陶瓷制的柱状蜂窝结构体的检查方法及检查装置与流程
1.本发明涉及陶瓷制的柱状蜂窝结构体的检查方法及检查装置。
背景技术:
2.关于陶瓷制的柱状蜂窝结构体,由于在耐热性、耐热冲击性、耐氧化性这些方面表现优异,因此,广泛用作对来自内燃机、锅炉等的废气中含有的粒子状物质进行捕集的过滤器、废气净化用催化剂的催化剂载体。
3.通常,陶瓷制的柱状蜂窝结构体具备侧面和多个间隔壁,该多个间隔壁配置于该侧面的内周侧,并区划形成从第一底面趋向第二底面而在高度方向上延伸的多个隔室。例如通过如下工序而制造陶瓷制的柱状蜂窝结构体:利用挤出成型法对粘土状的坯料进行成型而获得柱状蜂窝成型体的工序,其中,对作为其构成材料的陶瓷原料的粉体和有机粘合剂、水等一起进行混炼而获得粘土状的坯料;以及对柱状蜂窝成型体进行烧成的工序。
4.在烧成之后,有时在柱状蜂窝结构体的侧面产生如下缺陷等:产生裂纹或者附着有异物。因裂纹的发生以及异物的附着而有可能导致柱状蜂窝结构体的强度降低、将柱状蜂窝结构体用于过滤器时的过滤性能降低、以及用于催化剂载体时的废气净化性能降低等。因此,需要检查柱状蜂窝结构体的侧面有无缺陷。
5.作为柱状蜂窝结构体的侧面的检查方法,已知如下方法,即,一边使柱状蜂窝结构体旋转,一边利用线阵传感器相机对侧面进行拍摄,由此检查有无缺陷。专利文献1(国际公开第2017/061318号)中公开了如下表面检查方法,即,通过利用照射方向及波段不同的2种照明光的拍摄、以及基于该拍摄结果而生成的2幅判定用图像的对比这一简便的方法,能够判定在蜂窝结构体的侧面是否形成有裂纹。
6.现有技术文献
7.专利文献
8.专利文献1:国际公开第2017/061318号
技术实现要素:
9.根据专利文献1的表面检查方法,以照射方向及波段不同的2种照明光对蜂窝结构体的侧面进行拍摄,并对基于该拍摄结果而生成的2幅判定用图像进行对比,由此,能够将裂纹和品质方面没有问题的波纹(表面起伏)区别开而防止过度检测。
10.如果柱状蜂窝结构体的形状为圆柱状,则使柱状蜂窝结构体以其中心轴为旋转轴进行旋转,由此能够将其与相机之间的距离保持恒定并进行拍摄。然而,柱状蜂窝结构体中还存在具有圆柱状以外的形状的柱状蜂窝结构体。如果使这种柱状蜂窝结构体以其中心轴为旋转轴进行旋转,则相机与柱状蜂窝结构体之间的距离发生变化,因此,需要研究应对该变化的对策。专利文献1中并未充分研究关于圆柱状以外的柱状蜂窝结构体的检查方法。
11.本发明是鉴于上述情况而完成的,在一个实施方式中,其课题在于,提供不仅适用于圆柱状而且还能够良好地适用于圆柱状以外的形状的陶瓷制的柱状蜂窝结构体的检查
方法。另外,在另一实施方式中,本发明的课题在于,提供适合实施上述检查方法的检查装置。
12.如果从底面侧观察圆柱状以外的形状的陶瓷制的柱状蜂窝结构体,则从底面的重心至外周侧面的距离发生变化。因此,如专利文献1启示的那样,如果一边使柱状蜂窝结构体旋转一边利用固定相机对柱状蜂窝结构体的侧面进行拍摄,则相机与柱状蜂窝结构体之间的距离会发生变化,因此会失焦。于是,需要一边使相机和柱状蜂窝结构体中的一者或二者移动以使相机与柱状蜂窝结构体之间的距离(工作距离)恒定一边进行拍摄,但是,越是要以高速进行检查,越会因移动时的振动等而导致拍摄的图像模糊。
13.本发明的发明人对此进行了研究,即,通过缩短曝光时间而抑制模糊。然而,根据专利文献1中启示的线阵传感器相机可知:即便缩短曝光时间,换言之,即便提高快门速度,也无法充分抑制图像的模糊。因此,本发明的发明人进一步反复进行了潜心研究,结果发现,如果像线阵传感器相机那样使用面阵相机,并一边以高速按动快门一边反复对短条状的狭窄拍摄范围进行拍摄,则能够获得模糊得到抑制的图像。本发明是基于上述见解而完成的,以下进行举例说明。
14.[1]一种检查方法,其是柱状蜂窝结构体的检查方法,
[0015]
所述检查方法的特征在于,包含以下工序:
[0016]
准备陶瓷制的柱状蜂窝结构体的工序,该柱状蜂窝结构体具有第一底面、第二底面及侧面;
[0017]
工序a,在该工序中,使侧面用面阵相机相对于所述柱状蜂窝结构体相对移动以使得侧面用面阵相机环绕所述柱状蜂窝结构体的侧面,并利用侧面用面阵相机对所述侧面以局部为单位反复进行拍摄,由此生成多幅短条状图像;以及
[0018]
工序b,在该工序中,基于通过工序a而获得的多幅短条状图像,判别所述侧面有无缺陷,
[0019]
通过工序a而生成的多幅短条状图像的数量为足以覆盖整个所述侧面的数量,
[0020]
侧面用面阵相机对所述侧面的局部进行拍摄以生成一幅短条状图像时的快门速度为10~1000μsec,
[0021]
每一幅短条状图像在长边方向上具有包含所述柱状蜂窝结构体的整个高度在内的长度,在短边方向上具有1~10mm的长度。
[0022]
[2]根据[1]中记载的检查方法,其特征在于,侧面用面阵相机环绕所述柱状蜂窝结构体的侧面时的平均周向速度为50~300mm/秒。
[0023]
[3]根据[1]或[2]中记载的检查方法,其特征在于,利用侧面用面阵相机对该侧面以局部为单位反复进行拍摄时的帧率为100~300hz。
[0024]
[4]根据[1]~[3]中的任一项记载的检查方法,其特征在于,在工序a中,从隔着侧面用面阵相机的互不相同的方向对所述侧面交替地照射第一光及第二光,并利用侧面用面阵相机对所述侧面以局部为单位反复进行频闪拍摄,由此使得侧面用面阵相机交替地生成光的照射方向不同的所述短条状图像。
[0025]
[5]根据[1]~[4]中的任一项记载的检查方法,其特征在于,侧面用面阵相机为单色面阵相机。
[0026]
[6]根据[1]~[5]中的任一项记载的检查方法,其特征在于,侧面用面阵相机的像
素分辨率为50μm/pix以下。
[0027]
[7]根据[1]~[6]中的任一项记载的检查方法,其特征在于,所述柱状蜂窝结构体的所述第一底面及所述第二底面为弧形。
[0028]
[8]根据[1]~[7]中的任一项记载的检查方法,其特征在于,在工序a中,当侧面用面阵相机环绕所述柱状蜂窝结构体的侧面时,以使得所述侧面与侧面用面阵相机之间的拍摄距离的变化处于
±
2mm以内的方式使侧面用面阵相机相对于所述柱状蜂窝结构体进行相对移动。
[0029]
[9]根据[1]~[8]中的任一项记载的检查方法,其特征在于,还包括以下工序,即,在实施工序a之前,测量所述第一底面的重心位置及所述第二底面的重心位置,对所述柱状蜂窝结构体的斜度进行调整以使得将所述第一底面的重心位置和所述第二底面的重心位置连结的直线相对于侧面用面阵相机的拍摄方向而接近垂直。
[0030]
[10]根据[1]~[9]中的任一项记载的检查方法,其特征在于,以如下方式执行工序a中的所述拍摄,即,使得多幅短条状图像分别具有相对于拍摄时刻为一幅前的光的照射方向相同的短条状图像、以及拍摄时刻为一幅后的光的照射方向相同的短条状图像而在所述柱状蜂窝结构体的侧面的周向上重叠3mm以上的部分。
[0031]
[11]一种检查装置,其用于实施[1]~[10]中的任一项记载的检查方法,
[0032]
所述检查装置的特征在于,具备:
[0033]
机械臂,该机械臂在末端具有机械手,该机械手具有能够从所述第一底面及所述第二底面把持所述柱状蜂窝结构体的一对把持面,所述一对把持面构成为能够一边从所述第一底面及所述第二底面把持所述柱状蜂窝结构体、一边使所述柱状蜂窝结构体以规定的旋转速度进行旋转;
[0034]
侧面用面阵相机;
[0035]
画面,该画面能够对所述多幅短条状图像进行显示;以及
[0036]
控制装置,该控制装置至少能够设定所述一对把持面的旋转速度以及侧面用面阵相机的快门速度。
[0037]
[12]根据[11]中记载的检查装置,其特征在于,具备:第一光照射器,该第一光照射器用于向所述侧面照射第一光;以及第二光照射器,该第二光照射器用于以相对于第一光隔着侧面用面阵相机的方式从不同的方向向所述侧面照射第二光。
[0038]
[13]根据[11]或[12]中记载的检查装置,其特征在于,具备位移计,该位移计用于测定所述侧面与侧面用面阵相机之间的拍摄距离,位移计构成为能够对侧面用面阵相机在工序a中环绕所述柱状蜂窝结构体的侧面的期间的该距离的变化量进行监视。
[0039]
[14]根据[11]~[13]中的任一项记载的检查装置,其特征在于,还具备:
[0040]
第一底面用面阵相机,该第一底面用面阵相机用于拍摄所述第一底面;以及
[0041]
第二底面用面阵相机,该第二底面用面阵相机用于拍摄所述第二底面,且配置于与第一底面用面阵相机对置的位置,
[0042]
所述检查装置构成为:在所述机械手把持所述柱状蜂窝结构体的状态下,能够基于由第一底面用面阵相机拍摄到的所述第一底面的图像以及由第二底面用面阵相机拍摄到的所述第二底面的图像而测量所述第一底面的重心位置以及所述第二底面的重心位置,并能够对机械臂的姿势进行校正以使得将所述第一底面的重心位置和所述第二底面的重
心位置连结的直线相对于侧面用面阵相机的拍摄方向而接近垂直。
[0043]
[15]根据[11]~[14]中的任一项记载的检查装置,其特征在于,
[0044]
还具备第一底面用面阵相机,该第一底面用面阵相机用于拍摄所述第一底面,
[0045]
所述检查装置构成为:在所述机械手把持所述柱状蜂窝结构体的状态下,能够基于所述第一底面侧的把持面的旋转轴的位置、以及根据由第一底面用面阵相机拍摄到的所述第一底面的图像而确定的所述第一底面的重心的位置,对所述第一底面的重心与所述第一底面侧的把持面的旋转轴之间在工具坐标上的x轴方向及y轴方向上的错位进行测量,并能够基于测量结果在x轴方向及y轴方向上与错位量相应地对所述机械臂的工具坐标中心进行校正。
[0046]
[16]根据[11]~[15]中的任一项记载的检查装置,其特征在于,
[0047]
还具备第一底面用面阵相机,该第一底面用面阵相机用于拍摄所述第一底面,
[0048]
所述检查装置构成为:在所述机械手把持所述柱状蜂窝结构体的状态下,能够基于由第一底面用面阵相机拍摄到的所述第一底面的图像,对所述柱状蜂窝结构体相对于目标检查位置在工具坐标上的z轴旋转角度的偏差进行测量,所述机械臂能够基于测量结果而使所述柱状蜂窝结构体与角度偏差量相应地进行z轴旋转。
[0049]
发明效果
[0050]
根据本发明的一个实施方式,能够提供不仅适用于圆柱状而且还能够良好地适用于圆柱状以外的形状的陶瓷制的柱状蜂窝结构体的检查方法。根据该检查方法,无论柱状蜂窝结构体的底面形状如何,都有助于迅速地检查柱状蜂窝结构体的侧面有无缺陷。
附图说明
[0051]
图1是示意性地示出贯通(
ウォールスルー
;wall through)型的柱状蜂窝结构体的立体图。
[0052]
图2是在与隔室延伸的方向平行的截面中观察贯通型的柱状蜂窝结构体时的示意性的截面图。
[0053]
图3是示意性地示出壁流(
ウォールフロー
;wall flow)型的柱状蜂窝结构体的立体图。
[0054]
图4是在与隔室延伸的方向平行的截面中观察壁流型的柱状蜂窝结构体时的示意性的截面图。
[0055]
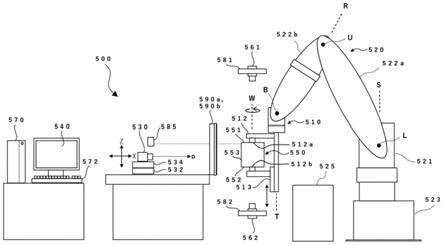
图5是用于说明本发明的一个实施方式所涉及的检查装置的结构的示意性的侧视图。
[0056]
图6是用于说明本发明的一个实施方式所涉及的检查装置的侧面用面阵相机、柱状蜂窝结构体、第一光照射器以及第二光照射器的位置关系的示意图。
[0057]
图7a是使得不改变光的照射方向而以短条状图像的周向(短边方向)的长度设为5mm且周向上无重叠的部分的方式反复对柱状蜂窝结构体的侧面进行拍摄时的、第n-1幅、第n幅以及第n+1幅的短条状图像的拍摄范围在该侧面的展开图上示出的示意图。
[0058]
图7b是使得不改变光的照射方向而以短条状图像的周向(短边方向)上的长度设为5mm且周向上重叠的部分设为3mm的方式反复对柱状蜂窝结构体的侧面进行拍摄时的、第n-1幅、第n幅以及第n+1幅的短条状图像的拍摄范围在该侧面的展开图上示出的示意图。
[0059]
图7c是使得一边交替地切换光的照射方向、一边以短条状图像的周向(短边方向)上的长度设为5mm且光的照射方向相同的短条状图像中的周向上重叠的部分设为3mm的方式反复对柱状蜂窝结构体的侧面进行拍摄时的、照射第一光时拍摄的第n-1幅和第n幅的短条状图像的拍摄范围以及照射第二光时拍摄的第m-1幅和第m幅的短条状图像的拍摄范围在该侧面的展开图上示出的示意图。
[0060]
图8是用于说明对直角度较大的柱状蜂窝结构体的斜度进行调整的工序的示意图。
[0061]
附图标记说明
[0062]
100
…
柱状蜂窝结构体,102
…
外周侧壁,103
…
侧面,104
…
第一底面,106
…
第二底面,108
…
隔室,112
…
间隔壁,200
…
柱状蜂窝结构体,202
…
外周侧壁,203
…
侧面,204
…
第一底面,206
…
第二底面,208a
…
第一隔室,208b
…
第二隔室,212
…
间隔壁,500
…
检查装置,510
…
机械手,512
…
卡盘,512a、512b
…
把持面,513
…
直动机构,520
…
机械臂,521
…
基部,522a
…
下侧臂,522b
…
上侧臂,523
…
基座,525
…
安置台,530
…
侧面用面阵相机,532
…
x工作台,534
…
z工作台,540
…
画面,550
…
柱状蜂窝结构体,551
…
第一底面,552
…
第二底面,553
…
侧面,561
…
第一底面用面阵相机,562
…
第二底面用面阵相机,570
…
控制装置,572
…
输入部,581
…
光照射器,582
…
光照射器,585
…
位移计,590a
…
第一光照射器,590b
…
第二光照射器。
具体实施方式
[0063]
接下来,参照附图对本发明的实施方式进行详细说明。本发明并不限定于以下实施方式,应当理解:可以在不脱离本发明的主旨的范围内基于本领域技术人员的常识而适当地实施设计的变更、改良等。
[0064]
(1.柱状蜂窝结构体)
[0065]
关于本发明所涉及的检查方法,在一个实施方式中,以具有第一底面、第二底面以及侧面的陶瓷制的柱状蜂窝结构体为检查对象。作为构成柱状蜂窝结构体的陶瓷,并未受到限定,例如优选为选自堇青石、多铝红柱石、锆石、钛酸铝、碳化硅、硅-碳化硅复合材料、氮化硅、氧化锆、尖晶石、印度石、假蓝宝石、刚玉、二氧化钛构成的组中的至少1种的陶瓷。并且,可以单独含有1种上述陶瓷,也可以同时含有2种以上的上述陶瓷。
[0066]
在图1及图2中分别举例示出了:能够用作贯通型的汽车用废气过滤器和/或催化剂载体的柱状蜂窝结构体(100)的示意性的立体图及截面图。该柱状蜂窝结构体(100)具备外周侧壁(102)和间隔壁(112),该间隔壁(112)配设于外周侧壁(102)的内周侧,且区划形成从第一底面(104)至第二底面(106)而形成流体的流路的多个隔室(108)。外周侧壁(102)的外表面形成柱状蜂窝结构体(100)的侧面(103)。关于该柱状蜂窝结构体(100),各隔室(108)的两端开口,从第一底面(104)流入至一个隔室(108)的废气在从该隔室通过的期间被净化并从第二底面(106)流出。此外,此处将第一底面(104)设为废气的上游侧、且将第二底面(106)设为废气的下游侧,不过,为了便于区别开第一底面及第二底面,也可以将第二底面(106)设为废气的上游侧、且将第一底面(104)设为废气的下游侧。
[0067]
图3及图4中分别举例示出了:能够用作壁流型的汽车用废气过滤器和/或催化剂载体的柱状蜂窝结构体(200)的示意性的立体图及截面图。该柱状蜂窝结构体(200)具备外
周侧壁(202)和间隔壁(212),该间隔壁(212)配设于外周侧壁(202)的内周侧,且区划形成从第一底面(204)至第二底面(206)而形成流体的流路的多个隔室(208a、208b)。外周侧壁(202)的外表面形成柱状蜂窝结构体(200)的侧面(203)。
[0068]
关于柱状蜂窝结构体(200),多个隔室(208a、208b)可以划分为:多个第一隔室(208a),它们从第一底面(204)延伸至第二底面(206),第一底面(204)开口而第二底面(206)被封孔;以及多个第二隔室(208b),它们配设于外周侧壁(202)的内侧,从第一底面(204)延伸至第二底面(206),第一底面(204)被封孔而第二底面(206)开口。并且,关于该柱状蜂窝结构体(200),第一隔室(208a)及第二隔室(208b)隔着间隔壁(212)而交替地相邻配置。
[0069]
如果向柱状蜂窝结构体(200)的上游侧的第一底面(204)供给含有烟灰等粒子状物质的废气,则废气被导入至第一隔室(208a),并在第一隔室(208a)内朝向下游前进。由于第一隔室(208a)的下游侧的第二底面(206)被封孔,因此,废气从区划出第一隔室(208a)和第二隔室(208b)的多孔质的间隔壁(212)透过而向第二隔室(208b)流入。粒子状物质无法从间隔壁(212)通过,因此,在第一隔室(208a)内被捕集并堆积。粒子状物质除去之后流入至第二隔室(208b)的清洁废气在第二隔室(208b)内朝向下游前进,并从下游侧的第二底面(206)流出。此外,此处将第一底面(204)设为废气的上游侧、且将第二底面(206)设为废气的下游侧,不过,为了便于区别开第一底面及第二底面,也可以将第二底面(206)设为废气的上游侧、且将第一底面(204)设为废气的下游侧。
[0070]
柱状蜂窝结构体的各底面形状并未特别限制,例如外周轮廓可以设为由单纯的闭曲线构成的底面形状。作为这种底面形状的典型例,可以举出:圆形、长圆形、椭圆形、卵形以及由多个不同的圆弧成分构成的形状之类的弧形。弧形是指:单纯的闭曲线中的、外周轮廓由不具有向内侧凹陷的部分的单纯的闭合凸曲线构成的形状。根据本发明所涉及的检查方法,圆形自不待言,还能够适当地对具有圆形以外的形状、即从底面的重心趋向外周轮廓延伸的线段的长度发生变化的形状的底面的柱状蜂窝结构体进行检查,在这一点上具有有益的效果。柱状蜂窝结构体的各底面的面积并未特别限制,例如可以设为1900mm2~97000mm2,典型地可以设为6400mm2~32000mm2。此外,圆形是指:设计的形状为圆形;圆形以外的形状是指:设计的形状为圆形以外的形状。这是因为:工业上无法避免尺寸误差,因此,实际上难以制作出数学方面严格意义上的圆形。
[0071]
与隔室的流路方向垂直的截面中的隔室的形状并未限制,优选为四边形、六边形、八边形或它们的组合。其中,优选为正方形及六边形。通过将隔室形状设为上述形状,使得流体向蜂窝结构体流动时的压力损失减小,催化剂的净化性能变得优异。
[0072]
隔室密度(每单位截面积的隔室数)也未特别限制,例如可以设为6~2000隔室/平方英寸(0.9~311隔室/cm2)。此处,通过一个底面中的隔室数(被封孔的隔室也计算在内。)除以除了外周侧壁以外的该底面的面积而计算出隔室密度。
[0073]
间隔壁的厚度也未特别限制,例如可以设为50μm~330μm。
[0074]
柱状蜂窝结构体的高度(第一底面至第二底面的长度)也未特别限制,例如可以设为40mm~300mm。
[0075]
可以通过公知的制作方法制作柱状蜂窝结构体,以下,举例进行说明。首先,对含有陶瓷原料、分散介质、造孔材料及粘合剂的原料组合物进行混炼而形成坯料,然后对坯料
进行挤出成型,由此制作出期望的柱状蜂窝成型体。然后,对柱状蜂窝成型体实施干燥、脱脂及烧成,由此制作出柱状蜂窝结构体。在形成封孔部的情况下,对柱状蜂窝成型体实施干燥,然后在柱状蜂窝成型体的两个底面形成规定的封孔部,在此基础上,对封孔部实施干燥。然后,对形成有封孔部的柱状蜂窝成型体实施脱脂及烧成,由此制作出柱状蜂窝结构体。
[0076]
柱状蜂窝结构体的用途并未特别限制。例如用于散热器、过滤器(例如gpf、dpf)、催化剂载体、滑动零部件、喷嘴、热交换器、电绝缘用部件以及半导体制造装置用元器件等各种产业用途。
[0077]
(2.检查方法及检查装置)
[0078]
根据本发明的一个实施方式,提供具有第一底面、第二底面以及侧面的陶瓷制的柱状蜂窝结构体的检查方法。另外,根据本发明的一个实施方式,提供适合实施该检查方法的检查装置。
[0079]
2-1.检查装置的概要
[0080]
图5中示出了用于说明适合实施本发明的一个实施方式所涉及的检查方法的检查装置(500)的结构的示意性的侧视图。在一个实施方式中,检查装置(500)可以具备:
[0081]
机械臂(520),其在末端具有机械手(510),该机械手(510)具有能够从第一底面(551)及第二底面(552)把持柱状蜂窝结构体(550)的一对把持面(512a、512b),所述一对把持面(512a、512b)构成为能够一边从第一底面(551)及第二底面(552)把持柱状蜂窝结构体(550)一边使其以规定的旋转速度进行旋转;
[0082]
侧面用面阵相机(530),其用于对上述柱状蜂窝结构体(550)的侧面(553)进行拍摄;
[0083]
画面(540),其能够对侧面用面阵相机(530)的拍摄结果、生成的图像进行显示;以及
[0084]
控制装置(570),其至少能够设定一对把持面(512a、512b)的旋转速度以及侧面用面阵相机(530)的快门速度。
[0085]
作为机械臂(520),例如可以优选使用6轴垂直多关节机器人或7轴垂直多关节机器人等产业用机器人。在一个实施方式中,机械臂(520)可以具有:基座(523);基部(521),其设置于基座(523)上,能够以沿铅直方向延伸的第一旋转轴s为中心进行转动;下侧臂(522a),其能够以设置于基部(521)的沿水平方向延伸的第二旋转轴l为中心进行转动;上侧臂(522b),其能够以设置于下侧臂(522a)的末端的沿水平方向延伸的第三旋转轴u为中心进行转动;以及机械手(510),其能够以设置于上侧臂(522b)的末端侧的沿水平方向延伸的第四旋转轴b为中心进行转动。
[0086]
上侧臂(522b)可以构成为:能够以沿上侧臂(522b)的长度方向延伸的第五旋转轴r为中心进行转动。机械手(510)可以构成为:能够以沿与一对把持面(512a、512b)垂直的方向延伸的第六旋转轴t为中心进行转动。
[0087]
机械手(510)可以具有:用于把持柱状蜂窝结构体(550)的卡盘(512)。卡盘(512)具有一对把持面(512a、512b),且构成为能够从第一底面(551)及第二底面(552)把持柱状蜂窝结构体(550)。卡盘(512)可以具有:用于对一对把持面(512a、512b)之间的间隔进行控制的直动机构(513)。作为直动机构(513),例如可以举出电动缸。
[0088]
一对把持面(512a、512b)可以构成为:能够以沿与一对把持面(512a、512b)垂直的方向延伸的第七旋转轴w为中心进行转动。一对把持面(512a、512b)构成为:能够借助伺服马达等驱动单元而以规定的旋转速度进行旋转。伺服马达可以搭载用于对一对把持面(512a、512b)的旋转角度等位移量进行检测的编码器。一对把持面(512a、512b)优选小于柱状蜂窝结构体(550)的底面(551、552)的尺寸。这是为了在利用相机(530)进行拍摄时不将一对把持面(512a、512b)的图像摄入。
[0089]
基部(521)、下侧臂(522a)、上侧臂(522b)及机械手(510)可以构成为:分别利用例如伺服马达等致动器进行驱动。另外,基部(521)、下侧臂(522a)、上侧臂(522b)及机械手(510)可以分别具备减速器、编码器以及传导机构。
[0090]
在一个实施方式中,检查装置(500)可以具备:第一光照射器(590a),其用于对柱状蜂窝结构体(550)的侧面(553)照射第一光;以及第二光照射器(590b),其用于以相对于第一光隔着侧面用面阵相机(530)的方式从不同的方向朝所述侧面(553)照射第二光。图6中示出了用于说明侧面用面阵相机(530)、柱状蜂窝结构体(550)、第一光照射器(590a)以及第二光照射器(590b)的位置关系的示意图。
[0091]
在一个实施方式中,检查装置(500)可以具备:第一底面用面阵相机(561),其用于对柱状蜂窝结构体(550)的第一底面(551)进行拍摄;以及第二底面用面阵相机(562),其配置于与第一底面用面阵相机(561)对置的位置,用于对柱状蜂窝结构体(550)的第二底面(552)进行拍摄。
[0092]
在一个实施方式中,检查装置(500)可以具备位移计(585),该位移计(585)用于对柱状蜂窝结构体(550)的侧面(553)与侧面用面阵相机(530)之间的拍摄距离进行测定。
[0093]
在一个实施方式中,检查装置(500)可以具有:x工作台(532),其能够使面阵相机(530)在x方向(水平方向)上移动;以及z工作台(534),其能够使面阵相机(530)在z方向(铅直方向)上移动。x方向可以设为例如与利用侧面用面阵相机(530)拍摄所述侧面(553)的拍摄方向d平行的方向。
[0094]
控制装置(570)构成为:能够对构成检查装置(500)的各设备的动作进行控制。以下,举例示出控制装置(570)能够执行的控制的内容。
[0095]
控制装置(570)可以构成为:对侧面用面阵相机(530)的操作条件(包含相机的快门速度在内的各种条件设定、拍摄的开始及停止等)进行控制。
[0096]
控制装置(570)可以构成为:能够在画面(540)对侧面用面阵相机(530)的拍摄结果、获得的图像进行显示。
[0097]
控制装置(570)可以构成为:能够对利用面阵相机(530)获得的图像进行图像处理,并基于其处理结果而判定有无缺陷。
[0098]
控制装置(570)可以构成为:能够对包括机械手(510)的动作、包含一对把持面(512a、512b)的旋转速度的动作以及直动机构(513)的动作在内的机械臂(520)整体的动作进行控制。因此,控制装置(570)可以具有:例如由机械臂(520)的动作程序、执行用于控制机械臂(520)的运算处理的微处理器等处理器、存储器及存储装置构成的运算装置、对驱动马达的电流进行控制的电流放大器以及与周边设备交流信息的接口。
[0099]
控制装置(570)可以构成为:能够对光照射器(590a、590b、561、562)的各种操作条件(on/off及输出等)进行控制。
[0100]
控制装置(570)可以构成为:能够对位移计(585)的各种操作条件(on/off等)进行控制。
[0101]
控制装置(570)可以构成为:能够对x工作台(532)的x方向上的移动以及z工作台(534)的z方向上的移动进行控制。x工作台及z工作台可以分别独立地借助马达等驱动单元而移动。例如,x工作台及z工作台可以构成为分别采用robo电动缸等电动致动器。电动致动器可以构成为包括直线引导件、滚珠丝杠及伺服马达等。伺服马达可以搭载用于对各工作台的位移量进行检测的编码器。
[0102]
检查装置(500)可以具有输入部(572),该输入部(572)用于输入用于进行由控制装置(570)执行的各种控制的指示和/或条件。输入部(572)可以构成为例如包括编程器、操作面板、键盘、触摸面板、数字键及鼠标等。还可以构成为:在画面(540)对由输入部(572)输入的指示和/或条件进行显示。
[0103]
2-2.工序a(拍摄及图像生成工序)
[0104]
在本发明的一个实施方式所涉及的检查方法中,实施如下工序a,即,使侧面用面阵相机(530)相对于柱状蜂窝结构体(550)相对移动以使得侧面用面阵相机(530)环绕柱状蜂窝结构体(550)的侧面(553),并利用侧面用面阵相机(530)对所述侧面(553)以局部为单位反复进行拍摄,由此生成多个短条状图像。
[0105]
在工序a中,在侧面用面阵相机(530)相对于柱状蜂窝结构体(550)进行相对移动以使得侧面用面阵相机(530)环绕柱状蜂窝结构体(550)的侧面(553)的期间,利用侧面用面阵相机(530)对所述侧面(553)以局部为单位反复进行拍摄。面阵相机与线阵传感器相机相比,能够在柱状蜂窝结构体(550)的周向上对较大的范围统一进行拍摄,因此,通过提高快门速度而能够获得在统一拍摄到的较大范围内模糊得以抑制的图像。作为侧面用面阵相机(530),可以为彩色相机及单色相机中的任一种相机,从获得高像素分辨率的观点考虑,优选为单色相机。
[0106]
使侧面用面阵相机(530)相对于柱状蜂窝结构体(550)相对移动以使得侧面用面阵相机(530)环绕柱状蜂窝结构体(550)的侧面(553)包括以下情形。
[0107]
·
将侧面用面阵相机(530)固定而使柱状蜂窝结构体(550)移动,以使得侧面用面阵相机(530)环绕柱状蜂窝结构体(550)的侧面(553)的情形。
[0108]
·
将柱状蜂窝结构体(550)固定而使侧面用面阵相机(530)移动,以使得侧面用面阵相机(530)环绕柱状蜂窝结构体(550)的侧面(553)的情形。
[0109]
·
使侧面用面阵相机(530)及柱状蜂窝结构体(550)共同移动,以使得侧面用面阵相机(530)环绕柱状蜂窝结构体(550)的侧面(553)的情形。
[0110]
使侧面用面阵相机(530)相对于柱状蜂窝结构体(550)相对移动以使得侧面用面阵相机(530)环绕柱状蜂窝结构体(550)的侧面(553)的方法并未限定,例如可以举出利用图5所示的检查装置(500)而实施的方法。
[0111]
首先,机械臂(520)进行如下动作,即,适当地对基部(521)、下侧臂(522a)、上侧臂(522b)及机械手(510)进行驱动,利用一对把持面(512a、512b)从第一底面(551)及第二底面(552)把持在安置台(525)上方的规定位置处载放的柱状蜂窝结构体(550)。此时,预先向机械手(510)告知一对把持面(512a、512b)的一个把持面(512a)的重心位置,由此能够以一对把持面(512a、512b)的一个把持面(512a)的重心位置与第一底面(551)的重心位置一致
的方式把持柱状蜂窝结构体(550)。可以利用直动机构(513)缩短一对把持面(512a、512b)之间的间隔而进行把持,另外,还可以设定把持力。
[0112]
将隔室延伸的方向设为水平方向而使得柱状蜂窝结构体(550)载放于安置台(525),由此,机械臂(520)能够利用一对把持面(512a、512b)从第一底面(551)及第二底面(552)把持柱状蜂窝结构体(550)。此时,可以将具有例如u字槽或v字槽的块体设置于安置台上,以使得柱状蜂窝结构体(550)的位置稳定,并以使得该槽与柱状蜂窝结构体(550)的侧面接触的方式载放柱状蜂窝结构体(550)。另外,在台(525)的顶板设置切口,预先使得机械臂(520)的下侧的把持面(512b)能够接近,由此,即便柱状蜂窝结构体(550)以隔室延伸的方向设为铅直方向的方式载放于安置台(525),机械臂(520)也能够利用一对把持面(512a、512b)把持柱状蜂窝结构体(550)。
[0113]
接下来,把持有柱状蜂窝结构体(550)的机械臂(520)使柱状蜂窝结构体(550)移动到规定的检查位置。然后,检查装置(500)一边使一对把持面(512a、512b)旋转,一边利用侧面用面阵相机(530)反复对柱状蜂窝结构体(550)进行拍摄。
[0114]
工业上生产的柱状蜂窝结构体(550)中存在直角度因尺寸误差而较大的柱状蜂窝结构体。如果是直角度为0的柱状蜂窝结构体(550),则当以第一底面(551)处于水平状态的方式把持柱状蜂窝结构体(550)时,柱状蜂窝结构体(550)的中心轴朝向铅直方向。然而,在直角度较大的柱状蜂窝结构体(550)的情况下,如果以第一底面(551)处于水平状态的方式把持柱状蜂窝结构体(550),则柱状蜂窝结构体(550)的中心轴朝向倾斜方向(参照图8(a))。因此,在柱状蜂窝结构体(550)的第一底面(551)附件的侧面和第二底面(552)附近的侧面,工作距离(wd)产生误差,拍摄的图像容易产生失焦部分。
[0115]
因此,优选地,在实施工序a之前执行如下工序,即,测量第一底面(551)的重心位置及第二底面(552)的重心位置,调整柱状蜂窝结构体的斜度,以使得将第一底面(551)的重心位置和第二底面(552)的重心位置连结的直线l相对于侧面用面阵相机(530)的拍摄方向d而接近垂直(参照图8(b))。柱状蜂窝结构体的斜度优选调整为使得直线l与拍摄方向d所成的角度α处于89
°
~90
°
(其中,0
°
≤α≤90
°
)的范围,更优选调整为使得角度α处于89.5
°
~90
°
的范围。另外,可以基于工作距离(wd)的误差而控制柱状蜂窝结构体的斜度。例如,可以调整柱状蜂窝结构体的斜度,以使得工作距离(wd)的最大误差为0.2mm以下。
[0116]
再次参照图5,为了实施对柱状蜂窝结构体(550)的斜度进行调整的工序,在一个实施方式中,检查装置(500)还具备:第一底面用面阵相机(561),其用于拍摄第一底面(551);以及第二底面用面阵相机(562),其用于拍摄第二底面(552),且配置于与第一底面用面阵相机(561)对置的位置。在一个实施方式中,检查装置(500)构成为:在机械手(510)把持柱状蜂窝结构体(550)的状态下,能够基于由第一底面用面阵相机(561)拍摄的第一底面(551)的图像以及由第二底面用面阵相机(562)拍摄的第二底面(552)的图像而测量第一底面(551)的重心位置及第二底面(552)的重心位置,对机械臂(520)的姿势进行校正,以使得将第一底面(551)的重心位置和第二底面(552)的重心位置连结的直线相对于侧面用面阵相机(530)的拍摄方向而接近垂直。通过该校正,能够获得失焦部分较少的图像。通过使机械臂(520)所具有的多个旋转轴(图示的机械臂中为s、l、u、r、b、t、w)中的一个或二个以上转动而能够利用机械臂(520)实现该校正。
[0117]
另外,在机械手(510)把持柱状蜂窝结构体(550)时,有时把持的位置发生偏移。因
此,在一个实施方式中,检查装置(500)可以构成为对该偏移进行校正。例如,检查装置(500)构成为:在机械手(510)把持柱状蜂窝结构体(550)的状态下,能够基于第一底面侧的把持面(512a)的旋转轴的位置以及根据由第一底面用面阵相机(561)拍摄的第一底面(551)的图像而确定的第一底面(551)的重心的位置来测量第一底面(551)的重心与第一底面侧的把持面(512a)的旋转轴之间在工具坐标上的x轴方向及y轴方向上的错位,基于测量结果,在x轴方向及y轴方向上与错位量相应地对机械臂(520)的工具坐标中心进行校正。通过使机械臂(520)所具有的多个旋转轴(图示的机械臂中为s、l、u、r、b、t、w)中的一个或二个以上转动而能够利用机械臂(520)实现该校正。
[0118]
例如,将柱状蜂窝结构体(550)的第一底面(551)中的圆弧中心(柱状蜂窝结构体的底面形状为由多个不同的圆弧成分构成的形状的情况下为各自的圆弧中心。每当旋转的圆弧切换时,进行工具坐标中心的切换。)作为机械手(510)的工具坐标中心,在使得一对把持面(512a、512b)以该圆弧中心为旋转轴进行旋转的情况下,能够与错位量相应地对工具坐标中心施加校正。通过该校正而能够获得如下优点,即,即便在柱状蜂窝结构体(550)未准确地载放于安置台(525)时、进行把持的期间把持位置发生偏移时,也能够以拍摄距离及柱状蜂窝结构体(550)的侧面(553)的法线方向的关系正确的状态进行拍摄。此外,通常,工具坐标上的x轴方向及y轴方向为与一对把持面(512a、512b)平行的方向。另外,“圆弧中心”是指:该圆弧描绘出的圆的中心。
[0119]
底面形状为圆形以外的、即具有从底面的重心趋向外周轮廓延伸的线段的长度发生变化的底面形状的柱状蜂窝结构体的情况下,开始拍摄时的侧面的朝向对于检查精度的提高也很重要。因此,在一个实施方式中,检查装置(500)可以构成为:对侧面的朝向的偏差进行校正。例如,检查装置(500)在机械手(510)把持柱状蜂窝结构体(550)的状态下基于由第一底面用面阵相机(561)拍摄的第一底面(551)的图像而测量柱状蜂窝结构体(550)相对于目标检查位置在工具坐标上的z轴旋转角度的偏差,基于测量结果,机械臂(520)使柱状蜂窝结构体(550)与角度偏差量相应地进行z轴旋转。通过使机械臂(520)所具有的多个旋转轴(图示的机械臂中为s、l、u、r、b、t、w)中的一个或二个以上转动而能够利用机械臂(520)实现z轴旋转。此外,通常,z轴旋转的旋转轴相当于一对把持面(512a、512b)的旋转轴w。
[0120]
第一底面用面阵相机(561)优选设置成第一底面(551)的法线方向与拍摄方向平行,以便提高测量精度。同样地,第二底面用面阵相机(562)优选设置成第二底面(552)的法线方向与拍摄方向平行,以便提高测量精度。作为第一底面用面阵相机(561)及第二底面用面阵相机(562)并未限定,例如可以使用200万~500万像素且具有分辨率为0.05~0.1mm/pix的性能的面阵相机。作为面阵相机,可以为彩色相机及单色相机中的任一者,利用单色相机进行拍摄便足矣。
[0121]
为了提高测量精度,优选地,一边从在第一底面(551)的上方设置的光照射器(581)向第一底面(551)照射光、一边利用第一底面用面阵相机(561)实施对第一底面(551)的拍摄。此外,为了提高测量精度,优选地,以各向同性的方式对由第一底面用面阵相机(561)拍摄的第一底面(551)照射来自光照射器(581)的光。例如,优选如下方法,即,作为光照射器(581)而采用环型照明或同轴照明等,并从第一底面(551)的正上方照射光。
[0122]
同样地,为了提高测量精度,优选地,一边从在第二底面(552)的下方设置的光照
射器(582)向第二底面(552)照射光、一边利用第二底面用面阵相机(562)实施对第二底面(552)的拍摄。此外,为了提高测量精度,优选地,以各向同性的方式对由第二底面用面阵相机(562)拍摄的第二底面(552)照射来自光照射器(582)的光。例如,优选如下方法,即,作为光照射器(582)而采用环型照明或同轴照明等,并从第二底面(552)的正下方照射光。
[0123]
作为光照射器(581、582)的光源,并未特别限制,可以举出:led、白炽灯、卤素灯等。关于照射的光的波长,只要是使得面阵相机(561、562)具有受光灵敏度的波长即可,并未特别限制。因此,也可以照射白色光。关于照射的光的输出也未特别限制,但是,为了提高定位精度,可以以第一底面(551)及第二底面(552)的照度为500lx以上、优选为1000lx以上的输出而照射光。
[0124]
侧面用面阵相机(530)的拍摄方向d并未限定,从提高检查精度的观点考虑,优选设为侧面(553)所处位置的法线n的方向或法线n的方向附近。例如,位于以一次快门开闭而拍摄的拍摄范围的中心的侧面位置的法线n和拍摄方向d所成的角度可以设为0
°
~5
°
,优选设为0
°
~2
°
。
[0125]
在工序a中,当使侧面用面阵相机(530)相对于柱状蜂窝结构体(550)相对移动以使得侧面用面阵相机(530)环绕柱状蜂窝结构体(550)的侧面(553)时,为了防止生成失焦图像,以所述侧面(553)与侧面用面阵相机(530)之间的拍摄距离的变化为
±
2mm以内、换言之、从拍摄开始至拍摄结束的期间的拍摄距离的变化为4mm以内的方式使侧面用面阵相机(530)相对于柱状蜂窝结构体(550)进行相对移动,该方式较为理想。拍摄距离的变化优选处于
±
3mm以内,更优选处于
±
2mm以内。可以利用位移计(585)监视拍摄距离的变化量。
[0126]
作为检查对象的柱状蜂窝结构体(550)的形状为圆柱状的情况下,只要一边使柱状蜂窝结构体(550)以其中心轴为中心进行旋转、一边利用固定的侧面用面阵相机(530)进行拍摄即可,由此容易将拍摄距离的变化抑制在上述范围内。另一方面,作为检查对象的柱状蜂窝结构体的形状为圆柱状以外的情况下,为了使侧面用面阵相机(530)相对于柱状蜂窝结构体(550)进行相对移动而使得拍摄距离落入上述范围内,需要进行与柱状蜂窝结构体的形状相应的复杂的操作。
[0127]
因此,例如考虑如下方法,即,关于图5所示的检查装置,预先从输入部(572)输入作为检查对象的柱状蜂窝结构体(550)的形状等动作条件,向侧面用面阵相机(530)及机械臂(520)告知拍摄中的动作,以使拍摄距离落入规定的范围内。例如,柱状蜂窝结构体(550)的底面形状为由多个不同的圆弧成分构成的形状的情况下,可以举出如下方法,即,针对各圆弧成分而设定机器人工具坐标(各圆弧部分的中心坐标、半径、开始角度、结束角度等),与被机械手(510)把持并旋转的柱状蜂窝结构体(550)的旋转角相应地使机械臂(520)的姿势发生变化,以使拍摄距离落入规定的范围内。作为其他方法,还可以举出如下方法,即,与被机械手(510)把持并旋转的柱状蜂窝结构体的旋转角相应地,使载放有侧面用面阵相机(530)的x工作台(533)在与拍摄方向平行的方向上移动,以使拍摄距离落入规定的范围内,由此代替机械臂(520)。
[0128]
另外,还可以举出如下方法,即,在工序a中,利用用于测定所述侧面(553)与侧面用面阵相机(530)之间的拍摄距离的位移计(585),对侧面用面阵相机(530)环绕所述侧面(553)的期间的该距离进行监视,并对机械臂(520)的姿势或x工作台(533)的位置进行反馈控制,以便将该距离保持在规定范围内。
[0129]
从迅速地实施检查且以高精度检测有无缺陷的观点考虑,优选将侧面用面阵相机(530)对所述侧面(553)的局部进行拍摄以便生成一幅短条状图像时的快门速度设为10~1000μsec。通过加快快门速度,能够获得模糊部分较少的图像,检查速度也有所提高,因此,快门速度(曝光时间)的上限优选为1000μsec以下,更优选为100μsec以下,进一步优选为50μsec以下。另一方面,快门速度的提高也是有限的,另外,从确保检查所需的亮度的观点考虑,快门速度(曝光时间)的下限优选为10μsec以上,更优选为20μsec以上,进一步优选为40μsec以上。
[0130]
在利用侧面用面阵相机(530)对所述侧面(553)以局部为单位反复进行拍摄时,各短条状图像具有:与柱状蜂窝结构体(550)的高度方向(隔室延伸的方向)平行的长边方向、以及与所述柱状蜂窝结构体的周向平行的短边方向。
[0131]
从检查的迅速性考虑,各短条状图像优选在长边方向上具有包含柱状蜂窝结构体(550)的整个高度在内的长度。如果利用面阵相机(530)拍摄一次的侧面(553)的范围为柱状蜂窝结构体(550)的整个高度,则只要使柱状蜂窝结构体(550)旋转一周,就能够生成整个侧面的检查图像。
[0132]
从提高缺陷的检查精度的观点考虑,各短条状图像优选在短边方向上具有1~10mm的长度。从短边方向上的长度较短则容易获得对焦的图像的观点考虑,各短条状图像的短边方向上的长度优选为10mm以下,更优选为8mm以下,进一步优选为6mm以下。另一方面,如果短边方向上的长度过短,则沿周向延伸的裂纹等缺陷无法收进一幅图像内,从而有时检测变得困难。因此,各短条状图像的短边方向上的长度优选为1mm以上,更优选为3mm以上,进一步优选为6mm以上,以便容易检测出沿周向延伸的裂纹等缺陷。
[0133]
在利用侧面用面阵相机(530)对所述侧面(553)以局部为单位反复进行拍摄时,优选设定侧面(553)的周向速度,以使得检查图像不会变得模糊、且能够迅速地进行检查。虽然并未限定,不过,可以按使侧面用面阵相机(530)相对于柱状蜂窝结构体(550)相对移动以使得侧面用面阵相机(530)环绕柱状蜂窝结构体(550)的侧面(553)时的平均周向速度为50~300mm/秒的方式进行该反复拍摄。如果是通常的柱状蜂窝结构体(550)的大小,则通过使平均周向速度处于该范围内而能够使检查所述侧面(335)整体所需的时间达到约5秒以下。鉴于检查的迅速性,平均周向速度的下限优选为50mm/秒以上,更优选为100mm/秒以上,进一步优选为300mm/秒以上。另一方面,如果平均周向速度过高,则快门速度相对于周向速度变慢,检查图像容易变得模糊。因此,平均周向速度的上限优选为300mm/秒以下,更优选为250mm/秒以下,进一步优选为200mm/秒以下。
[0134]
从以能够进行迅速的检查的期望的周向速度毫无遗漏地对柱状蜂窝结构体(550)的侧面(553)整体进行拍摄的观点考虑,利用侧面用面阵相机(530)对所述侧面(553)以局部为单位反复进行拍摄时的帧率优选为100~300hz。帧率较高则能够防止漏拍,因此,优选为100hz以上,更优选为200hz以上,进一步优选为300hz以上。但是,如果帧率过高,则相机的价格提升、或者无法在短条状图像的长边方向上确保足够的视野,因此,优选为600hz以下。此外,考虑到机械臂的动作轨迹的精度,更优选为400hz以下。
[0135]
为了高精度地检测出微细的缺陷,优选使用像素分辨率精细的相机。具体而言,优选使用视野的纵向及横向上的像素分辨率分别为50μm/pix以下(50μm/pix或者小于50μm/pix)的面阵相机。据此,例如能够检测出品质检查中要求的裂纹的宽度为50μm以上的裂纹。
此外,从能够检测出宽度较小的裂纹(例如25μm以上)的观点考虑,像素分辨率更优选为25μm/pix以下(25μm/pix或者小于25μm/pix)。像素分辨率的下限并未特别设定,从容易对焦的观点考虑,优选为15μm/pix以上(15μm/pix或者大于15μm/pix),20μm/pix以上(20μm/pix或者大于20μm/pix)。
[0136]
从容易检测出缺陷的观点考虑,优选一边向柱状蜂窝结构体(550)的侧面(553)照射光、一边进行侧面用面阵相机(530)的拍摄。具体而言,对照射的光的强度进行调节,以使柱状蜂窝结构体(550)的侧面(553)的照度达到1万lx以上,优选为10万lx以上,更优选为50万lx以上。对于照射有照射光的柱状蜂窝结构体(550)的侧面(553)的照度并未设置特别的上限,从经济性的观点考虑,柱状蜂窝结构体(550)的侧面(553)的照度优选为100万lx以下。
[0137]
只要侧面用面阵相机(530)具有受光灵敏度即可,向柱状蜂窝结构体(550)的侧面(553)照射的光的波长并未特别限制,例如可以照射350~800nm的光。也可以照射白色光。作为检查装置(500)所具有的侧面用的光照射器(590a、590b)的光源,并未特别限制,可以举出:led、白炽灯、卤素灯等。
[0138]
当利用侧面用面阵相机(530)对柱状蜂窝结构体(550)的侧面(553)进行拍摄时,以一次快门的开闭而能够拍摄的范围为在柱状蜂窝结构体(550)的高度方向上呈直线状延伸的细长范围。因此,使光照射器(590a、590b)实施线状照明在提高照度方面较为有效,从而构成优选方式。具体而言,向柱状蜂窝结构体(550)的侧面(553)照射的光优选利用长边方向沿与柱状蜂窝结构体(550)的高度方向平行的方向延伸的线状照明进行照射。并且,线状照明优选以照射侧面用面阵相机(530)的拍摄范围的方式设定光的照射方向。
[0139]
在照射光的情况下,优选从隔着侧面用面阵相机(530)的互不相同的方向对所述侧面(553)交替地照射第一光及第二光,并利用侧面用面阵相机(530)对所述侧面(553)以局部为单位反复进行频闪拍摄(参照图6)。据此,交替地生成光的照射方向不同的短条状图像,因此,容易检测出所述侧面(553)的局部沿着柱状蜂窝结构体(550)的高度方向(隔室延伸的方向)向径向偏离而产生的台阶状的裂纹。这是因为:台阶状的裂纹包括因光的照射方向而形成影子的情形、以及无法因光的照射方向而形成影子的情形,此时,通过形成影子而使得检测变得容易。
[0140]
在进行频闪拍摄时,控制装置(570)对侧面用面阵相机(530)发送表示输出以规定的帧率打开快门的指令的触发信号。另外,控制装置(570)根据侧面用面阵相机(530)的快门打开的时机对一对光照射器(590a、590b)分别交替地发送表示输出发光指令的触发信号。例如,可以将侧面用面阵相机(530)的帧率设为300hz、且将各光照射器(590a、590b)的发光频率设为150hz而进行频闪拍摄。
[0141]
如图6所示,优选在相对于利用侧面用面阵相机(530)对柱状蜂窝结构体(550)的侧面(553)进行拍摄时的拍摄范围的中心而对称的位置(典型的为左右位置)配置一对以上的光照射器(590a、590b)。即,各对光照射器(590a、590b)优选以照射角度θ1、θ2(照明光的光轴中心相对于位于拍摄范围的中心的侧面位置的法线n的角度)为相同角度(θ1=θ2)或相近角度(|θ1-θ2|=0
°
~10
°
)的方式相对于侧面(553)的法线n而对称配置。照射角度θ1、θ2并未限定,例如可以设为5
°
~30
°
的范围。此外,各对光照射器(590a、590b)的照射距离及光的强度也优选为相同程度(例如:成对的光照射器中的另一个光照射器的照射距离相对于一
个光照射器的照射距离的比值为0.9~1.1,成对的光照射器中的另一个光照射器的光的强度相对于一个光照射器的光的强度的比值为0.9~1.1)。
[0142]
工序a中的反复拍摄优选以如下方式进行,即,对于多幅短条状图像,拍摄时刻为一幅图像前的光的照射方向相同的短条状图像和拍摄时刻为一幅图像后的光的照射方向相同的短条状图像具有在柱状蜂窝结构体的侧面的周向上重叠的部分。具体而言,周向上重叠的部分优选设为3mm以上。这是因为:对柱状蜂窝结构体的品质而言,优选能够检测出沿周向延伸3mm以上的裂纹等缺陷。周向上重叠的部分可以设为4mm以上,也可以设为5mm以上。然而,如果周向上重叠的部分过长,则妨碍迅速的检查,因此,周向上重叠的部分为3~5mm的范围便足矣。
[0143]
图7a中,使得不改变光的照射方向而以短条状图像的周向(短边方向)上的长度设为5mm且周向上不存在重叠的部分的方式反复对所述侧面(553)进行拍摄时的、第n-1幅、第n幅以及第n+1幅的短条状图像的拍摄范围示意性地在所述侧面(553)的展开图上示出。该例中,在对第n-1幅的拍摄范围进行拍摄的期间,所述侧面(553)在周向上相对移动5mm,在对第n幅的拍摄范围进行拍摄的期间,所述侧面(553)在周向上相对移动5mm,在对第n+1幅的拍摄范围进行拍摄的期间,所述侧面(553)在周向上相对移动5mm。
[0144]
图7b中,使得不改变光的照射方向而以短条状图像的周向(短边方向)上的长度设为5mm且周向上重叠的部分设为3mm的方式反复对所述侧面(553)进行反复拍摄时的、第n-1幅、第n幅以及第n+1幅的短条状图像的拍摄范围示意性地在所述侧面(553)的展开图上示出。该例中,在对第n-1幅的拍摄范围进行拍摄的期间,所述侧面(553)在周向上相对移动2mm,在对第n幅的拍摄范围进行拍摄的期间,所述侧面(553)在周向上相对移动2mm,在对第n+1幅的拍摄范围进行拍摄的期间,所述侧面(553)在周向上相对移动2mm。
[0145]
图7c中,使得一边交替地切换光的照射方向、一边以短条状图像的周向(短边方向)上的长度设为5mm且在光的照射方向相同的短条状图像中的周向上重叠的部分设为3mm的方式反复对所述侧面(553)进行拍摄时的、照射第一光时拍摄的第n-1幅和第n幅的短条状图像的拍摄范围以及照射第二光时拍摄的第m-1幅和第m幅的短条状图像的拍摄范围示意性地在所述侧面(553)的展开图上示出。该例中,照射第一光时对第n-1幅的拍摄范围进行拍摄的期间,所述侧面(553)在周向上移动1mm,照射第二光时对第m-1幅的拍摄范围进行拍摄的期间,所述侧面(553)在周向上移动1mm,照射第一光时对第n幅的拍摄范围进行拍摄的期间,所述侧面(553)在周向上移动1mm,照射第二光时对第m幅的拍摄范围进行拍摄的期间,所述侧面(553)在周向上移动1mm。
[0146]
上述的图7a、图7b及图7c所示的例子中,考虑将周向上的长度为3mm以上的裂纹检测为缺陷。
[0147]
图7a所示的例子的情况下,如果在第n-1幅的短条状图像中存在局部被拍摄的周向上的长度为3mm的裂纹(554),则该裂纹(554)在第n幅的短条状图像中也只有局部被拍摄。因此,各短条状图像中,由于裂纹(554)的长度小于3mm,因此,在对短条状图像分别进行检查时无法将该裂纹(554)检测为缺陷。
[0148]
图7b所示的例子的情况下,如果在第n-1幅的短条状图像中存在局部被拍摄的周向上的长度为3mm的裂纹(554),则根据第n-1幅的短条状图像无法将该裂纹(554)检测为缺陷。然而,第n幅的短条状图像与第n-1幅的短条状图像在周向上重叠的部分为3mm,因
此,能够在第n幅的短条状图像中将该裂纹(554)检测为缺陷。
[0149]
图7c所示的例子的情况下,如果在第n-1幅的短条状图像中存在局部被拍摄的周向上的长度为3mm的裂纹(554),则根据第n-1幅的短条状图像无法将该裂纹检测为缺陷。然而,第n幅的短条状图像与第n-1幅的短条状图像在周向上重叠的部分为3mm,因此,能够在第n幅的短条状图像中将该裂纹(554)检测为缺陷。同样地,如果在第m-1幅的短条状图像中存在局部被拍摄的周向上的长度为3mm的裂纹(554),则根据第m-1幅的短条状图像无法将该裂纹(554)检测为缺陷。然而,第m幅的短条状图像与第m-1幅的短条状图像在周向上重叠的部分为3mm,因此,能够在第m幅的短条状图像中将该裂纹(554)检测为缺陷。
[0150]
利用侧面用面阵相机(530)反复进行拍摄的结果,能够使得生成的多幅短条状图像的数据与拍摄到该短条状图像的侧面(553)的部分的位置数据建立关联地存储于控制装置(570)内的存储装置。例如,利用侧面用面阵相机(530)开始拍摄,当一对把持面(512a、512b)开始旋转时,搭载于卡盘(512)的编码器以规定的时间间隔发出脉冲(编码器脉冲)。该编码器脉冲传送给控制部(570)。控制部(570)对侧面用面阵相机(530)发出拍摄指示,以使其与接受该编码器脉冲的时机同步地执行拍摄。通过这样在发出编码器脉冲的时机进行拍摄,能够生成各拍摄时的图像数据与编码器脉冲的脉冲值的数据集。基于脉冲值而能够确定与图像数据相应的侧面(553)的部分的位置,因此,能够使得图像数据和位置数据建立关联。
[0151]
另外,利用侧面用面阵相机(530)反复进行拍摄的结果,能够构成为在lcd、有机el显示器等显示装置的画面(540)对生成的多幅短条状图像进行显示。针对短条状图像,可以根据需要执行滤镜处理等图像处理,以使下道工序中的缺陷判别变得容易。作为滤镜处理,能举例示出二值化处理、阴影校正、收缩膨胀处理等。可以构成为由控制装置(570)执行图像处理。
[0152]
通过工序a而生成的多幅短条状图像的数量优选为足以覆盖柱状蜂窝结构体的整个侧面的数量,利用面阵相机对柱状蜂窝结构体拍摄一圈而获得的图像数据的容量较大。因此,如果在拍摄工序结束之后实施图像处理,则图像处理会消耗时间,导致检查速度降低。因此,可以每当生成一幅短条状图像时便与拍摄工序并行地执行图像处理。
[0153]
2-3.工序b(缺陷判别工序)
[0154]
在本发明的一个实施方式所涉及的检查方法中,实施工序b,在该工序中,基于通过工序a而获得的多幅短条状图像,判别所述侧面(553)有无缺陷。检查人员可以通过目视而实施判别有无缺陷的工序,不过,由于生成的短条状图像的数量庞大,因此,优选使控制装置(570)基于预先设定的基准而执行该工序。在一个实施方式中,基于多幅短条状图像而判别所述侧面(553)有无缺陷的工序包括:判别有无宽度为25μm以上的裂纹。此处,裂纹的宽度是指:一个裂纹中的与裂纹的长度方向正交的方向上的长度的最大值。
[0155]
在利用控制装置(570)判别有无宽度为25μm以上的裂纹的情况下,例如可以举出如下方法,即,对各短条状图像实施二值化处理,以便能够区别开存在裂纹等缺陷的部分和除此以外的部分,并利用二值化处理后的检查图像而判别有无宽度为25μm以上的裂纹。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1