一种火星着陆过程利用测速敏感器的姿态修正方法与流程
1.本发明涉及一种火星着陆过程利用测速敏感器的姿态修正方法,属于航天器自主导航和姿态确定技术领域。
背景技术:
2.火星探测任务的进入、降落与着陆段(entry,descent,and landing,简称edl)是火星探测器近7亿千米旅途的最后6、7分钟,是火星表面探测任务的关键阶段,也是最困难的阶段。edl技术也是火星表面探测任务的关键技术之一。从火星探测器以2万千米每小时的速度进入火星大气开始,经历大气减速,降落伞拖拽,动力减速等一系列的阶段,最终为了确保安全精确地降落在火星表面。
3.火星探测的失败案例中较多是由于火星着陆器在下降着陆过程中出现意外,导致整个探测任务的失败。苏联的火星
‑
6于1973年08月05日发射,着陆器在下降期间出现故障,失去了与地球的联系;美国1999年01月03日发射的火星极地着陆器,在着陆下降期间通信丧失,着陆器坠毁;欧空局在2003年6月2号发射的火星快车/猎兔犬
‑
2的火星着陆器也在着陆过程中坠毁。可见火星着陆探测edl过程技术是保证任务成功的关键技术,需要深入展开研究。
4.火星edl过程的伞降段动态很大,会使得惯性测量单元的测量精度急剧下降,从而导致惯导外推姿态误差精度下降。火星着陆巡视器配备了测距测速敏感器,传统意义上测距敏感器对高度进行修正,测速敏感器对速度进行三维速度进行修正,两者均不对姿态修正。在极端拉偏工况下,惯导外推姿态误差精度的降低会使得着陆时的水平速度难以满足指标要求。由于测速敏感器能提供垂向姿态的信息,如果借助于卡尔曼滤波算法直接利用测速敏感器对惯导外推的姿态进行修正,由于系统的不完全可观性,难以保证滤波收敛。
技术实现要素:
5.本发明要解决的技术问题是:克服现有技术的不足,提供了一种火星着陆过程利用测速敏感器的姿态修正方法,采用平行式定姿框架,在前台使用传统的惯性导航外推,得到惯性位置、速度和姿态,利用惯性位置和姿态获得引力方向在本体坐标系下的投影;在后台利用测速敏感器和惯性测量单元进行基准重构,得到另外一个引力方向在本体系下的投影。后台的引力方向和前台的引力方向进行实时监视和比对,一旦两者超过一定的阈值,则利用欧拉旋转原理对前台的引力方向进行旋转使得其和后台的引力方向重合,实现姿态的修正目的。该方法避免了测速姿态修正不完全可观带来的滤波发散问题,可以提高大动态飞行环境的惯性导航姿态精度,提高着陆指标。
6.本发明目的通过以下技术方案予以实现:
7.一种火星着陆过程利用测速敏感器的姿态修正方法,包括如下步骤:
8.s1、利用t
k
时刻惯性导航外推得到着陆器的惯性位置、姿态矩阵,确定t
k
时刻引力方向在着陆器本体系下的投影
9.s2、利用测速敏感器在t
k
和t
k+1
时刻的观测量估计t
k
和t
k+1
时刻着陆器的本体速度,然后获得t
k
时刻引力方向在惯性系下的投影;
10.s3、根据本体系到惯性系的姿态转换矩阵、t
k
时刻引力方向在惯性系下的投影,获得t
k
时刻测速敏感器估计的引力方向在本体系的投影计算与之间的夹角θ
k
,并构造旋转的欧拉轴i
k
;利用θ
k
和i
k
确定旋转四元数;
11.s4、根据所述旋转四元数和t
k
时刻惯导系统的姿态矩阵对应的四元数,获得修正后的姿态四元数。
12.上述火星着陆过程利用测速敏感器的姿态修正方法,优选的,s2中,根据测速敏感器的测量方程,估计测速敏感器在某一时刻的着陆器本体速度。
13.上述火星着陆过程利用测速敏感器的姿态修正方法,优选的,s3中,对某一时刻,根据θ
k
确定t
k
时刻需要的旋转角度θ
rot,k
,然后利用θ
rot,k
和i
k
确定旋转四元数。
14.上述火星着陆过程利用测速敏感器的姿态修正方法,优选的,t
k
时刻引力在着陆器本体系下的投影为:
[0015][0016]
其中,为t
k
时刻惯性系到本体系的姿态转换矩阵,为t
k
时刻惯性导航外推得到着陆器的惯性位置。
[0017]
上述火星着陆过程利用测速敏感器的姿态修正方法,优选的,t
k
时刻引力方向在惯性系下的投影为:
[0018][0019]
其中,为t
k
时刻惯性系到本体系的姿态转换矩阵,下标k表示该状态是t
k
时刻的值,为t
k+1
时刻的本体速度,为t
k
时刻的本体系速度,δt为导航周期,为t
k
时刻加计测量的非引力加速度;为本体系到惯性系的姿态转换矩阵。
[0020]
上述火星着陆过程利用测速敏感器的姿态修正方法,优选的,t
k
时刻测速敏感器估计的引力方向在本体系的投影为:
[0021][0022]
其中,为t
k
时刻惯性系到本体系的姿态转换矩阵,为t
k
时刻引力在惯性系下的投影。
[0023]
上述火星着陆过程利用测速敏感器的姿态修正方法,优选的,旋转的欧拉轴i
k
为:
[0024][0025]
本发明相比于现有技术具有如下有益效果:
[0026]
(1)大幅提高大动态飞行环境的惯性导航姿态垂向精度;
[0027]
(2)大幅提高大动态飞行环境的惯性导航垂向速度和水平速度估计精度;
[0028]
(3)采用比对判断和监视,提高了系统的可靠性;
[0029]
(4)计算简单,没有复杂矩阵运算,适宜星上计算。
附图说明
[0030]
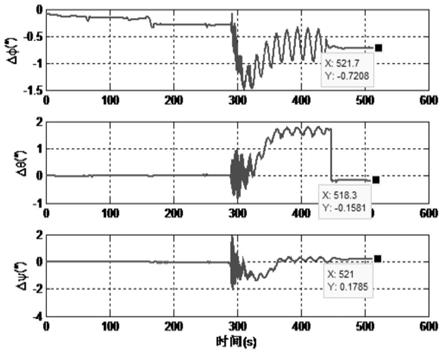
图1为本发明方法的姿态估计精度结果。
具体实施方式
[0031]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步详细描述。
[0032]
一种火星着陆过程利用测速敏感器的姿态修正方法,包括如下步骤:
[0033]
1)惯性导航引力方向估计
[0034]
记t
k
时刻惯性导航外推得到的惯性位置、惯性速度和姿态矩阵分别为其中下标k表示该状态是t
k
时刻的值,上标i表示该状态投影在惯性系下,为惯性系到本体系的姿态转换矩阵。在着陆过程中,如果不考虑高阶项,则引力方向和着陆器相对火星中心的位置反向。因此可以由惯性导航的位置和惯性导航姿态计算引力方向在本体系下的投影,记作由下式给出:
[0035][0036]
其中||
·
||表示求模。
[0037]
2)基于测速敏感器的引力方向估计
[0038]
2.1)测速敏感器一般由多个波束组成,每个波束测量沿着波束方向的速度。因此测速敏感器的测量方程可以写作:
[0039][0040]
其中为t
k
时刻的本体系速度,
[0041]
[0042]
上式中s为测速敏感器的波束个数,为测速敏感器第i个波束的在t
k
时刻的观测量,ν
(1),k
为测速敏感器第i个波束的在t
k
时刻的的测量噪声,p
v(i)
为第i个测速波束的安装向量。
[0043]
2.2)着陆器本体速度可以由测速敏感器的测量量估计得到。记t
k
时刻的本体速度估计为则有
[0044][0045]
值得注意的是,上式的实施要求矩阵b可逆,这意味着波束的个数s至少为3,且至少有3个波束的指向不共面。
[0046]
2.3)由测速敏感器的t
k+1
时刻的观测量y
k+1
,估计t
k+1
时刻的本体速度,记为由下式给出
[0047][0048]
2.4)由牛顿定律可知,惯性速度的变化量是由引力加速度和非引力加速度共同作用的结果。记为测速敏感器计算t
k
时刻引力方向在惯性系下的投影,则有
[0049][0050]
其中δt为导航周期,为t
k
时刻加计测量的非引力加速度。为本体系到惯性系的姿态转换矩阵,
[0051]
2.5)由公式(6)可以计算出t
k
时刻测速敏感器估计的引力方向在本体系的投影,记作由下式给出
[0052][0053]
3)这样就可以由第(1)式和第(7)式得到了引力方向的两个估计值。利用欧拉定律可知,可以构造一个欧拉轴i
k
,绕欧拉轴旋转某个角度使得这两个方向重合。其中构造旋转的欧拉轴i
k
可以由下式计算得到:
[0054][0055]
5)计算旋转角度和旋转四元数
[0056]
首先计算和的夹角θ
k
[0057][0058]
则t
k
时刻需要的旋转角度为θ
rot,k
,由下式给出
[0059]
[0060]
其中α为事先设定的阈值,对于火星着陆任务α取为1.5
°
。(10)式意味着如果θ
k
<α,则旋转的角度为0,这意味着不旋转,这是因为θ
k
的夹角很小,无需进行修正。这种方式对比了惯导导航的引力估计和基于测速敏感器的引力方向估计,这种采取比对和监视的方式,提高了系统的可靠性。
[0061]
式(8)和(10)给出构造的欧拉轴和旋转角,因此可以计算出旋转的四元数为
[0062][0063]
由(8)~(11)式可知,旋转四元数的计算方式简单,没有复杂矩阵运算,适宜星上计算。
[0064]
6)进行惯导姿态修正
[0065]
设t
k
时刻惯导系统姿态对应的四元数为q
ins,k
,修正后的四元数为q
k
,则有:
[0066][0067]
其中为四元数的乘法。由于垂向姿态计算和引力方向有关,因此进行修正以后可提高姿态垂向精度。此外,由于速度敏感器测量的速度投影与垂向姿态的投影计算得到垂向速度和水平速度,因此进行姿态修正可以提高垂向速度和水平速度估计精度。
[0068]
图1给出了姿态修正效果,分别给出了姿态三轴误差角曲线,在姿态修正以前的姿态误差大约为1.7
°
左右,修正完以后将姿态估计精度提高到1
°
以内。
[0069]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
[0070]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1