用于确定紧急情况轨迹和用于运行自动化车辆的方法和设备与流程
1.本发明涉及一种用于确定紧急情况轨迹的方法和一种用于运行自动化车辆的方法。
技术实现要素:
2.用于确定紧急情况轨迹的根据本发明方法包括接收代表自动化车辆的路线说明的路线数据值的步骤、根据自动化车辆的路线说明确定用于自动化车辆中的每个自动化车辆的紧急情况轨迹的步骤,其中,紧急情况轨迹分别遵守在时间上和/或在地点上预给定的相对彼此的最小间距,和将紧急情况轨迹传输给自动化车辆用以运行自动化车辆的步骤。
3.自动化车辆可理解为这样的车辆:所述车辆根据sae级别1至5(见标准sae j3016)中的一个级别构造。
4.(正常和/或紧急情况)轨迹可理解为用于自动化车辆的预给定的路线,所述预给定的路线例如借助于自动化的横向控制和/或纵向控制来驶过。在一种实施方式中,轨迹代表例如离散的坐标点和/或矢量等等。
5.在此,正常轨迹尤其描绘在开始点(例如,相应的自动化车辆在确定正常轨迹的时间点的位置)和目的地之间的连接,其中,正常轨迹的确定例如通过这样的方式进行:考虑周围环境特征[交通密度、道路走向、交叉路口、其他车辆等等]。优选地,正常轨迹描绘用于自动化车辆的路线,该路线由(用于自动化车辆的)交通疏导系统在考虑到另外的(自动化的)车辆或者其他的对象的情况下借助于(数字的)地图确定,其中,在确定时以在自动化车辆和交通疏导系统之间的通信连接——例如以便使路线适应于改变的条件(行人、车辆移动等等)——为前提。
[0006]
紧急情况轨迹描绘这样的路线:所述路线例如使用于——从在紧急情况发生的时间点处的位置出发——尽可能快速地导致自动化车辆安全地停止(不与对象、另外的车辆等等碰撞)。优选地,紧急情况轨迹包括在安全的区域(交通路线的边缘区域、停车场等等)中的尽可能最快的路线。
[0007]
路线说明包括例如自动化车辆的正常轨迹和/或(当前的)位置,尤其是沿着正常轨迹的位置。
[0008]
紧急情况轨迹相对彼此的待遵守的在时间上和/或在位置上预给定的最小间距可理解为,这些紧急情况轨迹或者不相交或者——如果这些紧急情况轨迹至少部分地平行地延伸——具有相对彼此例如几米的安全间距和/或这样确定可能交叉或者不可能具有安全间距的紧急情况轨迹,使得相关的自动化车辆(所述自动化车辆接收这些紧急情况轨迹)在时间上错开地经过相应的危险区域。
[0009]
优选地,该方法的步骤这样长时间地周期性地重复,尤其是以预给定的周期持续时长重复,直到不再接收到路线数据值为止。
[0010]
这意味着例如,总是又从自动化车辆接收路线数据,以便因此——例如根据(沿着正常轨迹)分别当前的位置——确定(当前的)紧急情况轨迹并且传输给自动化车辆。
[0011]
优选地,该方法附加地设置周围环境数据值的接收,其中,周围环境数据值代表自动化车辆的周围环境。在此,对紧急情况轨迹的确定附加地根据自动化车辆的周围环境进行。
[0012]
例如,周围环境数据值的接收例如可理解为,自动化车辆本身(至少部分地)借助于环境传感装置感测这些周围环境并且将其传输以供接收。在另一实施方式中,周围环境数据值附加地或者替代地借助于包括环境传感装置的基础设施单元(照明装置、交通标志、桥墩、隧道墙等等)感测并且将其传输以供接收。
[0013]
环境传感装置可理解为至少一个视频传感器和/或至少一个雷达传感器和/或至少一个激光雷达传感器和/或至少一个超声传感器和/或至少一个另外的传感器——所述另外的传感器构造用于,以环境数据值的形式感测自动化车辆的周围环境。环境传感装置尤其构造为用于,感测在周围环境中的周围环境特征(道路走向、交通标志、车道标记、建筑物、车道边界等等)和/或交通对象(车辆、骑行者、步行者等等)。在一种实施方式中,环境传感装置包括例如具有合适的软件的计算单元(处理器、工作存储器、硬盘)和/或与这样一种计算单元连接,由此,可以感测这些周围环境特征和/或使它们分类或者对它们进行分配。
[0014]
紧急情况轨迹的确定例如可理解为,基于自动化车辆的地图数据和/或路线数据和/或周围环境数据值创建环境模型,并且接着借助于环境模型确定紧急情况轨迹。
[0015]
(用于确定紧急情况轨迹的)根据本发明的设备、尤其是服务器设置为用于,实施根据相应的方法权利要求中任一项所述的方法的所有步骤。
[0016]
在一种可能的实施方式中,(用于确定紧急情况轨迹的)设备包括计算单元(处理器、工作存储器、硬盘)以及一种合适的软件,以便实施根据方法权利要求中的一个所述的方法。为此,该设备包括例如发送单元和/或接收单元,所述发送单元和/或接收单元构造为用于,提供和/或传输和/或接收路线数据值和/或周围环境数据值和/或(呈数据值形式或者呈信号形式的)紧急情况轨迹。在一种替代的实施方式中,该设备借助于合适的接口与发送装置和/或接收装置连接。
[0017]
服务器例如可理解为单个的服务器或者服务器的复合结构(云)。
[0018]
此外,要求保护一种计算机程序,其包括指令,在由计算机实施该计算机程序时,所述指令安排该计算机实施根据方法权利要求中任一项所述的用于确定紧急情况轨迹的方法。在一种实施方式中,计算机程序相应于被(用于确定紧急情况轨迹的)设备包括的软件。
[0019]
此外,要求保护一种机器可读的存储介质,计算机程序存储在该存储介质上。
[0020]
用于运行自动化车辆的根据本发明的方法包括将路线数据值传输给外部服务器的步骤,其中,路线数据值代表与自动化车辆的正常轨迹有关的路线说明,和从外部服务器接收紧急情况轨迹的步骤,其中,借助于根据方法权利要求中任一项所述的用于确定紧急情况轨迹的方法来确定紧急情况轨迹。此外,该方法包括检验自动化车辆的通信连接的功能的步骤,其中,该通信连接至少构造用于接收紧急情况轨迹,并且,所述方法包括根据通信连接的功能借助于正常轨迹或者借助于紧急情况轨迹来运行自动化车辆的步骤。
[0021]
自动化车辆的通信连接的功能可理解为例如已有的或者非已有的、用于传输和/或接收数据值的功能能力。在此,功能例如以数据值形式代表通信连接的两种可能的反馈中的一种:(1)通信连接是有功能能力的;(2)通信连接不是有功能能力的。例如通过这样的
方式执行检验:实施内部的(基于软件的)分析和/或发射出测试信号并且将其与(可能的)响应信号进行比较。
[0022]
优选地,周期性地重复该方法的步骤。在此,借助于正常轨迹或者借助于最后所接收到的紧急情况轨迹来进行自动化车辆的运行。
[0023]
自动化车辆的借助于正常轨迹或者借助于最后所接收到的紧急情况轨迹的运行可理解为,借助于自动化的横向控制装置和/或纵向控制装置使自动化车辆沿着相应的轨迹运动。在另一实施方式中,运行可附加地理解为增强安全性的辅助功能(安全带的系紧、安全气囊的预调节、座椅位置是调整等等)的实施。运行尤其可理解为,车辆这样运行,使得避免或者尽可能地降低对于自动化车辆或者对于自动化车辆的乘客的——例如基于碰撞的——危险。
[0024]
(用于运行自动化车辆的)根据本发明的设备、尤其是控制器设置为用于,实施根据相应的方法权利要求中任一项所述的方法的所有的步骤。
[0025]
在一种可能的实施方式中,(用于运行自动化车辆的)设备包括计算单元(处理器、工作存储器、硬盘)以及合适的软件,以便实施根据方法权利要求中任一项所述的方法。为此,该设备包括例如发送单元和/或接收单元,所述发送单元和/或接收单元构造用于,提供和/或传输和/或接收路线数据值和/或周围环境数据值和/或紧急情况轨迹(呈数据值形式或者呈信号形式)。在一种替代的实施方式中,设备借助于合适的接口与发送装置和/或接收装置连接。根据该实施方式,发送装置和/或接收装置或者接口相应于这样的通信连接:所述通信连接至少构造用于接收紧急情况轨迹。此外,该设备具有用于运行自动化车辆的接口,借助于所述接口可以提供例如用于横向控制和/或纵向控制的相应的信号。
[0026]
此外,根据本发明的方法有利地解决这样的任务:这样实现自动化车辆的——例如从交通疏导中心(这里:服务器)出发——的运行,使得即使在自动化车辆和交通疏导中心之间的通信连接中断时实现自动化车辆的安全的运行(例如直到通信连接再次存在为止和/或直到所有参与的自动化车辆安全地(无碰撞地等等)停止为止)。该任务借助于根据本发明的系统(该系统包括一个用于确定紧急情况轨迹的设备和一个用于运行自动化车辆的设备)解决,其方式是,根据自动化车辆的路线说明为自动化车辆中的每个确定紧急情况轨迹。然后,根据负责相关的数据的交换的通信连接的功能借助于紧急情况轨迹运行自动化车辆。这允许,这些紧急情况轨迹这样相互协调,使得,在通信连接(尤其是自发地)中止的情况下,不发生相交或者碰撞。
[0027]
本发明的有利的拓展方案在从属权利要求中说明并且在说明书中举出。
附图说明
[0028]
在绘图中示出并且在随后的说明中更详尽地解释本发明的实施例。附图示出:
[0029]
图1以流程图形式示出用于确定紧急情况轨迹的根据本发明的方法的实施例;
[0030]
图2以流程图形式示出用于运行自动化车辆的根据本发明的方法的实施例;和
[0031]
图3以流程图形式示出两种方法的共同作用的实施例。
具体实施方式
[0032]
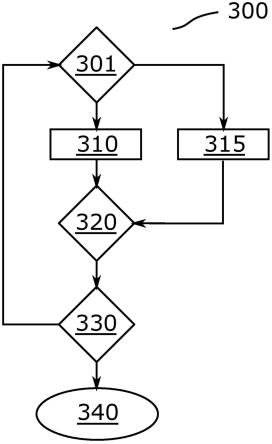
图1示出用于确定320紧急情况轨迹的方法300的实施例。
[0033]
在步骤301中,方法300开始。
[0034]
在步骤310中,接收代表自动化车辆的路线说明的路线数据值。
[0035]
在一种实施方式中,进行步骤320。在一种替代的实施方式中,进行步骤315。
[0036]
在步骤315中,接收周围环境数据值,其中,周围环境数据值代表自动化车辆的周围环境。
[0037]
在另一替代的实施方式中,首先进行步骤315,并且随后进行步骤310,或者,步骤310和315至少部分同时地实施。
[0038]
在步骤320中,根据自动化车辆的路线说明这样确定用于自动化车辆中的每个自动化车辆的紧急情况轨迹,使得紧急情况轨迹分别遵守在时间上和/或在地点上的预给定的相对彼此的最小间距。在另一实施方式中,附加地根据自动化车辆的周围环境确定紧急情况轨迹。
[0039]
在步骤330中,将紧急情况轨迹传输给自动化车辆—用以运行自动化车辆。在一种实施方式中,进行步骤340。在一种替代的实施方式中,方法300的步骤310,320,330这样长时间地周期性地重复,尤其是以预给定的周期持续时长重复,直到不再接收到路线数据值为止。
[0040]
在步骤340中,方法300结束。
[0041]
图2示出用于运行440自动化车辆的方法400的实施例。
[0042]
在步骤401中,方法400开始。
[0043]
在步骤410中,将路线数据值传输给外部服务器,其中,路线数据值代表与自动化车辆的正常轨迹有关的路线说明。
[0044]
在步骤420中,从外部服务器接收紧急情况轨迹,其中,借助于方法300的实施方式确定紧急情况轨迹。
[0045]
在步骤430中,检验自动化车辆的通信连接的功能,其中,该通信连接至少构造为用于接收紧急情况轨迹。
[0046]
在步骤440中,根据通信连接的功能借助于正常轨迹或者借助于紧急情况轨迹来运行自动化车辆。在一种替代的实施方式中,方法400的步骤410,420,430周期性地重复,其中,借助于正常轨迹或者借助于最后所接收的紧急情况轨迹来运行自动化车辆。
[0047]
在步骤450中,方法400结束。
[0048]
图3示出用于确定320紧急情况轨迹的方法300和用于运行440(所标出的)自动化车辆的方法400的交互作用的实施例。
[0049]
在步骤410中,将(所标出的)自动化车辆的路线数据值传输给外部服务器,其中,路线数据值代表与(所标出的)自动化车辆的正常轨迹的路线说明。
[0050]
在步骤310中,接收(所标出的)自动化车辆的路线数据值以及代表(另外的)自动化车辆的路线说明的另外的路线数据值。
[0051]
在步骤320中,根据自动化车辆的路线说明这样确定用于自动化车辆中的每个自动化车辆的紧急情况轨迹(即,还有用于所标出的自动化车辆的所标出的紧急情况轨迹,所述所标出的自动化车辆在步骤410中传输了其路线数据值),使得紧急情况轨迹分别遵守在时间上和/或在地点上预给定的相对彼此的最小间距。
[0052]
在步骤330中,将紧急情况轨迹传输给自动化车辆(即,也将所标出的紧急情况轨
迹传输给所标出的自动化车辆,所述所标出的自动化车辆在步骤410中传输其路线数据值)——以便运行自动化车辆。
[0053]
在步骤420中,从外部服务器接收紧急情况轨迹。
[0054]
在步骤430中,检验(所标出的)自动化车辆的通信连接的功能,其中,通信连接至少构造为用于接收紧急情况轨迹。
[0055]
在步骤440中,根据通信连接的功能借助于紧急情况轨迹或者借助于(所标出的)紧急情况轨迹来运行(所标出的)自动化车辆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1