估计装置的制作方法
估计装置
1.相关申请的交叉引用
2.本国际申请主张于2019年10月9日在日本专利厅申请的日本专利申请第2019-186316号的优先权,通过参照将日本专利申请第2019-186316号的全部内容引用至本国际申请。
技术领域
3.本公开涉及估计装置。
背景技术:
4.已知有针对雷达装置估计高度方向上的位置的偏移这样的技术。例如在下述专利文献1中,公开了如下技术:对向车彼此具有雷达装置,基于通过对向车检测出的本车的雷达装置的高度与本车预先存储的雷达装置的高度之间的偏离量,估计高度方向上的偏移。
5.专利文献1:日本专利第6386412号公报
6.然而,发明者的详细的研究的结果是,在专利文献1所记载的技术中,发现了不能仅通过本车来估计高度方向上的偏移这样的课题。
技术实现要素:
7.本公开的一方式提供能够仅通过本车来估计雷达装置的高度方向上的偏移的技术。
8.本公开的一方式是搭载于移动体的估计装置,具备获取部、提取部以及估计部。获取部被构成为针对通过搭载于移动体的雷达装置检测到的多个反射点中的每个反射点,获取反射点信息。反射点信息至少包含水平角度及垂直角度、和从雷达装置到反射点为止的距离,水平角度及垂直角度是关于反射点的方位角,并且是以沿着雷达波束的中心轴的方向亦即波束方向为基准而求出的。提取部被构成为至少基于反射点信息,提取多个反射点中的通过在路面的反射而检测出的至少一个路面反射点。估计部至少基于从雷达装置到路面反射点为止的距离亦即路面反射点距离,估计搭载于移动体的雷达装置的高度亦即装置高度。
9.根据这样的构成,能够不使用其它车辆的检测结果,而仅通过本车来估计装置高度。其结果是,能够仅通过本车来估计雷达装置的高度方向上的偏移。
附图说明
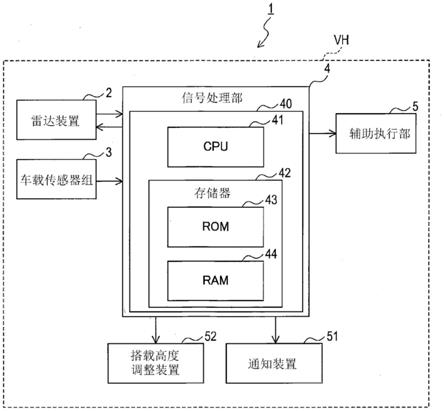
10.图1是表示车辆控制系统的构成的框图。
11.图2是说明雷达波的水平方向上的照射范围的说明图。
12.图3是说明雷达波的垂直方向上的照射范围的说明图。
13.图4是说明信号处理部的功能的框图。
14.图5是说明雷达装置的高度方向上的位置的偏移的说明图。
15.图6是第一实施方式的调整处理的流程图。
16.图7是路面反射提取处理的流程图。
17.图8是第一实施方式的计算处理的流程图。
18.图9是说明第一实施方式中的高度偏移量的估计的说明图。
19.图10是第二实施方式的调整处理的流程图。
20.图11是第二实施方式的提取频率处理的流程图。
21.图12是说明存储提取频率的样子的说明图。
22.图13是说明对应信息的例子的说明图。
23.图14是说明第二实施方式的装置高度的估计例的说明图。
24.图15是说明第二实施方式的变形例的装置高度的估计例的说明图。
25.图16是第三实施方式的调整处理的流程图。
具体实施方式
26.以下,参照附图,对本公开的例示的实施方式进行说明。此外,以下所说的“垂直”并不限定于严格意义上的“垂直”,只要起到相同的效果,则也可以不是严格的“垂直”。以下所说的“水平”、“一致”也相同。
27.[1.第一实施方式]
[0028]
[1-1.构成]
[0029]
图1所示的车辆控制系统1是搭载于作为移动体的车辆vh的系统。车辆控制系统1具备雷达装置2、车载传感器组3、信号处理部4以及辅助执行部5。另外,车辆控制系统1也可以具备通知装置51、搭载高度调整装置52。以下,也将搭载车辆控制系统1的车辆vh称为本车vh。另外,也将本车vh的车宽方向称为水平方向,将车高方向称为垂直方向。
[0030]
如图2以及图3所示,雷达装置2搭载于本车vh的前侧。雷达装置2向本车vh前方的水平方向上的规定角度范围ra内以及本车vh前方的垂直方向上的规定角度范围rb内照射雷达波。雷达装置2通过接收所照射的雷达波的反射波,生成与反射了雷达波的反射点相关的反射点信息。
[0031]
此外,雷达装置2既可以是使用毫米波段的电磁波作为雷达波的所谓的毫米波雷达,也可以是使用激光作为雷达波的激光雷达、使用声波作为雷达波的声呐。总之,发送接收雷达波的天线部被构成为针对水平方向以及垂直方向中的任何一个都能够检测反射波的到来方向。天线部也可以具备在水平方向以及垂直方向上排列的阵列天线。
[0032]
在本实施方式中,雷达装置2被安装为波束方向与本车vh的前后方向即行进方向一致,用于检测存在于本车vh的前方的各种物标。波束方向是指沿着照射的雷达波束的中心轴ca方向的方向。雷达装置2生成反射点信息。
[0033]
反射点信息是指与反射点相关的信息。在反射点信息中至少包含反射点的方位角、反射点的距离。反射点的距离是指雷达装置2与反射点之间的距离。此外,雷达装置2也可以被构成为检测反射点的相对于本车vh的相对速度、由反射点反射的雷达波束的接收强度,在反射点信息中也可以包含反射点的相对速度、接收强度。
[0034]
如图2、3所示,反射点的方位角是指以沿着雷达波束的中心轴ca的方向亦即波束方向为基准而求出的、反射点存在的水平方向的角度(以下,称为水平角度)hor以及垂直方
向的角度(以下,称为垂直角度)ver中的至少一方。在本实施方式中,在反射点信息中包含垂直角度ver以及水平角度hor双方作为表示反射点的方位角的信息。
[0035]
在本实施方式中,雷达装置2采用fmcw方式,按照预先设定的调制周期交替地发送上行调制区间的雷达波和下行调制区间的雷达波,并接收反射的雷达波。fmcw是frequency modulated continuous wave(调频连续波)的省略。在本实施方式中,雷达装置2按照每个调制周期,如上述那样检测反射点的方位角亦即水平角度hor以及垂直角度ver、到反射点为止的距离、与反射点的相对速度、接收到的雷达波的接收功率作为反射点信息。以下,将接收到的雷达波的接收功率称为反射功率。
[0036]
车载传感器组3是为了检测本车vh的状态等而搭载于本车vh的至少一个传感器。在车载传感器组3中也可以包含车速传感器。车速传感器是基于车轮的旋转检测车速的传感器。另外,在车载传感器组3中也可以包含相机。该相机拍摄与雷达装置2的雷达波的照射范围相同的范围。另外,在车载传感器组3中也可以包含加速度传感器。加速度传感器检测本车vh的加速度。另外,在车载传感器组3中也可以包含横摆率传感器。横摆率传感器检测表示本车vh的行进方向相对于本车vh前方的倾斜的横摆角的变化速度。
[0037]
信号处理部4具备微机40。微机40包含cpu41、和rom43、ram44、闪存等半导体存储器(以下,称为存储器42)。cpu41执行程序。rom43储存cpu41执行的程序、在该程序的执行时参照的数据等。ram44暂时存储数据。
[0038]
如图4所示,信号处理部4至少具备识别部45和估计部46,作为通过由cpu41执行程序而实现的功能的构成。
[0039]
辅助执行部5基于信号处理部4具备的识别部45的处理结果,控制各种车载设备,执行规定的驾驶辅助。在成为控制对象的各种车载设备中也可以包含显示图像的监视器、输出警报音或引导声音的声学设备。另外,也可以包含控制本车vh的内燃机、动力传动机构、制动器机构等的控制装置。
[0040]
通知装置51是设置在车厢内的声音输出装置,对本车vh的乘客输出警告音。此外,也可以使用辅助执行部5具备的声学设备等作为通知装置51。
[0041]
搭载高度调整装置52具备马达和安装于雷达装置2的齿轮。搭载高度调整装置52根据从信号处理部4输出的驱动信号使马达旋转。由此,马达的旋转力传递到齿轮,而能够使雷达装置2在垂直方向上进行上下。
[0042]
[1-2.处理]
[0043]
[识别部]
[0044]
识别部45实施物标识别的功能。物标识别的功能是指基于从雷达装置2得到的反射点信息、从车载传感器组3得到的各种信息,检测本车vh行驶的车道、与本车vh在同一车道上行驶的先行车辆、其它的障碍物等的功能。物标识别的结果输出给辅助执行部5等。
[0045]
[估计部]
[0046]
雷达装置2例如在自工厂的出厂时那样的初始状态下,正确地在本车vh安装于预先决定的位置。以下所说的初始高度是指此时的雷达装置2的距路面的高度。例如,初始高度预先存储于rom43等存储器42。基于设置于初始高度的雷达装置2的检测结果,在上述的识别部45中,能够精度良好地实现物标识别的功能。
[0047]
然而,在本车vh中,雷达装置2可能产生高度偏移。高度偏移的例子如图5所示。以
虚线示出的雷达装置200表示设置于初始高度f时的雷达装置。例如,在用户将本车vh的轮胎更换为与存储了初始高度时不同的轮胎半径的轮胎时、或者将本车vh的悬架更换为与存储了初始高度时不同的悬架时等,可能产生高度偏移。
[0048]
因此,估计部46基于后述的调整处理,实施估计雷达装置2的装置高度以及高度偏移量的功能。估计部46通过调整处理实现这些功能。装置高度是指搭载于本车vh的雷达装置2的高度,是距路面的高度。高度偏移是指在垂直方向上,在雷达装置2的位置产生了从预先决定的高度亦即初始高度起的偏移的状态。高度偏移量以距离表示这样的高度偏移的大小。
[0049]
这里,对本车vh的坐标轴和雷达装置2的坐标轴进行说明。如图2以及图3所示,本车vh的坐标轴是指沿铅锤方向延伸的轴亦即垂直轴zc、沿水平方向延伸的轴亦即水平轴yc、以及沿本车vh的行进方向延伸的行进方向轴xc。垂直轴zc、水平轴yc以及行进方向轴xc相互正交。
[0050]
另一方面,如图5所示,雷达装置2的坐标轴是指在雷达装置2安装于本车vh的状态下,沿雷达装置2的上下延伸的上下轴zs、沿雷达装置2的左右延伸的左右轴ys、以及沿雷达装置2的前后延伸的前后轴xs。上下轴zs、左右轴ys以及前后轴xs相互正交。装置系坐标是指基于雷达装置2的坐标轴示出的坐标。
[0051]
在本车vh的前方设置雷达装置2的本实施方式中,前后轴xs与中心轴ca相等。换句话说,高度偏移量相当于行进方向轴xc与雷达装置2的前后轴xs之间的垂直方向的距离。
[0052]
[1-2-1.调整处理]
[0053]
使用图6的流程图对估计部46执行的调整处理进行说明。以接通了点火开关为契机开始本处理。
[0054]
若本处理启动,则估计部46在s10中,从雷达装置2获取上述的反射点信息。如上述那样,反射点信息是关于通过搭载于本车vh的雷达装置2检测出的多个反射点中的每个反射点的信息,至少包含作为方位角的水平角度以及垂直角度、和从雷达装置2到反射点为止的距离。以下,将根据反射点信息确定的反射点称为获取反射点。另外,估计部46从车载传感器组3获取包含本车速cm的各种检测结果。
[0055]
估计部46在s20中,执行路面反射提取处理。路面反射提取处理是用于从获取反射点中提取路面上的反射点亦即路面反射点的处理。路面反射点是指通过在路面的反射而检测出的至少一个反射点。后述路面反射提取处理的详细。
[0056]
估计部46在s30中,执行计算处理。计算处理是至少基于路面反射点距离,以算术的方式估计装置高度的处理。路面反射点距离是指从雷达装置2到路面反射点为止的距离。
[0057]
估计部46在s40中,确定高度偏移量。在本实施方式中,高度偏移量是指在s30中估计出的装置高度与初始高度之差。估计部46将确定出的高度偏移量存储于存储器42。
[0058]
估计部46在s50中,基于在s30中估计出的高度偏移量,判断是否需要基于搭载高度调整装置52的调整。具体而言,估计部46在高度偏移量在预先决定的距离亦即阈值距离以上的情况下,判断为需要调整。换句话说,阈值距离表示需要基于搭载高度调整装置52的调整的垂直方向上的雷达装置2的偏移量。阈值距离也可以预先存储于存储器42。
[0059]
估计部46在高度偏移量小于阈值距离而不需要调整的情况下使处理移至s90,在高度偏移量在阈值距离以上而需要调整的情况下使处理移至s60。
[0060]
估计部46在s60中,判断在s40中估计出的高度偏移量是否在搭载高度调整装置52的可调整范围内。估计部46在s40中估计出的高度偏移量在可调整范围内的情况下使处理移至s70,在不在可调整范围内的情况下使处理移至s80。可调整范围也可以预先存储于存储器42。
[0061]
估计部46在s70中,通过搭载高度调整装置52,将装置高度调整在s40中估计出的高度偏移量。换句话说,估计部46使雷达装置2以雷达装置2的前后轴xs为中心在车高方向上下移动高度偏移量,来调整装置高度。然后,估计部46结束调整处理。
[0062]
此外,估计部46也可以在与本调整处理不同的处理中,计算在s10中获取的反射点的位置坐标,并使计算出的位置坐标中的高度增减在s40中估计出的高度偏移量,来进行位置坐标的修正。然后,识别部45也可以基于修正后的反射点的位置坐标,执行上述的物标识别。
[0063]
估计部46在s80中,将表示在雷达装置2产生高度偏移的诊断信息输出给估计部46的外部装置。以下,将表示在雷达装置2产生高度偏移的诊断信息称为高度偏移诊断。外部装置也可以是通知装置51。估计部46例如也可以对通知装置51输出高度偏移诊断。通知装置51也可以根据高度偏移诊断输出警告音。
[0064]
估计部46在s90中,判断点火开关是否断开。这里,估计部46在点火开关未断开的情况下使处理移至s10。另一方面,估计部46在点火开关断开的情况下,至此结束本调整处理。
[0065]
[1-2-2.路面反射提取处理]
[0066]
接下来,使用图7的流程图对估计部46在调整处理的s20中执行的路面反射提取处理进行说明。
[0067]
估计部46在s100中,从车载传感器组3获取基于各种传感器的本车vh的状态等检测结果。这里所说的检测结果能够包含本车vh的车速、加速度、横摆角等。
[0068]
估计部46在s110中,基于从车载传感器组3获取的本车vh的状态等检测结果,判断是否提取路面反射点。
[0069]
具体而言,估计部46基于本车vh的状态等检测结果判断本车vh的车体相对于路面是否稳定,在本车vh的车体相对于路面稳定的状态的情况下,判断为提取路面反射点。
[0070]
本车vh的车体相对于路面稳定的状态可以是本车vh的车体相对于路面不倾斜的状态、本车vh的车体相对于路面不上下移动的状态。换句话说,本车vh的车体相对于路面稳定的状态可以是不在曲率较大的弯道上行驶的状态、不在凹凸较大的路面上行驶的状态。
[0071]
这里,不在凹凸较大的路面上行驶时可以说是在平坦的路面上行驶时。该情况下,考虑与在凹凸较大的路面上行驶时相比,速度以及加速度较大。另一方面,不在曲率较大的弯道上行驶时可以说是接近在直线道路上行驶的状态时。该情况下,速度以及加速度比在曲率较大的弯道上行驶时大,横摆角的变化速度比在曲率较大的弯道上行驶时小的情况较多。
[0072]
因此,估计部46也可以在本车vh的车速在预先决定的车速阈值以上的情况下,判断为处于本车vh的车体相对于路面稳定的状态,判断为提取路面反射点。换句话说,估计部46也可以在本车vh的车速小于车速阈值的情况下,判断为处于本车vh的车体相对于路面不稳定的状态,判断为不提取路面反射点。
[0073]
同样地,估计部46也可以在本车vh的加速度在预先决定的加速度阈值以上的情况下,判断为处于本车vh的车体相对于路面稳定的状态,判断为提取路面反射点。另外,同样地,估计部46也可以在本车vh的横摆角的变化速度小于预先决定的阈值的情况下,判断为处于本车vh的车体相对于路面稳定的状态,判断为提取路面反射点。
[0074]
估计部46在判断为提取路面反射点的情况下使处理移至s120,在判断为不提取路面反射点的情况下使处理移至s180。
[0075]
估计部46在s120中,从全部的获取反射点中选择一个获取反射点。估计部46对选择的获取反射点(以下,仅称为获取反射点),执行s130-s195的处理。
[0076]
估计部46在s130中,判断获取反射点是否位于在水平方向上包含中心轴ca的规定的方位范围亦即提取范围内。估计部46在获取反射点位于该方位范围内的情况下使处理移至s140,在选择的获取反射点不位于该方位范围内的情况下使处理移至s190。
[0077]
换句话说,估计部46从多个获取反射点中提取位于提取范围内的获取反射点。提取范围例如可以规定为在水平方向上包含中心轴ca的
±
几
°
-几十
°
的范围。换句话说,在本车vh的前方设置雷达装置2的本实施方式中,提取范围被规定为本车vh的行进方向附近的规定的范围。也可以通过实验等预先决定提取范围。提取范围预先存储于存储器42。
[0078]
估计部46在s140中,判断选择的获取反射点的距雷达装置2的距离是否小于规定的距离阈值。估计部46在选择的获取反射点的距离小于距离阈值的情况下使处理移至s150,在选择的获取反射点的距离在距离阈值以上的情况下使处理移至s190。
[0079]
换句话说,估计部46提取距雷达装置2的距离小于距离阈值的获取反射点。距离阈值预先存储于存储器42。
[0080]
估计部46在s150中,判断获取反射点是否是静止反射点。估计部46在获取反射点为静止反射点的情况下使处理移至s160,在获取反射点不为静止反射点的情况下使处理移至s190。静止反射点是指由静止物反射了雷达波的反射点。
[0081]
换句话说,估计部46提取获取反射点中的静止反射点。具体而言,估计部46可以使用在s10中获取的本车速cm,将反射点信息所包含的相对速度设为q,将预先设定的下限的速度阈值设为ε1,将上限的速度阈值设为ε2,提取满足ε1≤q/cm<ε2的获取反射点作为静止反射点。即,可以提取本车速cm相对于相对速度q之比在ε1以上且小于ε2的预先决定的速度阈值范围内的获取反射点作为静止反射点。
[0082]
在从静止反射点朝向雷达装置2的方向与波束方向一致的情况下,该本车速cm与反射点的相对速度q为相同的大小,并且相对速度q的方向与本车速cm相反,所以q/cm=-1。这样,考虑q/cm=-1的反射点为静止反射点。
[0083]
但是,从车载传感器组3获取的本车速cm由于车轮的打滑等而不一定与实际的车速一致。另外,由雷达装置2检测出的相对速度q也包含有误差。因此,有时即使是静止反射点,也不一定成为q/cm=-1。下限的速度阈值ε1以及上限的速度阈值ε2也可以使用考虑这些影响而适当地设定的值。
[0084]
估计部46在s160中,判断获取反射点的反射功率是否小于预先决定的功率阈值。估计部46在获取反射点的反射功率小于功率阈值的情况下使处理移至s170,在获取反射点的反射功率在功率阈值以上的情况下使处理移至s190。
[0085]
换句话说,估计部46提取反射功率小于功率阈值的获取反射点。考虑来自路面的
反射功率例如比来自其它的车辆的反射功率小。可以基于这样的来自路面的反射功率适当地规定功率阈值。例如也可以通过实验等预先决定功率阈值。功率阈值预先存储于存储器42。
[0086]
估计部46在s170中,判断获取反射点在相机的拍摄图像中是否被识别为路面。估计部46在获取反射点在拍摄图像中被估计为路面的情况下使处理移至s180,在获取反射点在拍摄图像中不被估计为路面的情况下使处理移至s195。
[0087]
换句话说,估计部46提取在拍摄图像中被识别为路面的获取反射点。此外,估计部46也可以被构成为在与本调整处理不同的处理中,获取相机的拍摄图像,并估计在拍摄图像中识别为路面的方位范围。
[0088]
估计部46在s180中,将获取反射点判断为路面反射点,将该获取反射点的三维坐标作为路面反射点存储于存储器42,并使处理移至s195。
[0089]
估计部46在s190中,将获取反射点判断为不是路面反射点,不存储到存储器42,并使处理移至s195。
[0090]
估计部46在s195中,判断是否对全部的获取反射点结束了是否为路面反射点的确认。这里,估计部46在未结束确认的情况下使处理移至s110,并反复s110-s195的处理。另一方面,估计部46在结束了确认的情况下,结束本路面反射提取处理。
[0091]
换句话说,在本实施方式的路面提取处理中,提取获取反射点中满足以下的(a)-(d)全部的获取反射点,作为路面反射点。
[0092]
(a)位于在水平方向上包含中心轴ca的提取范围内。
[0093]
(b)距雷达装置2的距离小于距离阈值。
[0094]
(c)为静止反射点。
[0095]
(d)反射功率小于功率阈值。
[0096]
(e)在相机的拍摄图像中被识别为路面。
[0097]
此外,路面反射提取处理也可以被构成为满足上述(a)-(e)中的至少(a)。换句话说,路面反射提取处理也可以被构成为满足(a)并且进一步满足(b)-(e)中的至少一个。或者,路面反射提取处理也可以被构成为至少满足(a)以及(b)。换句话说,也可以被构成为路面反射提取处理满足(a)以及(b),路面反射提取处理还满足(c)-(e)中的至少一个。
[0098]
[1-2-3.计算处理]
[0099]
接下来,使用图8的流程图对估计部46在调整处理的s30中执行的计算处理进行说明。
[0100]
估计部46在s210中,针对在s20中确定出的至少一个路面反射点,基于反射点信息,获取到路面反射点为止的距离、和作为路面反射点的方位角的垂直角度θ
ver
。
[0101]
估计部46在s220中,将要估计的雷达装置2的高度(即,装置高度)作为未知参数h,计算该未知参数h。如图9所示,基于路面反射距离r和垂直角度θ,以下述式(1)表示未知参数h。
[0102]
[数学式1]
[0103]
h=r
×
sinθver
…
(1)
[0104]
估计部46在s230中,估计在s220中计算出的未知参数h作为装置高度。此外,估计部46在路面反射点为多个的情况下,也可以按照每个路面反射点计算未知参数h,并将它们
的平均值估计为装置高度。估计部46将像这样估计出的装置高度存储于存储器42,至此结束本计算处理。
[0105]
[1-3.效果]
[0106]
(1a)信号处理部4在s30中,至少基于路面反射点距离,估计搭载于本车vh的雷达装置2的高度亦即装置高度。其结果是,能够不与其它车辆进行通信,而仅通过本车vh来估计装置高度。另外,能够仅通过本车vh来估计高度偏移。
[0107]
(1b)信号处理部4在s30中,也可以将装置高度作为未知参数h,基于在该未知参数h、路面反射点距离r以及垂直角度θ
ver
之间成立的关系式亦即式(1),计算未知参数h亦即装置高度。其结果是,能够基于关系式精度良好地计算装置高度。
[0108]
(1c)信号处理部4在s40中,也可以将在s30中估计出的装置高度与初始高度之差估计为高度偏移量。其结果是,能够仅通过本车vh来估计高度偏移量。
[0109]
[2.第二实施方式]
[0110]
[2-1.构成]
[0111]
第二实施方式的基本的构成与第一实施方式相同,所以以下对不同点进行说明。此外,与第一实施方式相同的附图标记表示相同的构成,参照先行的说明。
[0112]
在上述的第一实施方式中,信号处理部4基于式(1)以算术的方式估计装置高度。与此相对,在第二实施方式中,信号处理部4在基于后述的对应信息以统计的方式估计装置高度这一点,与第一实施方式不同。
[0113]
[2-2.处理]
[0114]
[2-2-1.调整处理]
[0115]
接下来,使用图10的流程图对第二实施方式的信号处理部4(即,估计部46)代替第一实施方式的调整处理(即,图6)而执行的第二实施方式的调整处理进行说明。伴随上述的不同点,在第二实施方式的信号处理部4执行的高度偏移量估计处理中,图6所示的s30、s40置换为图10所示的s35、s42,并在图10中追加s37。此外,图10中的s10-s20、s50-s90的处理与图6中的s10-s20、s50-s90的处理相同,所以简化一部分说明。
[0116]
估计部46对s10-s20执行与图6中的s10-s20相同的处理。
[0117]
估计部46在接着s20的s35中,执行提取频率处理。提取处理是按照每个路面反射点生成后述的提取频率,并使用提取频率估计装置高度的处理。估计出的装置高度存储于存储器42。此外,在提取频率处理中,对执行了提取频率处理的次数(以下,提取次数)k进行计数,并存储于存储器42。
[0118]
估计部46在接下来的s37中,判断提取次数k是否在预先决定的提取阈值以上。这里,估计部46在判断为提取次数k在提取阈值以上的情况下使处理移至s42。另一方面,估计部46在判断为提取次数k小于提取阈值的情况下,使处理移至s10,反复s10-s37的处理。
[0119]
估计部46在s42中,确定高度偏移量。在第二实施方式中,高度偏移量是指在s35中估计出的装置高度与初始高度之差。估计部46将确定出的高度偏移量存储于存储器42。
[0120]
估计部46对接下来的s50-s90执行与图6所示的s50-s90相同的处理。
[0121]
[2-2-2.提取频率处理]
[0122]
接下来,使用图11的流程图对估计部46在调整处理的s35中执行的提取频率处理进行说明。
[0123]
估计部46在s310中,获取路面反射点的装置系坐标(xs,ys,zs)。估计部46也可以被构成为在与调整处理不同的处理中,至少针对路面反射点,基于反射点信息,计算该路面反射点的装置系坐标。
[0124]
估计部46在接下来的s320中,计算提取频率,并将计算出的提取频率存储于存储器42。提取频率表示按照每个路面反射点的位置将提取路面反射点的次数相加后的数值。这里所说的路面反射点的位置通过上述的装置系坐标(xs,ys,zs)中的两个元素(xs,ys)表示。换句话说,这里所说的路面反射点的位置是指表示路面的平面上的位置。以下,如p(xs,ys)那样表示这样的表示路面的平面上的位置(xs,ys)的提取频率。
[0125]
例如如图12所示,提取频率p(xs,ys)也可以按照表示路面的平面上的每个位置(xs,ys)存储于存储器42。估计部46在本步骤中,使提取频率p(xs,ys)增加1作为新的提取频率p(xs,ys),覆盖该提取频率p(xs,ys)并存储于存储器42。
[0126]
估计部46接着在s330中,判断是否对在s20中提取出的全部的路面反射点计算了提取频率p(xs,ys)。估计部46在未对全部的路面反射点计算提取频率p(xs,ys)的情况下使处理移至s310,在对全部的路面反射点计算提取频率p(xs,ys)的情况下使处理移至s340。
[0127]
估计部46在s340中,确定提取频率p(xs,ys)最大的路面反射点的位置(xs,ys)。
[0128]
估计部46接着在s350中,判断在s340中确定出的提取频率p(xs,ys)最大的路面反射点是否是一个。估计部46在提取频率p(xs,ys)最大的路面反射点为一个的情况下使处理移至s360,在提取频率p(xs,ys)最大的路面反射点为多个的情况下使处理移至s370。
[0129]
估计部46在s360、s370中,确定计算位置。计算位置是指提取频率p(xs,ys)最大的路面反射点的位置。计算位置根据雷达装置2的装置高度而成为不同的位置。一般而言,装置高度越低,计算位置成为越接近本车vh的位置。
[0130]
这里,估计部46在s360中,将在s340中确定出的提取频率p(xs,ys)最大的路面反射点的位置(xs,ys)作为计算位置存储于存储器42。
[0131]
另一方面,估计部46在s370中,也可以将在s340中确定出的多个提取频率p(xs,ys)最大的路面反射点中的最接近前后轴xs的路面反射点作为计算位置存储于存储器42。换句话说,也可以将多个路面反射点中的、在表示路面反射点的位置(xs,ys)的元素中ys最接近0的路面反射点的位置确定为计算位置。
[0132]
此外,本公开并不限定于此。例如,估计部46也可以在s370中,计算对提取频率p(xs,ys)最大的多个路面反射点的位置进行平均后的平均位置,并将该平均位置确定为计算位置。或者,估计部46也可以在s370中,在提取频率p(xs,ys)最大的路面反射点有三个以上的情况下,计算这些多个路面反射点的中央位置,并将该中央位置确定为计算位置。
[0133]
估计部46在s380中,获取对应信息。对应信息也可以预先存储于rom43。能够预先基于实验、模拟等生成对应信息。
[0134]
对应信息是指基于实验等的信息,为表示通过设置于预先决定的某个测定高度的雷达装置2以最大的频率观测到的路面的位置与此时的测定高度之间的对应的信息。测定高度能够包含有多个高度。另外,上述的路面的位置能够至少利用前后距离表示。前后距离是指距雷达装置2的前后方向上的距离。换句话说,前后距离是沿着前后轴xs的方向上的距离。在本实施方式中,以前后距离表示上述的路面的位置。对应信息的例子如图13所示。
[0135]
例如,能够通过实验,以与设置于车量vh时相同的条件,通过设置于某个测定高度
的雷达装置2,多次观测各种状态的路面。而且,能够记录以最高的频率检测为路面的位置(即,前后距离)、和此时的测定高度。针对多个测定高度进行观测,能够生成对应信息。
[0136]
估计部46在s390中,基于对应信息,确定与计算位置对应的测定高度。具体而言,基于对应信息,确定与计算位置(xs,ys)示出的前后距离亦即xs对应的测定高度。然后,估计部46将该测定高度估计为装置高度。估计部46将估计出的装置高度存储于存储器42。
[0137]
在波束方向与行进方向轴xc的方向一致的本实施方式中,能够根据路面反射点距离r和垂直角度θ
ver
,基于式(2),对计算位置(xs,ys)示出的前后距离xs进行计算。换句话说,频率提取处理可以说至少基于路面反射点距离估计装置高度。
[0138]
[数学式2]
[0139]
xs=r
×
cosθver
…
(2)
[0140]
此外,估计部46在本步骤中,使提取次数k自加1,作为新的提取次数k覆盖并存储于存储器42。以上,估计部46结束提取频率处理。
[0141]
[2-2-3.动作]
[0142]
在图14中示出表示提取频率处理的结果的例子,且为将各个路面反射点的位置(xs,ys)处的提取频率p(xs,ys)作为直方图图示的例子。图14的上段所示的例子是计算位置被确定为xa[m]的例子。该情况下,估计部46基于图13所示的对应信息,将装置高度估计为ya[m]。另外,图14的下段所示的例子是计算位置被确定为xb[m]的例子(xa>xb)。该情况下,估计部46基于图13所示的对应信息,将装置高度估计为yb[m](ya>yb)。
[0143]
[2-3.效果]
[0144]
根据以上详述的第二实施方式,实现上述的第一实施方式的效果(1a),并且起到以下的效果。
[0145]
(2a)信号处理部4在s320中,也可以生成表示按照每个路面反射点的位置将在预先决定的获取期间提取路面反射点的次数相加后的值的提取频率。获取期间相当于反复进行相当于上述提取阈值的次数的上述提取处理的期间。信号处理部4在s380中,也可以从存储器42获取对应信息。信号处理部4在s390中,也可以根据对应信息,确定与提取频率最大的路面反射点的位置亦即计算位置对应的测定高度,并将该测定高度估计为装置高度。
[0146]
其结果是,信号处理部4能够基于对应信息,以统计的方式精度良好地估计装置高度以及高度偏移量。
[0147]
(2b)估计部46在s35中,在获取了多个提取频率最大的路面反射点的位置的情况下,也可以将最接近前后轴xs的路面反射点的位置确定为计算位置。其结果是,能够基于更正确地识别为路面的路面反射点,估计装置高度。
[0148]
[2-4.变形例]
[0149]
(变形例2a)
[0150]
估计部46在s370中,也可以针对在s340中确定出的多个提取频率p(xs,ys)最大的路面反射点,将中央的位置作为计算位置并基于对应信息确定装置高度。或者,估计部46在s370中,也可以针对在s340中确定出的多个提取频率p(xs,ys)最大的路面反射点,将xs的平均值作为计算位置并基于对应信息估计装置高度。由此,能够使路面反射点的位置的偏差平均化,能够精度良好地估计装置高度。
[0151]
(变形例2b)
[0152]
估计部46在提取频率处理中,也可以不计算以二维表示的路面反射点的位置所对应的提取频率p(xs,ys),而计算以一维表示的路面反射点的位置所对应的提取频率。
[0153]
换句话说,也可以提取频率是按照每个路面反射点的位置将提取路面反射点的次数相加后的值,且路面反射点的位置是通过装置系坐标(xs,ys,zs)中的一个元素(xs)表示的位置。这里所说的位置以沿着前后轴xs的方向上的距离、即前后距离表示。以下,如p(xs)那样表示位置(xs)上的路面反射点的提取频率。
[0154]
具体而言,在本变形例中,估计部46在上述的提取频率处理中,也可以在s340中,确定提取频率p(xs)最大的路面反射点的位置(xs)。此外,在检测到多个提取频率p(xs)最大的路面反射点的情况下移至的s370中,估计部46也可以将这些多个路面反射点的位置(xs)的平均值确定为计算位置。
[0155]
在图15中示出表示提取频率处理的结果的例子,且为将各个路面反射点的位置(xs)处的提取频率p(xs)作为直方图图示的例子。图15的上段所示的例子是计算位置被确定为xa[m]的例子。该情况下,估计部46基于图13所示的对应信息,将装置高度估计为ya[m]。另外,图15的下段所示的例子是计算位置被确定为xb[m]的例子(xa>xb)。该情况下,估计部46基于图13所示的对应信息,将装置高度估计为yb[m](ya>yb)。
[0156]
[3.第三实施方式]
[0157]
[3-1.构成]
[0158]
第三实施方式的基本的构成与第一实施方式相同,所以以下对不同点进行说明。此外,与第一实施方式相同的附图标记表示相同的构成,参照先行的说明。
[0159]
第三实施方式在信号处理部4与第一实施方式相同地通过式(1)估计装置高度,并且与第二实施方式相同地基于对应信息估计装置高度,并基于这些估计结果估计最终的装置高度这一点,与第一实施方式不同。
[0160]
以下,将与第一实施方式相同地基于式(1)以算术的方式估计出的装置高度称为第一高度。另外,将与第二实施方式相同地基于对应信息以统计的方式估计出的装置高度称为第二高度。
[0161]
[3-2.处理]
[0162]
接下来,使用图16的流程图对第三实施方式的信号处理部4(即,估计部46)代替第一实施方式的调整处理(即,图6)而执行的第三实施方式的调整处理进行说明。伴随上述的不同点,在第三实施方式的信号处理部4执行的调整处理中,图6所示的s40置换为图16所示的s44,并在图16中追加s35、s37、s39。此外,图16中的s10-s30、s50-s90的处理与图6中的s10-s30、s50-s90的处理相同,图16中的s35、s37的处理与图10中的s35、s37的处理相同,所以简化一部分说明。
[0163]
估计部46对s10-s20,执行与图6中的s10-s20相同的处理。
[0164]
估计部46接着在s30中,执行与图6中的s30相同的计算处理。但是,在第三实施方式中,反复执行相当于提取阈值的次数的s30。估计部46也可以每当执行s30,则在计算处理的s230中,计算存储于存储器42的第一高度和计算出的第一高度的平均值,并将该平均值作为新的第一高度覆盖并存储于存储器42。
[0165]
估计部46在接下来的s35中,执行与图10的s35相同的提取频率处理,并使处理移至s37。但是,估计部46在s35中,也可以将估计出的装置高度作为第二高度存储于存储器
42。
[0166]
估计部46接下来在s37中,执行与图10的s37相同的处理。
[0167]
估计部46在接下来的s39中,计算在s30中估计出的第一高度、和在s35中估计出的第二高度的平均值,并将该平均值估计为最终的装置高度。估计部46也可以将该最终的装置高度存储于存储器42。
[0168]
估计部46在接下来的s44中,确定高度偏移量。在第三实施方式中,高度偏移量是指在s44中确定出的最终的装置高度与初始高度之差。估计部46也可以将估计出的高度偏移量存储于存储器42。
[0169]
估计部46对接下来的s50-s90,执行与图6的s50-s90相同的处理。
[0170]
[3-3.效果]
[0171]
(3a)估计部46在s39中,基于通过s30计算出的装置高度亦即第一高度、和通过s35确定出的装置高度亦即第二高度,估计最终的装置高度。其结果是,由于基于不同的多个方法估计装置高度,所以能够使估计出的装置高度的精度进一步提高。
[0172]
(3b)估计部46也可以在s44中估计出的高度偏移量在上述的阈值距离以上并且在上述的可调整范围外的情况下,对进行报告的通知装置51输出上述的高度偏移诊断。其结果是,能够根据基于不同的多个方法稳健地估计出的装置高度,适当地进行报告。换句话说,能够减少由于不需要的报告而给予乘客烦恼的情况。
[0173]
[3-4.变形例]
[0174]
(变形例3a)
[0175]
估计部46例如也可以与(变形例2a)相同地,在提取频率处理中的s370中,对多个提取频率p(xs,ys)最大的路面反射点,将中央的位置作为计算位置并基于对应信息估计装置高度。
[0176]
(变形例3b)
[0177]
估计部46例如也可以与(变形例2b)相同地,在提取频率处理中,基于位置(xs)处的路面反射点的提取频率p(xs)和对应信息,估计装置高度。
[0178]
(变形例3c)
[0179]
估计部46也可以在满足基于第一高度的高度偏移量不在可调整范围内(以下,称为第一报告条件)、以及基于第二高度的高度偏移量不在可调整范围内(以下,称为第二报告条件)中的至少一方的情况下,进行报告。
[0180]
该情况下,估计部46例如也可以在图16所示的s60中,判断是否满足第一报告条件以及第二报告条件中的至少一方。这里,估计部46也可以在满足第一报告条件以及第二报告条件中的至少一方的情况下,使处理移至s80,输出高度偏移诊断。另一方面,估计部46也可以在不满足第一报告条件并且不满足第二报告条件的情况下,使处理移至s70,进行搭载高度调整。
[0181]
(变形例3d)
[0182]
估计部46也可以仅在满足第一报告条件以及第二报告条件双方的情况下,进行报告。该情况下,估计部46例如也可以在图16所示的s60中,判断是否满足第一报告条件以及第二报告条件双方。这里,估计部46也可以在满足第一报告条件以及第二报告条件双方的情况下,使处理移至s80,输出高度偏移诊断。另一方面,估计部46也可以在不满足第一报告
条件以及第二报告条件中的至少一方的情况下,使处理移至s70,进行搭载高度调整。
[0183]
[4.其它的实施方式]
[0184]
以上,对本公开的实施方式进行了说明,但本公开并不限定于上述的实施方式,能够进行各种变形来实施。
[0185]
(3a)虽然在上述实施方式中,雷达装置2被设置为波束方向与本车vh的行进方向一致,但本公开并不限定于此。例如,雷达装置2也可以被设置为波束方向向垂直方向或者水平方向倾斜预先决定的角度。此外,也可以预先在存储器42存储表示波束方向的倾斜的预先决定的角度。
[0186]
(3b)也可以由通过构成被编程为执行通过计算机程序具体化的一个或者多个功能的处理器以及存储器来提供的专用计算机实现本公开所记载的信号处理部4及其方法。或者,也可以利用通过由一个以上的专用硬件逻辑电路构成处理器而提供的专用计算机实现本公开所记载的信号处理部4及其方法。或者,也可以通过由被编程为执行一个或者多个功能的处理器以及存储器与由一个以上的硬件逻辑电路构成的处理器的组合构成的一个以上的专用计算机实现本公开所记载的信号处理部4及其方法。另外,计算机程序也可以作为由计算机执行的指令,存储于计算机能够读取的非迁移有形记录介质。实现信号处理部4所包含的各部的功能的方法不需要一定包含软件,也可以使用一个或者多个硬件实现其全部的功能。
[0187]
(3c)也可以通过多个构成要素实现上述实施方式中的一个构成要素具有的多个功能,或者通过多个构成要素实现一个构成要素具有的一个功能。另外,也可以通过一个构成要素实现多个构成要素具有的多个功能,或者通过一个构成要素实现由多个构成要素实现的一个功能。另外,也可以省略上述实施方式的构成的一部分。另外,也可以对其它的上述实施方式的构成附加或者置换上述实施方式的构成的至少一部分。
[0188]
(3d)除了上述的信号处理部4之外,还能够以车辆控制系统1、用于使该信号处理部4发挥作用的程序、记录了该程序的半导体存储器等非迁移实体记录介质、高度偏移估计方法等各种方式来实现本公开。
[0189]
此外,在上述实施方式中,本车vh相当于移动体,信号处理部4相当于估计装置,存储器42相当于存储装置。另外,s10相当于作为获取部的处理,s20相当于作为提取部的处理,s30相当于作为估计部、计算部的处理,s35相当于作为估计部、确定部的处理。s39相当于作为估计部、复合部的处理,s40、s42、s44相当于作为偏移量确定部的处理,s380相当于作为对应获取部的处理。另外,高度偏移量相当于偏移量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1