用于激光雷达系统的运行方法和控制单元、激光雷达系统和设备与流程
1.本发明涉及一种用于激光雷达系统的控制单元和一种用于激光雷达系统的运行方法、一种激光雷达系统本身以及一种工作设备,该工作设备构造为具有激光雷达系统并且尤其构造为车辆。
背景技术:
2.为了进行工作设备的和尤其是车辆的环境识别,越来越多地使用所谓的激光雷达系统(lidar:light detection and ranging,光探测和测距),所述激光雷达系统构造为用于以光或者红外辐射加载视场并且检测和分析处理从视场反射的辐射,用以分析视场和探测包含在其中的对象。为了改进激光雷达系统和激光雷达方法,即为了在降低数据量和简化探测的情况下降低光源的所需功率、提高眼睛安全性和尽可能动态可选的分辨率,将所谓的线式闪光激光雷达(linien-flash-lidars)的概念和具有发射到视场中的初级光的光结构化的压缩感知激光雷达相互结合。
技术实现要素:
3.根据本发明的用于激光雷达系统的、尤其是压缩感知类型的激光雷达系统的运行方法具有如下优点:由于将固定预给定的配置用于光结构化,能够省去借助对应复杂的光调制器进行的需费事地操控的光调制。这根据本发明通过下述方式实现:提出一种用于激光雷达系统的、尤其是压缩感知类型的激光雷达系统的运行方法,在该运行方法中,
4.(i)在发送器侧将初级光以未经结构化的方式发射到视场中以照射所述视场,
5.(ii)在接收器侧来自于所述视场的光
6.(ii-1)作为次级光被接收,
7.(ii-2)通过借助预给定的、固定的、在时间上恒定的矩阵式的(matrixartig)图案的光结构化转化成经再结构化的次级光,所述经再结构化的次级光具有至少一个矩阵式的光图案,该矩阵式的光图案由列图案组成,
8.(ii-3)为了探测,分别逐列地以列图案被成像到探测器组件的所分配的共同的探测器元件上并且作为整体被探测。
9.根据本发明,借助所述措施能够省去借助对应复杂的光调制器进行设置的、需以传统方式设置的且需费事地操控的光调制器。
10.从属权利要求示出本发明的优选的扩展方案。
11.在根据本发明的运行方法的一种有利的实施例中,借助图案发生器(mustergeber)并且尤其借助预给定的、固定的、在时间上恒定的光掩模提供所基于的矩阵式的图案。
12.对次级光的证实和评估能够以不同的方式实现。
13.在根据本发明的运行方法的一种实施方式中,能够将接收到的次级光在对于所基
于的矩阵式的图案并且尤其对于提供该图案的图案发生器的透射和/或反射中再结构化成经再结构化的次级光。
14.在此尤其能够考虑,借助具有第一探测器元件的第一探测器组件探测经透射的、经再结构化的次级光,该经透射的、经再结构化的次级光构造为具有经透射的第一矩阵式的光图案,该经透射的第一矩阵式的光图案具有第一列图案。
15.附加地或者替代地能够考虑,借助具有第二探测器元件的第二探测器组件探测经反射的、经再结构化的次级光,该经反射的、经再结构化的次级光具有经反射的第二矩阵式的光图案,该经反射的第二矩阵式的光图案具有第二列图案。
16.此外,附加地或者替代地,经反射的和经透射的光图案能够在探测之后作为彼此互补的光图案单独地和/或相互结合地被评估和分析处理。
17.在借助初级光对视场照射时,也有不同的处理方式适用。
18.在根据本发明的运行方法的一种构型方式中,借助初级光对视场的照射通过具有初级光的基本上线状的光场或者线式光场(linienlichtfeld)的线式照射(linienbeleuchtung),尤其通过光场的在视场上进行采样的摆动(verschwenken)实现。
19.所述摆动在此能够通过光源的和/或偏转光学器件的摆动来实现。
20.替代地或者附加地,对此,借助初级光对视场的照射能够借助具有面状的光场或者面式光场的面式照射来实现。
21.在两种原理的情况下,能够分别以连续的方式和/或根据闪光原理实现照射。
22.根据根据本发明的运行方法的另一种延展方案特别有利的是,在照射视场时,在接收器侧为了在所基于的图案的列图案与成像到相应的探测器组件的探测器元件上的对应的列图案之间进行分配,以经协调的、受控制的和/或受调节的方式摆动所基于的图案发生器、相应的探测器组件和/或所基于的初级光学器件。因此,以受控的方式能够实现的是,将视场中的每个原图点与多个所基于的图案并且尤其与所有图案相关联地成像,以便因此关于视场中的每个原图点获得完整的空间信息。
23.在根据本发明的方法的一种优选的实施方式中,产生和/或使用成对的不同的列图案作为用于矩阵式的图案的基础。
24.尤其是,在此由连续的使用和/或借助列图案、尤其是所有列图案进行的成像,确定视场中的深度信息与所使用的各个探测器元件的明确唯一的分配。
25.在一个替代的或者附加的实施例中,对于列图案中的每个像素,求取接收到的光强度的传播时间直方图并且由此确定对于相应的列图案的深度信息。
26.为了重构深度信息,特别有利的是,用于光结构化的多个预定义的列图案具有或者形成完整的一组列图案并且尤其具有或者形成完整的正交基。
27.然而,常常也有利且足够的是,替代于此地,用于光结构化的多个预定义的列图案尤其以大约25%的比例仅具有或者形成完整的一组列图案的一部分并且尤其仅具有或者形成完整的正交基的一部分。借助该措施,在构造和提供列图案时的花费减少,更确切地说在重构深度信息时没有显著的限制。
28.根据根据本发明的方法的另一种替代的和有利的扩展方案,用于光结构化的多个预定义的初级列图案沿着列方向具有统一的或者不同的分辨率。
29.此外,本发明涉及一种用于激光雷达系统的控制单元,该控制单元设置用于在所
基于的激光雷达系统中启动、执行、能够运行、调节和/或控制根据本发明的运行方法的一种实施方式。
30.另外,本发明还涉及一种激光雷达系统本身,该激光雷达系统构造为具有发送器单元和接收器单元,该发送器单元用于产生初级光并且将初级光发射到视场中以用于视场的照射,该接收器单元用于接收、探测和分析处理来自于视场的次级光。
31.所提出的激光雷达系统设置成,以根据本发明的运行方法来使用和/或由这种类型的运行方法来控制或者调节。
32.激光雷达系统为此以有利的方式构造为具有根据本发明构型的控制单元,该控制单元在其方面设置用于控制发送器单元的和/或接收器单元的运行,并且尤其用于根据压缩感知方法生成和/或发出和/或探测和/或评估待发出的初级光和接收到的次级光。
33.在根据本发明的激光雷达系统的一种有利的实施方式中,接收器单元具有光学的图案发生器,该图案发生器设置用于,记录(aufnehmen)待接收的次级光并且根据图案发生器的矩阵式的图案对所述待接收的次级光进行再结构化,并且输出经再结构化的次级光,所述经再结构化的次级光具有用于探测的矩阵式的次级光图案。
34.在另一种优选的实施方式中,所述光学的图案发生器构造为在机械上固定预给定的光掩模,该光掩模具有在材料上对应于或者相应于矩阵式的图案的构型。
35.最后,本发明还涉及一种工作设备本身,该工作设备构造为具有根据本发明构型的激光雷达系统并且尤其构造为车辆。
附图说明
36.参考所附附图详细描述本发明的实施方式。
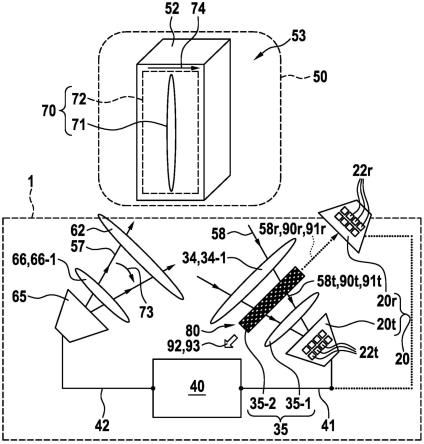
37.图1示意性地示出根据本发明构型的激光雷达系统的一种实施方式的示意图,该激光雷达系统可以与根据本发明的运行方法的相关联地应用。
38.图2示意性地阐述根据本发明的激光雷达系统的一种实施方式的如下方面,所述方面的焦点在于接收器单元中的图案发生器(mustergeber)的构型和作用方式。
39.图3示出在对反射和透射中的互补的光图案进行评估的同时对接收到的次级光进行分析处理的方面。
40.图4示意性地示出双探测器设计的细节,该双探测器设计用于同时对反射和透射中的互补的光图案进行评估。
具体实施方式
41.下面,参照图1至图4详细描述本发明的实施例和技术背景。相同的和等效的以及以相同或者等效的方式起作用的元件和部件用相同的附图标记表示。对所标记的元件和部件的详细描述并非在其每次出现时都复述。
42.所示出的特征和其他特性可以以任意形式相互分离并且任意地相互组合,而不离开本发明的核心。
43.对于激光雷达系统1,主要存在两种基本构想方案,(i)一方面即所谓的闪光系统,在所述闪光系统中,借助初级光57照射视场50的整个场景53并且随后进行并行的探测,和(ii)另一方面所谓扫描器系统,在所述扫描器系统中,通过初级光57的单个激光束对场景
53进行扫描、采样或者光栅扫描(abrastern)。
44.除了竖直闪光激光雷达(vertical-flash-lidar)等混合形式之外,迄今为止在市场上可以被普遍接受的主要是采样系统或者扫描器系统,尤其是因为在闪光系统的开发中存在很高的技术障碍。常规的或者传统的闪光系统与二维探测器一起工作,所述二维探测器以传播时间编码的方式(laufzeitkodiert)记录视场50中的场景53的完整图像。
45.一种替代的用于探测的概念是所谓的压缩感知激光雷达方案,其也被称为光子计数激光雷达方案,该压缩感知激光雷达方案基于在测量值层面上的数据压缩(datenkomprimierung或者datenkompression)并且本身例如由出处[1]至[3]已知。
[0046]
闪光系统需要高的光学功率,以便实现大的作用范围,因为所发射的光学功率分布在大的空间区域内。相反,具有点式照射的纯扫描系统常常在可达到的分辨率、扫描功能的实施以及眼睛安全性方面存在问题。
[0047]
为了规避两种变型的缺点,作为混合概念开发所谓的竖直闪光激光雷达。在此,由激光雷达传感器发出竖直线,并且因此在竖直方向上遵循闪光方案并且在水平方向上遵循扫描方案。然而,如在闪光方案中常见的那样,在此至少在一个空间方向上使用平面的、空间分辨的探测器。这种类型的探测器一方面在技术上是要求非常高的,主要是在高数量的元素、即像素方面,另一方面是成本密集的。此外,需要具有非常高的品质和热稳定性的成像光学器件,以便将背向散射的光子充分地成像到该传感器上。
[0048]
根据本发明提出的方案基于压缩感知原理并且消除这些缺点。
[0049]
图1在示意图中示出根据本发明构型的激光雷达系统1的一种实施方式,该激光雷达系统可以与根据本发明的运行方法的相关联地应用。
[0050]
激光雷达系统1具有发送器单元60,该发送器单元也可以理解为发送器光学器件,以及具有接收器单元30,该接收器单元也可以理解为接收器光学器件。
[0051]
以有利的方式构造控制单元40,发送器单元60和接收器单元30通过检测线路和控制线路41或42与该控制单元作用连接。
[0052]
发送器单元60具有用于产生并发出未经结构化的初级光57的光源单元65、用于射束成形的射束成形光学器件66以及用于使未经结构化的初级光57实际上发射到具有场景53的视场50中的偏转光学器件62,该场景能够包含例如对象52。
[0053]
接收器单元30具有初级光学器件34和次级光学器件35,该初级光学器件例如是按照镜头的类型,该次级光学器件例如具有接收器侧的聚焦光学器件35-1。
[0054]
接收器单元30的、尤其是次级光学器件35的根据本发明的核心组成部分是布置在初级光学器件34与接收器侧的聚焦光学器件35-1之间的图案发生器35-2,设置该图案发生器并且该图案发生器具有器件,所述器件将从视场50中接收到的次级光58在透射中和/或在反射中借助具有列图案81的矩阵式的图案80一方面通过透射并且另一方面通过反射/吸收再结构化成经透射的矩阵式的光图案90t或经反射的矩阵式的光图案90r,所述列图案布置在所基于的矩阵80
‘
的行方向82上,所述经透射的矩阵式的光图案或所述经反射的矩阵式的光图案具有相应的列图案91t或91r。
[0055]
接收器单元30的初级光学器件34和次级光学器件35还用于,将从视场50中接收到的且此后经结构化的次级光58r、58t成像到探测器组件20上,即该探测器组件具有用于在反射中或在透射中进行探测的子探测器20r、20t,该探测器组件具有多个传感器元件22r、
22t或者探测器元件。
[0056]
通过证实来自于视场50的经再结构化的次级光58r、58t(所述次级光具有经成像的矩阵式的次级光图案90r、90t,所述光图案具有对应的列图案91r、91t),能够在与探测器组件20和控制与分析处理单元40的共同作用下尤其按照压缩感知方法的类型对激光雷达系统1的视场50进行检测和评估。
[0057]
在此,在激光雷达系统1运行时,根据本发明在接收器侧通过借助预给定的固定的且在时间上恒定的矩阵式的图案80——所述矩阵式的图案尤其是接收器单元30的次级光学器件35的所基于的图案发生器35-2的、由预定义且在时间上恒定的列图案81构成的矩阵式的图案——对接收到的未经结构化的初级光58进行再结构化,由未经结构化的初级光58在图案发生器35-3上的反射和/或透射中产生一个或者两个矩阵式的光图案90r、90t并且将其提供给相应的探测器组件20r、20t,所述探测器组件具有探测器元件22r、22t。
[0058]
另外,根据本发明在接收器侧在探测和分析处理时,分别从视场50中接收来自于视场50的经再结构化的次级光58r、58t作为相应的次级列图案91r、91t,为了探测将其成像到相应的探测器组件20r、20t的所分配的共同的探测器元件22r、22t上并且作为整体被探测。
[0059]
即,对未经结构化的次级光58的结构化在接收器单元中在次级光学器件35中在穿过聚焦光学器件35-1之前且在使用接收器侧的图案发生器35-2的情况下实现,所述接收器侧的图案发生器也能够理解为图案元件,并且用于例如通过空间遮盖或者释放或反射将穿过次级光学器件35的图案发生器35-2的视场垂直于光的传播方向在空间上再结构化,以便由此构成经再结构化的次级光58r、58t并且将其提供给探测器组件20。
[0060]
为此,图案发生器35-2具有预给定的、固定的且在时间上恒定的配置,该配置按照用于构造具有列图案81的矩阵式的图案80的矩阵80
‘
的类型,所述列图案在行方向82上、即在行的延伸方向上在所基于的矩阵80
‘
中依次排列(aneinandergereiht)。
[0061]
通过矩阵80
‘
的结构,对应地实现在反射或透射中的相应的次级的矩阵式的光图案90r和90t的构造,所述相应的矩阵式的次级光图案具有对应的亮区域96或者亮像素和暗区域97或者暗像素。
[0062]
借助未经结构化的初级光57对视场50进行的照射能够以不同的方式实施,即尤其具有以不同方式构型的光场70。
[0063]
例如能够考虑使用线式光场71,同时通过发送器单元60的或者发送器单元60中的对应的摆动运动73对视场50中的光场70、71进行扫描74。
[0064]
通过借助偏转光学器件62和所成像的光图案90r、90t的和/或所基于的矩阵80
‘
、90
‘
的尤其对应于图案发送器35-2的图案80中的行方向82、92的、在发送器侧的摆动运动73进行的成像,将光场70随着对应的摆动运动或者扫描74的运动投(geworfen)到视场50中。
[0065]
即,发送器侧的摆动运动73引起对视场50中的光场70的扫描74。
[0066]
替代地,在无发送器侧的摆动运动73的情况下能够借助面式光场72实现对视场50的曝光。
[0067]
在这种情况下,所成像的光图案90r、90t的和/或所基于的矩阵80
‘
、90
‘
的尤其沿着图案发送器35-2的所基于的图案80的行方向82、92的对应的在接收器侧的摆动运动73能够有助于实现各个列图案91r、91t与共同的探测器元件的对应的成像比例。
[0068]
根据本发明,能够与探测器组件20、20r、20t相关联地使用相对更简单的光电探测器,该光电探测器尤其具有更少数量的单个的探测器元件22r、22t,所述单个的探测器元件也能够被称为像素。
[0069]
此外,在本发明中,相应的成像光学器件能够减少为更有利的透镜系统。
[0070]
另外可能的是,在测量过程期间直接压缩所记录的数据——因此被称为压缩感知——由此尤其能够剧烈地减少光传感器20与处理逻辑40之间的数据率,例如用于激光雷达系统1的转子与定子之间的通信。
[0071]
在此,根据本发明还避免迄今为止的压缩感知系统的缺点,即需要光调制器和对该光调制器的操控,例如在需要尽可能短的切换时间的空间光调制器的意义上。
[0072]
如上所述,这根据本发明通过下述方式实现:为了对未经结构化的次级光58进行结构化,使用具有预给定的、固定的、在时间上恒定的配置的、接收器侧的图案发生器35-2,该配置按照用于构造具有列图案81的初级图案80的矩阵80
‘
的类型。
[0073]
根据本发明,由此尤其省去进行结构化的元件的易变性的必要性和为此所需的操控机构。
[0074]
传统上所必需的调制器迄今为止几乎是负担不起的,和/或在可使用性方面具有强烈的限制。
[0075]
例如,最快速的可获得的调制器典型地具有为32khz的最大切换频率,由此可能的图像重复率受到强烈限制。此外,这种类型的部件常常是昂贵的且不符合汽车领域中的要求。
[0076]
即,本发明的核心在于,提供一种压缩感知方案,该压缩感知方案在不具有传统意义上的光调制器的情况下、即例如在不具有空间光调制器的情况下也能够应对(auskommen)。
[0077]
在此,在接收器侧提供恒定的图案80,通过该恒定的图案将最初未经结构化的次级光58在使用图案80的情况下在图案发生器35-2上的反射和/或透射中再结构化成具有光图案90r、90t的经再结构化的初级光58r、58t。
[0078]
必要时,能够借助发送器侧的扫描运动73实现线式光场71在视场50中的场景53上例如在水平方向上的扫描。
[0079]
根据本发明,具有矩阵式的光图案90r、90t的经再结构化的次级光58r、58t的各个列图案91r、91t在此分别成像到相应的探测器组件20r或20t的共同的探测器像素22r或22t上。
[0080]
借助足够多的列图案81对列进行的连续的照射和分析处理,能够实现将深度信息明确唯一地分配给各个像素。
[0081]
压缩感知系统或者cs(compressed-sensing)系统1基本上由三个部件组成,即脉冲的或者经调制的光源65、用于将初级光57结构化的元件66-2和一维的或者1d(dimension)探测器20。
[0082]
为了将光57结构化,传统上使用所谓的数字光调制器或者dlm。替代地,该构件传统上也能够实现为lcd显示器,然而由此减少透射和/或信号增益。
[0083]
现在,本发明的核心在于,替代传统上所使用的用于动态图案产生的机构,即尤其通过接收器侧的静止的图案发生器35-2来替代,该接收器侧的静止的图案发生器根据本发
明设置用于,为了将未经再结构化的次级光58结构化以便作为反射中的经再结构化的次级光58r或在透射中的经再结构化的次级光58t,提供预给定的、固定的、在时间上恒定的配置,该配置按照用于构造具有矩阵式的光图案90r、90t的图案80的矩阵80
‘
的类型,所述光图案分别具有列图案91r、90t。
[0084]
根据本发明,由此尤其省去进行结构化的元件的易变性的必要性和为此所需的操控机构。
[0085]
通过将次级光58的区域中的光场进行结构化,能够在光束上印制二进制图案,即“有光”和“无光”。
[0086]
在用于根据本发明的cs系统的典型的变型中,作为次级光58的经背向散射的光借助凸透镜或者一般借助接收器单元30中的初级光学器件34接收并且在次级光学器件35的图案发生器35-2中的再结构化之后在探测器组件20、20r、20t的一维的或者1d光电探测器中测量。
[0087]
探测器元件或者光电探测器能够例如是成本有利的雪崩光电二极管(apd),所述雪崩光电二极管在允许快速的测量时间的同时允许高灵敏度。在此,所使用的光电二极管作为探测器组件20、20r、20t的探测器元件22r、22t在此记录所接收到的光子的完整的直方图。
[0088]
为了能够由此重构视场50中的场景53,需要借助完整的一组在图案80的列图案81的意义上的结构化来探测场景53。
[0089]
完整在此表示在完整的正交基的意义上的完整,例如在所谓的阿达玛矩阵(hadamardmatrizen)的基础上。
[0090]
具有接收器侧的光结构化的方法的优点在于,能够利用光源65的全部功率以照射视场50中的场景53。在发送器侧的光结构化的情况下,通常由于单个的像素的隐没(ausblendung),光功率的大约50%作为功率损耗丢失。
[0091]
如上所述,在根据本发明的具有对次级光58的在接收器侧的光过滤或者再结构化的压缩感知器系统1的情况下,对所基于的光源65的射束品质的要求降低,因为初级光57的射束能够明显更大,以便例如同时照射接收器侧的多个列。后者能够将更简单的、更成本有利的镜头用于接收器单元30的初级光学器件34并且能够在眼睛安全性的意义上实现更高的最大激光功率。在此,伴随着后者出现增加的作用范围。
[0092]
在此,本发明的一方面在于提供或者使用光学掩膜作为接收器单元35的次级光学器件35中的图案发生器35-2,该光学掩膜能够引入到成像光学器件34的图像层面中。
[0093]
掩膜35-2在此构型为使得该掩膜由相同大小的元素组成,所述元素作为像素86、87能够理解为是透射的或者进行阻挡/反射的,即要么是透光的、要么是进行吸收/反射的。
[0094]
图2和图4为此示范性地并且以示意性的方式示出根据本发明的激光雷达系统1的一种实施方式的如下方面,所述方面的焦点在于接收器单元30中的图案发生器35-2的构型和作用方式。
[0095]
图案80的元素86、87的布置总体上在此对应于列图案81,所述列图案对于在压缩感知方案的意义上的重构是必需的。理想地、但并不一定地,列图案81在图案发生器35-2的所基于的图案80中以其自然次序排列,例如按照上升的频率排列。
[0096]
对于在压缩感知方案的意义上的重构必需的是,对于所基于的图案80的每个列图
案,关于次级光图案的对应的列图案91r、91t的信号在透射中作为图案被测量,以及在反射中作为互补的图案或者反图案被测量。
[0097]
然后,对应地能够由两个信号的差确定用于重构的系数,如结合图3示出的那样。
[0098]
在本发明的一种有利的实施方案中,这能够通过作为图案发生器35-2的镜掩膜在如下方面充分利用,即分离的射束58r、58t同时成像到两个探测器单元20r、20t上,如结合图4示出的那样。
[0099]
图4为此示意性地示出双探测器设计的细节,该双探测器用于同时评估经再结构化的次级光58r和58t在反射或在透射中的互补的光图案90r和90t。
[0100]
因此,能够同时测量对应的两个信号,并且能够进一步减少所基于的图案80中的必需的列图案81的数量。
[0101]
出处
[0102]
[1]howland等,“photon-counting compressive sensing laser radar for 3d imaging”,应用光学(applied optics)50(31),2011年11月。
[0103]
[2]howland等,“photon counting compressive depth mapping”,光学快讯(optics express)21(20)中,2013年9月。
[0104]
[3]edgar等,“real-time computational photon-counting lidar”,光学工程(optical engineering)57(3)中,2018年3月。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1