雷达装置和位置检测系统的制作方法
本发明涉及一种雷达装置和位置检测系统。
背景技术:
1、雷达装置利用发射天线发送电波,经由接收天线接收由对象物反射后的电波,并根据其接收信号的频率、相位检测对象物的距离、速度。另外,通过使用多个接收天线,不仅能够检测与对象物之间的距离,还能够检测对象物的方向,因此通过对天线进行二维布置,就能够检测三维坐标。
2、例如,在非专利文献1中,公开了一种包括四通道接收器和双通道发射器的、识别对象物的三维坐标的装置。另外,在专利文献1中,公开了以下技术:在四个接收天线的后级设置天线切换开关和一个接收器,利用天线切换开关依次将接收天线的信号分时切换,并输入到一个接收器。
3、非专利文献1:ismail nasr,et al.,“a highly integrated 60ghz 6-channeltransceiver with antenna in package for smart sensing and short-rangecommunications”,ieee journal of solid-state circuits,vol.51,no.9,september2016.
4、专利文献1:美国专利第8390507号说明书
技术实现思路
1、-发明要解决的技术问题-
2、但是,在非专利文献1的技术中,由于与各接收天线相对应地设置有和天线相同数量的接收器,因此存在电路规模变大而导致雷达装置难以小型化、且功耗变大的问题。
3、另外,在如专利文献1的技术那样进行分时工作的情况下,由于接收器从各接收天线接收的信号会产生时间偏差,因此在对象物移动的情况下,到达角的检测可能会产生误差。具体而言,例如,假设从发射天线发送频率为60[ghz]的电波,从以2.5[mm]的间隔布置的两个接收天线以每1[ms]的分时向一个接收器输入接收信号。在该情况下,假定对象物正在以2.5[m/s]的速度朝着接收天线的方向移动。这样一来,由第一个接收天线接收到的信号比由第二个接收天线接收到的信号晚1[ms],因此从第二个接收天线接收到的是目标移动了2.5[mm]后的信号。此处,由于60[ghz]的信号的波长λ为5[mm],因此接收信号的相位会偏移180[deg.]。这样一来,在计算到达角时,在对象物存在于接收天线的正面的情况下,虽然两个天线间的相位差为0[deg.]、到达角为0[deg.],但到达角的计算结果则为90[deg.],该值大幅偏离。
4、为了减少到达角的偏差,可以考虑提高接收天线的切换速度,以减小接收信号的时间差。但是,如果提高接收天线的切换速度,则需要进行高速的切换处理和高速的数据处理,存在电路规模增大、功耗变大的问题。另外,即使在以高速地进行了切换处理的情况下,也无法使时间偏差为零,因此,仍存在因非同时性而导致角度检测误差的问题。
5、本公开正是为了解决上述技术问题而完成的,其目的在于:实现雷达装置的小型化和低成本化,并且在兼顾信号处理的简化和角度检测(二维检测或三维检测)的高精度化的同时实现低功耗化。
6、-用于解决技术问题的技术方案-
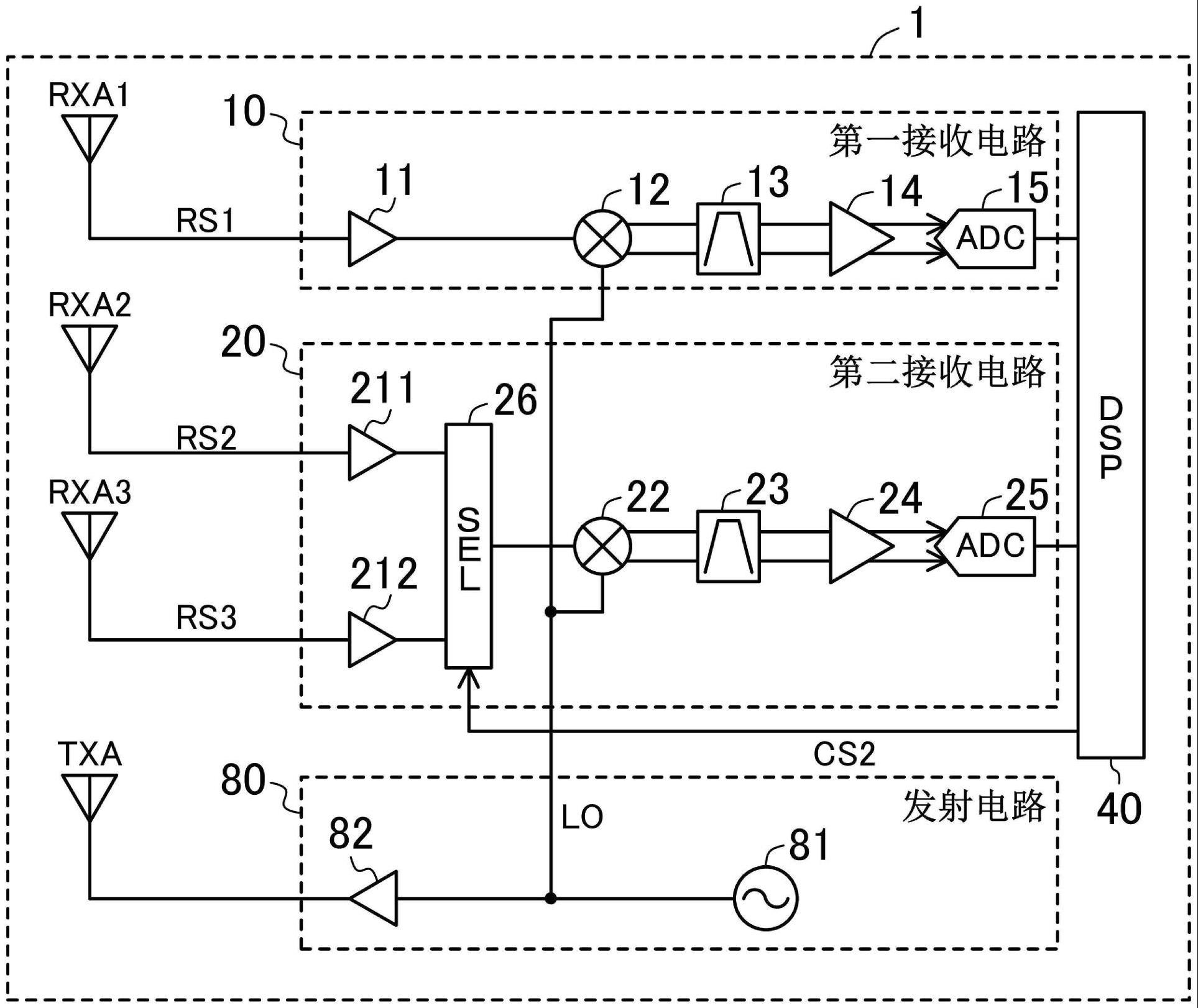
7、本公开的一个方面的雷达装置包括第一接收天线、第二接收天线、第三接收天线、第一接收电路以及第二接收电路,所述第一接收天线输出第一接收信号,所述第二接收天线在第一方向上与所述第一接收天线相隔开第一距离而布置,并输出第二接收信号,所述第三接收天线在与所述第一方向相交的第二方向上与所述第一接收天线相隔开第二距离而布置,并输出第三接收信号,所述第一接收电路处理所述第一接收信号,所述第二接收电路选择所述第二接收信号和所述第三接收信号中的一者并进行处理。
8、根据所述方面,对于第二接收天线和第三接收天线没有设置单独的接收电路,因此与上述非专利文献1相比,电路规模变小,能够实现小型化并且能够实现低功耗化。
9、本公开的一个方面的雷达装置包括第一接收天线、第二接收天线、第三接收天线、第四接收天线、第一切换电路、第二切换电路以及信号处理部,所述第一接收天线输出第一接收信号,所述第二接收天线在第一方向上与所述第一接收天线相隔开第一距离而布置,并输出第二接收信号,所述第三接收天线在与所述第一方向正交的第二方向上与所述第一接收天线相隔开第二距离而布置,并输出第三接收信号,所述第四接收天线在所述第二方向上与所述第二接收天线相隔开所述第二距离而布置,且在所述第一方向上与所述第三接收天线相隔开所述第一距离而布置,所述第四接收天线输出第四接收信号,所述第一切换电路选择所述第一接收信号、所述第二接收信号和所述第三接收信号中的一者并输出,所述第二切换电路选择所述第二接收信号、所述第三接收信号和所述第四接收信号中的一者并输出,所述信号处理部处理所述第一切换电路的输出信号和所述第二切换电路的输出信号。
10、根据所述方面,对于四个接收天线没有设置单独的接收电路,而是对由第一切换电路和第二切换电路选择出的信号进行处理,因此与上述非专利文献1相比,电路规模变小,能够实现小型化并且能够实现低功耗化。
11、另外,来自第一切换电路的输出和来自第二切换电路的输出是从两个接收天线同时接收到的接收信号,因此能够做到不会产生:因切换接收天线而造成反射波的接收时刻存在偏差所引起的角度的检测误差。
12、本公开的一个方面的位置检测系统包括第一接收天线、第二接收天线、第三接收天线、第四接收天线以及信号处理部,所述第一接收天线输出第一接收信号,所述第二接收天线在第一方向上与所述第一接收天线相隔开第一距离而布置,并输出第二接收信号,所述第三接收天线在与所述第一方向正交的第二方向上与所述第一接收天线相隔开第二距离而布置,并输出第三接收信号,所述第四接收天线在所述第二方向上与所述第二接收天线相隔开所述第二距离而布置,且在所述第一方向上与所述第三接收天线相隔开所述第一距离而布置,所述第四接收天线输出第四接收信号,所述信号处理部包括第一工作模式、第二工作模式、第三工作模式以及第四工作模式,在所述第一工作模式下,所述信号处理部接收所述第一接收信号和所述第二接收信号并进行处理,在所述第二工作模式下,所述信号处理部接收所述第一接收信号和所述第三接收信号并进行处理,在所述第三工作模式下,所述信号处理部接收所述第一接收信号和所述第四接收信号并进行处理,在所述第四工作模式下,所述信号处理部接收所述第二接收信号和所述第三接收信号并进行处理,所述信号处理部根据所述第一工作模式和所述第二工作模式的处理结果计算目标的三维坐标,所述信号处理部根据所述第三工作模式和所述第四工作模式的处理结果计算所述目标的三维坐标。
13、根据所述方面,与所述雷达装置的情况同样,对于四个接收天线没有设置单独的接收电路,因此与上述非专利文献1相比,电路规模变小,能够实现小型化并且能够实现低功耗化。
14、另外,在第一工作模式~第四工作模式下,分别对从两个接收天线同时接收到的接收信号进行处理,因此能够做到不会产生:因切换接收天线而造成反射波的接收时刻存在偏差所引起的角度的检测误差。
15、此外,在本方面中,根据第一工作模式和第二工作模式的处理结果计算目标的三维坐标,根据第三工作模式和第四工作模式的处理结果计算目标的三维坐标。由此,在上述专利文献1中,由于对三个接收天线进行分时处理,所以需要进行三次传感检测处理,而在本方面中,对于各三维坐标的计算只要进行两次传感检测处理即可,能够缩短处理时间。
16、-发明的效果-
17、根据本公开,能够实现雷达装置的小型化和低成本化,并且能够在兼顾信号处理的简化和角度检测(二维检测或三维检测)的高精度化的同时实现低功耗化。
- 还没有人留言评论。精彩留言会获得点赞!