用于产生测量信号的装置的制作方法
用于产生测量信号的装置
1.本发明涉及用于测量围绕旋转轴线的旋转角度的装置以及包括该装置的交通工具。
2.根据权利要求1的前序部分的用于测量被施加在围绕旋转轴线的扭转轴上的扭矩的装置是从ep 1 870 684 a1已知的。在该已知的装置中,第一传感器元件用于检测扭矩并且第二传感器元件用于故障确定。该故障确定通过已知的过程进行,在该已知的过程中,例如,两个传感器元件的输出被在时间序列中比较,并且,当具有输出之间的显著的差异时,确定显示出在该显著的差异之前和之后的不稳定的输出改变的传感器元件在故障条件中。
3.本发明的一个目的是改进该装置。
4.该目的被独立权利要求的特征解决。有利的实施方式是从属权利要求的主题。
5.根据本发明的一个方面,一种用于产生测量信号的装置,所述测量信号取决于被施加在围绕旋转轴线的扭转轴上的扭矩,所述装置包括磁体环,磁体环固定至扭转轴的第一轴向位置并且具有预定义的数目的用于产生磁场的磁极。装置的特征在于具有磁体传感器,磁体传感器固定至扭转轴的与第一轴向位置不同的第二轴向位置并且包括第一传感器元件,位于围绕旋转轴线的径向平面中并且输出取决于到达第一传感器元件的磁场的第一传感器信号;以及第二传感器元件,位于第一传感器元件的径向平面中但是与第一传感器元件间隔小于两个相邻的磁极的周向延伸部的距离,并且输出取决于到达第二传感器元件的磁场的第二传感器信号。装置还包括评价系统,适配为基于第二传感器信号从第一传感器信号过滤杂散场信号分量并且适配为基于已过滤的第一传感器信号输出测量信号。
6.第一传感器元件优选地适配为在笛卡尔坐标中测量到达第一传感器元件的磁场。此外,第二传感器元件优选地适配为在笛卡尔坐标中测量到达第二传感器元件的磁场。
7.该装置是基于以下构思,即在开始提到的装置中,第二传感器元件仅能够用于通过相对于第二传感器信号校正第一传感器元件输出的第一传感器信号监视第一传感器元件的正确的功能性。然而,当传感器元件被排列在共用的磁体传感器中并且被靠近地定位在一起时,产生被叠加在磁体环的磁场上的干扰场,第一传感器信号和第二传感器信号将几乎具有在第一传感器信号和第二传感器信号中的相同的量并且因此能够被滤除。干扰场的影响因此能够被减少99%,这,例如在转向控制环路中,显著地稳定化测量信号的后处理。
8.在所提供的装置的实施方式中,磁体环的外周的半径r
编码器
和传感器元件的从旋转轴线看到的并且在下文被称为的位移角满足方程其中a是在0.3和3之间的值。在a的所提供的范围内,磁体环的表面在一个方面看上去是对于磁体传感器平坦的,但是确保不同的传感器元件获得独立的磁性测量,使滤除上文描述的干扰场成为可能。值a可以优选地被设置为2。
9.在所提供的装置的进一步的实施方式中,每个传感器元件距旋转轴线的距离为r
编码器
的3%和15%之间,优选地为7%。在该距离范围内,磁体环的磁场足够地不受干扰,使扭转元件的精确的检测扭转成为可能。
10.在所提供的装置的优选的实施方式中,第二传感器元件被与第一传感器元件在周向上间隔。基本上,第二传感器元件可以被随机地布置在围绕第一传感器元件的径向平面上。然而,当将第二传感器元件定位为与第一传感器元件在周向上间隔时,磁体环能够被非常简单地设计结构。
11.在所提供的装置的进一步的实施方式中,磁体传感器还包括第三传感器元件以及第四传感器元件,第三传感器元件被在周向上定位在并且被与第一传感器元件在轴向上间隔并且输出取决于到达第三传感器元件的磁场的第三传感器信号,第四传感器元件被在周向上定位在第二传感器元件,被在轴向上定位在第三传感器元件并且输出取决于到达第三传感器元件的磁场的第四传感器信号,并且其中周向距离小于一个磁极的周向延伸部的一半。通过这种手段,干扰场能够被从传感器信号消除。当通过产生第一传感器信号和第四传感器信号的差和第二传感器信号和第三传感器信号的差之间的商数从第一传感器信号过滤杂散场信号分量时,这能够最容易地被实现。
12.在所提供的装置的又另一个实施方式中,周向距离是一个磁极的周向延伸部的三分之一。
13.根据本发明的另一个方面,一种交通工具,包括在驾驶方向可运动的底盘、在以驾驶方向看到的后侧可运动地承载底盘的两个后轮、在以驾驶方向看到的前侧可运动地承载底盘的两个前轮、用于将转向柱围绕旋转轴线转动以将前轮转向的方向盘、以及用于测量转向柱的围绕旋转轴线的旋转角度的上文提供的装置中的一个。
14.本发明的上文描述的特点、特征和优点以及它们如何实现的方式将基于下文的实施方式的描述得到进一步的理解,实施方式将参考附图更详细地解释。附图示出了:
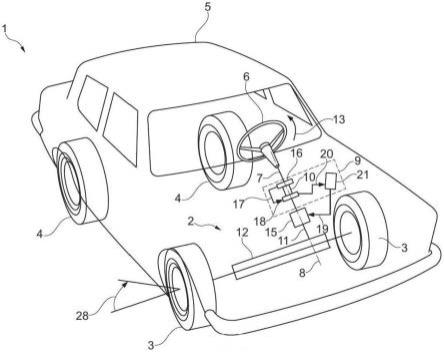
15.图1是汽车的示意性的原理的透视图,
16.图2是用于测量围绕图1的汽车中的旋转轴线的旋转角度的装置的示意性的原理的剖视图,
17.图3是根据本发明的第一实施方式的图2的装置中的磁体环和具有传感器的集成电路的剖视图,
18.图4是图3的装置中的磁体环和集成电路的俯视图,
19.图5是图5和6的部分的在以第一排列的测量环境中的俯视图,
20.图6是图5和6的部分的在以第二排列的测量环境中的俯视图,
21.图7是图5和6的部分的在以第三排列的测量环境中的俯视图,
22.图8是图5和6的部分的在以第四排列的测量环境中的俯视图,
23.图9是测量结果的图解。
24.在附图中,相同的技术特征被提供相同的附图标记,并且仅被描述一次。附图是纯示意性的并且具体地不反映实际的几何比例。
25.参考图1,图1是包括转向系统2的交通工具1的示意性的透视图。
26.在本实施方式中,交通工具1包括被两个前轮3和两个后轮4支撑的底盘5。前轮3可以被转向系统4以轮偏转角28转动,使得交通工具1能够被在曲线中驾驶。
27.转向系统2包括安装在第一转向轴7上的方向盘6,第一转向轴7进而被安装从而能够围绕旋转轴线8旋转。第一转向轴7被引导入用于产生测量信号19的装置9,测量信号19取决于被施加在扭转元件10上的扭矩,第一转向轴7以未更详细地示出的方式连接至扭转元
件10。第二转向轴11在在旋转轴线8上与第一转向轴7相反的侧部连接至扭转元件10,并且连接至轮向齿轮12。如果方向盘6被以转向扭矩13转动,那么转向扭矩据此被传递至轮向齿轮12,轮向齿轮12作为响应将前轮3转向以使用轮偏转角28在曲线中驾驶。
28.转向过程可以被能够辅助第二转向轴11转动的辅助马达15支持。为了该目的,装置9检测转向扭矩13。然后,除了别的以外,辅助马达15根据检测到的转向扭矩13使用轮偏转角28将第二转向轴11转向。
29.为了检测转向扭矩13,装置9包括以磁体环16的形式的磁性发生器元件,磁体环16连接至第一转向轴7,并且感应磁场17。装置9还包括磁体传感器18,磁体传感器18连接至第二转向轴11,并且测量被磁体环16感应的磁场17,并且磁场17取决于第一转向轴7以及因此磁体环16的相对于第二转向轴11以及因此相对于磁体传感器18的相对角位置。
30.磁体传感器18将传感器信号阵列20传输至评价系统21。传感器信号阵列20将在下文更详细地描述。评价系统21接收传感器信号阵列20并且计算在其上的测量信号19,测量信号19取决于两个转向轴7、11之间的相对旋转位置并且因此取决于被施加在扭转轴10上的扭矩。该测量信号19然后用于驱动辅助马达15以基于转向扭矩13设置轮偏转角28。
31.装置现在将基于图2更详细地描述:
32.第一转向轴7被压动入围绕旋转轴线8可旋转的第一接收插座22中。第一接收插座22还包括与第一转向轴7相反的承载磁体环16的凸缘23,使得当第一转向轴7被转动时磁体环16将被围绕旋转轴线转动。与其同样地,第二转向轴11被压动入也围绕旋转轴线8可旋转的第二接收插座24中。在其中,第二接收插座24包括与第二转向轴11相反的凸缘25。承载评价系统21的保持器26附接至该凸缘25,保持器26被作为图2中的印刷电路板体现。
33.与评价系统21共同地,保持器26将磁体传感器承载在磁体环16的轴向水平27上。因为扭转轴10是围绕旋转轴线8可扭曲的,所以当磁体环16由于转向扭矩13被围绕旋转轴线8转动时,扭转轴10将由于第二转向轴11的惯性被围绕旋转轴线8扭曲,使得磁体环16将在围绕旋转轴线8的周向方向逆着磁体传感器18被相对位移。这种周向位移是上文描述的第一转向轴7相对于第二转向轴11的相对角位置。到达磁体传感器18的来自磁体环16的磁场17将取决于磁体环16和磁体传感器18之间的这种周向位移。即,周向位移指示扭转轴10的扭转以及因此转向扭矩13,并且因此能够用于产生上文描述的测量信号19。
34.上文描述的测量原理要求来自磁体环16的磁场17不受干扰地到达磁性传感器18。在现实环境中,总是具有干扰磁体环16的磁场17的外部磁场。
35.下文的描述示出了使消除外部和干扰磁场成为可能的两个实施方式。
36.在第一实施方式中,磁体环16以及磁体传感器18被以特别的形式体现并且在图3和4中示意性地指示。
37.磁体环16被在周向上分割为二十四个磁体,其中每个磁体具有北极28和在径向上附接至北极28的南极29。因此,第一实施方式中的磁体环16包括总共四十八个磁极,其中磁体环16包括8mm的完全的轴向高度30和20.5mm的半径。
38.被放置的磁体传感器18被在径向上位移1.09mm的空气缝隙32。磁体传感器18包括被在径向上和在周向上相等地放置的第一传感器元件33和第二传感器元件34。两个传感器元件33、34被在轴向上位移1.84mm的轴向位移35。在其中,传感器元件33、34距磁体环16的径向距离36是1.39mm。第一传感器元件33和第二传感器元件34具有相同的距轴向磁极边界
的轴向距离,其中第一传感器元件33在轴向上位于轴向上磁极并且第二传感器元件34在轴向上位于轴向下磁极。
39.第三传感器元件38和未示出的第四传感器元件被放置为从第一和第二传感器元件33、34以1.84mm的周向距离37在周向上位移。与第一和第二传感器元件33、34同样地,第三传感器元件38和第四传感器元件被在径向上和在周向上相等地放置。即,第三传感器元件38和第四传感器元件被在轴向上位移1.84mm的轴向位移35,并且第三传感器元件38和第四传感器元件距磁体环16的径向距离36是1.39mm。第三传感器元件38和第四传感器元件具有相同的距轴向磁极边界的轴向距离,其中第三传感器元件38在轴向上位于轴向上磁极并且第四传感器元件在轴向上位于轴向下磁极,使得第四传感器元件在图3和4的透视图中不是可见的。
40.磁体环16的到达第一传感器元件33和第三传感器元件38的磁场17可以被分频为径向分量br、周向分量b
t
和轴向分量ba。在磁体传感器18被放置的轴向位置,轴向磁场分量ba可以被视为是相对于磁体环16和磁体传感器18之间的周向位移恒定的并且因此可以被忽略。即,到达磁体传感器18的磁场17可以被视为在轴向平面中旋转的矢量。被传感器元件33、34和38中的一个测量到的磁场17的矢量的角度直接地取决于待被测量的磁体环16和磁体传感器18之间的周向位移。
41.然而,被传感器元件33、34和38中的一个测量到的磁场17的矢量的角度可以不被直接地测量,因为传感器元件33、34和38中的每个不在柱面坐标中而是在笛卡尔坐标中测量磁场。例如,传感器元件33、34和38中的每个可以被以三个霍尔发生器体现,其中每个霍尔发生器测量在一个笛卡尔空间方向的磁场17。
42.许多磁体传感器,例如在本专利申请的申请日由melexis nv出售的melexis mlx90372,使用传感器元件33、34和38中的至少两个,其被在周向上位移以比较它们的测量结果并且以过滤杂散场,尤其是干扰磁场。然而,因为传感器元件中的一个例如传感器元件33总是在周向上引导传感器元件中的另一个例如传感器元件38,所以许多用于过滤杂散场的策略的应用在磁体环16中的应用中不是可行的。
43.然而,使用上文描述的磁体传感器melexis mlx90372作为磁体传感器18的示例性的测量测试已经显示出用于过滤杂散场的策略能够被相信,当在下文被称为r
编码器
的磁体环16的半径31和从旋转轴线8看到的并且在下文被称为的第一传感器元件33和第三传感器元件38之间的位移角37满足以下的方程时:
44.(1)
45.在其中,a是在0.3和3之间的值。
46.这应该基于实验结果被展示出,其中值a已经被选择为是2。外部和干扰磁场已经使用在图5至8中示出的利用melexis mlx90372作为磁体传感器18的测试设置被通过实验消除。在其中,磁体环16和磁体传感器18,与装置9的评价系统21共同地,已经被放置在两个模拟外部和干扰磁场的赫姆霍兹线圈39之间相对于彼此静止。
47.向旋转轴线9中看到,赫姆霍兹线圈39被排列为相对于旋转轴线9点对称。为了实验相对于磁体环16静止的磁体环16和磁体传感器18共同地可围绕旋转轴线9旋转任意的旋转角度40。如果假设图5示出了在具有0
°
的旋转角度40的第一位置41中的测试设置,那么图
6示出了在具有90
°
的旋转角度40的第二位置42中的测试设置,图7示出了在具有180
°
的旋转角度40的第三位置43中的测试设置并且图8示出了在具有270
°
的旋转角度40的第四位置44中的测试设置。
48.与是否使用melexis mlx90372的杂散场滤波技术产生测量信号19或是否传感器元件33、34和38中的仅一个被使用以产生测量信号19无关,测量信号19应该总是输出相同的测量信号19,此时没有外部和干扰磁场被施加。测量信号19将仅随着旋转角度40改变,如果赫姆霍兹线圈39被启动并且将外部和干扰磁场施加至测试设置的话。
49.在测试设置的第一次运行中,测量信号19已经被随着四个不同的外部和干扰磁场产生,其中没有杂散场滤波策略被应用。如已经提到的,这能够通过考虑例如仅磁体传感器18的传感器元件33、34或38中的一个的输出被实现。
50.所得到的曲线在图9中示出。第一曲线45示出了被磁体传感器产生的测量信号19的随着旋转角度40的运行,此时外部和干扰磁场是0a/m。第二曲线46示出了被现有技术磁体传感器产生的测量信号19的随着旋转角度40的运行,此时外部和干扰磁场是1000a/m。第三曲线47示出了被现有技术磁体传感器产生的测量信号19的随着旋转角度40的运行,此时外部和干扰磁场是2500a/m,并且第四曲线48示出了被现有技术磁体传感器产生的测量信号19的随着旋转角度40的运行,此时外部和干扰磁场是4000a/m。
51.如能够从图9看到的,在没有外部和干扰磁场被施加的情况下,测量信号19持续地保持在包括常规的磁体传感器的装置的操作点49上。如果外部和干扰磁场被施加,那么测量信号19围绕操作点49振荡,而没有取决于外部和干扰磁场的强度的另外的基准振幅。
52.在测试设置的另一次运行中,测量信号19已经另外地通过使用melexis mlx90372的杂散场滤波功能被产生。在其中,测量信号19已经被随着如上文的相同的四个不同的外部和干扰磁场产生。所得到的曲线在图9中在窗口50中示出,窗口50放大图9的图解的一部分。第五曲线51示出了被磁体传感器18产生的测量信号19的随着旋转角度40的运行,此时b
dist
=0a/m。第六曲线52示出了被磁体传感器18产生的测量信号19的随着旋转角度40的运行,此时b
dist
=1000a/m。第七曲线53示出了被磁体传感器18产生的测量信号19的随着旋转角度40的运行,此时b
dist
=2500a/m,并且第八曲线54示出了被磁体传感器18产生的测量信号19的随着旋转角度40的运行,此时b
dist
=4000a/m。
53.如能够从图9看到的,在没有外部和干扰磁场被施加的情况下,被磁体传感器18产生的测量信号19持续地保持在包括磁体传感器18的装置9的操作点55上。如果外部和干扰磁场被施加,那么测量信号19围绕操作点55振荡,而没有取决于外部和干扰磁场的强度的另外的基准振幅。这些振幅小于曲线45至48的振幅高至99%。
54.使用其的测量结果显示出上文描述的实施方式减少外部和干扰磁场的影响,即使磁体传感器18的传感器元件在笛卡尔坐标中检测磁场。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1