基于调频模糊函数的复合微动目标参数估计方法
1.本发明属于雷达信号处理领域,涉及雷达目标参数估计方法中的一种基于调频模糊函数的复合微动目标参数估计方法。
背景技术:
2.雷达目标探测与识别是目前传感器信息处理领域中的一个重要研究方向,通过对雷达回波信号的处理可获得目标的运动轨迹、速度、形状、尺寸、电磁参数等信息。雷达观测目标通常为非合作目标,且随着隐身、伪装等目标特征控制技术和虚假目标成像等目标干扰技术的发展,使基于目标形状、尺寸等传统雷达特征的识别受到挑战,对目标特有运动信息的进一步挖掘,是应对该挑战的一个可行途径。
3.微动(micro
‑
motion)是指目标或目标的组成部分除了主体平动之外的振动、转动等小幅往复性运动。目标微动来源于特定的受力作用下的目标特殊结构,微动状态具有独特性,反映了目标的几何结构信息与运动特性等精细特征,可作为目标识别的重要依据。目前,微动特征在雷达目标探测与识别的作用愈加凸显,被广泛用于空间、空中、地面、海面目标探测中。对于地/海面目标,微动特征可用于辨别人的行进状态(徒手行进、跑步等)、从防空阵地中检测带转动天线的雷达、分辨海上颠簸舰船等;对于空中目标,微动特征可用于旋翼飞机低空悬停检测、固定翼飞机和直升机的鉴别;对于空间目标,由于弹道导弹弹头和轻、重诱饵的质量分布具有明显差异,因此微动特征明显不同,可用作从诱饵群中选择弹头目标的重要依据。
4.目标运动产生雷达信号多普勒调制。对于复合微动目标,即同时包含平动和微动两种运动的目标,目标多普勒调制特性表现更加复杂,信号的微多普勒周期性遭到破坏,基于信号微多普勒周期性的估计方法失效。针对复合微动目标参数估计,对比文件“wenpeng zhang,yaowen fu,jiapeng yin,micro
‑
doppler period estimation based on concentration statistics of ambiguity function[j],ieee transactions on aerospace and electronic systems vol.56,no.3 june 2020”提出基于模糊函数聚集度的微动周期估计方法。该方法具有无需进行平动补偿,能够在较低信噪比条件下准确估计微动周期等优势。然而,该方法仅能够处理包含二阶多项式平动的复合微动目标,且无法实现其他目标运动参数的估计。
技术实现要素:
[0005]
本发明的目的是,针对同时包含微动和机动的复合微动目标参数估计问题,提出一种基于调频模糊函数的复合微动目标参数估计方法,首先对雷达信号处理中广泛使用的模糊函数进行改进,提出了调频模糊函数,相比模糊函数,调频模糊函数增加了调频率相乘项,能够处理更复杂的运动,同时,通过计算复合微动目标回波的调频模糊函数统计量,进一步估计微动周期,并实现目标平动参数的估计。
[0006]
为达到上述目的,本发明是通过以下技术方案实现的:
[0007]
一种基于调频模糊函数的复合微动目标参数估计方法,包括下列步骤:
[0008]
s1计算复合微动目标雷达信号的调频模糊函数:
[0009]
记复合微动目标的雷达信号为s(n),信号的采样时间间隔为δt,其中0≤n<n表示信号的离散时间,n为信号的长度,nδt即为信号的持续时间。复合微动目标的雷达信号s(n)可建模为:
[0010][0011]
其中s
m
(n)为雷达信号的微动分量,为雷达信号的平动分量,λ为雷达信号的波长,r
t
(n)为目标平动,使用三阶多项式建模目标平动,可得:
[0012]
r
t
(n)=r0+a1(nδt)+a2(nδt)2+a3(nδt)3[0013]
r0为目标到雷达的起始距离,a1、a2、a3分别为平动的一阶参数、二阶参数、三阶参数。通常将三阶多项式平动称为机动。该信号的调频模糊函数计算具体步骤如下:
[0014]
s1.1计算该信号的调频瞬时自相关函数
[0015][0016]
其中,*为共轭运算符,m为调频瞬时自相关函数的延时,m,n满足条件:0≤m≤n
‑
n+1,β为调频率,β的取值为其中δβ为调频率采样间隔,::表示从第一个数开始以间隔δβ进行采样直到最后一个数形成的数组。为了平衡精度和计算量,此处设置对于较大的延时m,满足条件0≤m≤n
‑
n+1的n较少,将影响调频瞬时自相关函数的可靠性,因此一般设置0≤m<[r
m
×
n],r
m
可设置为0.8,其中[]为取整运算。
[0017]
s1.2通过对进行离散傅里叶变换得到该信号的调频模糊函数
[0018][0019]
其中n
f
为离散傅里叶变换的点数,k=0,1,
…
,n
f
‑
1表示离散频率;
[0020]
s2计算调频模糊函数的l
p
‑
l2范数,记为
[0021][0022]
其中为l
p
范数,为l2范数,l2范数起到归一化的作
用。此处设置p=4。注意,上式的求和运算消除了离散频率k,故调频模糊函数的l4‑
l2范数仅为延时m和调频率β的函数。
[0023]
s3估计调频率并生成调频模糊函数统计量,具体步骤如下:
[0024]
s3.1定义为延时m调频率β的估计值,对每一个延时m,通过最大化获得调频率估计值
[0025][0026]
s3.2对每一个延时m,将代入s2中的得到调频模糊函数统计量
[0027]
s4基于t
s
(m)的峰值位置估计目标的微动周期具体步骤如下:
[0028]
s4.1计算调频模糊函数统计量t
s
(m)的截尾平均值η:
[0029]
首先,对t
s
(m)按照从大到小的顺序排列,记重新排列后的统计量为然后,从中选取倒数的20%值计算平均值:其中为下取整运算,为上取整运算。
[0030]
s4.2寻找调频模糊函数统计量t
s
(m)的峰值位置,即满足下述条件的延时m:
[0031][0032]
其中l表示延时偏移量,l为延时偏移量的范围,可取为5。用集合θ
m
={m
i
|1≤i≤p}记录所有的峰值位置,其中i为峰值位置的索引,p为峰值位置的数量;
[0033]
s4.3计算加权平均峰值距离m
i
表示除第一个峰值外其他峰值的位置,2≤i≤p;
[0034]
s4.4获得微动周期估计值
[0035]
s5估计多普勒中心具体步骤如下:
[0036]
s5.1将m=[d
p
]代入s3.1中的得到其中[d
p
]为最接近d
p
的整数;
[0037]
s5.2将m=[d
p
],代入s1.2中的调频模糊函数得到
[0038]
s5.3根据的峰值位置估计多普勒中心
[0039][0040]
s6估计目标的高阶平动参数:
[0041][0042]
与现有技术相比,本发明的有益效果如下:
[0043]
第一,本发明提供的复合微动目标参数估计方法能够实现机动和微动复合运动条件下的微动周期估计,并且不需要进行平动补偿;
[0044]
第二,本发明提供的复合微动目标参数估计方法能够在估计微动周期的同时获得平动参数的估计。
附图说明
[0045]
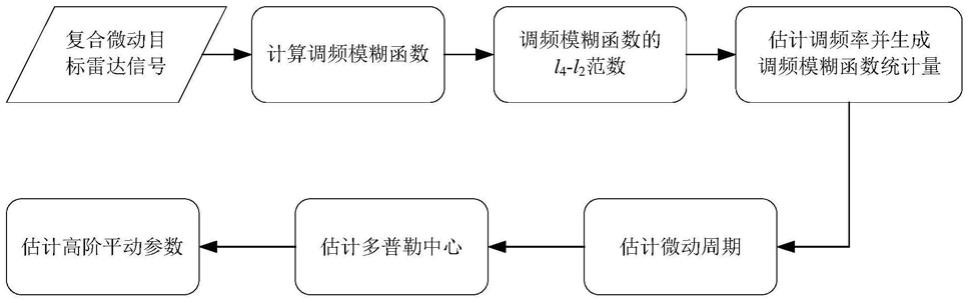
图1复合微动目标参数估计流程图;
[0046]
图2复合微动目标雷达信号的处理结果:(a)复合微动目标雷达信号时频图,(b)调频模糊函数切片,(c)模糊函数统计量,(d)调频模糊函数统计量。
具体实施方式
[0047]
下面结合附图对本发明做进一步说明:
[0048]
图1为本发明提出的复合微动目标参数估计流程图。首先,计算复合微动目标雷达信号的调频模糊函数;之后计算调频模糊函数的l4‑
l2范数;在获得调频模糊函数的l4‑
l2范数的基础上,估计调频率并生成调频模糊函数统计量;进一步估计目标的微动周期;在获得微动周期的基础上,估计多普勒中心;最后,估计目标的高阶平动参数。
[0049]
图2为复合微动目标雷达信号的处理结果。在该实验中,目标的微动周期为2s,目标的平动为r
t
(t)=
‑
t+0.4t2+0.02t3,通常也将三阶多项式的平动称为目标机动。图2(a)为复合微动目标雷达信号时频图,坐标横轴为时间,坐标纵轴为多普勒频率,从图中可看出,目标的频率包括两部分,一部分为正弦形式的微动引起的多普勒频率变化,另外一部分则为目标机动引起的趋势项。图2(b)为调频模糊函数的切片,即的幅度图像。图2(c)为根据对比文件“wenpeng zhang,yaowen fu,jiapeng yin,micro
‑
doppler period estimation based on concentration statistics of ambiguity function[j],ieee transactions on aerospace and electronic systems vol.56,no.3 june 2020”计算得到的模糊函数统计量,在τ=2s附近,该统计量未出现明显的峰值,表明其无法估计微动周期。作为对比,图2(d)中的调频模糊函数统计量在在τ=2s处出现较为明显的峰值,据此能够估计得到微动周期为与真实的微动周期一致,表明本发明提出的方法能够处理
机动条件下的微动目标信号,获取其周期估计。进一步,使用本发明能够得到高阶平动参数的估计,分别为和这两个参数和真实值0.4m/s2、0.02m/s3接近,表明本发明提出的方法能够同时获得复合微动目标的高阶平动参数估计。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1