531a-h(例如,在周围的框2521中所示)的平均值代替。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1