生成动态占用网格的方法与流程
1.本公开涉及一种生成主车辆前方的动态占用网格的方法。
背景技术:
2.已经开发了高级驾驶员辅助系统(adas)来支持驾驶员以便更安全且舒适地驾驶主车辆。为了正确地执行并且由于安全原因,例如为了确定主车辆前方的车道中的无碰撞空间,需要监测主车辆前方的环境。
3.为了确定主车辆前方的这种无碰撞空间,已经提出了所谓的占用网格技术,其分析由车辆前方的网格限定的单元的状态,即,各个单元是否被占用、是否部分被占用、被遮蔽或空闲。占用网格通常基于车辆坐标系设计,其中网格的所有单元在该坐标系内具有相同的尺寸和相同的取向。即,关于车辆坐标系,常规占用网格的单元是位置不变的和时间不变的。
4.此外,占用网格通常在相对于主车辆的运动的横向和纵向方向上包括相同数量的单元。为了保证主车辆前方的无碰撞空间,单元的数量可以进一步在横向方向上动态增加,特别是如果在主车辆前方出现车道的强曲率时。因此,这种正方形或矩形网格必须包括需要由车辆控制系统的处理器和存储器处理的大量单元。
5.然而,例如与主车辆的辅助系统相关的实际关注区域(roi)通常仅覆盖正方形或矩形占用网格的一部分。例如,关注区域可以包括主车辆当前行驶的车道和位于该车道的右侧和左侧的小区域。
6.因此,常规占用网格通常包括大量不必要的单元,这些单元提供大量的与主车辆的系统无关的不必要的数据,尤其是在这种车道具有相当强的曲率的情况下。这些不必要的数据浪费了大量存储器并且可能使车辆控制系统的处理器变慢。因此,使用例如用于轨迹规划或用于上述辅助系统的常规占用网格技术伴随着高计算工作量。
7.因此,需要一种高度减少用于生成主车辆前方的占用网格的计算工作量的方法。
技术实现要素:
8.本公开提供一种计算机实现的方法、计算机系统和非暂时性计算机可读介质。在说明书和附图中给出了实施方式。
9.在一个方面,本公开涉及一种生成主车辆前方的动态占用网格的计算机实现的方法。根据该方法,经由主车辆的检测系统对主车辆前方的道路的车道的路线检测指示符,并且经由主车辆的计算机系统基于检测到的指示符确定基础区域,其中,该基础区域被限制到主车辆前方的关注区域。经由计算机系统通过划分基础区域来限定多个单元,以便形成占用网格。对于占用网格的每个单元,基于由检测系统提供的数据,经由计算机系统确定该单元是否至少部分地被可检测对象占用。
10.主车辆的检测系统可以包括视觉系统、雷达系统和/或lidar系统,而计算机系统可以包括处理器和存储器。由于基础区域是基于车道路线的指示符来确定的,因此限定网
格的单元的尺寸和数量的基础区域仅覆盖车辆前方的关注区域,即包括车道和车道的右侧和左侧上的某些区域。因此,与常规占用网格相比,网格的横向尺寸(即垂直于车道的路线)减小,这导致必须要考虑的单元数量较少。
11.因此,这种反映车道路线的动态占用网格需要较少的存储器,并且减少了处理动态占用网格的数据所需的计算量。相反,网格的分辨率(即每单位面积的单元数)可以增加而无需附加的存储器。然而,在这两种情况下,与常规占用网格相比,对于适应于车道路线的动态网格,由位于关注区域之外的单元生成的无用数据的数量大大减少。
12.此外,由动态占用网格提供的数据更适合于依赖或使用该数据的其他车辆系统,因为由网格提供的无用数据的数量被极大地减少,并因此所传送的数据关于相关性被进行预处理。因此,特别是通过减少传输数据的总量,改善了使用动态占用网格的其他车辆系统的性能。
13.该方法可以包括以下特征中的一个或更多个:
14.可以基于指示符经由计算机系统沿着车道来限定基准线,并且可以在基准线的两侧上确定基础区域。可以将该基准线划分为若干段,其中对于这些段中的每一段,可垂直于所述基准线限定相应行的单元。对于每行单元,可以限定预定的单元宽度和/或预定的单元数量。
15.对于每个段,可以分别在段的开始和结束处垂直于基准线限定两条相应的直线,并且可以将每条直线分成预定数量的区段,其中,相应区段的端点可以限定多个单元中的相应一个单元的角部。基准线的段可以具有预定长度。另选地,基准线的段可以具有可变长度,其中,该可变长度可以取决于所述段相对于主车辆的距离。当段相对于主车辆的距离增加时,该段的可变长度可以增加。
16.指示符可以包括车道的右和/或左边界。另选地或附加地,指示符可以包括用于车道中心的标记。指示符可以通过使用主车辆的视觉系统和/或雷达系统经由检测系统检测。基础区域可以根据视觉系统和/或雷达系统的预定范围来确定。
17.根据实施方式,基准线可以基于指示符经由计算机系统沿着车道来限定,并且可以在基准线的两侧上确定基础区域。基准线的限定(例如在车道的中心)可以用于使基础区域直接适应由指示符给出的车道路线。由于指示符可以例如通过主车辆的检测系统来处理,因此基准线可以是直接的手段,以便“动态地变形”基础区域,使得其反映车道的路线。此外,基准线可以由适应于测得的指示符数据的多边形表示。使用这样的基准线可以进一步减少执行该方法所需的计算工作量。
18.可将基准线划分为若干段,并且对于这些段中的每一段,可垂直于基准线限定相应行的单元。如果基准线包括一定数量的段,则可以简化动态占用网格的更新。对于占用网格的这种更新,大部分段和属于这些段的相应行的单元可以被保持,并且可以仅将靠近主车辆的段和相应单元用相对于主车辆在基准线的“远端”处的新段和相应单元来替换。此外,通过限定与基准线的段相对应的单元行,可以便于生成动态占用网格。
19.对于每一行单元,可以限定预定单元宽度,并且另选地或附加地,可限定预定数量的单元。预定单元宽度和预定单元数量可以包括恒定值。因此,与主车辆的关注区域相对应的基础区域的横向延伸可以由预定单元宽度和/或预定单元数量的限定来确定。单元宽度和每行的单元数量的恒定值可以进一步便于生成动态占用网格。
20.对于每个段,可以分别在该段的开始和结束处垂直于基准线限定两条相应的直线。每条直线可以进一步分成预定数量的区段。相应区段的端点可以限定多个单元中的相应一个单元的角部。垂直于基准线的每条直线的预定数量的区段可以是动态占用网格的横向延伸的表示,其遵循从一条直线到下一条直线的车道路线。通过使用区段的端点来限定占用网格的相应单元的角部可以进一步便于生成动态占用网格,并且可以减少所需的计算工作量。
21.基准线的段可以具有预定长度。在这种情况下,可以再次便于生成占用网格,并且可以进一步减少计算工作量。另选地,基准线的段可以具有可变长度,该可变长度可以取决于段相对于主车辆的距离。详细地,当段相对于主车辆的距离增加时,该段的长度可以增加。
22.也就是说,通过使用可变长度的段,可以在关注区域内调整单元的大小。例如,可能期望靠近主车辆的占用网格具有增加的分辨率,并且对于相对于主车辆具有更大距离的区域(例如对于诸如高级驾驶员辅助系统的其他车辆高级驾驶员辅助系统的适当性能)则需要较小的分辨率。由于被限制到主车辆的关注区域并且遵循主车辆前方的车道的行进路线的动态占用网格可以包括比常规占用网格少得多的数据并且可以需要更少的计算工作量,所以可以在关注区域的某些部分内增加网格的分辨率,而不会大量增加计算工作量,并且因此不用牺牲动态占用网格的最重要的优点。
23.车道路线的指示符可以包括车道的右和/或左边界,以及(另选地或附加地)车道中心的标记。因此,可用的地标可用作车道路线的指示符,其可容易地由主车辆中无论如何都可用的系统检测。因此,可以在不产生额外成本的情况下执行包括这些地标(即车道的边缘和/或车道中心的标记)的指示符的检测。
24.用于检测指示符的主车辆的检测系统可以包括主车辆的视觉系统和/或雷达系统。视觉系统和雷达系统是当今车辆中无论如何都可用的系统的示例。
25.基础区域可以根据视觉系统和/或雷达系统的预定范围来确定。也就是说,可以通过视觉系统和/或雷达系统的预定和已知范围纵向地(即沿着主车辆前方的车道)限制用于生成动态占用网格的基础区域,所述视觉系统和/或雷达系统可以提供车道路线的指示符,以便确定基础区域并限定动态占用网格。因此,可以基于沿车辆前方车道的预定长度来生成动态占用网格。这可以再次便于动态占用网格的整体生成。
26.在另一方面,本公开涉及一种计算机系统,所述计算机系统被配置成执行本文所述的计算机实现的方法的若干或所有步骤。
27.计算机系统可以包括处理单元、至少一个存储器单元和至少一个非暂时性数据存储装置。非暂时性数据存储装置和/或存储器单元可以包括用于指示计算机执行本文所描述的计算机实现的方法的若干或所有步骤或方面的计算机程序。
28.在另一方面,本公开涉及一种非暂时性计算机可读介质,其包括用于执行本文所描述的计算机实现的方法的若干或所有步骤或方面的指令。计算机可读介质可以被配置成:光学介质,例如光盘(cd)或数字多功能盘(dvd);磁介质,例如硬盘驱动器(hdd);固态驱动器(ssd);只读存储器(rom),例如闪存;等等。此外,计算机可读介质可以被配置成经由诸如互联网连接的数据连接可访问的数据存储装置。计算机可读介质例如可以是在线数据储存库或云存储。
29.本公开还涉及用于指示计算机执行本文所描述的计算机实现的方法的若干或所有步骤或方面的计算机程序。
附图说明
30.本文结合以下示意性示出的附图描述了本公开的示例性实施方式和功能:
31.图1是根据背景技术的主车辆前方的占用网格的示意性表示,
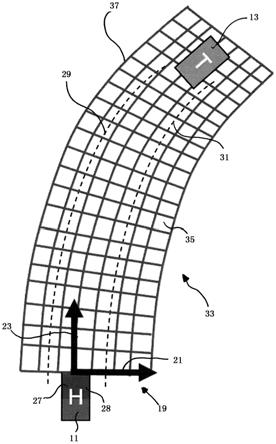
32.图2是根据本公开的跟随车道路线的动态占用网格的示意性表示,
33.图3示意性地描绘了根据本公开如何生成动态占用网格。
34.附图标记列表
35.11 主车辆
36.13 目标车辆
37.15 车道
38.17 常规占用网格
39.19 车辆坐标系
40.21 x轴
41.23 y轴
42.25 静态单元
43.27 检测系统
44.28 主车辆的计算机系统
45.29 车道的左边界
46.31 车道的右边界
47.33 动态占用网格
48.35 动态单元
49.37 基础区域
50.41 基准线
51.43 段(segment)
52.45 直线
53.47 区段(section)
54.49 区段的端点
具体实施方式
55.图1示意性地描绘了主车辆11和在主车辆11前方的同一车道15中行驶的目标车辆13。图1还描绘了根据背景技术的相对于车辆坐标系19限定的占用网格17的示意性表示,车辆坐标系19是笛卡尔坐标系,包括相对于车辆11在横向方向上延伸的x轴21和在主车辆11前方在纵向方向上延伸的y轴23。
56.根据背景技术的占用网格17包括沿x轴21和y轴23具有固定尺寸的多个单元25。即,每个单元25的长度和宽度是预定的。此外,占用网格17的单元25的数量也在横向和纵向方向上(即沿x轴21和y轴23)被预先确定。也就是说,根据背景技术的占用网格17总是包括在纵向方向上固定数量的单元25,并且可以包括在横向方向上预定数量的单元25,如图1所
示,而不管车道15的路线或主车辆11的运动。
57.目标车辆13的存在和位置由主车辆11的检测系统27检测。检测系统27包括视觉系统和/或雷达系统。检测系统27还被配置成检测车道15的左边界29和右边界31。主车辆11还包括计算机系统28,该计算机系统28包括处理器和存储器并且被配置成生成占用网格17。
58.如在根据背景技术的占用网格17的示意性表示中可以看出的,占用网格17包括许多远离主车辆11和目标车辆13暂时在其中行驶的车道15的单元25。也就是说,根据背景技术的占用网格17通常包括大量的如下单元,这些单元在主车辆11的实际移动和主车辆11的依赖于或使用由占用网格17提供的数据的系统的关注区域之外。通常,对于占用网格17内的多个单元25中的每一个,确定是否存在由检测系统27检测的目标或障碍物。换句话说,对于每个单元25确定其是否被障碍物或目标占用。对于图1所示的示例,至少部分被目标车辆13覆盖的单元25被认为被占用。
59.与主车辆11相关的关注区域包括车道15本身以及车道15附近的左边界29和右边界31之外的一些区域。因此,根据背景技术的占用网格17包括大量来自关注区域之外的区域的单元和不必要的数据。这种不必要的数据通常由主车辆11的计算机系统28来处理,并且需要相应的不必要的存储器和处理器性能。也就是说,当使用根据背景技术的占用网格17时,不必要地浪费了主车辆11的存储器和处理器的使用。
60.相比之下,图2描绘了根据本公开的动态占用网格33的示意性表示。动态占用网格33包括多个动态单元35,并且适应于主车辆11前方的车道15的路线。详细地,经由主车辆11的计算机系统28限定动态占用网格33的与主车辆11前方的关注区域相对应的基础区域37。为了限定基础区域37,由主车辆11的检测系统27检测车道15的左边界29和右边界31。由于左边界29和右边界31限制车道15,所以左边界29和右边界31用作主车辆11前方的车道15的路线的指示符。
61.如上所述,动态占用网格33的基础区域37旨在覆盖主车辆11的关注区域。为了适当地覆盖该关注区域,在基础区域37中包括超出左边界29和超出右边界31的一些区域。也就是说,相邻车道、人行道和/或类似沟渠的其他环境的一些部分也可能与主车辆11的进一步移动相关,并因此必须包括在基部区域37中。基础区域37被进一步划分为多个动态单元35,以便生成动态占用网格33。
62.当将如图1所示的根据背景技术的常规占用网格17与根据本公开的动态占用网格33进行比较时,单元35的总数与常规占用网格17的单元25的总数相比大大减少,而不会丢失由网格17、33提供的并且与例如主车辆11的辅助系统相关的相关信息。如果车道15包括强曲率,这尤其适用。总之,与常规占用网格17相比,当使用反映车道15的路线的动态占用网格33时,极大地减少了不必要的单元和数据的数量以及因此不必要的计算工作量。
63.图3详细描绘了如何通过主车辆11的计算机系统28来生成动态占用网格33的动态单元35。限定了大致在主车辆11和目标车辆13暂时行驶的车道15的中心延伸的基准线41。该基准线41由多项式表示,该多项式的系数从车道15的路线的指示符导出,该指示符由主车辆11的检测系统27测得,例如通过测量车道15的左边界29和右边界31的路线作为车道15的路线的指示符。
64.由多项式表示的基准线41被分成沿基准线41具有恒定长度δ的多个段43。对于每个段43,分别限定垂直于基准线41延伸的两条直线45。即,相邻段43具有共同的直线45,该
直线45界定在直线45之间的基准线41的两侧上延伸的各个区域。直线45进一步分成具有恒定长度δ的区段47。因此,各个区段47的端点49彼此之间也具有恒定的距离δ。
65.区段47的端点49用于限定相应动态单元35的角点(见图2)。详细地,彼此相邻并且属于第一直线45的区段47的两个端点49限定动态单元35的两个角点,而与第一直线45具有最短距离的相邻直线45的区段47的两个另外的端点49限定动态单元35的两个另外的角点。即,每个动态单元35的四个角点由属于相邻直线45并且彼此具有最短距离的区段47的相应端点49限定。
66.由于基准线41的曲率,动态单元35的尺寸在动态占用网格33内变化,如图2所示。另外,段43的长度可以沿着基准线41变化。例如,靠近主车辆11可以使用较短长度的段43,而当段43相对于主车辆11的距离增加时,该段43的长度可以增加。
67.在图3所示的示例中,每个段43限定一行动态单元35,其中,该行垂直于基准线41延伸。如果预定数量的单元35被用于属于某一段43的每行单元35,则动态占用网格33的恒定横向宽度被限定为对应于基础区域37的恒定横向延伸,该基础区域37对应于并覆盖主车辆11前方的关注区域。
68.另选地,每一行的单元35的数量可以适应于车道15和基准线41的曲率。详细地,在基准线41向其弯曲的第一侧上,例如在如图2和图3所示的右侧上,可以考虑更多数量的单元35,而在基准线41从其偏离的第二侧上,可以考虑更少数量的单元35。在图2中示出了这种情况,其中,在车道15的超出右边界31的“内侧”处存在更多的单元35,而在车道15的左边界29的“外侧”处考虑更少的单元35。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1