地壳断层三维形变自动监测系统和监测方法与流程
1.本发明属大地形变测量技术领域,具体涉及地壳断层三维形变测量。
背景技术:
2.地震的孕育和发生与地壳形变密切相关,在整个地壳形变体系中,断层形变与强震孕育发生过程最为密切,是了解地震过程和建立有效物理预报机制的关键。因此,需要强化断层近场密集观测,探寻地震过程的物理本质,推进地震预测产生实质性进展。
3.上世纪60年代初,根据地震研究的需要,我国开始了跨断层形变观测工作。初期阶段采用大地测量仪器在露天人工施测,用基线尺观测水平分量,用水准仪观测垂直分量,通称短基线、短水准测量。该方案一直沿用下来,数字水准仪取代了光学水准仪,全站仪取代了基线尺,实现了数字化监测。尽管该方案的自动化程度较低,数据连续性和实时性较差,人力成本较高,但是场地建设投入相对较少,仍然是跨断层形变测量的主要手段。
4.为了提高观测精度缩短观测周期,以期捕获较短周期前兆信息,建设了一些固定观测台站。上世纪60年代末70年代初,地震研究所成功研制ssy
‑
1型目视伸缩仪和msq型目视水管倾斜仪,用来测定断层两侧的水平和垂直位移。70年代中期,地壳应力研究所研制出第一代连续观测仪器——dy
‑
1型断层蠕变仪,用于观测断层的微量水平形变,唐山地震期间在北京大灰厂观测站和八宝山观测站、唐山赵各庄煤矿投入观测。1983年,地震研究所成功研制fsq型浮子水管倾斜仪,用于断层垂直位移的连续观测。1986年至2000年期间,地壳应力研究所先后研制了第二代断层形变监测系统dsj型水平形变测量仪和dfj垂直型变测量仪,第三代断层形变监测系统dsf型和dfd型,以及可同时测量断层水平法向、水平切向和垂向相变的第四代断层形变测量系统——md系列。但是,上述各类连续测量系统采用不同原理的技术手段测量不同的形变分量,测量系统结构复杂;上述各类连续测量系统都需要建在山洞内或3m以下的观测室内,基础设施建设和设备购置成本都较高。
技术实现要素:
5.本发明的目的是克服现有技术存在的缺陷,提供一种实现跨断层三维形变的自动监测系统。
6.本发明提供了一种地壳断层三维形变自动监测系统,包括机器视觉测量装置、激光发射装置、标定台、屏蔽筒和主机;所述机器视觉测量装置包括两路机器视觉测量单元,分别记为a路机器视觉测量单元和b路机器视觉测量单元;两路机器视觉测量单元的结构相同,均分别包括测量单元外壳、相机和屏幕,所述相机通过相机支架安装在所述测量单元外壳内,所述屏幕安装在相机外壳上、并位于所述相机镜头的正前方;所述两路机器视觉测量单元的测量单元外壳安装在标定台上;所述相机的数据线连接至所述主机;所述激光发射装置包括两路激光发射单元,分别记为a路激光发射单元和b路激光发射单元;两路激光发射单元均分别包括基座、激光反射单元外壳和准直激光器,所述激光反射单元外壳安装在所述基座上;所述的准直激光器的数据线连接至所述主机;所述a路机器视觉测量单元和b
路机器视觉测量单元架设在所述标定台的工作平台上,所述标定台的工作平台可以实现x
‑
y
‑
z三维移动;所述屏蔽筒包括两个屏蔽筒,其中一个屏蔽筒连接在a路机器视觉测量单元的测量单元外壳与a路激光发射单元的激光反射单元外壳之间,另一个屏蔽筒连接在b路机器视觉测量单元的测量单元外壳与b路激光发射单元的激光反射单元外壳之间;所述屏蔽筒用于屏蔽风霜雨雪天气环境干扰。
7.进一步讲,本发明所述的地壳断层三维形变自动监测系统,其中:
8.所述标定台包括由x方向运动精密位移台、y方向运动精密位移台和z方向运动精密位移台构成的位置调整装置,所述工作平台与该位置调整装置固连。
9.所述的x方向运动精密位移台、y方向运动精密位移台和z方向运动精密位移台的位移精度为优于0.01mm以上。
10.所述准直激光器发射稳定形态的圆柱形光束。
11.所述相机为cmos或ccd工业相机,所述相机的视场范围不小于50mm
×
50mm,所述相机分辨率优于0.05mm/pixel。
12.所述主机内安装有用于断层形变解算软件,用于提取标记点、标定测量系统和解算测量数据。
13.本发明中还提出了利用上述地壳断层三维形变自动监测系统进行监测的方法,包括以下步骤:
14.步骤一、埋设观测墩:在大地断层的一盘布设观测墩一,在另一盘布设观测墩二和观测墩三,三个观测墩的空间分布呈三角形;
15.步骤二、架设监测系统:在观测墩一上安置标定台,标定台上架设a路机器视觉测量单元和b路机器视觉测量单元;在观测墩二上架设a路激光发射单元,在观测墩三上架设b路激光发射单元;调整两路激光发射单元中的准直激光器发射的激光能够分别照射在各自所属机器视觉测量单元的屏幕上,a路机器视觉测量单元的屏幕记为屏幕a,b路机器视觉测量单元的屏幕记为屏幕b;安装两个屏蔽筒;接好相机和准直激光器的数据线和电源线;
16.步骤三、标定监测系统,得到三维形变测量参数,包括:
[0017]3‑
1)获取光斑图像:所述主机控制a路激光发射单元向a路机器视觉测量单元发射激光束,在屏幕a上形成光斑;控制b路激光发射单元向b路机器视觉测量单元发射激光束,在屏幕b上形成光斑;所述主机控制两个相机启动,拍摄后分别获取屏幕a上的光斑图像和屏幕b上的光斑图像;
[0018]3‑
2)提取标记点:使用断层形变解算软件从步骤三获取的光斑图像中提取出光斑中心,并分别作为标记点;
[0019]3‑
3)确定监测系统的前后形变测量参数:
[0020]
x方向形变分量标定前:按照步骤3
‑
1)先获取屏幕a上的光斑图像i
l1
和屏幕b上的光斑图像i
r1
;调整标定台的x方向运动精密位移台产生一个已知的前后运动量x,按照步骤3
‑
1)再次获取获取屏幕a上的光斑图像i
l1
'和屏幕b上的光斑图像i
r1
';
[0021]
按照步骤3
‑
2)分别提取上述光斑图像i
l1
、光斑图像i
r1
、光斑图像i
l1
'和光斑图像i
r1
'中的标记点坐标c
l1
(x
l1
,y
l1
)、c
r1
(x
r1
,y
r1
)、c
l1
'(x
l1
',y
l1
')和c
r1
'(x
r1
',y
r1
');
[0022]
得到a路机器视觉测量单元中标记点横坐标位移量为δx
l1=
x
l1
'
‑
x
l1
,纵坐标位移量为δy
l1=
y
l1
'
‑
y
l1
;b路机器视觉测量单元中标记点横坐标位移量为δx
r1=
x
r1
'
‑
x
r1
,纵坐标
位移量为δy
r1=
y
r1
'
‑
y
r1
;
[0023]
监测系统的前后形变测量参数为
[0024]3‑
4)确定监测系统的左右形变测量参数:
[0025]
y方向形变分量标定前,按照步骤3
‑
1)先获取屏幕a上的光斑图像i
l2
和屏幕b上的光斑图像i
r2
;调整标定台的y方向运动精密位移台产生一个已知的左右运动量y,按照步骤3
‑
1)再次获取屏幕a上的光斑图像i
l2
'和屏幕b上的光斑图像i
r2
';
[0026]
按照步骤3
‑
2)分别提取上述光斑图像i
l2
、光斑图像i
r2
、光斑图像i
l2
'和光斑图像i
r2
'中的标记点坐标c
l2
(x
l2
,y
l2
)、c
r2
(x
r2
,y
r2
)、c
l2
'(x
l2
',y
l2
')和c
r2
'(x
r2
',y
r2
');
[0027]
得到a路机器视觉测量单元中标记点横坐标位移量为δx
l2=
x
l2
'
‑
x
l2
,纵坐标位移量为δy
l2=
y
l2
'
‑
y
l2
;b路机器视觉测量单元中标记点横坐标位移量为δx
r2=
x
r2
'
‑
x
r2
,纵坐标位移量为δy
r2=
y
r2
'
‑
y
r2
;
[0028]
监测系统的左右形变测量参数为
[0029]3‑
5)确定监测系统的上下形变测量参数:
[0030]
z方向形变分量标定前,按照步骤3
‑
1)获取屏幕a上的光斑图像i
l3
和屏幕b上的光斑图像i
r3
;调整标定台的上下运动精密位移台产生一个已知的上下运动量z,按照步骤3
‑
1)再次获取屏幕a上的光斑图像i
l3
'和屏幕b上的光斑图像i
r3
';
[0031]
按照步骤3
‑
2)分别提取光斑图像i
l3
、光斑图像i
r3
、光斑图像i
l3
'和光斑图像i
r3
'中的标记点坐标c
l3
(x
l3
,y
l3
)、c
r3
(x
r3
,y
r3
)、c
l3
'(x
l3
',y
l3
')和c
r3
'(x
r3
',y
r3
');
[0032]
得到a路机器视觉测量单元中标记点横坐标位移量为δx
l3=
x
l3
'
‑
x
l3
,纵坐标位移量为δy
l3=
y
l3
'
‑
y
l3
;b路机器视觉测量单元中标记点横坐标位移量为δx
r3=
x
r3
'
‑
x
r3
,纵坐标位移量为δy
r3=
y
r3
'
‑
y
r3
;
[0033]
监测系统的上下形变测量参数为
[0034]
步骤四、解算测量数据,最终获得实际测量工况下断层三维形变量,包括:
[0035]
测量时,a路机器视觉测量单元观测到标记点坐标位移量为(δx
l
,δy
l
),b路机器视觉测量单元观测到标记点坐标位移量为(δx
r
,δy
r
);
[0036]
设理想情形是:a路激光发射单元的激光垂直于a路屏幕,b路激光发射单元的激光垂直于b路屏幕,则:
[0037]
理想情形下断层前后形变量为:
[0038][0039]
理想情形下断层左右形变量为
[0040]
[0041]
理想情形下断层上下形变量为
[0042][0043]
使用步骤三得到的监测系统的前后形变测量参数、左右形变测量参数和上下形变测量参数对理想情形下的断层形变量进行补偿,则最终得到:
[0044]
实际测量工况下断层上下形变量为:
[0045][0046]
实际测量工况下断层前后形变量为:
[0047][0048]
实际测量工况下断层左右形变量为
[0049][0050]
现有技术中实现地壳断层形变的测量大多是结合多种类型的连续测量系统,即采用不同原理的技术手段测量不同的形变分量,从而使得测量系统结构复杂;而且各类连续测量系统都需要建在山洞内或3m以下的观测室内,其基础设施建设和设备购置成本都较高。本发明提供的地壳断层三维形变自动监测方法,仅使用一种技术手段即可实现地壳断层三维形变的自动监测,结构简单、成本低,而且可以屏蔽恶劣天气等环境干扰,具有较强的环境适应性。
附图说明
[0051]
图1是本发明所述的监测系统的结构示意图;
[0052]
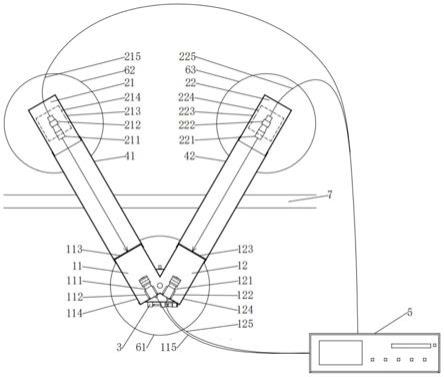
图2是图1所示监测系统安装架设后的主视图;
[0053]
图3是图2所示监测系统安装架设后的俯视图;
[0054]
图4是本发明监测系统,x轴方向形变分量标定简图;
[0055]
图5是本发明监测系统,y轴方向形变分量标定简图;
[0056]
图6是本发明监测系统,z轴方向形变分量标定简图。
[0057]
图中:
[0058]1‑
机器视觉测量装置
ꢀꢀꢀꢀꢀꢀ
11
‑
左路机器视觉测量单元
ꢀꢀ
111
‑
左路相机
[0059]
112
‑
左路相机支架
ꢀꢀꢀꢀꢀꢀꢀꢀ
113
‑
左路屏幕
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
114
‑
左路测量单元外壳
[0060]
115
‑
左路相机数据线
ꢀꢀꢀꢀꢀꢀ
12
‑
右路机器视觉测量单元
ꢀꢀ
121
‑
右路相机
[0061]
122
‑
右路相机支架
ꢀꢀꢀꢀꢀꢀꢀꢀ
123
‑
右路屏幕
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
124
‑
右路测量单元外壳
[0062]
125
‑
右路相机数据线
ꢀꢀꢀꢀꢀꢀ2‑
激光发射装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
‑
左路激光发射单元
[0063]
211
‑
左路准直激光器
ꢀꢀꢀꢀꢀꢀ
212
‑
左路激光器支架
ꢀꢀꢀꢀꢀꢀꢀ
213
‑
左路发射单元外壳
[0064]
214
‑
左路发射单元基座
ꢀꢀꢀꢀ
215
‑
左路激光器数据线
ꢀꢀꢀꢀꢀ
22
‑
右路激光发射单元
[0065]
221
‑
右路准直激光器
ꢀꢀꢀꢀꢀꢀ
222
‑
右路激光器支架
ꢀꢀꢀꢀꢀꢀꢀ
223
‑
右路发射单元外壳
[0066]
224
‑
右路发射单元基座
ꢀꢀꢀꢀ
225
‑
右路激光器电源线
ꢀꢀꢀꢀꢀ3‑
标定台
[0067]
31
‑
前后运动精密位移台
ꢀꢀꢀ
32
‑
左右运动精密位移台
ꢀꢀꢀ
33
‑
上下运动精密位移台
[0068]4‑
屏蔽筒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41
‑
左路屏蔽筒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42
‑
右路屏蔽筒
[0069]5‑
主机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
61
‑
观测墩一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62
‑
观测墩二
[0070]
63
‑
观测墩三
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ7‑
地壳断层。
具体实施方式
[0071]
在本发明的描述中,需要说明的是,术语、“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“a”、“b”、“一”、“二”、“三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0072]
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,对于机械连接可以是固定连接,也可以是可拆卸连接,或一体地连接;对于电连接可以是直接相连,也可以通过中间媒介间接相连,也可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0073]
本发明提供的地壳断层三维形变自动监测方法的设计思路是:在地壳断层的一盘布设观测墩一,在地壳断层的另一盘布设观测墩二和观测墩,三个观测墩空间分布呈三角形;由a、b两路机器视觉测量单元组合成一体,通过同一个标定台安装在观测墩一上;将a、b两路激光发射单元分别安装在观测墩二和观测墩三上;左路激光发射单元发射激光,在左路机器视觉测量单元的屏幕上形成光斑,由左路机器视觉测量单元采集光斑图像;同理,右路激光发射单元发射激光,在右路机器视觉测量单元的屏幕上形成光斑,由右路机器视觉测量单元采集光斑图像;使用标定台对监测系统x方向、y方向、z方向形变分量分别进行标定,通过建立三维形变量和图像像素的数学关系,形成断层形变解算软件;测量时,监测系统通过测量光斑图像中光斑标记点的像素值变化,反算断层的三维形变。
[0074]
下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
[0075]
实施例:
[0076]
如图1所示,一种地壳断层三维形变自动监测系统,包括机器视觉测量装置1、激光发射装置2、标定台3、屏蔽筒4和主机5。
[0077]
如图2和图3所示,所述机器视觉测量装置1包括两路机器视觉测量单元,分别记为左路机器视觉测量单元11和右路机器视觉测量单元12;左路机器视觉测量单元11分别包括左路测量单元外壳114、左路相机111和左路屏幕113,所述左路相机111通过左路相机支架112安装在所述左路测量单元外壳114内,所述左路屏幕113安装在左路相机111的外壳上、
并位于所述左路相机111镜头的正前方,如图4所示;右路机器视觉测量单元12的结构与所述左路机器视觉测量单元11的结构相同,即右路测量单元外壳124、右路相机121和右路屏幕123,所述右路相机121通过右路相机支架122安装在所述右路测量单元外壳124内,所述右路屏幕123安装在右路相机121的外壳上、并位于所述右路相机121镜头的正前方,如图4所示;所述的左路相机111和右路相机121均为cmos或ccd工业相机,其视场范围不小于50mm
×
50mm,分辨率优于0.05mm/pixel。所述两路机器视觉测量单元的测量单元外壳安装在标定台3上;所述左路相机数据线115和所述左路相机数据线125均连接至所述主机5。
[0078]
如图2和图3所示,所述激光发射装置2包括两路激光发射单元,分别记为左路激光发射单元21和右路激光发射单元22;左路激光发射单元21包括左路发射单元基座214、左路激光反射单元外壳213和左路准直激光器211,所述左路激光反射单元外壳213安装在所述左路发射单元基座214上;所述右路激光发射单元22的结构与左路激光发射单元21的结构相同,即所述右路激光反射单元外壳223安装在所述右路发射单元基座224上;所述左路准直激光器211和右路准直激光器211均可以发射稳定形态的圆柱形光束,所述的左路准直激光器211和所述的左路准直激光器221的数据线均连接至所述主机5。
[0079]
如图2所示,所述标定台3包括由前后(x方向)运动精密位移台31、左右(y方向)运动精密位移台32和上下(z方向)运动精密位移台33构成的位置调整装置,所述工作平台与该位置调整装置固连。所述左路机器视觉测量单元11和右路机器视觉测量单元12架设在所述标定台3的工作平台上,所述标定台3的工作平台可以实现x
‑
y
‑
z三维移动;本发明中,所述的前后运动精密位移台31、左右运动精密位移台32和上下运动精密位移台33的位移精度为优于0.01mm以上。
[0080]
本发明中包括两个屏蔽筒,如图3所示,其中的左路屏蔽筒41连接在左路机器视觉测量单元11的测量单元外壳与左路激光发射单元21的激光反射单元外壳之间,右路屏蔽筒42连接在右路机器视觉测量单元12的测量单元外壳与右路激光发射单元22的激光反射单元外壳之间;所述屏蔽筒用于屏蔽风霜雨雪天气环境干扰。
[0081]
所述主机5通过左路相机数据线115、右路相机数据线125、左路激光器数据线215、右路激光器数据线225,分别与左路相机111、右路相机121、左路准直激光器211、右路准直激光器221连接,所述主机5内安装有用于断层形变解算软件,用于提取标记点、标定测量系统和解算测量数据。
[0082]
利用图1所示地壳断层三维形变自动监测系统,所述主机通过采集提取左路相机111、右路相机121、左路准直激光器211、右路准直激光器221中的信息,并利用主机5内安装的断层形变解算软件测量地壳断层三维形变,监测系统的安装架设方案如图2和图3所示,本发明所述的地壳断层三维形变自动监测方法包括以下步骤:
[0083]
步骤一、埋设观测墩:
[0084]
在大地断层7的一盘布设观测墩一61,在另一盘布设观测墩二62和观测墩三63,三个观测墩的空间分布呈三角形。
[0085]
步骤二、架设监测系统:
[0086]
在观测墩一61上安置标定台3,标定台3上架设机器视觉测量装置1,分别为左路机器视觉测量单元11和右路机器视觉测量单元12;在观测墩二62上架设左路激光发射单元21,在观测墩三63上架设右路激光发射单元22;调整左路准直激光器211发射的激光能够照
射在左路屏幕113上及右路准直激光器221发射的激光能够照射在右路屏幕123上;使用左路屏蔽筒41将左路发射装置外壳213和左路测量装置外壳114连接,使用右路屏蔽筒42将右路发射装置外壳223和右路测量装置外壳124连接;然后,接好相机和准直激光器的数据线和电源线,即通过左路相机数据线115、右路相机数据线125、左路激光器数据线(包括电源线)215、右路激光器数据线(包括电源线)225,分别将左路相机111、右路相机121、左路准直激光器211、右路准直激光器221连接到主机5上。
[0087]
步骤三、标定监测系统:
[0088]
本发明标定监测系统过程中需要获取光斑图像和提取标记点,其方法是:主机5控制左路激光发射单元21向左路机器视觉测量单元11发射激光束,激光在左路屏幕113上形成光斑;右路激光发射单元22向右路机器视觉测量单元12发射激光束,激光在右路屏幕123上形成光斑;主机5控制左路相机111和右路相机121启动,分别拍摄左路屏幕113和右路屏幕123上的激光光斑图像。使用主机内安装的用于断层形变解算软件处理获取的上述激光光斑图像,从中提取激光光斑特征点(即光斑中心)作为标记点。
[0089]
如图4所示,前后形变分量标定前,按照前述获取光斑图像方法获取一组光斑图像,左路机器视觉测量单元11的图像为i
l1
,右路机器视觉测量单元12的图像为i
r1
;调整标定台3的前后运动精密位移台31产生一个已知的前后运动量x;按照前述获取光斑图像方法再次获取一组光斑图像,左路机器视觉测量单元11的图像为i
l1
',右路机器视觉测量单元12的图像为i
r1
';按照前述提取标记点提取上述四幅图像中的标记点坐标c
l1
(x
l1
,y
l1
)、c
r1
(x
r1
,y
r1
)、c
l1
'(x
l1
',y
l1
')和c
r1
'(x
r1
',y
r1
');左路机器视觉测量单元11中标记点横坐标位移量δx
l1=
x
l1
'
‑
x
l1
,纵坐标位移量δy
l1=
y
l1
'
‑
y
l1
;右路机器视觉测量单元12中标记点横坐标位移量δx
r1=
x
r1
'
‑
x
r1
,纵坐标位移量δy
r1=
y
r1
'
‑
y
r1
;则监测系统的前后形变测量参数为则监测系统的前后形变测量参数为
[0090]
如图5所示,左右形变分量标定前,按照前述获取光斑图像方法获取一组光斑图像,左路机器视觉测量单元11的图像为i
l2
,右路机器视觉测量单元12的图像为i
r2
;调整标定台3的左右运动精密位移台32产生一个已知的左右运动量y;按照前述获取光斑图像方法再次获取一组光斑图像,左路机器视觉测量单元11的图像为i
l2
',右路机器视觉测量单元12的图像为i
r2
';按照前述提取标记点方法提取上述四幅图像中的标记点坐标c
l2
(x
l2
,y
l2
)、c
r2
(x
r2
,y
r2
)、c
l2
'(x
l2
',y
l2
')和c
r2
'(x
r2
',y
r2
');左路机器视觉测量单元11中标记点横坐标位移量δx
l2=
x
l2
'
‑
x
l2
,纵坐标位移量δy
l2=
y
l2
'
‑
y
l2
;右路机器视觉测量单元12中标记点横坐标位移量δx
r2=
x
r2
'
‑
x
r2
,纵坐标位移量δy
r2=
y
r2
'
‑
y
r2
;则监测系统的左右形变测量参数为为
[0091]
如图6所示,上下形变分量标定前,按照前述获取光斑图像方法获取一组光斑图像,左路机器视觉测量单元11的图像为i
l3
,右路机器视觉测量单元12的图像为i
r3
;调整标定台3的上下运动精密位移台32产生一个已知的上下运动量z;按照前述获取光斑图像方法再次获取一组光斑图像,左路机器视觉测量单元11的图像为i
l3
',右路机器视觉测量单元12的图像为i
r3
';按照前述提取标记点方法提取上述四幅图像中的标记点坐标c
l3
(x
l3
,y
l3
)、c
r3
(x
r3
,y
r3
)、c
l3
'(x
l3
',y
l3
')和c
r3
'(x
r3
',y
r3
');左路机器视觉测量单元11中标记点横坐标
位移量δx
l3=
x
l3
'
‑
x
l3
,纵坐标位移量δy
l3=
y
l3
'
‑
y
l3
;右路机器视觉测量单元12中标记点横坐标位移量δx
r3=
x
r3
'
‑
x
r3
,纵坐标位移量δy
r3=
y
r3
'
‑
y
r3
;则监测系统的上下形变测量参数为为
[0092]
步骤四、解算测量数据:
[0093]
测量时,左路机器视觉测量单元11观测到标记点坐标位移量为(δx
l
,δy
l
),右路机器视觉测量单元12观测到标记点坐标位移量为(δx
r
,δy
r
)。
[0094]
理想的情形是:当左路激光发射单元21的激光垂直于左路屏幕113,右路激光发射单元22的激光垂直于右路屏幕123时,换算成断层形变,则理想情形下断层前后形变量为:
[0095][0096]
理想情形下断层左右形变量为:
[0097][0098]
理想情形下断层上下形变量为:
[0099][0100]
实际上,左路激光发射单元21的激光无法严格地垂直于左路屏幕113,右路激光发射单元22的激光无法严格地垂直于右路屏幕123,前后形变量、左右形变量和上下形变量需进行补偿。
[0101]
使用前后形变量、左右形变量补偿上下形变量后,实际测量工况下断层上下形变量为:
[0102][0103]
使用上下形变量补偿前后形变量后,实际测量工况下断层前后形变量为:
[0104][0105]
使用上下形变量补偿左右形变量后,实际测量工况下断层左右形变量为
[0106][0107]
对本发明地壳断层三维形变自动监测系统测性能进行测试,其测量结果的重复性
如表1所示,使用精密位移台测试其线性度如表2所示。
[0108]
表1
[0109][0110]
表2
[0111][0112]
本发明的优势在于,使用一种技术手段实现地壳断层三维形变的自动监测,结构简单精度高,使用屏蔽筒隔离环境的具体天气条件的干扰,具有较强的环境适应性;本实施例中,三分量测量结果的重复性均优于0.005mm,1mm测量范围内线性度达到1.2%。
[0113]
尽管上面结合附图对本发明进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨的情况下,还可以做出很多变形,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1