柔顺的三轴力传感器及制造其的方法与流程
1.本发明涉及一种柔顺的三轴力传感器以及制造这种传感器的方法。
背景技术:
2.为了让机器人和机器能够以类似于人类的方式与其周围的世界互动,它们还必须具有类似于人类的高度敏感的触觉。机器人最难模仿的区域之一是手掌,因为它是人体神经受体密度最高的区域之一。此外,皮肤具有多个机械感受器,用于感应不同的力/压力以及振动频率。对于机器人处理精密对象的能力来说,压力的静态感测是最重要的。为此,已经制造了多种触觉传感器来提供压力数据。
3.目前市场上的大多数传感器包括单力传感器或其他传感器。这些仅对被视为相对大的表面区域上的压力提供标量值。其他提供更高级触觉信息的传感器包括坚固但需要更换整个机器人手指的传感器。
4.然而力是具有两个分量(大小和方向)的向量。多年来,方向信息/数据是改善机器人技术的重要因素。能够确定大小和方向的传感器通常被称为三轴力传感器。这些力-力矩(f/t)传感器主要用作机器人末端执行器臂的一部分(见本说明书末尾列出的参考文件1),或最近用于测量机器人指尖上的力的方向分量(见本说明书末尾列出的参考文件2)。历史上,已经多次尝试制造这种传感器,最近的一些传感器已经实现了相对较高的密度,但它们是使用固态材料和/或微机械技术制造的。不仅力读数对给定表面周围的弯曲比较敏感,而且其中许多不能弯曲,只能被集成到机器人硬件中。最近,人类和机器人监测都已经意识到了对柔顺的触觉系统的需求。许多柔顺的/贴合的压力传感系统可被归类为电子皮肤(e-skin)类型。
5.已经制造了一些能够提供多点或高密度触觉信息(见本说明书末尾列出的参考文件3和4)的最新的电子皮肤和数据手套,然而大多数不能提供对测量一些现象至关重要的方向信息。它能够让机器人抓取物体,在诸如地球的重力环境中检测物体质量,还能够例如在其他物理现象中测量鞋垫中的地面反作用力用于步态分析。
6.近来许多人试图制造完全柔顺的三轴力传感器。为此已经采用了各种深奥的方法,包括使用诸如egain(共晶镓铟)的液态金属(见本说明书末尾列出的参考文件5)的各种柔顺的应变仪设计,其中一些设计类似于花环应变仪(它们难以制造并可能导致有毒泄漏),还有一些是基于笨重的气动室的传感器,以及自调整碳纳米管(cnt)阵列。
7.当需要以高密度集成这些传感系统中的任意系统时,矩阵阵列是必要的,因为它减少了布线考虑,从而减少了它们在电子皮肤上占用的空间。虽然这在很大程度上是通过电容式感测实现的,无论是使用金属、导电液体还是其他材料(见本说明书末尾列出的参考文件6、7和8),由于表面和传感器可能发生电容耦合,这种类型的感测对其所用的基底(例如,人类皮肤、金属机器人)敏感。此外,电容式感测需要复杂的读数电子设备,并且易受背景电磁(em)噪声的影响,这使得它在许多应用中不切实际。还使用了其他方法,但都有某些缺点;具有致动和检测的潜在能力(见本说明书末尾列出的参考文件10)的压电感测(见本
说明书末尾列出的参考文件9)易受显著的背景电磁兼容性(emc)噪声的影响且不能执行静态感测;磁感测(包括霍尔效应和感应方法)(见本说明书末尾列出的参考文件11至14)也受背景emc和周围磁场的影响,其中一些可能由机器人自身的致动器产生。
8.此外,最重要的是使电子皮肤尽可能薄,使其不干扰它要被改装到的设备,同时还具有紧凑型电子读数系统,这是大多数解决方案/系统所缺乏的。近来开发了非常有前途但成本较高的制造工艺,利用自调整碳纳米管阵列来读数制造工艺期间在侧壁上生成的集成阵列中的三轴信息,具有良好的循环重复性(见本说明书末尾列出的参考文件15)。
9.之前已经使用过量子隧穿材料以及压阻复合材料,但所提出的系统都不是高度可集成或可包装的。通常,柔性布线不够灵活或柔顺,这是由于材料太硬或仅在1轴上柔顺,或者层不够薄。这种设备的结构通常包括放置将力转化为力矩的“凸起”,其直接放置在4个正交排列的压力传感器或压力感测像素(传感器元件,sensel)上方。当柱顶端受到来自给定方向的力时,这会转化为向下的力和侧向力矩。因此,4个压力传感器承受不同的力/压力。然后对这些传感器中的每个上的电阻变化量的测量可用于将力分解为其三维笛卡尔分量(f
x
、fy和fz)。各种电极配置可用于从压阻材料中读数信号(见本说明书末尾列出的参考文件16)。
10.迄今为止,最接近制作压阻式三轴传感器阵列的材料包括侧壁嵌入聚二甲基硅氧烷(pdms)中的互锁结构以及微金字塔阵列结构(见本说明书末尾列出的参考文件17)。前者的优点是能够部署在相对密集的3
×
3阵列中,然而只能在0-225pa的极低负载下工作。后者的优点是具有从128pa到44kpa的宽动态范围。然而,它需要大量布线,因为它不适合被部署为矩阵,同时还具有几毫米厚的整体结构,这意味着它不能缠绕在表面上,并且由于其复杂性,大规模生产将非常困难。
11.量子隧道复合材料由david lussey于1996年发现。它们是基本上由金属颗粒以及非导电弹性体粘合剂或基质组成的复合材料。这些材料对电流有很高的电阻,在没有施加压力的情况下基本上是绝缘体。一旦施加压力,它们的电阻呈指数下降,这可以使用正确的电路来测量。其原因是金属颗粒以特定的浓度分散在材料中,但彼此之间没有物理接触。在施加压力之后,金属颗粒彼此接近,尽管不能彼此接触,但电子开始能够通过称为量子隧道的现象而从一个颗粒跳到另一个颗粒。压力越高,颗粒与另一颗粒越近,这反过来会增强这种隧道效应并降低材料的电阻。为了使其工作良好,颗粒在粘合剂内的良好分散以及它们的小尺寸是必要的,这是因为隧道效应仅在小尺度上有效。出于该原因,颗粒通常为微米或纳米大小,并由通常为诸如银、金或磁铁的金属的导电材料构成。它们通常也被纳米图案化,例如“尖形”纳米颗粒比圆形纳米颗粒表现出更好的隧道行为,这是由于即使颗粒彼此间的距离更大,微观尖峰的尖端也增强隧道电流。这提高了灵敏度和整体性能。
12.peratech提供的药丸曾用于尝试制造三轴传感器,但这些装置存在小型化和诸如传感器滞后的其他问题。药丸缺乏在大规模生产过程期间被集成的能力,并且厚度和最小直径都很大,导致它们笨重且不特别敏感。
13.综上所述,市场上的商用柔性力传感器仅能给出力的标量值,而不能给出其方向或剪切力。它们不能承受显著的弯曲同时还会在弯曲期间改变其值。此外,需要包括三轴技术的阵列技术来获得必要的数据以实现多种先进应用。这在需要测量地面反作用力的例如
人类和机器人的步态分析、机器人以复杂方式操纵物体、机器人操纵精密物体而不损坏它们、利用可穿戴服装监测诸如人体上的肌肉活动和血液流动的生理力、感测诸如潮汐顶部和风力涡轮机上的空气或水的流体的流动现象、允许外科医生用外科机器人等“触诊”组织时尤为重要。
14.(在研究实验室中)能够使用诸如压阻(例如使用应变仪或纳米复合材料);电容;压电;电感;光学或磁性的多种传导机制形成柔顺的三轴传感器。压阻和电容传感器因其优异的性能而占据主导地位。然而,电容传感器对它们所放置的基底敏感(由于与该表面电容耦合),并且需要更复杂的读数电子设备(这是由于空间要求和实施复杂性造成的障碍)。其他传感器的缺点包括:压电传感器无法感测静态接触力,这是因为材料中的感应电荷很快消散;大多数这种传感器对温度敏感,通常不坚固;缺乏动态力感测范围;对emc噪音敏感(尤其是在磁性和压电传感器中);有些压电传感器是光敏的。此外,大多数已知的制造这些传感器的工艺本身产量低、不一致且不可扩展。通常,用此类传感器进行的测量不可重复,导致传感器不可靠。
15.在所有可用的传感器中,没有一个足够坚固以能够在现实设定中以理想的方式执行功能。工业中迫切需要由能够承受数千到数百万次循环的耐用材料制成的坚固的传感器,其对温度和恶劣环境条件不敏感,并且能够执行三轴力感测。传感器还必须非常薄,使得在不干扰其功能的情况下添加到现有装置中,并且传感器的工作对弯曲不敏感,从而它还可在诸如柔软的机器人或人类皮肤的柔软表面上执行功能。
16.因此,本发明的目的在于提供一种柔顺的三轴力传感器和制造这种传感器的方法,其至少解决以上讨论的当前技术使用中存在问题的至少一些问题。
技术实现要素:
17.在本发明的第一方面中,提供了一种柔顺的三轴力传感器,包括:
18.第一电极层,具有处于第一取向的列电极的阵列;
19.第二电极层,具有处于与所述第一取向正交的第二取向的列电极的阵列;
20.依赖力的活性层,被配置成在受到力时改变至少一个特性并且被设置在所述第一电极层与所述第二电极层之间;
21.至少一个三维凸起,被布置成将外部施加的力传递通过所述活性层;并且
22.其中,设置有至少一个间隔件,所述至少一个间隔件被布置成保持传感器中的两层或更多层之间的分离,直到外力被施加。因此,本发明的实施例包括柔顺的三轴力传感器,其可由薄的材料层制成以允许其完全柔顺和灵活,但其包括一个或多个间隔件,以保持特定层之间的间距,使得传感器的弯曲本身不会导致错误的力读数,并且因此传感器可以是坚固的、可靠的和可重复的。因此,传感器可承受数千到数百万次循环而不会发生故障,因此可在工业环境中有效运行。一致的输出还消除了单独校准每个感测元件可能需要的大量时间。这在每个tactel(触觉元件),即凸起,使用4个sensel(传感器元件)的一些实施例中尤其有用。此外,传感器对背景噪声的敏感度较低,并且可根据应用(即,通过增加或减少活性层的厚度)容易地配置不同的力感测范围。
23.有利的是,传感器可被配置为薄的、可拉伸的、贴合的、基于纳米复合材料的触觉装置,其可测量三个不同的轴(x、y和z)上的力。本发明的实施例可以是足够柔顺的,以被缠
绕在非常小的弯曲半径或软机器人周围,但对信号完整性或响应的影响最小,允许准确地测量力的大小以及方向。因此,传感器性能对弯曲不敏感。柔性的连接和电气布线通过层和电极结构被集成到传感器中,并且传感器在顶部具有将力转化为力矩的“凸起”层。此外,该传感器适合于使用多种现有的简易批量生产工艺中的任一种进行大规模生产,例如使用可定制材料进行丝网印刷和卷对卷印刷同时保持高产量。因此,它可部署在大规模阵列中,诸如电子皮肤应用可能需要这样的阵列。目前,还没有这种类型的通用电子皮肤。传感器可高度集成到不同的装置、产品或服装中,并可重新安装到硬的、软的和可拉伸的表面上。此外,还可采用环保材料。
24.每层均可被印刷(例如,通过丝网印刷或喷墨印刷),使其高度微型化(至少达到机器人末端执行器所需的理想的1mm
×
1mm的三轴像素密度)。在一些实施例中,第一电极层和/或第二电极层可由沉积在下面的层上的导电墨形成。
25.上述所有优点使得本发明的实施例能够提供一种商业上可行的传感器,适用于受控实验室环境或学术界之外的“现实世界”的工业应用。
26.活性层包括量子隧道材料、压阻材料或压电材料中的至少一种。因此,当活性层受到力时,所述可改变的至少一个特性是这些方面的量:量子隧道;导电性;电阻率或电荷。因此,本发明的实施例可采用复合材料,该复合材料利用量子隧道传导机制或压阻传导机制将施加的力转换为感测信号。由于材料的特性,活性层是便利的各向异性,使得当沉积在薄的层中时,它对法向力的反应更具选择性。
27.所述至少一个三维凸起可具有覆盖区,其至少部分地在第一电极层中的至少两个列电极上延伸并至少部分地在第二电极层中的至少两个列电极上延伸,使得施加到凸起的力能够在至少四个离散区域中传递通过活性层。以这种方式,每个tactel(触觉元件)连接到4个sensel(传感器元件)或像素,每个sensel上的力的强度可用于确定所施加力的大小和方向(即,产生剪切力和压缩力的组合)。
28.在其他实施例中,该至少一个三维凸起具有被包含在第一电极层中的两个列电极之间和第二电极层中的两个列电极之间的空间内的覆盖区。在这种情况下,可采用一个或多个间隔件将施加在凸起上的力重新分配到4个sensel(传感器元件)中的每个。
29.活性层可包括第一活性层和第二活性层,第一活性层与第二活性层之间有间隙。
30.传感器还可包括下面的一个或多个:第一电极层下方的基层、第二电极层上方的顶层、第一电极层与活性层之间的第一碳层、第二电极层与活性层之间的第二碳层以及至少一个三维凸起上的覆盖层。
31.第一碳层和/或第二碳层可在第一电极层和/或第二电极层中的多个列电极上是连续的。
32.至少一个间隔件可提供在活性层内;基层与顶层之间;或者在第一电极层或第二电极层上或通过第一电极层或第二电极层。
33.至少一个间隔件可呈点、柱、杆、圆柱体、管状体、棱锥体或网格的形式。
34.至少一个间隔件可具有圆形、正方形、长方形、菱形、五边形、六边形或蜂窝晶格形式的实心或中空的横截面。
35.传感器可包括所述间隔件的阵列。所述阵列中的间隔件可具有多个不同的尺寸。
36.活性层可在第一电极层和/或第二电极层中的多个列电极上形成连续层。
37.活性层可在第一电极层和/或第二电极层中的柱电极上形成不连续的层。
38.传感器可包括第一电极层和/或第二电极层中的相邻电极之间的绝缘件。
39.至少一个间隔件可采用被提供在活性层与第一电极层和/或第二电极层之间的粘合剂的形式,其中粘合剂被提供在相邻的柱电极之间的间隙中并在活性层与所述相邻的柱电极的各自的边缘之间延伸。
40.传感器可包括提供在一个或多个相邻的层之间的粘合层。
41.至少一个三维凸起可包括聚合物,所述聚合物具有与传感器的其余部分不同的弹性。
42.至少一个三维凸起可呈平台、圆顶、半球、半球形段、圆锥、圆锥段、长方体、圆柱体、半圆柱体、棱锥、棱锥段、四面体、四面体段、六面体、三棱柱或多面体的形式。
43.至少一个三维凸起的高度可以是传感器的其余部分的高度的至少两倍。在一些实施例中,凸起可显著高于传感器的其余部分(例如,高度高达3mm),以将剪切力转化为足够高的力矩,进而用不同的压力压缩下面的活性层材料。在一些实施例中,活性层可在电极之间具有1mm的宽度,每个tactel可由矩阵阵列中的4个像素组成,每个像素的间距为2mm,使得感测面积为3mm
×
3mm=9mm2。然而,使用更敏感的活性层,可获得更好的分辨率。触觉元件和传感器元件之间的间距可非常小,以提高分辨率(例如,500μm或以下),只要它们不接触,并且它们之间不会发生隧道效应。以这种方式分离电极有助于减少传感器中的串扰。
44.传感器可包括所述三维凸起的阵列。
45.根据本发明的第二方面,提供了一种制造根据上述第一方面的传感器的方法,包括:
46.提供具有处于第一取向的列电极阵列的第一电极层;
47.提供具有处于与第一取向正交的第二取向的列电极阵列的第二电极层;
48.提供与力相关的活性层,活性层被配置成在受到力时改变至少一个特性并且被提供在第一电极层与第二电极层之间;
49.提供被布置成将外部施加的力传递通过活性层的至少一个三维凸起;和
50.提供至少一个间隔件,所述至少一个间隔件被布置成保持传感器中的两层或更多层之间的分离,直到外力被施加。
51.因此,本发明的这方面的实施例提供了一种制造传感器的方法,其可使用各种现有技术容易地批量生产。
52.每层、凸起或间隔件可通过印刷、丝网印刷、卷对卷印刷、喷墨印刷、3d印刷、静电纺丝、沉积、液滴分配、铸造、涂覆、模制、纺丝或编织中的一个提供。
53.方法可包括在单个基底上形成至少第一电极层和所述第二电极层;将基底分离成两部分;把这两部分堆叠在一起。
54.方法可包括在所述分离和/或堆叠之前在至少一个部分上形成至少一个间隔件。
附图说明
55.现在将参考以下附图,仅出于示例的目的描述本发明的非限制性实施例,其中:
56.图1a示出了根据本发明的第一实施例的包括圆顶形状凸起的柔顺的三轴力传感器的俯视透视图;
57.图1b示出了图1a的传感器的侧视图;
58.图1c示出了图1a的传感器的平面视图;
59.图2a示出了根据本发明的第二实施例的包括立方体形状凸起的柔顺的三轴力传感器的俯视透视图;
60.图2b示出了图2a的传感器的侧视图;
61.图2c示出了图2a的传感器的平面视图;
62.图3a示出了根据本发明的第三实施例的包括圆柱形状凸起的柔顺的三轴力传感器的俯视透视图;
63.图3b示出了图3a的传感器的侧视图;
64.图3c示出了图3a的传感器的平面视图;
65.图4是根据本发明的实施例的制造传感器的方法的流程图;
66.图5a至图5i例示根据本发明的另一实施例的制造传感器的方法的步骤;
67.图6a至图6i例示根据本发明的又一实施例的制造传感器的方法的步骤;
68.图7a至图7g例示根据本发明的再一实施例的制造传感器的方法的步骤;
69.图8a和图8b示出根据本发明的实施例的包括不同的圆柱形支撑柱构造的传感器的一部分的平面视图;
70.图9a和图9b示出根据本发明的实施例的包括不同的菱形支撑柱构造的传感器的一部分的平面视图;
71.图10a和图10b示出根据本发明的实施例的包括不同的正方形支撑柱构造的传感器的一部分的平面视图;
72.图11a、图11b和图11c示出根据本发明的实施例的包括不同的六边形支撑柱构造的传感器的一部分的平面视图;和
73.图12a示出根据本发明的实施例的传感器的单个触觉元件(tactel)的俯视透视图;
74.图12b示出图12a的触觉元件在施加斜向力之前和之后的侧面透视图以及对应的力与时间的曲线图;以及
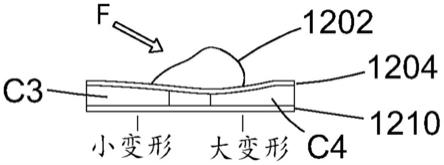
75.图12c示出图12b的触觉元件在施加斜向力时的侧视图。
具体实施方式
76.根据图1a、图1b和图1c,示出根据本发明的第一实施例的包括四个三维圆顶形状凸起102的柔顺的三轴力传感器100。传感器100包括呈底膜封装层形式的基层104;第一(底部)电极层106,具有处于第一取向的列电极106a的阵列;第二(顶部)电极层108,具有处于与第一取向正交的第二取向的列电极108a的阵列;呈量子隧道材料层形式的与力相关的活性层110,其被配置为在受到力时改变至少一个特性并且设置在第一电极层106和第二电极层104之间;以及呈顶膜封装层形式的顶层112。圆顶形状凸起102设置在顶层上,并被布置成将外部施加的力传递通过活性层110。虽然在图1a、图1b和图1c中未示出,但设置了至少一个间隔件,其被布置成保持传感器100中的两层或更多层之间的分离直到外力被施加为止。下面将结合图4至图11c对间隔件进行更详细的描述。
77.如图1a和图1b所示,可选的绝缘件114阵列设置在第一电极层106中的柱电极106a
之间。类似的绝缘件116阵列设置在第二电极层108中的柱电极108a之间。每个凸起102具有圆形基座102a和延伸到平坦顶部102c的弯曲侧壁102b。
78.在该实施例中,基层104、第一电极层106、活性层110、第二电极层108和顶层112中的每个都是0.10mm厚而形成了0.50mm厚的传感器主体。此外,每个柱电极106a、108a为1mm宽,并且每个凸起102的高度为1mm并具有3mm的最大直径。每个相邻凸起102之间有1mm的间隙。在其他实施例中,可使用其他尺寸来适合特定应用。然而,可设想传感器主体通常由相对较薄的层构成,以允许传感器柔顺并能够应用于弯曲或其他形状的表面。如这里所示,在一些实施例中,凸起102可显著高于传感器主体,以将剪切力转化为足够高的力矩,这转而以不同的压力压缩下面的活性层110。
79.如图1c所示,每个三维圆顶形状的凸起102具有至少部分地在第一电极层106中的至少两个列电极上和第二电极层108中的至少两个列电极上延伸的覆盖区,使得施加到凸起102上的力能够在至少四个离散区域传递通过活性层110。以这种方式,每个凸起102可被认为连接到四个感测元件(sensel)或像素的触觉元件(tactel),并且每个sensel处的力的强度可用来确定所施加的力的位置、大小和方向(即,产生剪切力和压缩力的组合),如下面参考图12a、图12b和图12c进一步解释的。注意,在图1c中,柱电极106a、108a以虚线示出,好象传感器100的层是透明的。
80.尽管传感器100neo被示出具有四个凸起102的阵列,但传感器主体可以延伸,并且可包括用于任何给定应用所需的任意数量的凸起102。
81.在所描述的任何实施例中,传感器可由以下所列材料的任何选择形成。
82.基层104和顶层106可由任何合适的基材形成,并可包括下面的一种或多种:聚乙烯(para-xylelene)聚合物(parylene)、2,8-二氯三环[8.2.2.2
4,7
]十六烷-1(12),4,6,10,13,15-己烯(parylene-c)、聚二甲基硅氧烷(pdms)、聚酰亚胺(pi)、聚丁酸酯己二酸丁酯(polybutyrate)、聚乙烯(methyl methacrylate)(pmma/acrylic)、二环烯酸酯(acrylate)、聚乙烯(pe)、高密度聚乙烯(hdpe)、低密度聚乙烯(ldpe)、聚对苯二甲酸乙二醇酯(pet)、热塑性聚氨酯(tpu)、聚氨酯(pu)、聚硅氧烷(silicone)、聚氯乙烯(pvc)、聚乙烯亚胺(pei),聚萘二甲酸乙二醇酯(pen)、聚丙烯(pp)、聚苯乙烯(ps)、脂肪族或30半芳香族聚酰胺(pi)、聚四氟乙烯(ptfe)、聚偏氟乙烯(pvdf)、无纺布或其混合物。低杨氏模量聚合物可有助于获得更高的一致性,例如杨氏模量高达1.5mpa(兆帕斯卡)、更优选地高达1.2mpa、再优选地高达1mpa且优选地至少500kpa,例如在700kpa至1mpa范围内,例如700至800kpa。这尤其适用于pdms;这些低杨氏模量聚合物的缺点是对于某些应用来说,它们往往太脆弱或耐热性不够。为此,可使用诸如涂覆了tpu的硅酮的混合物。列表中许多更硬的聚合物(例如pen)在25微米厚时具有高的柔性。不同可能的基底的一些示例性厚度为:聚对二甲苯-c,500-10000nm;pen,25-100微米;pet,36-125微米;硅树脂,5-500微米;tpu,50-75微米。
[0083]
第一电极层106和第二电极层108两者的列电极106a、108a可由导电复合材料形成,该导电复合材料包含诸如金属填料颗粒(微米或纳米级)的墨。碳、银、金和铜是最常用的。如果基底不可拉伸或特别薄,或者如果金属在基底被拉伸时具有弯曲度而不是拉伸金属本身,则可使用金属薄膜(例如金/铜)。所有这些都需要具有高导电性,所使用的最好金属是金,这是因为它是所有金属中最具延展性和韧性的。可用于列电极106a、108a的一些示
例材料是工程材料解决方案有限公司(engineered materials solutions,inc.)(ems)的导电墨(ci)(例如,ci-1036,其是在25.4微米厚时具有《0.010ω/面积(square)的薄层电阻率的银导电墨;或ci-2051,其是在25.4微米厚时具有《50ω/面积(square)的薄层电阻率的碳基导电墨)。其他合适的材料包括asahi
tm
墨和金薄膜,其在20摄氏度时具有~2.44
×
10-8
ωm的电阻率。
[0084]
活性层110可包括量子隧道材料、压阻材料或压电材料。由于量子隧道效应,量子隧道材料的电阻将呈指数下降,这导致高达10
12
ω的巨大电阻变化,跨越非常大的动态力范围。在一些实施例中,能被感测到的力范围可低至0.003n至200n,并且如果在传感器中使用更多的刚性材料,则这可被扩展至更高。合适的量子隧道材料的示例是量子隧道复合材料其包括粘合剂材料加上镍或硅(半导体)填料颗粒,其具有高纵横比的尖端(例如圆形、尖形或针状)。由介电材料(诸如二氧化钛或气相二氧化硅颗粒)组成的颗粒也可用于该材料中。具有空隙承载结构的金属或金属合金也可与各种不同的粘合剂一起使用。另一种合适的量子隧道材料是它包含尖形的或针状的磁铁和/或镍颗粒以及聚氨酯粘合剂。颗粒彼此不接触,但电流能够通过量子隧道机制穿过它们。零维、一维或二维纳米颗粒材料由于其增强的动态范围和灵敏度而可能是理想的。对此的部分原因可能是由于其尖端处的局部电场集中增强了量子隧道效应以及所需材料的较低渗流阈值(因此也是数量)。有利的是,量子隧道材料对测量电阻的电极之间的压缩压力最为敏感,这允许例如应变仪不提供的显著的选择性。与许多其他传感器和材料相比,量子隧道材料对温度和环境电磁兼容性噪声的灵敏度也较低。
[0085]
合适的压阻材料包括纳米复合材料和静电纺丝微纤维或纳米纤维。当在压阻材料上施加不同的电压并对材料施加压力时,压阻材料调节电流。这些包括活性填料(微米/纳米颗粒),其可以是碳、碳纳米管(cnt)、多壁碳纳米管(mwcnt)、石墨烯、硼烯、银、量子点或任何其他导电或半导体微米/纳米颗粒。它们还可包含通常在纳米颗粒的表面上执行功能的表面活性剂,以增加分散并减少由于例如范德华力引起的凝聚。还采用粘合剂,例如pdms、硅树脂、四氟乙烯(tfe)、丙烯、pvdf(在其所有状态下都不是压电的)、诸如被包含在基底或混凝土中的这些的其他聚合物。聚合物可以是热固性的(即,由于热、湿气、光或空气而发生永久性交联反应)或非热固性的(即,熔化)。它们还可以是含氟聚合物。压阻材料还可以包含溶剂以控制粘度(例如,在印刷期间),但溶剂通常大部分在空气中或在固化时蒸发掉。纳米颗粒理想地竖直排列(并且分散良好),以增强材料的各向异性行为,从而感测由于材料弯曲和拉伸而在法线方向上产生的压力以及最小的压力读数。压阻材料中的一些颗粒可以电对齐或磁对齐(通过在固化和/或沉积之前和/或期间在材料上施加静态或变化的电场和/或磁场)。例如,这可通过在固化之前改变通过材料的ac(交流电)电场而使用介电泳对齐来实现、通过施加通过材料的dc(直流)电流而使用dc对齐来实现、或者纯粹通过dc电场(其中,在没有电流流经其导电颗粒的情况下在材料中存在静态场)来实现。可进行这种对齐以使压阻材料更具有各向异性或透光性。如果压阻材料中的导电颗粒本身不响应于所施加的场,则它们可利用其他纳米颗粒(例如,铁磁性的氧化铁纳米颗粒)执行功能以被对齐。其他可能合适的压阻材料包括以上列出的纳米复合材料中使用的任何填料的薄膜。
[0086]
合适的压电材料还包括纳米复合材料和静电纺丝微纤维或纳米纤维。这些可包括由于外部应力而表现出电荷分离的活性填料(微米/纳米颗粒),其可包括但不限于氧化锌
(zno)、聚偏氟乙烯(pvdf)、聚乙烯(偏氟乙烯-三氟乙烯钴(vinylidenefluoride-co-trifluoroethylene)p(vdf-trfe)、锆钛酸铅(pzt)、钛酸钡(batio3)、钛酸铅(ii)(pbtio3)、钽酸锂(litao3)、氮化铝(aln)、含复合元素的硼硅酸盐矿物(电气石)、铌酸铅镁-钛酸铅(pmn-pt)或其任何组合,外加诸如以上所列出的那些的粘合剂。其他可能合适的压电材料包括以上列出的纳米复合材料中使用的任何填料的薄膜。
[0087]
凸起102可包括聚合物,例如介电聚合物、聚硅氧烷、橡胶、硅酮或诸如玻璃的非晶态晶体材料。
[0088]
图2a、图2b和图2c示出根据本发明的第二实施例的包括四个三维长方体凸起202的柔顺的三轴力传感器200。传感器200包括与上述传感器100相同的传感器主体,但四个圆顶形状的凸起102被四个长方体凸起202替换。因此,相似的参考标号将用于相似的部件。如上所述,每个凸起202具有延伸到第一电极层106中的两个列电极106a上和第二电极层108中的两个列电极上的覆盖区,使得施加到凸起202的力能够在至少四个离散区域中传递通过活性层110。
[0089]
图3a、图3b和图3c示出了根据本发明的第三实施例的包括四个三维圆柱形凸起202的柔顺的三轴力传感器300。传感器300包括与上述传感器100相同的传感器主体,但四个圆顶形凸起102被四个圆柱形凸起302替换。因此,相似的参考标号将用于相似的部件。如上所述,每个凸起302具有延伸到第一电极层106中的两个列电极106a上和第二电极层108中的两个列电极上的覆盖区,使得施加到凸起302的力能够在至少四个离散区域中传递通过活性层110。
[0090]
应当理解,上述三维凸起仅是示例,在其他实施例中,每个凸起可以是以下形式:平台、圆顶、半球、半球形段、圆锥、圆锥段、长方体、圆柱、半圆柱、棱锥、棱锥段、四面体、四面体段、六面体、三棱柱、多面体或其他形状。此外,传感器可包括不同形状和/或材料的凸起,以适合任何给定应用。
[0091]
图4是根据本发明的实施例的制造如上所述的传感器的一般方法400的流程图。方法400包括提供第一电极层106的步骤402,该第一电极层106具有处于第一取向的列电极106a的阵列;提供第二电极层108的步骤404,该第二电极层108具有处于与第一取向正交的第二取向的列电极108a的阵列;提供与力相关的活性层110的步骤406,该活性层110被配置为在受到力时改变至少一个特性并且设置在第一电极层106和第二电极层108之间;提供被布置成通过活性层110传输外部施加的力的至少一个三维凸起102、202、302的步骤408;以及提供至少一个间隔件的步骤410,该间隔件被布置成保持传感器中的两层或更多层之间的分离直到外力被施加为止。如上所述,下面将更详细地示出和描述间隔件。
[0092]
每一层、凸起或间隔件可由以下其中一种提供:印刷、丝网印刷、卷对卷印刷、喷墨印刷、3d印刷、静电纺丝、沉积、液滴分配、铸造、涂覆、模制、纺丝或编织。方法400可包括在单个基底104上形成至少第一电极层106和第二电极层108;将基底分离为两个部分;并将这两部分堆叠在一起,下面将进一步详细解释。方法400还可包括在所述分离和/或堆叠之前在至少一个部分上形成至少一个间隔件。
[0093]
图5a至图5i例示根据本发明的实施例的制造传感器的特定方法500的步骤。在图5a中,基层504被旋涂、沉积、铸造或喷涂到形成底部聚合物封装层的薄膜中。理想情况下,基层504由具有所需弹性性能的绝缘聚合物(例如pdms或parylene-c)制成,该绝缘聚合物
还可构成活性层的粘合剂材料的一部分。如果是旋涂,则可在硅烷化硅片上进行,这样聚合物不会卡住并且生产之后可以剥离装置。在图5b中,第一电极层506被丝网印刷、铸造、溅射涂膜或旋涂(例如,使用光刻图案)到底部列电极的矩阵阵列中。第一电极层506可由导电粘合剂组成,例如碳浸渍弹性体、诸如聚乙烯(3,4-乙基二氧噻吩)聚磺苯乙烯(pedot:pss)的本征导电聚合物、或诸如金或银的金属。图5c示出使用丝网印刷或光刻图案在第一电极层506中的每个列电极之间添加绝缘层514以获得额外的刚度或坚固性的可选步骤。在这种情况下,绝缘层514的材料可与基层504相同。图5d示出了丝网印刷、铸造、旋涂、喷涂或例如量子隧道材料(诸如上述那些)的薄活性层510的贴附。活性层510的厚度可确定传感器的灵敏度并且可从数十微米到数毫米变化。金属的类型以及粘合基质材料可根据所需的应用而变化,并且材料的组成可呈液体或固体形式。例如,活性层510可包括金纳米颗粒和pdms,或者可选地包括磁铁和水基聚合物墨。它可以是已知的材料或定制配方的材料。图5e示出了丝网印刷、铸造、溅射涂膜或旋涂(例如,使用光刻图案)以创建粘合剂材料的薄层(~10-100um厚),使得仅在待沉积电极之间的区域形成间隔件520,使得电极边缘位于间隔件边缘的顶部上。这些间隔件在电极之间形成小的气隙。可利用标准微加工或化学技术来创建气隙,诸如对使用例如光固化聚合物的部分可溶解的层进行图案化。图5f示出丝网印刷、铸造、溅射涂膜、旋涂或贴附(例如使用光刻图案)而在间隔件520的顶部上形成与第一电极层506垂直的第二电极层508中的顶部电极的矩阵阵列。第二电极层508能够由导电粘合剂组成,例如碳浸渍弹性体、诸如pedot:pss的本征导电聚合物、或诸如金或银的金属。可选地,在顶部电极形成其上的间隔件520之间设置支撑层。图5g示出使用丝网印刷或光刻图案技术在第二电极层508的顶部电极之间添加绝缘层514以获得额外的刚度或坚固性的可选步骤。如上所述,绝缘层514可以是与基层504相同的材料。在图5h中,顶层512被旋涂、沉积、铸造或喷涂到薄膜中以形成顶部聚合物封装层。顶层512可由具有所需弹性性能的绝缘聚合物制成,例如pdms或parylene-c,并且理想情况下可由与活性层510的粘合剂材料相同的材料形成。在图5i中,通过在四个重叠的电极或sensels中的每组上铸造聚合物层来形成凸起502而将四个三维表面凸起502添加到顶层512中。值得注意的是,凸起502与传感器的其余部分具有不同的弹性和刚度(例如,凸起502可能比传感器主体更具刚性)。例如,每个凸起502的三维形状可以是立方体、圆锥体或平台/半球,其角部应在一定程度上与四个下层电极重叠。这为阵列中的每组4个电极(即传感器元件)赋予成为单个三维或三轴力感测触觉元件(tactel)的能力。在方法500中描述的每个步骤之后,可添加可选的氧等离子体层、硫醇层或其他化学粘合剂层,以提高传感器的坚固性。如果基层502已被旋涂,则可能需要进一步的步骤,以通过将其剥离而从晶片上剥离整个组件。
[0094]
如果以上方法的粘合剂材料是可拉伸弹性体,那么还可以使整个传感器阵列可拉伸,以进一步增加其潜在应用。
[0095]
用于创建传感器的基底或基层504在某种程度上取决于应用。可采用仅在一个轴上柔顺的传统柔性电子基底,例如厚度为在25-125微米间变化的pet(聚对苯二甲酸乙二醇酯)和厚度为在10-100微米(通常为25微米)间变化的pen(聚萘甲酸乙二醇酯)。当需要高分辨率时,或者在装置需要抵抗恶劣的外部环境(诸如水下)的情况下,可能需要这些材料。对于不太苛刻的条件,可使用在多于一个的轴上柔顺的基底,例如tpu(热塑性聚氨酯)或硅胶。或tpu涂覆的硅酮,以减少在沉积之后纳米复合墨热固化期间于硅酮中引起的收缩。这
些材料的厚度还可在25-125微米之间。无纺布以及纸和各种橡胶或乳胶还可用作基材。各种其他聚合物还可用作基底。聚对二甲苯-c可用在10纳米-1微米的范围内,例如,用于生物相容的应用或需要极端柔顺和/或与外界完全密封的这些应用。此外,如有必要,可在基底的顶部设置墨,以在印刷期间促进用于电极的墨的扩散。
[0096]
可印刷第一层导电墨,其用作第一电极层506的导电轨迹且具有高导电性。为了定义该第一电极层506的矩阵图案,可使用通过切除或利用溶剂清洗而具有适当开口的漏印膜或掩模或丝网印刷网,能够使用在丝网印刷或卷对卷印刷中常见的刮板使墨经过该开口扩散到基底上。薄层电阻率在0.05ohm/毫米2范围内的这种电极层由纳米复合材料制成并且可以是柔性的或可拉伸的。可拉伸的墨与可允许一定比例拉伸的诸如tpu或硅胶的基底一起工作。此类墨包含大小通常为纳米量级且总尺寸通常为微米量级的导电颗粒,这些颗粒嵌入通常与用于确保墨中颗粒之间的均匀分散的溶剂化学品和表面活性剂混合的聚合物基质中。颗粒通常由银或碳组成,但也可由金、石墨烯、铜、钨、锌等组成。在丝网印刷中,沉积的墨的厚度可以为10-50微米(有时为100微米)量级,但如果使用喷墨印刷,则厚度还可以更小。一些电极的宽度可低至20微米至1毫米。
[0097]
电极墨沉积之后,它通常必须在80-120℃之间的温度下固化。在固化期间,部分溶剂在固化聚合物复合材料的同时蒸发。
[0098]
将传感器连接到读数电子设备和电极本身时可能需要的轨迹成分可以是相同的成分,也可以由不同的成分制成。可选地,可在延伸至每个电极下方的区域的导电轨迹的顶部上,利用具有不同成分的墨为电极印刷涂层。
[0099]
敏感的(潜在各向异性,即,通过材料厚度或其固有特性而仅对法线方向敏感)活性层中的一个或多个层被设置在每个传感器中。
[0100]
此外,可使用液滴分配方法将由介电聚合物组成的间隔件印刷或沉积到传感器上。这些间隔件的高度为~10-50微米,并且直径或宽度为~1-200微米,用于保持传感器的网格层彼此分离,直到施加特定的力。它们还用于重新分配力并防止传感器皮肤在弯曲时发生褶皱或起皱,这反过来可能会产生可能导致传感器上的压力读数的局部压力点或“气泡”。
[0101]
一旦传感器被印刷,则可在材料高度柔顺且可拉伸或者材料非常薄诸如25微米或更小的情况下在被连接的电极迹线或轨迹的端部添加加强件,使得正常的焊片或电缆可压接于其上,并且传感器电子元件可连接到刚性电子处理电路。
[0102]
图6a至图6i例示根据本发明的另一实施例的制造另一传感器的方法600的步骤。在每个步骤中,都以三维和二维视图示出传感器。在图6a中,选择合适的基底材料604(例如,pen、pet、tpu、pdms、tpu涂覆的硅酮、乳胶等),并将其制造成所需的厚度。在这种情况下,基底604将形成传感器的基层和顶层,如下面将更详细描述的。在该实施例中,基底604是厚度为36微米的pet。图6b示出在具有彼此垂直的行电极和列电极的矩阵阵列中印刷(例如,丝网印刷或喷墨印刷)第一电极层206和第二电极层608的步骤。电极由通常包含银或低电阻碳的墨形成。在本实施例中,电极由在25.4微米厚时薄层电阻率《0.010ω/面积(ω/square)的ci-1036可拉伸银基导电墨制成。在该示例中,电极被丝网印刷为乳剂厚度,因而该电极在固化之前具有14至25微米的厚度。每个电极具有2mm的宽度,并且在第一电极层606和第二电极层608中的每个中设置三个电极,以在组装时形成将为1cm宽
×
1cm长的传感
器。在基底604上的第一电极层606和第二电极层608之间设置2mm的间隙,以允许每层容易分离,如下面将描述的。图6c示出在第一电极层606和第二电极层608中的每个上丝网印刷碳层607、609的可选步骤。图6d示出在第一电极层606和第二电极层608中的每个上沉积(例如,丝网印刷、喷墨印刷、静电纺丝)活性层610的步骤。活性层可包括压阻和/或量子隧道和/或压电材料层,并且能够作为单层或更多层沉积在彼此的顶部上以控制层厚度。活性层可包括例如呈线、正方形、点或其他形状的形式的连续的片或离散部分。在该实施例中,活性层由量子技术超级传感器c75压阻墨形成,该墨仅被印刷在网格区域上的电极列和电极行的顶部上,并具有与先前的层相似的厚度。在图6e中,使用介电质、绝缘或导电材料来沉积间隔件层620。可例如通过丝网印刷、喷墨印刷或使用液滴分配器沉积间隔件层620。在该实施例中,在形成第二组电极608的电极之间的间隙中,仅在基底604的一侧形成间隔件层620。在该示例中,间隔件层620包括圆柱形柱阵列,每个均具有50微米的直径和100微米的高度并且在基底604上以1mm的间距设置。本示例中用于间隔件层620的材料是既可拉伸又是柔性的诸如ems di-7548的介电质。间隔件层620能够以单厚度的层、施加在相互顶部上的更多层的方式印刷在传感器的一侧,或者如果层是薄的则印刷在传感器的两侧(尽管这需要精确对齐)。
[0103]
在图6f中,例如使用剪刀、激光器、刀式绘图仪或电子束光刻来切割基底604,以将第一电极层606和第二电极层608分离成两个部分。然后向内折叠这两部分,使得第二电极层608堆叠在第一电极层606的上方而形成如图6g所示的导电矩阵网格。在该配置中,附接到第二电极层608的基底604形成传感器的顶层。此外,间隔件层620的柱在形成基层的基底604和形成顶层的基底604之间延伸,从而在活性层610的被设置在第一电极层606和第二电极层608之间的部分存在气隙622。当类似于图6g堆叠传感器时,间隔件层620用于在传感器弯曲时分配力,并且在这种情况下还用于保持活性层610之间的气隙,以确保存在开路,直到施加给定的偏移力。在一些实施例中,可利用沿装置的边缘并且围着感测层区域涂覆的粘合剂膏(例如,硅胶pdms)来粘合传感器的侧部,以将其与外部环境密封并以耐用的方式将传感器侧部彼此层压在一起。此外,可将aptes(3-氨基丙基三乙氧基硅烷)连接剂的蒸汽沉积应用到顶层上1小时。在一些实施例中,在此阶段传感器可完全涂覆有柔顺的聚合物,例如乳胶。对于极薄的传感器,可使用浸涂技术。
[0104]
如图6h所示,然后将凸起602应用到传感器的顶表面,以将力转换为力矩。为了感测力的方向和大小,应将凸起放置在每组4个正交排列的电极(sensels)的中心,该凸起可在被按下时将所施加的任何力转换为力矩。然后,力矩将比其他传感器元件更重地压缩一些传感器元件,这可通过附接的电子电路进行读数。可通过使用各种印刷技术(包括3d印刷或硅蚀刻)印刷多个介电质层,或者通过在模具中铸造凸起(在这种情况下,当使用的聚合物处于液态或部分固化状态时需要将传感器倒置在模具上,然后必须固化整个组件)来制造凸起。在本实施例中,由用于四个立方体凸起602(高度为2mm,长度和宽度为6mm)的pla制造原模。然后将液体pdms(或硅胶/乳胶/tpu/橡胶)铸造到模具中(弹性体与固化剂的重量比为10:1),并使其在烤炉中于80摄氏度下固化1小时。在此之后,在将pdms粘合到基底604的pet顶层之前,利用uv臭氧或氧等离子体处理pdms以进一步增加粘附力。该组件被放置一夜,以在pdms凸起和pet之间形成牢固的结合。凸起602本身可以是刚性的或柔顺的,只要它们允许装置在给定厚度下弯曲。较薄的凸起602以及由高度柔顺的材料制成的凸起将在弯
曲时使测量值失真更少,因而在装置处于弯曲状态时为法向力提供更好的各向异性选择性。
[0105]
如图6i所示,最终可选的步骤可包括层压传感器的顶部或传感器的边缘或整个传感器结构或者使其绝缘,以形成对外部元件不能渗透的盖层624。可使用例如完全适形的帕利烯涂层(更具体地,是厚度为1纳米到1微米的帕利烯-c)进行层压,并且可利用硅酮、橡胶、聚氨酯或其他共混聚合物来实现绝缘。
[0106]
可以理解的是,可以为传感器中的任何层采用任何合适的印刷机。然而,合适的丝网印刷机的示例是horizon dek i3tm。
[0107]
可使用已知的零电位法进行传感器的读数。这可使大的阵列内的相邻传感器之间的串扰最小化。在电阻阵列电路中,当一个感测元件的电阻接近其周围的其他元件的电阻时,可能会产生大的干扰电流。在此描述的负压阻系数传感器中,感测元件的电阻随着压力的施加从高电阻开始减小。这意味着在所描述的传感器中,由于材料在静止时具有高电阻,低的压力产生更高的干扰。下面提供这些与图12a至图12c相关的传感器的操作的更多细节。
[0108]
图7a至图7g例示根据本发明的又一实施例的制造传感器的方法的步骤。该传感器可被认为是4线单点传感器,其操作与上述其他传感器不同。特别地,该传感器的不同之处在于,它测量施加在电极网格中的4条线之间的电阻区域内的压力的“质量中心”。由于质心的位置能够为我们提供力的方向,该传感器的凸起以与操纵杆类似的方式执行功能。
[0109]
如图7a所示,选择合适的基底704材料及其厚度。在该实施例中,基底704由厚度为36微米的pet形成。图7b示出同一基底704上第一电极层706和第二电极层708的丝网印刷,其中每层中的电极彼此垂直地定位。在本实施例中,电极由ems ci-1036
tm
可拉伸银基导电墨制成,该导电墨在25.4微米的厚度时具有《0.010ω/面积(square)的低的薄层电阻率。在该实施例中,电极以乳剂厚度被丝网印刷,使得固化前的墨厚度为14至25微米。电极为2mm宽并且仅沿着第一电极层706和第二电极层708中的每个的边缘设置两个电极,以形成1cm
×
1cm的覆盖区传感器。
[0110]
图7c示出沉积在第一电极层706中的两个电极的顶部上并在这两个电极之间延伸的第一高电阻碳层707以及沉积在第二电极层709中的两个电极的顶部上并在这两个电极之间延伸的第二高电阻碳层709的丝网印刷。在该实施例中,两个高电阻碳层都由被称为eci 7004hr和nci 7002墨的两种henkel
tm
墨混合(按重量计80%/20%的混合物)而成,以在固化之后得到在10微米厚时的~10,100ω/面积(square)/毫升的薄层电阻率。通过具有约20-40微米乳剂厚度的网进行沉积。在其他实施例中,可使用ems
tm ci-2050lr(在25.4微米时,1,500
–
2,500ω/面积/毫升)和/或hr(在25.4微米时,》10mω/面积/毫升)形成高电阻碳层。在一些实施例中,第一高电阻碳层707和第二高电阻碳层709可以是不同的。
[0111]
对于这种类型的传感器,重要的是高电阻碳层707、709的电阻比装置内的引线电阻和与外界接口的接触电阻的总和高得多。其原因在于,当在装置的顶部电极层708或底部电极层706上施加电压时,期望大部分电压降低发生在电阻碳区域内。这确保可测量到施加到凸起层的力矩的压力中心的位置:当向装置施加压力时,两个活性层710围绕给定的点相互接触。如果在装置的一侧(顶部或底部)的电极上施加电位差并从装置的另一侧的任一电极测量电压,则形成分压器电路。从与碳平面相对的电极之一(于其上施加有电位差)电压
读数将给出压力所施加到的两个电极之间的压力位置(在一个轴上)。可翻转这种电气配置,以便读取另一个轴的位置,其中电极/碳层位于设备的另一侧。
[0112]
图7d示出在第一高电阻碳层707和第二高电阻碳层709中的每一个上的活性层710的丝网印刷、喷墨印刷或静电纺丝。在该实施例中,活性层710由量子技术超级传感器c75压阻水基墨形成。
[0113]
在图7e中,包括短圆柱形间隔件点的方形阵列的间隔件层720被提供在基底的一侧(第一侧)的活性层710上。每个间隔件点的高度为200微米,与其相邻点的间隔开2mm。在该实施例中,使用stratasys的tango
tm
(即tangoplus
tm
,flx930)材料(其是模拟橡胶热塑性弹性体的polyjet
tm
可印刷材料)来印刷间隔件层720。该材料的典型特性是肖氏刚度为26-28,断裂伸长率为170-220%。因此,即使在装置本身是平的时进行施加压力,间隔件也能够承受弯曲时装置顶部和底部处的拉应力和压应力之间的差异。然后,例如使用剪刀、激光器、刀式绘图仪或电子束光刻切割基底704,以将第一电极层706和第二电极层708分离为两个部分。然后向内折叠这两部分,使得第二电极层708堆叠在第一电极层706的上方而形成如图7e所示的导电矩阵网格。在该配置中,附接到第二电极层708的基底704形成传感器的顶层。此外,间隔件层720的柱在第一电极层706上的活性层710和第二电极层708上的活性层710之间延伸,使得在活性层710的中间存在空气间隙,如图7f所示。一旦装置被切割和折叠,便利用被涂覆在装置的边缘周围的硅树脂pdms粘合剂来粘合侧部。然后将aptes(3-氨基丙基三乙氧基硅烷)连接剂的蒸汽沉积应用到装置的上表面上1小时,以促进以下所述的pdms粘附。
[0114]
在图7g中,凸起702设置在传感器的中间,与电极网格间隔开。凸起702可以是铸造或印刷的,并且为此可使用多种聚合物,例如更柔顺的pdm或不柔顺的su8。根据所需的应用,凸起702可具有各种形状、大小和高度。在本实施例中,用于长方体凸起702的原模由pla制成,其高度为2mm,长度和宽度为6mm。将液体pdms铸造到模具中(弹性体与固化剂的重量比为10:1),并将其在烤炉中80摄氏度下固化1小时。在此之后,在被粘贴到基底704的顶层之前,利用uv臭氧或氧等离子体处理pdms以进一步增加粘附。该组件可放置一夜,以能够在pdms凸起和基底704之间形成牢固的结合。
[0115]
对于这种类型的传感器,每个凸起702的读数由三个单独的读数组成。x位置需要一个读数,y位置需要另一个读数,如下所解释。每次,在一个平面的电极(即,第一电极层706或第二电极层708)上施加电压(和电流),并使用相对平面上的电极(即,第一电极层706或第二电极层708中的另一个)中的一个读出一个电压。这形成了一个分压器电路,其中读取的电压对应于两个平面接触的(x或y)位置(其是施加力的位置)。重要的是,高电阻碳层的电阻远高于将装置连接到外界的引线电阻和接触电阻,使得它们基本上可以忽略不计。否则,在引线中将出现一些显著的压降时位置读数受到限制。
[0116]
为了读出力本身,电流必须从一个平面流到另一个平面,其中活性层710(即,压阻材料)位于这两个平面之间。这可通过在顶平面(即,第二电极层708)上的一个电极和底平面(即,第一电极层706)上的另一个电极之间施加电位差来实现。在这种情况下,施加的压力影响活性层的电阻,这进而改变通过装置的电流。因此,活性层710上的总压降也会改变。通过在两个平面上使用相对的电极(不用于传输电流),能够测量两个位置的电压。这对应于电子文献中所称的四点探针测量,这是因为它不测量接触电阻或者在这种情况下不测量
装置的电极及其相应引线中的压降。然而,由于我们测量的是压降,所以它并不完美。根据施加压力的位置,高电阻平面上的不同距离将需要电流穿过,这由于施加压力的位置而在电阻层中引起可变电阻而因此的可变压降。知道高电阻层的电阻以及均匀性可了解通过基于位置并通过装置校准应该调整多少电阻测量值。因此,当传感器的顶部上的凸起702受到力时,其剪切分量在凸起702上产生力矩,这将压力中心集中到装置的特定区域。对该力的位置和大小的测量允许测量力的平均方向和大小。
[0117]
本发明的任一实施例中的间隔件用于分配力,并防止在传感器中形成被错误地记录为压力的褶皱,同时确保在未施加偏置力时存在开路。图8a至图11c示出用于本发明的实施例中的各种示例性间隔件布置。出于例示目的,在每种情况下仅示出传感器的一部分。
[0118]
图8a和图8b示出根据本发明的实施例的包括不同的圆柱形间隔件构造的传感器的一部分的平面视图。在这两种情况下,基底804在第一电极层806中设置有三个水平电极,并在第二电极层808中设置有三个正交电极。活性材料810设置在第一电极层806和第二电极层808中的电极之间。在这两种情况下,间隔件都由圆柱形杆、柱或点形成。
[0119]
在图8a中,间隔件820a被印刷在基底804的两侧,并且被布置成在电极矩阵重叠部之间从每个电极层或穿过每个电极层延伸到基底804。
[0120]
在图8b中,间隔件820b仅印刷在基底804的一侧上,并且被布置成在电极矩阵重叠部之间在基底804的下部和上部之间延伸。
[0121]
图8a和图8b中的间隔件可由聚合物形成,例如介电聚合物、聚硅氧烷、橡胶或硅酮或诸如玻璃的非晶态晶体物质。间隔件的形状可以是圆柱形、锥形或锥形段、金字塔形或金字塔形段、长方体、半球形或半球形段、半圆柱形、四面体或四面体段、六面体、三棱柱体、多面体、其他形状。在一些实施例中,可对间隔件进行分级,使得它们的高度、形状、尺寸或传感器上的间距改变。在一示例中,间隔件可以是宽度为50微米、高度为25微米、间距为1mm的锥形。
[0122]
图9a和图9b示出根据本发明的实施例的传感器的一部分的平面视图,该传感器包括不同的菱形间隔件构造。在这两种情况下,基底904都在第一电极层906中设置有三个水平电极并在第二电极层908中设置有三个正交电极。活性材料910设置在第一电极层906和第二电极层908中的电极之间。在这两种情况下,间隔件都由菱形或方形网格构成。
[0123]
在图9a中,间隔件920a仅印刷在基底904的一侧上,并且被布置成在电极矩阵重叠部之间从每个电极层或穿过每个电极层延伸。
[0124]
在图9b中,间隔件920b印刷在基底904的两侧上,并且被布置成在电极矩阵重叠部之间在基底904的上部和下部上和/或上部与下部之间延伸。
[0125]
图9a和图9b中的间隔件可由织物网格或柔性/橡胶聚合物网格形成,例如,使用各种软聚合物中的任何一种进行3d打印。
[0126]
图10a和图10b示出根据本发明的实施例的包括不同的方形间隔件构造的传感器的一部分的平面视图。在这两种情况下,基底1004在第一电极层1006中被提供有三个水平电极并在第二电极层1008中被提供有三个正交电极。活性材料1010被提供在第一电极层1006和第二电极层1008中的电极之间。在这两种情况下,间隔件都由中空的方形柱构成。
[0127]
在图10a中,间隔件1020a仅印刷在基底1004的一侧上,并且被布置成围绕大的传感器区域延伸,例如,用单个正方形包围九个电极重叠部。
[0128]
在图10b中,间隔件1020b仅印刷在基底1004的一侧上,并且被布置成例如在每个电极矩阵重叠部之间围绕小的传感器区域延伸。
[0129]
图10a和图10b中的间隔件可由与上述圆柱形或菱形间隔件类似的材料制成。
[0130]
图11a、图11b和图11c示出根据本发明的实施例的包括不同的六边形间隔件构造的传感器的一部分的平面视图。在每种情况下,基底1104在第一电极层1106中被提供有三个水平电极并在第二电极层1108中被提供有三个正交电极。活性材料1110被提供在第一电极层1106和第二电极层1108中的电极之间。在每种情况下,间隔件由不同尺寸的中空的六边形(即,蜂窝)网格构成。
[0131]
在图11a中,间隔件1120a仅印刷在基底1104的一侧上,并且被布置成在电极矩阵重叠部之间延伸。
[0132]
在图11b中,间隔件1120b仅印刷在基底1104的一侧上,并且被布置成在每个电极矩阵重叠部上和/或之间围绕小的传感器区域延伸。
[0133]
在图11c中,间隔件1120c仅印刷在基底1104的一侧上,并且被布置成在电极矩阵重叠部之间延伸并束缚所述电极矩阵重叠部。
[0134]
图11a、图11b和图11c中的间隔件可由被挤压或印刷的网格形成。这些可以是蜂窝、三角形、四边形、菱形、带套圈的菱形、方形或平面的形状。可根据应用选择各种不同的织物,并且必须确保足够多的传感器活性层可相互接触。编织网格的用途与其他间隔件层相同。除此以外,还可采用平纹荷兰织物、斜纹织物、平纹织物、斜纹荷兰织物、锁扣卷曲、内卷曲、斜纹荷兰双织物或绞合织物。网格可由非导电纺织线或导电线(例如,银或钛)制成,可用于在传感器内分配压力的同时提高灵敏度。
[0135]
为了制造完全柔顺的扁平的传感器,有多种挑战:传感器必须是薄的,电极必须柔顺,并且传感器不得对除所需的力之外的力做出反应。量子隧道活性层材料由于它始于非常高的电阻(~109ω)而是有利的。这种材料的触点可由多种不同的材料组成,然而电极必须是柔顺的并有轻微的弹性,使得材料可用于包裹住物体。一种方法是制作可拉伸的银电极或者交替地使用导电粘合剂,即便它们根据压力略有变化。
[0136]
如上所解释,可以通过将活性层夹在于两侧上沿垂直方向移动的行电极和列电极之间来制作这些传感器的网格/矩阵。这之前已经由不柔顺的电极和电子器件实现,甚至由弯曲半径有限但在任何宏观可观察的表面上不完全柔顺的“柔性”电子器件实现。为了从矩阵读数,需要多路转接器,其逐个读数阵列中的每个传感器元件(感测像素)并附接到微控制器或其他信号处理硬件和软件。
[0137]
在本发明的实施例中,提出了一种简单的装置,其中不仅整个装置本身是柔顺的,而且网格中的每一簇4个传感器元件都可通过包括作为装置的顶层的力传递结构的“凸起”或形状而转换为3d力感测“tactel(触觉像素)”。
[0138]
该装置是为了使用印刷诸如卷对卷印刷、丝网印刷或类似的微加工技术进行大批量生产而设计。
[0139]
上述传感器的主要工作机制如下:改变4个传感器元件中的每一个的电阻以及它们的正态分布,用于估计传感器上的三向力。每个凸起均用作力传递结构。通过在每个凸起上施加定向力,通过使“凸起”变形而产生应力。力的法向分量均匀地压缩其下方的每个传感器元件(引起对称的电阻变化),然而剪切分量在活性层中产生力矩,该力矩对一些传感
器元件比其他传感器元件压缩更大(引起不对称的电阻变化)。通过改变活性层的厚度和结合材料以及“凸起”和底层基底材料的高度和刚度,可调节其灵敏度。
[0140]
单个网格线可被制造成小到10微米,并且它们之间的间隔尽可能小,只要在层之间不建立可能产生串扰和短路的隧道。
[0141]
为了读出信号,每个列电极和每个行电极必须连接到适当的电子读数电路。在读出信号时,由于每个电极在空间上彼此分离,因此电阻性串扰噪声显著降低。然而,为了进一步减少串扰或提高每个传感器元件的信噪比(snr),可采用以下方法之一:i)普布里克电压镜法,其中在测量点处未考虑的驱动线在等于输出电压的电位下设定,或ii)更简单的零电位法,其中扫描电极的电压被设置为零。这些形成消除串扰影响的等电位区。在实践中,有多种方法配置以上电路。
[0142]
装置的校准是必要的,然而,如果提供适当的训练数据,那么机器学习或人工智能算法也能够“学习”传感器如何工作。能够使用这种传感器测量的力的范围从0.01n变化到理论上的无限量,这取决于活性层的配方、其粘合剂和传感器的总厚度。
[0143]
没有一个层具有优选的厚度,但是为了使整个装置柔顺,预计它们不大于1mm厚且不小于10nm薄。表面上的凸起可包括与所列出的形状不同的形状,然而每4个传感器元件有1个凸起的限制在大多数情况下适用。
[0144]
图12a示出了根据本发明的实施例的传感器的单个触觉元件(tactel)1200的俯视透视图。该触觉元件具有圆顶形状凸起1202,其设置在代表要读取的像素的4个传感器元件c1、c2、c3和c4上。下表1示出由4个传感器元件中的每一个在受到不同的力时经历的电阻变化。因此,可以确定如何能够将这种传感器的电子读数转换为所施加的力的位置、大小和方向的测量值。
[0145][0146]
表1:响应于力的方向的传感器元件变化
[0147]
图12b示出图12a的触觉元件1200在向凸起1202施加斜向力之前和之后的侧面透视图以及相应的力与时间的曲线图。这例示当施加斜向力时,x、y和z轴上所受到的力的差异。
[0148]
图12c示出当斜向力被施加到凸起1202时图12b的触觉元件1200的侧视图。为了便于例示,这示出简化的传感器层结构,其包括被夹在上基底和下基底1204之间的活性层1210。在本示例中,传感器元件c3在施加力时经历小的变形而传感器元件c4经历大的变形。这在c3中被转化成比c4中更弱的变化,而有助于准确确定所施加的力的方向。
[0149]
所描述的传感器有多种应用。这些来自于对可靠工作的柔顺三轴力传感器的大量工业、家庭和医疗需求。示例包括机器人技术(硬机器人和软机器人、滑动检测)、电子皮肤、
假肢、人机交互、触觉系统和诸如墙壁和地板的表面、虚拟现实、游戏、结构完整性监测(机翼、建筑物)、智能服装(例如,手套)、步态分析鞋垫(地面反作用力方向、整体压力、糖尿病足溃疡监测等,这可替代力感测板)、运动冲击监测(可检测冲击的方向和大小)、植入式设备、可穿戴设备(例如,用于智能家居)、生物医学设备、药物递送贴片/系统、可拉伸电子电路、成人和性玩具行业(例如,具有实时性能/反馈和/或自适应设备的玩具或玩偶)、感知运动的枕头、监测褥疮的病床、血压监测和检测(例如,用于通过例如衣服或可穿戴设备监测血压和流动的冠心病(cvd)诊断)、肌力/体力消耗、疲劳监测和检测、监测叶片周围的流动特征以增加使用寿命或发电能力的潮汐或风力涡轮机、可能设想使用自动机器人并需要高度灵巧和触觉信息的所有区域(例如,仓库分拣、空间探索、搜索和救援、老年护理、烹饪、电子组装、捕鱼、社交机器人等)、飞机机翼(监测载荷/力有助于减轻重量和削减成本以及更好的机翼设计)、施工工作环境中的力监测、马鞍压力监测、肌力绘图/监测、组织刚度/密度监测(例如,乳腺癌诊断/女性离分娩有多近)、假肢(例如用于截肢者,还用于诸如帕金森氏症、als等的某些疾病的震颤补偿)以及其他。
[0150]
在一些实施例中,压阻层和压电层可在应用凸起层之前堆叠,以更好地模拟皮肤中的高频和低频机械感受器。
[0151]
此外,该装置可倒置使用(即,凸起邻接用户皮肤,并且通过基层施加力),如果要在装置的表面上保持空气动力学或流体动力学特性,这可能特别有益。
[0152]
虽然前述描述已经描述了示例性实施例,但本领域技术人员将理解,可在权利要求定义的本发明的范围内进行实施例的多种变化。此外,一个或多个实施例的特征可与一个或多个其他实施例的特征混合和匹配。
[0153]
参考文献:
[0154]
[1]u.kim、d.h.lee、y.b.kim、d.y.seok和h.r.choi,“一种用于机器人应用的新型六轴力/力矩传感器”,ieee/asme trans.mechatronics,2017年,第22卷,第3期,第1381-1391页。
[0155]
[2]y.guo、j.kong、h.liu、h.xiong、g.li和l.qin,“传感器和致动器a:基于光纤光栅的物理三轴力指尖传感器”,sensors actuators a.phys,2016年,第249卷,第141-148页。
[0156]
[3]s.harada、k.kanao、y.yamamoto、t.arie、s.akita和k.takei,“全打印柔性指纹类用于人造皮肤的三轴触觉和滑动力及温度传感器”,acs nano,2014年,第8卷,第12期,第12851-12857页。
[0157]
[4]s.sundaram、p.kellnhofer、y.li、j.-y.zhu、a.torralba和w.matusik,“使用可伸缩触觉手套学习人类抓握的特征”,nature,2019年,第569卷,第7758期,第698-702页。
[0158]
[5]d.m.vogt、y.l.park和r.j.wood,“使用嵌入式微流控通道的柔性多轴力传感器的设计与表征”,ieee sens.j.,2013年,第13卷,第10期,第4056-4064页。
[0159]
[6]r.agarwal和s.bergbreiter,“在夹持任务期间使用低成本触觉感测系统测量剪切力”,2019年第2届ieee国际会议.《软体机器人》,第330-336页。
[0160]
[7]h.k.lee、j.chung、s.il chang和e.yoon,“使用柔性电容式聚合物触觉传感器实时测量三轴接触力分布”,j.micromechanics microengineering,2011年,第21卷,第3期。
[0161]
[8]k.noda、k.matsumoto和i.shimoyama,“使用导电液体的可拉伸三轴力传感器”,sensors actuators,a phys.,2014年,第215卷,第123-129页。
[0162]
[9]p.yu、w.liu、c.gu、x.cheng和x.fu,“用于动态三轴力测量的柔性压电触觉传感器阵列”,《传感器(瑞士)》,2016年,第16卷,第6期。
[0163]
[10]xiaoliang chen、jinyou shao、hongmiao tian、xiangming li、yazhou tian和chao wang,“具有微结构增强压电效应和特殊排列的压电阵列的柔性三轴触觉传感器”,smart mater.struct.,第2018年,第27卷,第2期,第025018(第11页)部分。
[0164]
[11]c.hu、m.q.h.meng、m.mandal和x.wang,“用于跟踪磁铁位置和方向的三轴磁传感器阵列系统”,proc.world congr.intell.control autom.,第2006年,第2卷,第5304
–
5308页。
[0165]
[12]h.wang等,“使用3d霍尔传感器的低成本软触觉传感阵列”,procedia engine.,2016年,第168卷,第650-653页。
[0166]
[13]h.wang等,“三轴柔性感应触觉传感器的设计和特性”,ieee sens.j.,2018年,第18卷,第19期,第7793-7801页。
[0167]
[14]d.jones、h.wang、a.alazmani和p.r.culmer,“实时评估组织特性的柔性多轴力传感器”,ieee int.conf.intell.robot.syst.,2017年,第2017-9月卷,第5738-5743页。
[0168]
[15]j.lee、s.pyo和m.kim,“基于固定、自调整碳纳米管阵列的多向柔性力传感器”。
[0169]
[16]s.pyo等,“基于丝网打印碳纳米管聚合物复合材料的柔性三轴触觉传感器的开发”,j.micromechanics microengineering,2014年,第24卷,第7期。
[0170]
[17]j.zhang等,“基于微结构石墨烯的界面接触电阻的高灵敏柔性三轴触觉传感器”,nanoscale,2018年,第10卷,第16期,第7387-7395页。
[0171]
[18]y.jung、d.g.lee、j.park、h.ko和h.lim,“识别多向力的压阻式触觉传感器”,《传感器(瑞士)》,2015年,第15卷,第10期,第25463-25473页。
[0172]
[19]k.s.tao liu、yoshio inoue,“用于可穿戴力板的小型低成本三维触觉传感器”,ieee sens.j.,2009年,第9卷,第9期,第1103-1110页。
[0173]
[20]t.zhang、h.liu、l.jiang、s.fan和j.yang,“用于拟人化人工手的柔性三维触觉传感器系统的开发”,ieee sens.j.,2013年,第13卷,第2期,第510-518页。
[0174]
[21]t.zhang、l.jiang、x.wu、w.feng、d.zhou和h.liu,“用于多指抓取的指尖三轴触觉传感器”,ieee/asme trans.mechatronics,2015年,第20卷,第4期,第1875-1885页。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1