用于测量磁场梯度的设备和方法与流程
1.本发明总体上涉及磁传感器设备和测量磁场的方法的领域。本发明具体地涉及测量磁场梯度的设备和方法。
2.发明背景
3.用于测量磁场强度的设备是本技术领域中已知的。它们通常包含一个或多个霍尔元件或磁阻元件。磁传感器通常用于电流传感器、距离传感器、接近度传感器、接近度开关、线性位置或角位置传感器等,虽然磁感测提供了若干优点,诸如非接触测量、较少的机械磨损,但在外部干扰场存在的情况下,这些设备的准确性受到限制。
4.近年来,发现通过测量磁场梯度以及通过根据磁场梯度信号计算电流或距离或位置,而不是根据磁场分量值本身计算电流或距离或位置,可以很大程度上减少外部干扰场的影响。
5.总是存在改进和替代的余地。
技术实现要素:
6.本发明的实施例的目的在于提供磁传感器设备和/或用于测量磁场梯度的方法。
7.具体而言,本发明的实施例的目的在于提供磁传感器设备和/或能够更加准确地测量磁场梯度的方法。
8.本发明的实施例的目的在于提供磁传感器设备和/或用于测量具有改善的信噪比(snr)的梯度的方法。
9.本发明的实施例的目的在于提供磁传感器设备和/或用于更加准确地测量磁场梯度的方法,尽管温度变化和/或传感器设备上的应力变化。
10.本发明的实施例的目的在于提供磁传感器设备和/或用于以简单的方式(例如,无需求解一组方程式)更加准确地测量磁场梯度的方法,尽管温度变化和/或传感器设备上的应力变化。
11.本发明的实施例的目的在于提供电流传感器设备和/或基于磁场梯度测量电流的方法。
12.本发明的实施例的又一目的在于提供基于磁场梯度的距离传感器。
13.根据第一方面,本发明提供了一种用于测量磁场梯度的磁传感器设备,包括:半导体衬底;第一磁传感器,该第一磁传感器位于半导体衬底上的第一位置处,并被布置成用于提供指示按第一方向取向的第一磁场分量的第一传感器信号;第一偏置源,该第一偏置源被布置成用于使用第一偏置信号对第一磁传感器进行偏置;第一放大器,第一放大器被布置成用于对第一传感器信号进行放大并用于提供第一经放大的传感器信号;第二磁传感器,第二磁传感器位于半导体衬底上的、与第一位置不同的第二位置处,并被布置成用于提供指示按所述第一方向取向的第二磁场分量的第二传感器信号;第二偏置源,第二偏置源被布置成用于使用第二偏置信号对第二磁传感器进行偏置;第二放大器,第二放大器被布置成用于对第二传感器信号进行放大并用于提供第二经放大的传感器信号;温度传感器和
差分应力测量电路中的一者或两者,其中如果存在温度传感器时,则温度传感器位于半导体衬底上的第三位置,并且被配置成用于测量衬底的温度并且用于提供温度信号,以及其中,如果存在差分应力测量电路时,差分应力测量电路被配置成用于确定第一传感器位置与第二传感器位置之间的差分机械应力,并用于提供差分应力信号;至少一个模数转换器,用于转换第一信号和第二信号或由其导出的信号,并用于将温度信号进行数字化以获得温度值和/或用于将所述差分应力信号进行数字化以获得差分应力值;数字处理电路,数字处理电路连接在模数转换器的下游;其中数字处理电路被配置成用于获得所述温度值信号和所述差分应力值中的一者或两者;以及其中,磁传感器设备被配置成用于在确定从第一传感器信号导出(例如,仅从第一传感器信号导出)的第一信号或第一值与从第二传感器信号导出(例如,仅从第二传感器信号导出)的第二信号或第二值之间的差值之前,基于单个温度值t和/或差分应力值δ∑的预定义函数来调整以下各项中的至少一项:第二偏置信号、第二放大器增益、和经放大的第二传感器信号的数字值。优点在于测量磁信号的梯度而不是磁信号本身,因为梯度对外部干扰场不太敏感。因此,从所述梯度导出的值(例如电流值或距离值或其他值)也基本上对外部干扰场不敏感。
14.所提出的技术的主要优点在于,其中测量衬底的温度,或者其中测量第一传感器位置与第二传感器位置之间的差分应力,或者既测量温度又测量差分应力,该温度和/或应力差然后用于对第二信号路径的一部分进行调整,具体而言,在将源自第一磁传感器和第二磁传感器的信号进行组合(例如通过减法或除法或类似的方法)之前,调整第二偏置电流(例如,相对于第一偏置电流)和/或第二增益因子(例如相对于第一增益因子)和/或经放大的第二传感器信号的数字值,因为通过这样做,可以更准确地确定梯度。或者更具体而言,因为通过这样做,可以减少或基本上消除与两个磁传感器的灵敏度失配有关和与杂散场有关的误差项。
15.本发明部分地基于见解,即在两个磁传感器(例如两个霍尔元件)之间的灵敏度失配的情况下,杂散场的影响可能大于梯度信号本身,从而导致相对较大的测量误差,而该测量误差不能以简单的方式通过后处理从“经组合的信号”中移除。其中“经组合的信号”是指例如第一信号与第二信号的比率,或第一信号与第二(未校正的)信号的差值。
16.此外,对于测量温度(例如衬底温度)的实施例,(结合应力测量或不结合应力测量)所提出的解决方案部分地基于进一步的见解,即不需要测量第一传感器位置处和第二传感器位置处的温度,但测量衬底上的任意位置处的温度就足够了,并且第一磁传感器与第二磁传感器(例如霍尔元件)之间的温度差可以被表达(以非常好的近似)为单个所测得的温度的函数。发现该温度差可能取决于具体的芯片布局和取决于芯片封装,并且通常不是恒定的,而是随着绝对温度的变化而略微变化(参见图3(g))。
17.对于其中不测量温度而只测量应力差的实施例,所提出的解决方案部分地基于进一步的见解,即即使第一磁传感器和第二磁传感器的灵敏度可能不同,但这在很大程度上可以通过仅应力差的函数来校正,尤其是因为第一传感器位置和第二传感器位置之间的温度差会自动地引起机械应力差(例如由于材料的热膨胀)。在这些实施例中,所述温度传感器可以被省略。
18.重要的是要注意,本权利要求的所有实施例都基于相同的原理,即:(1)通过(例如,在模拟域中或在数字域中)确定差值来计算梯度;(2)在从第一信号(或从此导出的信
号)中减去第二信号(或从其导出的信号)之前,对第二信号(或从其导出的信号)进行校正/调整;以及(3)使用校正函数f(t)或f(t,
△
∑)或f(
△
∑)对第二值进行校正或调整,该校正函数f(t)或f(t,
△
∑)或f(
△
∑)不依赖于两个温度值(而最多依赖于单个温度值)。这可以以下表的方式示意性地表示,其中信号路径中的不同步骤用不同的行表示。
[0019][0020]
可以看出,在实施例中的每一个实施例中,“校正”或“调整”(用粗体表示)都是在减法(也用粗体表示)之前完成的,因为校正在矩阵中比减法高级。这些实施例显然是针对单个问题的不同解决方案,并且显然是基于相同的原理。
[0021]
在实施例中,预定义函数f(t)或f(t,
△
∑)或f(
△
∑)被选择为使得在操作期间,在预定义的温度范围内(例如,从
‑
40℃至+160℃,或者从
‑
20℃至+120℃),第一磁传感器的磁灵敏度s1与从第一磁传感器的输出到确定差值的第一信号路径的第一总增益的乘积基本上等于第二磁传感器的磁灵敏度s2与从第二磁传感器的输出到确定差值的第二信号路径的第二总增益的第二乘积。
[0022]
或者在数学上表达,预定义函数可以被选择使得s1*og1=s2*og2,其中s1是第一磁传感器的、以[伏特/特斯拉]为单位的磁灵敏度(当由第一偏置源进行偏置时),s2是第二磁传感器的磁灵敏度(当由第二偏置源进行偏置时),og1是在第一磁传感器的输出端处开始并通过第一放大器的所述第一信号路径的总增益,并且og2是在第二磁传感器的输出端处开始并通过第二放大器的所述第二信号路径的总增益。
[0023]
如将进一步所解释的,乘积s1*og1=s2*og2能以不同的方式使其相等,不同的方式例如通过调整偏置信号(参见例如图3(b)和图3(c))、通过调整放大器增益(参见例如图3(d)和图3(e))、或通过校正数字域中的值(参见例如图3(f))。这也可以被表达为:s1.a1.d1=s2.a2.d2,其中,a1、a2是模拟域中的第一、第二信号路径的放大,d1、d2是数字域中第一、第二信号路径的放大。
[0024]
在实施例中,差分应力测量电路包括:第一应力传感器,该第一应力传感器位于第一磁传感器附近并被配置成用于提供指示施加在第一磁传感器上的机械应力的第一应力信号;以及第二应力传感器,该第二应力传感器位于第二磁传感器附近并被配置成用于提供指示施加在第二磁传感器上的机械应力;以及减法电路,该减法电路被配置成用于确定第一应力信号与第二应力信号之间的差值,以获得所述差分应力信号,也称为“差分应力信
号”。
[0025]
其中“应力传感器”是指被配置成用于测量“机械应力”的传感器。
[0026]
在实施例中,温度传感器的第三位置(如果存在)与第一磁传感器位置不同,并且与第二磁传感器位置不同。
[0027]
在实施例中,温度传感器的第三位置(如果存在)基本上位于第一磁传感器与第二磁传感器之间的中间。
[0028]
在实施例中,预定义函数f(t)依赖于单个所测得的温度t,但不依赖于差分应力。在该实施例中,可以省略差分应力传感器电路。
[0029]
在实施例中,预定义函数f(
△
∑)依赖于差分应力,但不依赖于所测得的温度。在该实施例中,温度传感器可以被省略。
[0030]
在实施例中,预定义函数f(t,δ∑)既依赖于温度又依赖于微分应力,具体而言,依赖于差分应力和单个温度。
[0031]
在实施例中,预定义函数是在校准测试期间被确定的,或者是在相对较多(例如至少200个或至少500个)磁设备的鉴定或校准过程期间被确定的。
[0032]
在实施例中,数字处理电路被配置成用于通过使用单个所测得的温度的预定义函数f(t)调整第二偏置信号或调整第二放大器增益、以及通过对第一放大信号进行数字化以获得第一数字值,并通过对第二放大信号进行数字化以获得第二数字值、以及通过(在数字域中)计算第二数字值与第一数字值之间的差值,来确定磁场梯度。例如在图3(b)和图3(d)中图示出示例。
[0033]
在实施例中,数字处理电路被配置成用于通过调整第二偏置信号或通过使用单个所测量的温度的预定义函数f(t)调整第二放大器增益、以及通过(在模拟域中)生成第一经放大的传感器信号与第二经放大的传感器信号之间的差信号、并将差信号进行数字化,来确定磁场梯度。例如在图3(b)和图3(d)中图示出示例。
[0034]
在实施例中,数字处理电路被配置成用于通过将第一传感器信号进行放大并进行数字化以获得第一数字值,并且通过将第二传感器信号进行放大并进行数字化以获得第二数字值,并通过使用单个所测得的温度的预定义函数f(t)乘以第二数字值从而获得经校正的第二数字值,并且通过(在数字域中)计算第一数字值与经校正的第二数字值之间的差值,来确定磁场梯度。例如在图3(f)中图示出示例。
[0035]
在实施例中,第一偏置源是被配置成用于提供第一预定义电流信号的第一电流源,并且第二偏置源是被配置成用于提供可调的第二电流信号的可调电流源;并且其中,第一放大器被配置成用于以第一预定义增益进行放大,并且第二放大器被配置成用于以第二预定义增益进行放大;并且其中,第一数字值通过利用第一电流信号对第一磁传感器进行偏置、并且通过利用第一预定义增益对第一传感器信号进行放大、并且通过对经放大的信号进行数字化来获得;并且其中,第二数字值通过利用第二电流信号对第二磁传感器进行偏置、并且通过利用第二预定义增益对第二传感器信号进行放大、并且通过对经放大的信号进行数字化来获得;并且其中磁场梯度通过将第一数字值与第二数字值相减来计算;并且其中第二电流信号使用单个所测得的温度(但不是差分应力)的所述预定义函数f(t)、或使用单个所测得的温度和差分应力的所述预定义函数f(t,δ∑)、或使用差分应力(但不是温度)的所述预定义函数f(δ∑)进行调整。
[0036]
图3(b)、图4(b)、图5(b)示出此类磁传感器设备的示例。
[0037]
第二放大器增益可以与第一放大器增益基本上相等,或者可以与第一放大器增益不同。优点在于,经调整的电流也可以对放大器的任何增益失配进行补偿。
[0038]
梯度可以任选地乘以预定义因子。
[0039]
在特定的实施例中,通过将由所述预定义函数f()定义的电压施加到第二电流源的晶体管的栅极来调整第二电流信号。这提供优点在于,在生产期间通过执行校准测量可以很容易地确定预定义函数,并且在实际使用期间中设备可以使用相同的函数f()。
[0040]
在实施例中,第一偏置源是被配置成用于提供第一预定义电流信号的第一电流源,并且第二偏置源是被配置成用于提供可调的第二电流信号的可调电流源;并且其中,第一放大器被配置成用于以第一预定义增益对第一传感器信号进行放大以获得第一经放大的传感器信号,并且第二放大器被配置成用于以第二预定义增益对第二传感器信号进行放大以获得第二经放大的传感器信号;并且其中,磁传感器设备进一步包括模拟减法电路,模拟减法电路被配置成用于将第一放大信号与第二经放大的传感器信号进行相减以获得模拟差信号;并且其中,至少一个模数转换器被配置成用于对所述模拟差信号进行数字化,模拟差信号等于梯度或与梯度成比例;并且其中第二电流信号使用单个所测得的温度(但不是差分应力)的所述预定义函数f(t)、或使用单个所测得的温度和差分应力的所述预定义函数f(t,δ∑)、或使用差分应力(但不是温度)的所述预定义函数f(δ∑)进行调整。
[0041]
图3(c)、图4(c)、图5(c)示出此类磁传感器设备的示例。
[0042]
第二放大器增益可以与第一放大器增益基本上相等,或者可以与第一放大器增益不同。优点在于,经调整的电流也可以对放大器的任何增益失配进行补偿。
[0043]
经数字化的差值可以任选地乘以预定义因子。
[0044]
本实施例的优点在于,在模拟域中计算差值(通常为量化噪声的一半)。
[0045]
本实施例的主要优点在于,adc的范围可以完全用于对梯度信号进行数字化,这与例如图3(b)的传感器设备不同,在该传感器设备中,梯度仅占总数字信号的一小部分。以此方式,梯度(或从其中导出的值)的信噪比(snr)可以被显著地改善。
[0046]
在实施例中,第一偏置源是被配置成用于提供第一预定义电流信号的第一电流源,并且第二偏置源是被配置成用于提供第二预定义电流信号的第二电流源;并且其中,第一放大器被配置成用于以第一预定义增益进行放大,并且第二放大器被配置成用于以可调增益进行放大;并且其中,磁传感器设备进一步包括模拟减法电路,模拟减法电路被配置成用于将第一经放大的传感器信号与第二经放大的传感器信号进行相减以获得模拟差信号;并且其中,至少一个模数转换器被配置成用于对所述模拟差信号进行数字化,模拟差信号的结果等于梯度或与梯度成比例;并且其中第二放大器增益使用单个所测得的温度(但不是差分应力)的所述预定义函数f(t)、或使用单个所测得的温度和差分应力的所述预定义函数f(t,δ∑)、或使用差分应力(但不是温度)的所述预定义函数f(δ∑)进行调整。
[0047]
图3(e)、图4(e)、图5(e)示出此类磁传感器设备的示例。
[0048]
第二电流可以与第一电流基本上相等,或者可以与第一电流不同。优点在于,第二放大器的经调整的增益也可以对电流源的任何电流失配进行补偿。
[0049]
经数字化的差值可以任选地乘以预定义因子。
[0050]
本实施例的优点在于,在模拟域中计算差值(通常为量化噪声的一半)。
[0051]
本实施例的主要优点在于,adc的范围可以完全用于对梯度信号进行数字化,这与例如图3(b)的传感器设备不同,在该传感器设备中,梯度仅占总数字信号的一小部分。以此方式,梯度的信噪比(snr)或从其导出的值可以被显著地改善。
[0052]
在实施例中,磁传感器设备进一步包括具有预定义增益(b)的第三放大器,第三放大器被布置在模拟减法电路与至少一个模数转换器(adc)之间。
[0053]
在实施例中,第一偏置源是被配置成用于提供第一预定义电流信号的第一电流源,并且第二偏置源是被配置成用于提供第二预定义电流信号的第二电流源;并且其中,第一放大器被配置成用于以第一预定义增益进行放大,并且第二放大器被配置成用于以可调增益进行放大;并且其中,第一数字值通过利用第一电流信号对第一磁传感器进行偏置、并且通过利用第一预定义增益对第一传感器信号进行放大、并且通过对第一经放大的信号进行数字化来获得;并且其中,第二数字值通过利用第二电流信号对第二磁传感器进行偏置、并且通过利用第二增益对第二传感器信号进行放大、并且通过对第二经放大的信号进行数字化来获得;并且其中第二增益使用单个所测得的温度(但不是差分应力)的所述预定义函数f(t)、或使用单个所测得的温度和差分应力的所述预定义函数f(t,δ∑)、或使用差分应力(但不是温度)的所述预定义函数f(δ∑)进行调整。图3(d)、图4(d)、图5(d)示出此类磁传感器设备的示例。
[0054]
第二电流可以与第一电流基本上相等,或者可以与第一电流不同。优点在于,第二放大器的经调整的增益也可以对电流源的任何电流失配进行补偿。
[0055]
在实施例中,第一偏置源是被配置成用于提供第一预定义电流信号的第一电流源,并且第二偏置源是被配置成用于提供第二预定义电流信号的第二电流源;并且其中,第一放大器被配置成用于以第一预定义增益进行放大,并且第二放大器被配置成用于以第二预定义增益进行放大;并且其中,至少一个模数转换器被配置成用于对第一经放大的传感器信号进行数字化以提供第一数字值并且用于对第二经放大的传感器信号进行数字化以提供第二数字值;并且其中,数字处理电路被配置成用于将第二数字值与使用单个所测得的温度(但不是差分应力)的所述预定义函数f(t)、或使用单个所测得的温度和差分应力的所述预定义函数f(t,δ∑)、或使用差分应力(但不是温度)的所述预定义函数f(δ∑)数字校正因子(例如fcorr)相乘,以提供经校正的第二数字值;并且其中,数字处理电路进一步被配置成用于确定第一数字值与经校正的第二数字值之间的差值,以获得梯度。
[0056]
图3(f)、图4(f)、图5(f)示出此类磁传感器设备的示例。
[0057]
第二预定义电路可以基本上等于第一预定义电路,但是这不是绝对必需的。同样,第二放大器增益可以基本上等于第一放大器增益,但是这不是绝对必要的。
[0058]
在实施例中,磁传感器设备进一步包括连接至数字处理电路的非易失性存储器,所述非易失性存储器存储预定义函数f(t)或f(t,
△
∑)或f(
△
∑)的一个或多个系数或值或参数。
[0059]
预定义函数f()可以例如以查找表的形式存储、或者由分段线性函数表示,或者由一个或两个变量(温度t和/或差分应力δ∑)的一阶多项式表示、或者由一个或两个变量(温度t和/或差分应力δ∑)的二阶多项式表示、或者由一个或两个变量(温度t和/或差分应力δ∑)的三阶多项式表示、或者由具有至少四阶的多项式表示。
[0060]
例如可以在每个单独设备的校准过程期间,或通过模拟、或通过以已知方式限定
多个测试样本(例如至少100个或至少500个)来确定值或系数或参数。
[0061]
在实施例中,第一磁传感器是第一水平霍尔元件或包括第一水平霍尔元件,并且第二磁传感器是第二水平霍尔元件或包括第二水平霍尔元件。
[0062]
在实施例中,第一磁传感器是第一垂直霍尔元件或包括第一垂直霍尔元件,并且第二磁传感器是第二垂直霍尔元件或包括第二垂直霍尔元件。
[0063]
在实施例中,第一磁传感器包括第一集成磁聚集器以及被布置在第一磁聚集器的相对位置上的第一水平霍尔元件和第二水平霍尔元件,第一霍尔元件和第二霍尔元件的输出信号被组合(例如,被相加或被相减)以形成第一传感器信号;其中,第二磁传感器包括第二集成磁聚集以及被布置在第二磁聚集器的相对位置上的第三水平霍尔元件和第四水平霍尔元件,第三霍尔元件和第四霍尔元件的输出信号被组合(例如,被相加或被相减)以形成第二传感器信号;其中,第一集成磁聚集器与第二磁聚集器间隔开,并且其中第一水平霍尔元件、第二水平霍尔元件、第三水平霍尔元件和第四水平霍尔元件被布置在单个轴上。
[0064]
在图6、图7、图8和图11c中示出了此类磁传感器设备的示例。
[0065]
在存在第一应力传感器和第二应力传感器的情况下,第一应力传感器优选地被布置在第一集成磁聚集器(imc1)的附近,而第二应力传感器优选地被布置在第二集成磁聚集器(imc2)的附近。
[0066]
根据第二方面,本发明还提供了一种确定磁场梯度的方法,该方法包括以下步骤:a)利用第一偏置信号对第一磁传感器进行偏置;b)由第一磁传感器测量第一传感器信号;c)由第一放大器对第一传感器信号进行放大,以提供第一经放大的传感器信号;d)利用第二偏置信号对第二磁传感器进行偏置;e)由与第一磁传感器隔开的第二磁传感器测量第二传感器信号;f)由第二放大器对第二传感器信号进行放大,以提供第二经放大的传感器信号;g)测量以下各项中的至少一项:使用温度传感器测量温度和使用差分应力电路测量第一磁传感器和第二磁传感器所经历的应力差;h)在确定从第一传感器信号导出(例如,仅从第一传感器信号导出)的第一信号或第一值与从第二传感器信号导出(例如,仅从第一传感器信号导出)的第二信号或第二值之间的差值之前,基于单个所测得的温度或所测得的差分应力的预定义函数f()来调整以下各项中的至少一项:第二偏置信号(i2)、第二放大器增益、和第二经放大的传感器信号的数字值。
[0067]
预定义函数f()可以是单个所测得的温度(但不是差分应力)的函数f(t)、或者是单个所测得的温度和差分应力的函数f(t,
△
∑)、或是差分应力(但不是温度)的函数f(
△
∑)。
[0068]
在实施例中,步骤h)包括:使用所述预定义函数调整第二偏置信号和/或调整第二放大器增益;以及将第一放大信号进行数字化以获得第一数字值,并将第二放大信号进行数字化以获得第二数字值;并且(在数字域中)计算第二数字值与第一数字值之间的差值。
[0069]
在实施例中,步骤h)包括:使用预定义函数调整第二偏置信号和/或调整第二放大器增益;并且(在模拟域中)生成第一经放大的传感器信号与第二经放大的传感器信号之间的差信号;并且将差信号进行数字化以获得数字差值。
[0070]
在实施例中,步骤h)包括:施加第二偏置信号,并施加第二放大器增益,并对第一传感器信号进行放大并进行数字化,以获得第一数字值,并对第二传感器信号进行放大并进行数字化,以获得第二数字值,并将第二数字值与基于所述预定义函数的校正系数(例
如,fcorr)相乘,以获得经校正的第二数字值,并计算第一数字值与经校正的第二数字值之间的差值。
[0071]
根据第三方面,本发明还提供传感器布置,包括:磁传感器设备,用于根据第一方面测量所述磁场的梯度;以及磁源,用于产生非均匀磁场。
[0072]
在实施例中,磁源是具有至少两个磁极、或至少四个磁极、或至少六个磁极的磁体。
[0073]
在实施例中,磁源是具有至少两个磁极、或至少四个磁极的盘状或环形磁体。盘状或环形磁体可被轴向地或被直径地(diametrically)或径向地磁化。
[0074]
根据第四方面,本发明还提供了一种电流传感器设备,包括根据第一方面的磁传感器设备,其中数字处理电路进一步被配置成用于通过将梯度与预定义常数k相乘、或通过将梯度与温度的预定义函数k(t)相乘来计算电流值。
[0075]
k的值例如可以使用任选地具有线性插值的非易失性存储器中的查找表获得。
[0076]
预定义函数k(t)的值或系数或参数可以被存储在例如非易失性存储器中。可以例如使用数学公式(例如使用分段线性函数、或t的多项式函数,优选地温度t的一阶或二阶多项式)来计算函数k(t)。
[0077]
在实施例中(参见例如图10),电流传感器设备进一步包括用于传导待测电流的集成导体部分(也称为“集成电流传感器设备”),其中包含第一和第二磁传感器的半导体衬底相对于集成导体部分以预定义的位置和取向布置,并适于测量由流过集成导体部分的待测电流生成的磁场。
[0078]
集成电流导体可以被实现为铜引线框架的一部分,并且磁传感器设备的衬底可以相对于引线框架以预定义的方式布置。
[0079]
第一磁传感器和第二磁传感器可以相对于集成电导体部分的中心线或心脏线对称或不对称地定位。
[0080]
在实施例中,集成电流传感器包括没有集成磁聚集器(imc)的两个水平霍尔元件,例如如图9所图示。
[0081]
在实施例中,集成电流传感器包括没有集成磁聚集器的两个垂直霍尔元件,例如如图10所图示。
[0082]
在实施例中,集成电流传感器包括具有集成磁聚集器(imc)的两个水平霍尔元件,未示出。
[0083]
根据第五方面,本发明还提供了一种距离传感器设备,包括根据第一方面的磁传感器设备,其中数字处理电路进一步被配置成用于通过将梯度与预定义常数k相乘、或通过将梯度与温度的预定义函数k(t)相乘来计算距离。
[0084]
该预定义函数的值或系数或参数可以被存储在例如非易失性存储器中。可以例如使用数学公式(例如使用分段线性函数、或t的多项式函数,优选地温度t的一阶或二阶多项式)来计算函数k(t)。
[0085]
在所附独立和从属权利要求中阐述了本发明的特定和优选方面。来自从属权利要求的特征可以与独立权利要求的特征以及与其他从属权利要求的特征适当地结合,而不仅仅是如在权利要求中明确阐述的那样。根据此后所描述的(多个)实施例,本发明的这些方面和其他方面将是显而易见的,并且参考这些实施例阐明了本发明的这些方面和其他方
面。
附图说明
[0086]
图1(a)示出了本领域中已知的、用于测量磁场梯度的说明性传感器布置。
[0087]
图1(b)示出了本领域中已知的、用于图1(a)的传感器布置的偏置和读出的电路的示意性框图。
[0088]
图2图示出本发明底层的技术问题。
[0089]
图3(a)示出图1(a)的、具有温度传感器的传感器布置的变体。
[0090]
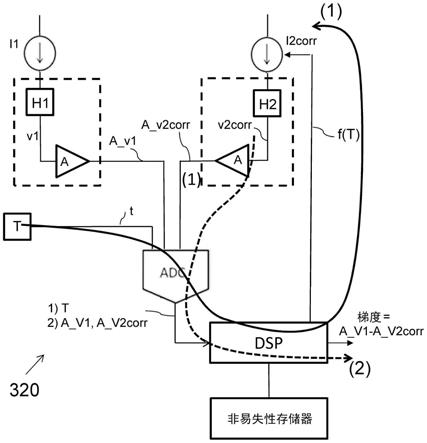
图3(b)示出根据本发明的实施例的图1(b)的电路的变体,该电路的变体使用温度传感器和可调电流源、以及数字减法(或数字域中的减法)。
[0091]
图3(c)示出根据本发明的实施例的图1(b)的电路的变体,该电路的变体使用温度传感器和可调电流源、以及模拟减法(或模拟域中的减法)。
[0092]
图3(d)示出根据本发明的实施例的图1(b)的电路的变体,该电路的变体使用温度传感器和可调放大器增益以及数字减法。
[0093]
图3(e)示出根据本发明的实施例的图1(b)的电路的变体,该电路的变体使用温度传感器和可调放大器增益以及模拟减法。
[0094]
图3(f)示出根据本发明的实施例的图1(b)的电路的变体,该电路的变体使用温度传感器以及数字域中的乘法和减法。
[0095]
图3(g)示出可以在图3(b)至图3(f)的实施例中使用的说明性校正函数。
[0096]
图4(a)示出了根据本发明的另一个实施例的图1(a)的、具有温度传感器和差分应力传感器的传感器布置的变体,该传感器布置的变体也可以被看作是图3(a)的、具有差分应力传感器的传感器布置的变体。
[0097]
图4(b)至图4(f)示出根据本发明的另一实施例的图3(b)至图3(f)的电路的变体,该电路的变体进一步使用差分应力信号。
[0098]
图5(a)示出根据本发明的另一个实施例的图4(a)的、没有温度传感器的传感器布置的变体。
[0099]
图5(b)至图5(f)示出图4(b)至图4(f)的、没有温度传感器的电路的变体。根据本发明的其他实施例,这些电路也可以被认为是图3(b)至图3(f)的、具有差分应力传感器的变体。
[0100]
图6(a)示出了根据本发明的另一实施例的具有两个磁传感器的传感器布置,每个磁传感器包括被布置在集成磁聚集器imc的相对侧上的两个水平霍尔元件。
[0101]
图6(b)示出根据本发明的实施例的图3(b)的电路的变体,该电路的变体还使用温度传感器和可调电流源、以及数字减法。
[0102]
图6(c)示出根据本发明的实施例的图3(c)的电路的变体,该电路的变体还使用温度传感器和可调放大器增益、以及数字减法。
[0103]
图7(a)示出根据本发明的实施例的图6(a)的、具有差分应力传感器的传感器布置的变体。
[0104]
图7(b)和图7(c)示出根据本发明的实施例的图6(b)和图6(c)的电路的变体,该电路的变体进一步使用差分应力信号。
[0105]
图8(a)示出根据本发明的实施例的图7(a)的、没有温度传感器的传感器布置的变体。
[0106]
图8(b)和图8(c)示出根据本发明的实施例的图7(b)和图7(c)的、没有温度传感器的电路的变体。
[0107]
图9(a)和图9(b)图示出根据本发明的实施例的磁电流传感器,该磁电流传感器是基于根据本发明的原理使用具有两个水平霍尔元件的衬底对磁体的测量。
[0108]
图10(a)和图10(b)图示出根据本发明的实施例的集成磁电流传感器,该磁电流传感器是基于根据本发明的原理使用具有两个垂直霍尔元件的衬底对磁场梯度的测量。
[0109]
图11(a)示出用于测量磁体相对于衬底的距离的传感器布置。
[0110]
图11(b)示出由两个传感器针对在图11(a)所示的x轴上的各个位置、针对相对于衬底可移动的磁体的两个位置可测量的磁场分量bx的绘图。
[0111]
图11(c)是根据本发明的实施例的图11(a)的传感器布置的实现方式的示意性表示,其中每个磁传感器包括用于测量磁场分量bx的两个水平霍尔元件和imc。
[0112]
图11(d)是根据本发明的实施例的图11(a)的传感器布置的另一实现方式的示意性表示,其中每个磁传感器包括用于测量磁场分量bx的垂直霍尔元件。
[0113]
图12(a)示出了根据本发明的实施例的图示出测量磁场梯度的方法的通用流程图。
[0114]
图12(b)示出了图12(a)的方法的更详细的版本,该版本针对将第二偏置源或第二放大器增益作为温度和/或差分应力的函数进行调整、并且其中在模拟域中将传感器信号相减、并且然后进行数字化的情况。
[0115]
图12(c)示出了图12(a)的方法的更详细的版本,该版本针对将第二偏置源或第二放大器增益作为温度和/或差分应力的函数进行调整、并且其中在数字域中将传感器信号相减的情况。
[0116]
图12(d)示出了图12(a)的方法的更详细的版本,该版本针对利用预定义的偏置源对两个磁传感器进行偏置、并且其中利用预定义增益对信号进行放大、并且其中在数字域中将传感器信号相减的情况。
[0117]
各附图仅是示意性而非限制性的。在附图中,出于说明性目的,要素中的一些要素的尺寸可被放大且未按比例绘制。权利要求中的任何附图标记不应被解释为限制范围。在不同的附图中,相同的附图标记指代相同或相似的要素。
具体实施方式
[0118]
将就具体实施例并且参考特定附图来描述本发明,但是本发明不限于此而仅由权利要求书来限定。所描述的附图仅是示意性的且是非限制性的。在附图中,出于说明性目的,要素中的一些要素的尺寸可被放大且未按比例绘制。尺度和相对尺度不对应于对本发明的实施的实际减少。
[0119]
此外,说明书中和权利要求中的术语第一、第二等等用于在类似的要素之间进行区分,并且不一定用于在时间上、空间上、以排名或以任何其他方式描述顺序。应理解,如此使用的术语在适当的情况下是可互换的,并且本文中所描述的本发明的实施例能够以与本文中所描述或解说的不同的顺序来进行操作。
[0120]
此外,说明书和权利要求中的术语顶部、下方等等用于描述性目的并且不一定用于描述相对位置。应当理解,如此使用的术语在适当的情况下是可互换的,并且本文中所描述的本发明的实施例能够以与本文中所描述或图示的取向不同的取向进行操作。
[0121]
要注意,权利要求中使用的术语“包括”不应被解释为限定于其后列出的装置;它并不排除其他要素或步骤。因此,该术语应被解释为指定如所提到的所陈述的特征、整数、步骤或组件的存在,但不排除一个或多个其他特征、整数、步骤或组件、或其群组的存在或添加。因此,表述“包括装置a和b的设备”的范围不应当被限定于仅由组件a和b构成的设备。这意味着对于本发明,该设备的仅有的相关组件是a和b。
[0122]
贯穿本说明书对“一个实施例”或“实施例”的引用意指结合该实施例所描述的特定的特征、结构或特性被包括在本发明的至少一个实施例中。因此,短语“在一个实施例中”或“在实施例中”贯穿本说明书在各个地方的出现并不一定全部指代同一实施例,而是可以指代同一实施例。此外,在一个或多个实施例中,如通过本公开将对本领域普通技术人员显而易见的,特定的特征、结构或特性能以任何合适的方式进行组合。
[0123]
类似地,应当理解,在本发明的示例性实施例的描述中,出于精简本公开和辅助理解各发明性方面中的一个或多个发明性方面的目的,本发明的各个特征有时被一起编组在单个实施例、附图或其描述中。然而,该公开方法不应被解释为反映要求保护的发明要求比每一项权利要求中明确记载的特征更多的特征的意图。相反,如所附权利要求所反映,发明性方面存在于比单个前述公开的实施例的全部特征更少的特征中。因此,具体实施方式之后所附的权利要求由此被明确纳入本具体实施方式中,其中每一项权利要求本身代表本发明的单独实施例。
[0124]
此外,尽管本文中所描述的一些实施例包括其他实施例中所包括的一些特征但不包括其他实施例中所包括的其他特征,但是如本领域技术人员将理解的那样,不同实施例的特征的组合旨在落在本发明的范围内,并且形成不同实施例。例如,在所附的权利要求书中,所要求保护的实施例中的任何实施例均能以任何组合来使用。
[0125]
在本文中所提供的描述中,阐述了众多具体细节。然而,应当理解,可以在没有这些具体细节的情况下实施本发明的实施例。在其他实例中,公知的方法、结构和技术未被详细示出,以免混淆对本描述的理解。
[0126]
在本文档中,当参考图3时,是指图3(a)至图3(g)的所有图。同样,当参考图4时,是指图4(a)至图4(f)的所有图。
[0127]
在本文档中,附图标记“t”既用于指示温度传感器,又用于指示从其获得的温度信号。有时使用小写字母“t”指示模拟温度信号,并且使用大写字母“t”指示数字温度信号,但并不总是这样区分。应从上下文中应明确旨在哪种含义。
[0128]
在本文档中,附图标记"σ1"通常用于指示第一应力信号,指示由第一磁传感器施加的机械应力。同样,附图标记"σ2"通常用于指示第二应力信号,指示施加在第二磁传感器上的机械应力。附图标记"δσ"通常用于指示σ1与σ2之间的模拟差值,而附图标记“δ∑”通常用于指示与该模拟差值信号相对应的数字值。
[0129]
在本文档中,附图标记“i1”既用于指示第一电流源,又用于指示第一电流信号。应从上下文中应明确旨在哪种含义。
[0130]
在本文档中,附图标记"a1"既用于指示第一放大器,又用于指示第一放大器增益。
应从上下文中应明确旨在哪种含义。
[0131]
在本文档中,附图标记"s1"用于指示第一磁灵敏度或第一应力传感器。应从上下文中应明确旨在哪种含义。
[0132]
在本文档中,符号"f(.)"或"f()"用于指示函数,而不明确指定该函数的参数。它可以例如是单个所测得的温度值的函数f(t),或者是单个温度和差分应力的函数f(t,δ∑),或者是差分应力的函数f(
△
∑),其中t是所测得的温度,
△
∑是差分应力。
[0133]
在本发明中对“电流源”作出引用的情况下,意味着能够向节点提供电流的元件或电路基本上与该节点的电压无关。通常,电流源具有相对较大的输出阻抗,例如至少1k欧姆、或至少10k欧姆。
[0134]
在本文档中,“应力差信号”和“差分应力信号”作为同义词使用。
[0135]
在该文档中,术语arctan函数或atan2函数指的是反正切函数。不熟悉atan2函数(或“2参数反正切”函数)的读者可以例如参考https://en.wikipedia.org/wiki/atan2了解更多信息。在本发明的上下文中,公式arctan(x/y)、atan2(x,y)、arccot(y/x)被认为是等效的。
[0136]
在本文档中,术语“磁传感器设备”或“传感器设备”是指包括衬底(优选为半导体衬底)的设备,该衬底包括至少两个“磁传感器元件”。传感器设备可被包括在封装(也被称为“芯片”)中,但这不是绝对必需的。
[0137]
如本文中所使用的术语“磁传感器”或“磁传感器结构”或“磁传感器布置”可指能够测量诸如霍尔效应或磁阻(mr)效应之类的一种或多种磁效应的一个或多个传感器元件。磁阻效应的非限制性示例包括gmr(巨磁阻)、cmr(庞磁阻)、amr(各向异性磁阻)或tmr(隧穿磁阻)。取决于上下文,术语“磁传感器”可指单个磁敏元件(例如,水平霍尔元件或垂直霍尔元件),或者可指(例如,布置在惠斯通电桥中的或布置成与集成磁聚集器(imc)相邻的)一组磁性元件,或者可指进一步包括以下各项中的一项或多项的子电路:偏置电路、读出电路、放大器、模数转换器等。
[0138]
在本发明中,表述“磁灵敏度”是指如例如在公式:v=s*b中使用的值“s”,其中v=电压信号,s=磁灵敏度,b=磁场强度。磁灵敏度可以用[伏特/特斯拉]表达。
[0139]
在本发明中,表述“电流相关的磁灵敏度”是指如例如在公式:v=s*i*b中使用的值“s”,其中v=电压信号,s=电流相关的磁灵敏度,i=电流磁场强度,b=磁场强度。电流相关的磁灵敏度可以用[伏特/(安培特斯拉)]表达。
[0140]
本发明涉及测量磁场梯度或磁场差的设备和方法。
[0141]
图1(a)示出了本领域中已知的、用于测量磁场梯度的传感器布置100。该传感器布置包括沿着预定义的轴线x间隔开距离dx的两个水平霍尔元件h1、h2。第一霍尔元件h1位于位置x1,并且测量按与衬底垂直的z方向取向的磁场分量bz1。第二霍尔元件h2位于位置x2处,并且测量同样按与衬底垂直的z方向取向的磁场分量bz2。
[0142]
图1(b)示出了具有两个电流源的经典偏置电路、以及包括数字器的读出电路、以及处理电路的示意表示。
[0143]
按z方向(与半导体衬底垂直)取向的磁场分量bz沿着x方向(与半导体衬底平行)的磁场梯度dbz/dx可以被确定为:
[0144]
dbz/dx~δbz=(bz2
‑
bz1)
ꢀꢀꢀ
[1]
[0145]
其中符号~是指“与
……
成比例”。
[0146]
使用梯度信号而不是单个磁场分量值的主要原因之一在于,梯度信号对均匀的外部干扰场高度不敏感。该优点在其他专利文献中也进行了描述(例如wo98/54547或wo2014/029885a1),并且被越来越多地用于工业或汽车应用的磁位置传感器的领域,通常与多极(例如四极或六极)环形或盘状磁体结合使用。
[0147]
实际上,使用梯度往往还有助于减少定位误差的影响,因为通常情况下,如果一个信号增加,另一信号就会减少,因此梯度基本上保持相同。并且这同样适用于传感器的灵敏度失配:传感器的灵敏度或多或少相同就足够了,因为灵敏度失配在很大程度上可以通过计算梯度信号来补偿。此外,在这些应用的许多应用中,甚至梯度的绝对值也是不重要的,而是两个梯度的比率值是重要的。例如,在角位置或线性位置传感器中,其中角位置被计算为两个梯度的比率的反正切函数。这些传感器对磁体的退磁效应和/或温度效应也是高度鲁棒的。
[0148]
多年来,这些发展使梯度测量磁传感器领域中的技术人员相信,通过测量基于梯度测量的量,结果更加准确,因为梯度对外部磁场不敏感,并且开发者不必那么担心磁源的缺陷、定位误差、灵敏度失配、温度变化等,因为这些都在本质上被梯度和/或被两个梯度的比率应对。
[0149]
然而,本发明的发明人发现,如果梯度信号本身相比于杂散场是相对小的,该推理是不正确的。在本发明的实施例中,杂散场是第一传感器和第二传感器两者共用的场部分。
[0150]
图2图示出在图1(b)的示意性框图中,如何常规地处理两个bz场分量,即在位置x1处测得的bz1和在距x1间隔距离δx的位置x2处测得的bz2。假设信号bz1是(例如由磁体感应出的)信号bz1m加上杂散场分量bzext的总和,因此bz1=bz1m+bzext,并且同样地,bz2=bz2m+bzext。进一步假设第一霍尔元件h1以第一偏置电流i1偏置,并且第一霍尔元件h1根据以下公式提供与偏置电流i1和所施加的磁场分量bz1的乘积成比例的电压信号v1:
[0151]
v1=s1.i1.bz1
ꢀꢀꢀ
[4]
[0152]
其中s1表示第一霍尔元件的“电流相关的磁灵敏度”(用[伏特/(特斯拉*安培)]表示),
[0153]
并且第二霍尔元件h2以第二偏置电流i2偏置,并且第二霍尔元件h2提供与偏置电流i2成比例的电压信号v2,并且第二霍尔元件h2根据以下公式提供与偏置电流i2和所施加的磁场分量bz2的乘积成比例的电压信号v2:
[0154]
v2=s2.i2.bz2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
[5]
[0155]
其中s2表示第二霍尔元件的“电流相关的磁灵敏度”(用[伏特/(特斯拉*安培)]表示)。
[0156]
假设模数转换器(adc)将这些信号分别转换为第一数字值v1和第二数字值v2,那么处理电路(例如dsp)将梯度计算为v2与v1之间的差值,该差值可表示如下:
[0157]
梯度=v2
‑
v1
ꢀꢀꢀꢀꢀꢀꢀ
[6]
[0158]
梯度=s2.i2.(bz1m+bzext)
‑
s1.i1.(bz2m+bzext)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
[7]
[0159]
现在假设第一偏置电流i1约等于第二偏置电流i2,并且s1.i1约等于s2.i2,那么表达式[7]可近似为:
[0160]
梯度≈(s2
‑
s1).i1.bzext+(s1.i1).(δbzm)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
[8]
[0161]
其中≈是指“约等于”。
[0162]
从该表达式[8]中可以看出,第二项是真实的梯度项,该梯度项确实与所施加的偏置电流i1和磁场差δbz成比例,但令人惊讶的是,计算出的梯度值还具有意料之外的误差项,该误差项与传感器位置处的杂散场bzext乘以灵敏度不匹配度(s2
‑
s1)成比例。
[0163]
如上文所述,在杂散场值基本等于零的情况下,误差项可以忽略不计,但在杂散场值bzext大于δbzm值的系统中,误差项就会变大,这在一些应用中确实是如此。
[0164]
为了减少或最小化使用单个梯度的系统的误差项,本发明提出在从第一模拟信号或第一数字值中减去第二偏置源和/或第二放大器和/或第二数字值之前,使用预定义函数相对于第一偏置源和/或第一放大器和/或第一数字值动态地调整第二偏置源和/或第二放大器和/或第二数字值。
[0165]
更具体地,本发明提出了一种具有独立设备权利要求的特征的磁传感器设备,并提出了一种具有独立方法权利要求的特征的测量磁场梯度的方法。为了充分理解和领会所提出的解决方案,公开了以下附加的见解。
[0166]
本发明的发明人想到了进一步的见解,即为了减少方程[8]的误差项,不需要将两个灵敏度都调整到预定义的绝对值,而将一个灵敏度调整到与另一个灵敏度基本上相等就足够了。该进一步的见解允许他们找到比例如ep3109658中提出的解决方案更简单的解决方案,在ep3109658中,每个磁传感器均被提供有温度传感器和机械应力传感器,并且其中磁场的绝对值是通过求解一组数学方程式来计算出的。
[0167]
在本发明中,基本上提出了三种解决方案:
[0168]
i)其中测量单个温度t,但不测量机械应力,并且其中将第二偏置源和/或第二信号路径作为所测得的温度的函数f(t)来进行调整的解决方案(参见例如图3(a)至图3(g),以及对于在本文中被称为“双盘结构”的传感器结构而言,参见例如图6(a)至图6(c));
[0169]
ii)其中测量差分应力、但不测量温度、并且将第二偏置源和/或第二信号路径作为所测得的应力差的函数f(δ∑)来进行调整的解决方案(对于具有两个水平霍尔元件的传感器结构而言,参见例如图5(a)至图5(f);以及对于在本文中被称为“双盘结构”的传感器结构而言,参见例如图8(a)至图8(c));
[0170]
iii)其中测量单个温度t、并且还测量差分应力、并且其中将第二偏置源和/或第二信号路径作为温度和所测得的应力差两者的函数f(t,δ∑)来进行调整的解决方案(例如,参见图4(a)至图4(f),以及对于在本文中被称为“双盘结构”的传感器结构而言,参见例如图7(a)至图7(c)),
[0171]
但当然,本发明并不限于这些特定的传感器结构,并且所提出的原理也可以应用于其他传感器结构,例如具有按相同方向取向的两个垂直霍尔元件的传感器结构,或具有磁阻元件的传感器结构等。
[0172]
应注意,当磁传感器未利用电流源进行偏置,而是例如使用“电压源”(具有相对较低的输出阻抗,例如小于10欧姆,或小于1欧姆)进行偏置时,也会发生该问题。
[0173]
在下列内容中,为了便于解释,本发明将参考作为偏置源的电流源进行解释,但本发明不限于此。同样,即使附图中被示出具有作为数字处理电路的dsp,但本发明并不限于此,并且还可以使用其他数字处理电路,例如可编程数字逻辑、微控制器等。
[0174]
图3(a)示出了与图1(a)的传感器布置类似的、具有温度传感器(更具体地,具有单
个温度传感器)的传感器布置300。
[0175]
该图的主要目的是用于说明两个磁传感器(在本示例中由单个水平霍尔元件h1、h2表示)沿x轴间隔预定义距离dx,但偏置电路和读出电路未在该图中示出。如上文所解释,该传感器结构可以用于测量x1处的bz1,x2处的bz2,并且用于基于bz1和bz2来计算梯度dbz/dx。如上文所解释,在实践中,第一磁传感器的灵敏度并不总是与第二磁传感器的灵敏度完全相同,即使使用完全相同的布局符号,并且即使当它们利用(例如由电流镜生成的)完全相同的电流进行偏置时。
[0176]
图3(b)示出了磁传感器设备320,包括:
[0177]
半导体衬底(如图3(a)所示);
[0178]
第一磁传感器h1,该第一磁传感器h1位于所述半导体衬底上的第一传感器位置x1(参见图3(a))处,并且被布置成用于提供指示按与衬底垂直的第一方向z取向的第一磁场分量bz1的第一传感器信号(例如电压信号)v1;
[0179]
第二磁传感器h2,该第二磁传感器h2位于所述半导体衬底上的、与第一传感器位置x1间隔开的第二位置x2(参见图3(a))处,并且被布置成用于提供指示按所述第一方向z取向的第二磁场分量bz2的第二传感器信号(例如电压信号)v2corr。应注意,该信号被标记为“v2corr”,因为电流i2被调整;
[0180]
温度传感器,该温度传感器位于所述半导体衬底上的第三位置,并且被配置成用于测量衬底的温度(t)并且用于提供温度信号。第三位置可以靠近第一传感器位置、或者靠近第二传感器位置、或者基本上在第一传感器位置与第二传感器位置之间的中间、或者可以是衬底上的任何其他位置。
[0181]
第一电流源,该第一电流源被布置用于利用第一预定义电流i1对第一磁传感器h1进行偏置。该第一电流优选地为由本领域公知的温度补偿电流发生器电路生成的预定义电流;
[0182]
第二电流源,该第二电流源被布置成用于使用第二电流信号i2对第二磁传感器h2进行偏置。第二电流源是具有控制端口或控制门的可调电流源,将该可调电流源作为所测得的温度的函数f(t)来由处理单元(例如dsp)进行控制;
[0183]
第一放大器,该第一放大器被布置成用于以第一预定义增益a放大第一磁传感器信号v1,并用于提供第一经放大的传感器信号a_v1。
[0184]
第二放大器,该第二放大器被布置成用于以第二预定义增益a放大第二磁传感器信号v2corr,并用于提供第二经放大的传感器信号a_v2corr。第二放大器增益可以等于第一放大器增益,但是这不是绝对必要的。
[0185]
至少一个模数转换器adc,用于例如以时间复用的方式转换第一放大信号a_v1和第二放大信号a_v2corr。这由具有多个输入的adc示意性地表示,但在adc前面使用模拟多路复用器也是可能的。出于说明性的目的,此类细节在附图中被省略。
[0186]
数字处理电路,该数字处理电路连接在模数转换器adc下游,其中,磁传感器设备被配置成用于在确定第一数字值a_v1与第二数字值a_v2corr之间的差值之前,基于所测得的温度的预定义函数f(t)来调整第二偏置信号i2。
[0187]
或者换言之,梯度的测量例如可以按以下步骤执行:
[0188]
a)首先测量温度信号t,并将其数字化为值t,
[0189]
b)数字处理电路(例如数字控制器或dsp)接收数字值t,并使用值t的预定义函数调整第二电流i2,
[0190]
c)然后对第一磁传感器信号v1、第二磁传感器信号v2corr进行测量、放大和数字化,
[0191]
d)然后数字处理电路(例如数字控制器或dsp)通过将第一数字值a_v1和第二数字值a_v2corr相减来计算梯度。
[0192]
预定义函数f(t)可以被选择成使得在操作期间,第一磁传感器h1的磁灵敏度s1与从第一磁传感器h1的输出到所述确定差值(例如,在数字处理电路中执行的减法)的第一信号路径的第一总增益og1的乘积基本上等于第二磁传感器h2的磁灵敏度s2与从第二磁传感器h2的输出到所述确定差值(该差值可以在模拟域或数字域中确定)的第二信号路径的第二总增益og2的乘积。因此,f(t)被选择成使得s1*og1=s2*og2。
[0193]
读者将理解,在第二电流i2被调整之前,第一磁传感器信号v1也可以被测量、被放大和被数字化,因为第一传感器值v1不受第二电流i2的影响,但为了使本实施例工作,在第二磁传感器信号v2corr被放大、被数字化并被发送至dsp之前调整第二电流i2是必要的。
[0194]
或简单地说,对于图3(b)所示的特定电路,并假设处理电路通过简单地将数字值a_v1与a_v2corr相减来计算梯度,而不需要数字域中的进一步的乘法,并假设两个放大器的增益等于a,当按照“与电流有关的磁灵敏度”来表达温度t的各种值时,函数f(t)被优选地选择成使得(s1.i1).a=(s2.i2).a,或者在一般情况下,当按照“磁灵敏度”来表达温度t的各种值时,函数f(t)被优选地选择成使得s1.a1.d1=s2.a2.d2,其中a1、a2是模拟域中的第一信号路径、第二信号路径的放大,并且d1、d2是数字域中的第一信号路径、第二信号路径的放大。
[0195]
作为示例,假设通过施加mos晶体管的栅极电压来控制第二电流源i2,并且数字处理电路包含具有dac(数模转换器)的dsp(数字信号处理器),并且由dac生成栅极电压,然后例如可以通过在各种温度下执行校准测试来求解函数f(t)。对于每个温度而言,施加恒定的磁场,重复测量值a_v1和a_v2,并且找到值a_v2基本上等于值a_v1的栅极电压(在给定的公差裕度内,例如小于1%,或者由dac的最低有效位lsb定义的栅极电压),并且将每个温度的相应栅极电压值添加到列表中,该列表被存储在dsp内部的非易失性存储器中或被连接至dsp。在正常的操作期间,dsp可以简单地测量温度,并将温度用作索引来找到要施加到第二电流源的对应的栅极电压。该示例说明使用(例如以列表或表格形式的)校正函数来校正操作期间的灵敏度失配可以是非常简单的,而且不需要两个温度传感器或求解一组数学方程式。
[0196]
dac可以是控制电路的一部分,该控制电路被配置成用于在预定义的范围内(例如在预定义的工作点周围)调整电流源和/或放大器增益。优选地,dac具有足以允许以小于预定义工作点的1%(优选小于0.5%、或小于0.4%、或小于0.3%、或小于0.2%)的步长调整电流和/或放大器增益的分辨率。在实践中,dac可以具有至少2位、或至少4位、或至少6位的分辨率。
[0197]
综上所述,图3(b)示出用于在将第二偏置信号i2作为温度的函数进行调整之后通过在数字域中将两个值相减来测量磁场梯度的磁传感器设备320。
[0198]
该电路的许多变体是可能的,例如:
[0199]
在一变体中,磁传感器不是水平霍尔元件,而是按照相同方向取向的垂直霍尔元件。
[0200]
在一变体中,不是只存在一个adc,而是存在多个adc。
[0201]
在一变体中,第二电流源的控制信号不是由dac生成的,而是由pwm块随后是低通滤波器生成的。
[0202]
在一变体中,偏置源不是可调电流源,而是可调电压源。
[0203]
在一变体中,数字处理电路不包含数字信号处理器(dsp),而包含微控制器。
[0204]
在一变体中,温度传感器不提供由adc数字化的模拟信号“t”,而是直接向处理电路提供数字信号“t”。
[0205]
在上文的示例中,校正函数f(t)可以被存储为(t,v)值的列表,其中t是温度,并且v是由dac生成并应用于mos晶体管的电压。但是当然,该列表也可以通过一个或多个线段的逐段线性组合来近似,或者通过数学表达式来近似,例如通过变量t的一阶或二阶或三阶多项式来近似。图3(g)中示出了一个此类示例,不仅示出了典型的校正函数f(t),而且还示出了示例性多项式的系数,该系数是通过测量多于500个样本而获得。系数可以被存储在非易失性存储器中,并且在正常使用期间,多项式表达式可以利用所测得的温度值进行求值。
[0206]
图3(c)示出根据本发明的另一实施例的图3(b)的电路的变体,该电路的变体使用单个温度传感器和可调电流源以及模拟减法。图3(c)的电路与图3(b)的电路之间的主要区别在于,第一磁传感器信号v1减去第二磁传感器信号v2corr不是在数字域(例如在dsp的软件中)执行的,而是在模拟域(在框331中)执行的。
[0207]
在图3(c)的电路中,减法电路331被配置成用于确定第一放大信号a_v1和第二放大信号a_v2corr之间的差值δv。
[0208]
adc被配置成用于例如以时间复用的方式将温度t以及差信号δv数字化。
[0209]
与上文类似,dsp被配置成用于获得数字温度值t,并且用于使用预定义的校正函数f(t)调整第二电流源i2。与上文不同的是,dsp接收指示梯度的经数字化的差信号δv。该值可以任选地乘以预定义常数。
[0210]
或者换言之,使用图3(c)的电路对梯度的测量例如可以按以下步骤执行:
[0211]
a)首先测量温度信号t,并将其数字化以得到值t,
[0212]
b)dsp接收数字温度值t,并使用值t的预定义函数调整第二电流i2,
[0213]
c)然后将第一磁传感器信号v1和第二磁传感器信号v2corr进行测量和放大,并且在框331中生成差信号δv,并且差信号δv在adc中被数字化。
[0214]
d)dsp获得该经数字化的差信号δv,并将其视为梯度。
[0215]
为了使该实施例工作,在生成差信号δv之前(在框331中)调整第二电流i2,并使其数字化后并发送给dsp是必要的。
[0216]
上文所述的优点中的许多优点在此也适用。
[0217]
图3(c)的电路330提供了附加的优点,通过在由adc进行数字化之前在模拟域中执行减法。通过这样做,梯度的信噪比(snr)可以被大大地改善,因为现在可以使用adc的全部范围来对差信号进行数字化,而与其中需要adc的全部范围来量化各个磁场分量的图3(b)不同。
[0218]
减法电路331之后可任选地跟随具有放大因子的第三放大器b(用虚线指示),但这
不是绝对必需的。
[0219]
对于这种情况,校正函数f(t)例如可以按照以下操作获得:再假设通过施加mos晶体管的栅极电压来控制第二电流源i2,并且dsp包含dac,并且通过将dac信号施加到mos晶体管的栅极来执行对第二电流源i2的调整,则例如可以通过在各种温度下执行校准测试来求解函数f(t)。对于每个温度而言,施加恒定的磁场、改变dac电压、以及测量所得到的值δv,并且差值δv最小(以绝对值的形式)的dac电压被视为要被施加以通过使得总增益(来自[以mt表达的]磁场强度)与dsp中的数字值之比对于两个信号路径而言基本上相同的方式调整第二电流源的栅极电压。同样,各种温度的dac电压可以被存储在非易失性存储器的列表中,或者可以用于曲线拟合,在该情况下,曲线的参数(例如二阶多项式)被存储在所述非易失性存储器中。
[0220]
综上所述,图3(c)示出用于通过将两个值相减来测量磁场梯度的磁传感器设备,其中在模拟域中执行减法,并且其中第二电流作为温度的函数进行调整。
[0221]
针对图3(b)所描述的所有变体也可以应用于图3(c)。例如,磁传感器元件可以是垂直霍尔元件;可以存在多个adc而不是仅有一个adc;控制信号可以由pwm
‑
生成器
‑
块和低通滤波器生成而不是由dac生成;偏置源可以是偏置电压;数字处理电路可以包括微控制器;温度传感器可以提供数字温度信号,梯度可以进一步被缩放,或上述各项的组合。
[0222]
图3(d)示出根据本发明的另一实施例的图3(b)的电路的变体,该电路的变体使用单个温度传感器和可调放大器增益以及数字减法。图3(d)的电路与图3(b)的电路之间的主要区别在于,第二电流源是预定义的电流源,(例如温度补偿电流源,或第一电流源的电流镜),并且第二放大器具有可调的增益a2。第二电流可以例如使用电流镜与第一电流基本上相同,但是这不是绝对必要的,例如也可以使用温度补偿的预定义第二电流源。
[0223]
dsp被配置成用于获得数字温度值t,并且用于使用预定义的校正函数f(t)调整第二放大器增益。对于该情况而言,校正函数f(t)可以以与图3(b)中所描述的方式类似的方式获得,区别在于,在图3(d)中,dac电压被施加到第二放大器的端口或节点。
[0224]
为了使该实施例工作,在传感器信号v2corr被数字化并被发送至dsp以供进一步处理之前调整第二增益a2是有必要的。
[0225]
综上所述,图3(d)示出用于在将第二放大器的增益作为温度的函数进行调整之后通过在数字域中将两个值a_v1和a_v2相减来测量磁场梯度的磁传感器设备340。
[0226]
针对图3(b)所描述的所有变体也可以应用于图3(d)。
[0227]
图3(e)示出根据本发明的另一实施例的图3(c)的电路的变体,该电路的变体使用单个温度传感器和可调放大器增益以及模拟减法。图3(e)的电路与图3(c)的电路的主要区别在于,第二电流源是预定义的电流源,并且第二放大器具有可调的增益a2。第二电流i2可以与第一电流i1基本上相同,但是这不是绝对必要的。
[0228]
dsp被配置成用于获得数字温度值t,并且用于使用预定义的校正函数f(t)调整第二放大器增益。对于该情况而言,校正函数f(t)可以以与图3(c)中所描述的方式类似的方式获得,区别在于,在图3(e)中,dac电压被施加到第二放大器的端口或节点,而不是被施加到第二电流源的端口或节点。
[0229]
为了使该实施例工作,在框351中生成经放大的传感器信号a_v1与a_v2corr之间的差值δv并且然后由adc进行数字化,并且然后被发送至dsp以供进一步处理之前调整第
二增益a2是有必要的。
[0230]
综上所述,图3(e)示出用于在将第二放大器的增益作为温度的函数进行调整之后通过模拟域中的两个经放大的传感器信号a_v1、a_v2corr来测量磁场梯度的磁传感器设备350。
[0231]
针对图3(b)所描述的所有变体也可以应用于图3(e)。
[0232]
图3(f)示出根据本发明的另一实施例的图3(b)的电路的变体,该电路的变体使用单个温度传感器,但没有可调的电流源,并且没有可调的放大器增益。图3(f)的电路与图3(b)的电路的主要区别在于,第二电流源是预定义的电流源,并且第二放大器具有预定义的增益。第二电流i2可以与第一电流i1基本上相同,但是这不是绝对必要的。第二放大器增益可以基本上等于第一放大器增益,但是这不是绝对必要的。
[0233]
dsp被配置成用于从温度传感器获得数字温度值t,并用于将数字校正因子fcorr确定为温度的函数f(t)。
[0234]
对于该情况而言,校正函数f(t)例如可以通过在各种温度下执行校准测试来获得。对于每个温度而言,施加恒定的磁场,测量a_v1和a_v2的值,并选择校正因子fcorr的值,使得所得到的梯度值基本上等于零。这可以通过简单的计算获得:
[0235]
fcorr*a_v2
‑
a_v1必须是=0,因此fcorr需要是=a_v1/a_v2。
[0236]
在设备的实际使用期间,测量温度,从非易失性存储器中计算出或检取出对应的校正因子fcorr,从adc中获得值a_v1和a_v2,首先将a_v2的值与校正因子fcorr相乘以获得经校正的第二数字值a_v2corr,并且然后在数字域中计算a_v1与a_v2corr的差值以获得梯度。
[0237]
综上所述,图3(f)示出用于在将第二数字值a_v2与作为温度的函数的校正因子fcorr相乘之后、通过在数字域中将两个值a_v2corr、a_v1相减来测量磁场梯度的磁传感器设备360。
[0238]
针对图3(b)所描述的所有变体也可以应用于图3(f)。
[0239]
图3(g)示出了可在图3(b)的实施例中使用的、被封装在特定封装中的特定磁传感器设备的说明性校正函数f(t)。发现被嵌入在两个不同封装中的特定半导体管芯可能会得到不同的校正函数,但其原理仍然保持不变。
[0240]
回顾图3(a)至图3(g)中提出的解决方案,其中测量温度,并且执行对一个偏置源或一个信号路径中的一个组件或步骤的调整(例如通过可调电流源或可调放大器执行调整或在数字域中执行调整),本领域技术人员将理解,调整第二信号路径中的多个组件或步骤,或者甚至调整两个信号路径当然也是可能的,但此类实施例是更加复杂的,而且不是优选的。
[0241]
图4(a)和图4(b)示出了图3(a)和图3(b)的传感器布置的变体,其中增加了差分应力测量电路传感器,包括:第一应力传感器s1,该第一应力传感器s1位于第一磁传感器h1附近并被配置成用于提供第一应力信号σ1;以及第二应力传感器s2,该第二应力传感器s2位于第二磁传感器h2附近并被配置成用于提供第二应力信号σ2;以及减法电路421,用于确定第一应力信号σ1与第二应力信号σ2之间的差值以获得所述差分应力信号δσ。
[0242]
从图4(b)中可以看出,至少一个模数转换器adc进一步被配置成用于将差分应力信号δσ任选地在由第三放大器b进行放大之后数字化为“差分应力值”δ∑(在本文中也被
称为“应力差值”),并且用于将该差分应力值δ∑提供给数字处理电路dsp。
[0243]
梯度的测量例如可以按以下步骤来执行:
[0244]
a)首先对温度信号t和差分应力信号δσ进行测量、任选地放大、和数字化。
[0245]
b)dsp接收数字温度值t和δ∑,并使用这些值t和
△
∑的预定义函数调整第二电流i2,
[0246]
c)然后对第一磁传感器信号v1、第二磁传感器信号v2corr进行测量、放大和数字化,
[0247]
d)然后dsp通过将第一数字值a_v1与第二数字值a_v2corr相减来计算梯度。
[0248]
为了使该实施例正确地工作,在第二磁传感器信号v2corr被放大和被数字化并被发送至dsp以供进一步处理之前调整第二电流i2是有必要的。
[0249]
针对图3(b)所描述的所有变体也可以应用于图4(b)。
[0250]
图4(c)至图4(f)示出图3(c)至图3(f)的电路的变体,该电路的变体进一步包括图4(a)和图4(b)中所描述的差分应力传感器电路。操作的原理与上文所述的原理类似,区别在于,在图4(b)至图4(f)的实施例中,预定义函数不仅是温度的函数,而且是温度t和差分应力δ∑的函数。
[0251]
简而言之,在图4(c)中,温度t和差分应力δσ被测量并被数字化为t、δ∑并被发送至dsp,dsp使用所述温度和差分应力的预定义函数f(t,δ∑)调整第二电流源i2,第一磁传感器信号v1和第二磁传感器信号v2corr被放大(得到a_v1、a_v2corr)并在模拟域中相减,并且差分信号δv被数字化为δv并作为梯度被发送至dsp。
[0252]
简而言之,在图4(d)中,温度t和差分应力δσ被测量并被数字化为t、δ∑并被发送至dsp,dsp使用所述温度和差分应力的预定义函数f(t,δ∑)调整第二放大器增益a2,第一磁传感器信号v1和第二磁传感器信号v2被放大为a_v1、a_v2corr并被数字化为a_v1、a_v2corr,并且被发送至dsp,dsp将这些数字值相减以获得梯度。
[0253]
简而言之,在图4(e)中,温度t和差分应力δσ被测量并被数字化为t、δ∑并被发送至dsp,dsp使用所述温度和差分应力的预定义函数f(t,δ∑)调整第二放大器增益a2,第一磁传感器信号v1和第二磁传感器信号v2被放大(得到a_v1、a_v2corr)并在模拟域中相减(得到δv),差信号δv被数字化(得到δv)并作为梯度被发送至dsp。
[0254]
简而言之,在图4(f)中,温度t和差分应力δσ被测量并被数字化为t、δ∑,并且被发送至dsp,dsp使用所述温度和差分应力的预定义函数f(t,δ∑)来确定校正因子fcorr,第一磁传感器信号v1和第二磁传感器信号v2被放大(得到a_v1、a_v2)并且被数字化(得到a_v1、a_v2)并被发送至dsp,dsp将第二数字信号a_v2与校正因子fcorr相乘以获得a_v2corr,并且然后在数字域中将第一数字值a_v1和经校正的第二数字值a_v2corr相减以获得梯度。
[0255]
针对图3(c)至图3(f)所描述的所有变体也适用于图4(c)至图4(f),这些变体例如使用垂直霍尔元件代替水平霍尔元件、使用多个adc、使用具有dac或pwm和lpf的dsp、利用电压源代替电流源进行偏置、使用微控制器代替dsp、使用具有数字输出的温度传感器等。
[0256]
图5(a)和图5(b)示出图4(a)和图4(b)的传感器布置和电路的变体,该电路的变体具有差分应力测量电路,但没有温度传感器,其意义在于dsp没有明确地使用温度值来调整可调电流源或可调放大器或在其计算梯度时使用温度。该电路520的工作与图4(b)类似,区
别在于,温度未被测量和被数字化。差分应力δσ被测量并被数字化,并且使用差分应力δ∑的函数f(δ∑)而不是温度的函数来调整第二电流源i2。
[0257]
图5(c)至图5(f)示出图4(b)至图4(f)的电路的变体,该电路的变体没有温度传感器。这些电路也可以被认为是图3(b)至图3(f)的变体,该变体利用差分应力传感器代替温度传感器。操作的原理与上文所描述的原理类似,区别在于,预定义的函数是差分应力的函数,而不是温度的函数。
[0258]
简而言之,在图5(c)中,差分应力δσ被测量,任选地被放大,并且被数字化(得到δ∑)并被发送至dsp,dsp使用所测得的差分应力的预定义函数f(δ∑)来调整第二电流源i2,然后第一磁传感器信号v1和第二磁传感器信号v2corr被放大(得到a_v1、a_v2corr)并在模拟域中相减(得到δv),并且差信号δv被数字化(得到δv)并作为梯度被发送至dsp。
[0259]
简而言之,在图5(d)中,差分应力δσ被测量并被数字化为δ∑,并且被发送至dsp,dsp使用所测得的差分应力的预定义函数f(δ∑)来调整第二放大器增益a2,第一磁传感器信号v1和第二磁传感器信号v2被放大(得到a_v1、a_v2corr)并被数字化(得到a_v1、a_v2corr),并且被发送至dsp,dsp将第一数字值a_v1与第二数字值a_v2corr相减以获得梯度。
[0260]
简而言之,在图5(e)中,差分应力δσ被测量,任选地被放大,并且被数字化(得到δ∑)并被发送至dsp,dsp使用所测得的差分应力的预定义函数f(δ∑)来调整第二放大器增益a2,第一磁传感器信号v1和第二磁传感器信号v2被放大(得到a_v1、a_v2corr)并在模拟域中相减(得到δv),差信号δv被数字化(得到δv)并作为梯度被发送至dsp。
[0261]
简而言之,在图5(f)中,差分应力δσ被测量,任选地被放大,并被数字化(得到δ∑),并且被发送至dsp,dsp使用所测得的差分应力的预定义函数f(δ∑)来确定校正因子fcorr,第一磁传感器信号v1和第二磁传感器信号v2被放大(得到a_v1、a_v2)并被数字化(得到a_v1、a_v2)并且被发送至dsp,dsp将第二数字信号a_v2与校正因子fcorr相乘以获得a_v2corr,并且然后在数字域中将第一数字值a_v1与经校正的第二数字值a_v2corr相减以获得梯度。
[0262]
针对图3(b)至图3(f)所描述的、除了使用具有数字输出的温度传感器之外的所有变体也适用于图5(b)至图5(f),例如使用垂直霍尔元件代替水平霍尔元件、使用多个adc、使用具有dac或pwm和低通滤波器的dsp、利用电压源代替电流源进行偏置、使用微控制器代替dsp、进一步缩放梯度等。
[0263]
回顾图3(a)至图5(f),可以看出,图3的实施例具有温度传感器,但没有差分应力传感器,图5的实施例具有差分应力传感器,但没有温度传感器,并且图4的实施例既有差分应力传感器,又有温度传感器。
[0264]
图5的实施例背后的原理在于,明确地测量温度可能不是必要的,因为温度变化通常也会引起由于材料的热膨胀或收缩而造成的应力变化,因此在对差分应力进行补偿时,温度变化也将(至少部分地)被补偿。
[0265]
同样,图3的实施例背后的原理在于,在对温度进行补偿时将自动地对由温度变化引起的应力变化的补偿。
[0266]
图4(a)至图4(f)中的、既具有温度传感器又具有差分应力测量电路的实施例能够对不是由温度变化引起的、而是由其他原因引起的(例如由设备被安装在其上的印刷电路
板(pcb)的机械弯曲引起的)机械应力进行补偿。因此,图4(a)至图4(f)的实施例可能对长期漂移是更加稳健的。
[0267]
到目前为止,仅描述了磁传感器结构,其中每个磁传感器由单个水平霍尔板或单个垂直霍尔板组成。但本发明并不限于此,并且对其他磁传感器(例如对包含磁阻元件的磁传感器(未示出))同样起作用。
[0268]
在图6(a)至图8(c)中还将针对包括所谓的“双盘结构”的传感器设备来描述本发明的原理,其中,每个磁传感器由被布置在集成磁聚集器(imc)的相对侧上的两个水平霍尔板组成。
[0269]
imc盘通常具有约为200
‑
250微米的直径,并且通常间隔开约1.0mm至约3.0mm(例如等于约2.0mm)的距离,但是当然,本发明并不限于此,并且也可以使用其他尺寸。可以通过假设属于一个磁传感器的所有元件具有相同的温度并经历相同的机械应力,将上文所描述的原理容易地应用于此类传感器设备。
[0270]
图6(a)示出了具有两个磁传感器的传感器布置600,每个磁传感器包括被布置在集成磁聚集器imc的相对侧上的两个水平霍尔元件。
[0271]
由imc1、h1a和h1b组成的第一磁传感器位于第一传感器位置xl处。由imc2、h2a和h2b组成的第二磁传感器位于第二传感器位置xr处。第一传感器位置和第二传感器位置沿x轴间隔开距离dx。这四个水平霍尔元件均位于x轴上。
[0272]
在其他专利申请中对该传感器结构进行了描述,例如在us2018372475a1和ep19193068.4中,这两份专利申请均通过引用以其整体结合于此,但出于本发明的目的,知道以下各项就足够了:
[0273]
处于第一传感器位置xl处并且按与衬底平行的x方向取向的磁场分量bxl可以被计算为:bxl=(v1b
‑
v1a)(或与(v1b
‑
v1a)成比例),其中v1b是由h1b提供的信号,并且v1a是由h1a提供的信号。
[0274]
处于第一传感器位置xl处并且按与衬底垂直的z方向取向的磁场分量bzl可以被计算为:bzl=(v1b+v1a)(或与(v1b+v1a)成比例),
[0275]
处于第一传感器位置xr处并且按与衬底平行的x方向取向的磁场分量bxr,该磁场分量bxr可以被计算为:bxr=(v2b
‑
v2a)(或与(v2b
‑
v2a)成比例),其中v2b是由h2b提供的信号,并且v2a是由h2a提供的信号。
[0276]
处于第二传感器位置xr处并且按与衬底垂直的z方向取向的磁场分量bzr可以被计算为:bzr=(v2b+v2a)(或与(v2b+v2a)成比例),
[0277]
沿x轴被取向成与衬底平行的磁场分量bx的梯度dbx/dx可以被计算为:dbx/dx~δbx=bxr
‑
bxl,其中符号~表示“与
……
成正比”,
[0278]
以及沿x轴被取向成与衬底垂直的磁场分量bz的梯度dbz/dx可以被计算为:dbz/dx~
△
bz=bzr
‑
bzl。
[0279]
根据本发明,受益于本公开的本领域技术人员将理解,以该方式计算出的梯度信号dbx/dx和dbz/dx在两个传感器结构之间的灵敏度失配的情况下,可能会遭受如上述公式[8]或[8b]所述的杂散场误差信号。
[0280]
图6(b)图示出如何将相对于图3(b)所描述的原理应用于图6(b)的传感器结构,以减少或基本消除杂散场误差信号。
[0281]
应注意,图6(a)的传感器结构包含用于测量衬底的温度的单个温度传感器。如上文所述,温度传感器可以位于衬底上的任何位置,例如位于距第一磁传感器和第二磁传感器的距离相等的位置。
[0282]
应进一步地注意,利用围绕两个霍尔元件h1a和h1b的虚线指示第一磁传感器,两个霍尔元件h1a和h1b的输出被组合,例如在框611中进行相减,以形成指示磁场分量bxl的第一磁传感器信号v1。
[0283]
同样,利用围绕两个霍尔元件h2a和h2b的虚线指示第二磁传感器,两个霍尔元件h2a和h2b的输出被组合,例如在框612中进行相减,以形成指示磁场分量bxr的第二磁传感器信号v2。
[0284]
出于完整性,应提及的是,两个霍尔板h1a和h1b的灵敏度通常以已知的方式(例如使用i1和i1的电流镜,和/或微调)相互(静态地)匹配,并且两个霍尔板h2a和h2b的灵敏度也通常以已知的方式相互(静态地)匹配。但是除了现有技术之外,根据本发明的原理,根据温度的函数和/或根据差分应力的函数,第一传感器作为整体的灵敏度还与第二传感器作为整体的灵敏度进行动态匹配。
[0285]
通过将图6(b)和图3(b)进行比较,本领域读者将理解,例如,可以使用图6(a)的拓扑和图6(b)的电路按以下步骤来确定梯度dbx/dx:
[0286]
a)首先测量温度信号t,并将其进行数字化(为值t),
[0287]
b)dsp接收到数字值t,并使用值t的预定义函数调整第二传感器的偏置电流(这里指:偏置电流i3和偏置电流i4),
[0288]
c)然后对第一磁传感器信号v1和第二磁传感器信号v2进行测量、放大和数字化,
[0289]
d)然后dsp通过将第一数字值a_v1与第二数字值a_v2corr相减来计算梯度。
[0290]
针对图3(b)至图3(f)所描述的变体(除使用垂直霍尔元件之外)也适用于图6(b),这些变体例如使用多个adc、具有dac或pwm和低通滤波器的dsp,利用电压源代替电流源进行偏置,使用微控制器代替dsp、进一步缩放梯度等。
[0291]
在图6(b)的又一变体中,由h1a和h1b生成的信号v1a和v1b在框611中相加(而不是相减),在该情况下,信号v1指示bzl(而不是bxl),并且由h2a和h2b生成的信号v2a和v2b在框612中相加(而不是相减),在该情况下,信号v2指示bzr(而不是bxl),并且被测量的梯度是dbz/dx(而不是dbx/dx)。
[0292]
图6(c)示出可以被看作是图6(b)的电路610的变体的电路620,该电路使用的原理与图3(d)中解释的原理相同。可以使用图6(a)的拓扑和图6(c)的电路例如按以下步骤来计算梯度:
[0293]
a)首先测量温度信号t,并将其进行数字化,
[0294]
b)dsp接收数字值t,并使用值t的预定义函数调整第二放大器的增益a2,
[0295]
c)然后对第一磁传感器信号v1和第二磁传感器信号v2进行测量、放大和数字化,
[0296]
d)然后dsp通过将第一数字值a_v1与第二数字值a_v2corr相减来计算梯度。
[0297]
对于图6(b)所描述的变体也适用于图6(c)。
[0298]
在图6(b)或图6(c)的又一个或进一步的变体中,经放大的信号a_v1和a_v2corr在模拟域中相减,并且差信号δv被放大并被数字化,并且由dsp以与图3(c)或图3(e)中所描述的方式类似的方式进一步处理。如上文所提及,该实施例提供了更高的信噪比(snr),因
为adc的范围可用于对梯度信号而不是分量信号进行数字化。
[0299]
在图6(b)和图6(c)(未示出)的又一个或进一步的变体中,第二传感器的偏置源(因此:i3和i4)不受dsp控制,而是使用例如预定义电流i3(通常由温度补偿电流源生成)和(例如,利用电流镜从i3中再现的)预定义电流i4,并将信号v1、v2进行放大和数字化,并将值a_v1和值a_v2提供给dsp,并且dsp首先在数字域中通过使用温度的预定义函数的校正因子fcorr来校正第二数字值a_v2,然后以与图3(f)中描述的方式类似的方式将第一数字值a_v1和经校正的第二数字值a_v2corr相减。
[0300]
图7(a)示出图6(a)的传感器布置的变体,该传感器布置的变体进一步包括用于测量第一传感器(包括:imc1、h1a、h1b)的机械应力的第一机械应力传感器s1和用于测量第二传感器(包括:imc2、h2a、h2b)的机械应力的第二机械应力传感器s2。应力传感器s1可以被定位成与imc1相邻,或被定位成在imc1的下方。同样,应力传感器s2可以被定位成与imc2相邻,或被定位成在imc2的下方。
[0301]
图7(b)示出与图6(b)的电路类似的电路710,其中增加了差分应力传感器电路,该电路被配置成用于提供差分应力信号δσ,该差分应力信号δσ由adc进行数字化,并由dsp以与图4(b)所描述的方式类似的方式进一步进行处理,考虑到在该情况下“调整第二偏置源”意味着使用温度和差分应力的预定义函数f(t,δ∑)调整电流源i3和i4。
[0302]
图7(c)示出与图6(c)的电路类似的电路720,其中增加了差分应力传感器电路,该电路被配置成用于提供差分应力信号δσ,该差分应力信号δσ由adc进行数字化,并由dsp以与图4(d)所描述的方式类似的方式进一步进行处理,其中,使用温度t和差分应力δ∑的预定义函数f(t,δ∑)调整第二放大器增益。
[0303]
针对图6(b)和图6(c)描述的变体也适用于图7(b)和图7(c),
[0304]
例如,在与图4(c)的实施例类似的实施例中,磁传感器信号v1和v2在模拟域中相减,并且使用温度和差分应力的预定义函数f(t,
△
∑)调整第二磁传感器的偏置源(因此i3和i4),以及
[0305]
例如,在与图4(e)的实施例类似的实施例中,磁传感器信号v1和v2在模拟域中相减,并使用温度和差分应力的预定义函数f(t,
△
∑)调整第二放大器增益,以及
[0306]
例如,在与图4(f)的实施例类似的实施例中,第二磁传感器的偏置源包含预定义(不可调)的电流源i3和i4,并且其中磁传感器信号v1、v2被放大并被数字化,并且值a_v1和值a_v2被提供给dsp,并且dsp首先在数字域中通过使用温度和差分应力的预定义函数f(t,
△
∑)的校正因子fcorr来校正第二数字值a_v2,然后以与图4(f)中所描述的方式类似的方式将第一数字值a_v1与经校正的第二数字值a_v2corr相减。
[0307]
图8(a)示出图7(a)的传感器布置的变体,该传感器布置的变体没有温度传感器,而图8(b)和图8(c)示出图7(b)和图7(c)的电路的变体,该电路的变体没有温度传感器。
[0308]
针对图7(b)和图7(c)描述的变体也适用于图8(b)和图8(c),
[0309]
例如,在与图4(c)的实施例类似的实施例中,磁传感器信号v1和v2在模拟域中相减,并且使用所测得的差分应力的预定义函数f(
△
∑)调整第二磁传感器的偏置源(因此i3和i4),以及
[0310]
例如,在与图4(e)的实施例类似的实施例中,磁传感器信号v1和v2在模拟域中相减,并使用所测得的差分应力的预定义函数f(
△
∑)调整第二放大器增益,以及
[0311]
例如,在与图4(f)的实施例类似的实施例中,第二磁传感器的偏置源包含预定义(不可调)的电流源i3和i4,并且其中磁传感器信号v1、v2被放大并被数字化,并且值a_v1和值a_v2被提供给dsp,并且dsp首先在数字域中通过使用所测得的差分应力的预定义函数f(
△
∑)的校正因子fcorr来校正第二数字值a_v2,然后以与图4(f)中所描述的方式类似的方式将第一数字值a_v1与经校正的第二数字值a_v2corr相减。
[0312]
在图3至图8中,已经描述了用于通过动态地调整一个信号路径相对于另一个信号路径的灵敏度或增益,以减少杂散场信号的影响的方式确定磁场的梯度的若干种传感器结构和方法。在下文中,将描述可以在其中使用(单个)梯度测量的示例性系统。
[0313]
在图9和图10中,将描述两个磁电流传感器。
[0314]
在图11中,描述了距离测量系统。后者例如可用于检测在两个预定义位置之间可移动的按钮被按下或未被按下。
[0315]
在图12(a)至图12(d)中将描述用于确定单个磁场梯度的方法。
[0316]
图9(a)和图9(b)图示出基于根据本发明原理来测量磁场梯度的磁电流传感器900。
[0317]
图9(a)和图9(b)分别以俯视图和截面图示出了根据本发明的实施例的电流传感器设备900的示例性框图。电流传感器设备900包括具有两个彼此间隔开的水平霍尔元件901和902的半导体衬底910。衬底910相对于电导体913(例如汇流条)被布置在预定义的位置。当要测量的电流流过导体913时,由该电流产生磁场,并由第一传感器901和第二传感器902根据本发明的原理(例如如图3(a)至图5(f)中的任一者所解释的那样)测量该磁场的梯度。
[0318]
为此,衬底910包括温度传感器和/或差动应力传感器、两个放大器、至少一个adc和被配置成用于执行上文所述的方法中的任何一种方法的处理电路。
[0319]
在实施例中,第一霍尔元件901以第一预定义电流i1来进行偏置,并且第二霍尔元件902以可调电流i2来进行偏置,并且处理电路被配置成用于例如以与图3(b)或图3(d)或图4(b)或图4(d)或图5(b)或图5(d)中所述的方式类似的方式,使用所测得的温度的预定义函数f(t)、或差分应力的预定义函数f(δ∑)、或温度和差分应力两者的预定义函数f(t,δ∑)来调整第二电流i2。
[0320]
在另一实施例中,第一霍尔元件901以第一预定义电流i1来进行偏置,并且第一磁传感器信号被具有第一预定义增益的第一放大器放大,并且第二霍尔元件902以第二预定义电流i2来进行偏置,并且第二磁传感器信号被具有可调增益的第二放大器放大,并且处理电路被配置成用于例如以与图3(c)或图3(e)或图4(c)或图4(e)或图5(c)或图5(e)中所述的方式类似的方式,使用所测得的温度t的预定义函数f(t)、或差分应力的预定义函数f(δ∑)、或温度和差分应力两者的预定义函数f(t,δ∑)来调整第二增益。
[0321]
在又一实施例中,第一霍尔元件901以第一预定义电流i1来进行偏置,并且该信号被具有第一预定义增益的第一放大器放大,并且第二霍尔元件902以第二预定义电流i2来进行偏置,并且该信号被具有第二预定义增益的第二放大器放大,两个信号均被数字化,并且处理电路被配置成用于例如以与图3(f)或图4(f)或图5(f)中所述的方式类似的方式,在数字域中将第二数字值a_v2与使用所测得的温度t的预定义函数f(t)、或差分应力的预定义函数f(δ∑)、或温度和差分应力两者的预定义函数f(t,δ∑)的校正因子fcorr相乘。
[0322]
在这些情况中的每一种情况下,处理电路进一步被配置成用于例如通过将梯度值与预定义常数k4相乘来将梯度值转换为电流值,例如根据以下公式:
[0323]
电流=梯度*k4[11]
[0324]
或者通过将梯度值除以预定义常数k3来将梯度值转换为电流值,例如根据以下公式:
[0325]
电流=梯度/k3[12]
[0326]
k3或k4的值可以在设计期间确定,或通过模拟、或通过校准、或以任何其他方式确定,并且可以被存储在嵌入处理电路或连接至处理电路的非易失性存储器中
[0327]
在变体中,k3或k4的值不是恒定的,而是依赖于温度。在该情况下,可以以任何合适的方式将函数k3(t)或k4(t)存储在非易失性存储器中,任何合适的方式例如作为要被插值的值的列表、或使用片断线性近似、或通过在所述nv存储器中存储多项式的系数等。
[0328]
在图9的示例中,电导体913(在与电流流动的方向垂直的平面内)具有矩形截面,但这并不是绝对必需的,并且本发明将同样适用于其他截面。
[0329]
在图9的示例中,半导体衬底910相对于电导体913布置,使得第二传感器902基本上位于电导体的中心线或心脏线的上方,但这不是必需的,并且如果衬底910移位,使得磁传感器901、902中没有一者位于电导体的心脏线的上方,本发明也将起作用。它们均可位于图9(b)中的中心线的左侧,或者一者位于中心线的左侧并且另一者位于中心线的右侧。
[0330]
在图9(b)的示例中,在与衬底910垂直的方向上通过第一传感器901的虚线与电导体913不相交,而通过第二传感器902并与衬底910垂直的虚线与电导体913相交。但这并不是绝对必需的,并且如果两个传感器元件均被定位成使得通过它们并与衬底910垂直的虚线均与电导体913相交,或者这些线中的每一条线都不与电导体913相交,那么本发明也同样起作用。
[0331]
在实施例中,电导体913位于磁传感器设备的外部。
[0332]
在另一实施例中,电导体或至少其梁形的部分例如作为引线框架的一部分被包括在设备的封装中。此类电流传感器被称为“集成式电流传感器”。
[0333]
图10(a)和图10(b)图示出电流传感器的另一示例,其中通过测量磁场梯度间接地测量电流。图10(a)为俯视图,并且图10(b)示出电流传感器设备的侧视图。所示出的是集成电流传感器,其中电导体1003被嵌入到电流传感器设备1000的封装中。
[0334]
该电流传感器设备1000包括半导体衬底1010,半导体衬底1010具有作为第一磁传感器和第二磁传感器的两个垂直霍尔元件1031和1032。电导体1003被连接至第一输入引线1006和第一输出引线1007,也称为“引脚”。衬底可以进一步包括通过键合线连接至第二引脚1002的键合焊盘1004,例如以用于接收电源电压和接地,并用于提供所测得的电流值。
[0335]
根据本发明的原理,衬底1010包括温度传感器和/或差动应力传感器、两个放大器、至少一个adc和被配置成用于执行上文所述的方法中的任何一种方法的处理电路。
[0336]
在实施例中,第一霍尔元件1031以第一预定义电流i1来进行偏置,并且第二霍尔元件1032以可调电流i2来进行偏置,并且处理电路被配置成用于例如以与图3(b)或图3(d)或图4(b)或图4(d)或图5(b)或图5(d)中所述的方式类似的方式,使用所测得的温度t的预定义函数f(t)、或差分应力的预定义函数f(δ∑)、或温度和差分应力两者的预定义函数f(t,δ∑)来调整第二电流i2。
[0337]
在另一实施例中,第一霍尔元件1031以第一预定义电流i1来进行偏置,并且第一磁传感器信号被具有第一预定义增益a1的第一放大器放大,并且第二霍尔元件1032以第二预定义电流i2来进行偏置,并且第二磁传感器信号被具有可调增益a2的第二放大器放大(或者第一磁传感器信号被具有可调增益a1的第一放大器放大,第二磁传感器信号被具有第二预定义增益a2的第二放大器放大),并且处理电路被配置成用于例如以与图3(c)或图3(e)或图4(c)或图4(e)或图5(c)或图5(e)中所述的方式类似的方式,使用所测得的温度t的预定义函数f(t)、或差分应力的预定义函数f(δ∑)、或温度和差分应力两者的预定义函数f(t,δ∑)来调整第二增益a2。
[0338]
在又一实施例中,第一霍尔元件1031以第一预定义电流i1来进行偏置,并且第一磁传感器信号被具有第一预定义增益的第一放大器放大,并且第二霍尔元件1032以第二预定义电流i2来进行偏置,并且第二磁传感器信号被具有第二预定义增益的第二放大器放大,两个传感器信号均被数字化并且被提供至数字处理电路,并且处理电路被配置成用于例如以与图3(f)或图4(f)或图5(f)中所述的方式类似的方式,在数字域中将第二数字值a_v2与使用所测得的温度t的预定义函数f(t)、或差分应力的预定义函数f(δ∑)、或温度和差分应力两者的预定义函数f(t,δ∑)校正因子fcorr相乘。
[0339]
在这些情况中的每一种情况下,处理电路进一步被配置成用于例如通过将梯度值与预定义常数k4相乘来将梯度值转换为电流值,例如根据以下公式:
[0340]
电流=梯度*k4[11]
[0341]
或者通过将梯度值除以预定义常数k3来将梯度值转换为电流值,例如根据以下公式:
[0342]
电流=梯度/k3[12]
[0343]
k3或k4的值可以在设计期间确定,或通过模拟、或通过校准、或以任何其他方式确定,并且可以被存储在嵌入处理电路或连接至处理电路的非易失性存储器中。
[0344]
许多变体是可能的,
[0345]
例如,在变体中,k3和k4取决于温度,如图9所述,
[0346]
例如,在图10的示例中,电导体1003是直的、平面的、梁形的导体部分,该导体部分从封装的一侧延伸到封装的相对侧。然而,这对于本发明工作不是必需的,并且本发明在例如具有u形或c形或v形或ω形的电导体的情况下也将起作用。同样,在图10的示例中,每个导体端部经由三个输入引脚1006和三个输出引脚1007连接,但本发明在少于三个引脚、或超过三个引脚、或其他类型的连接(例如条带)的情况下也将起作用。
[0347]
在另一实施例中(未示出),半导体衬底1010包含没有集成磁聚集器(imc)的两个水平霍尔元件。
[0348]
在另一实施例中(未示出),半导体衬底1010包含具有集成磁聚集器(imc)的两个水平霍尔元件。
[0349]
在另一个实施例中(未示出),半导体衬底1010包含包括磁阻元件的两个磁传感器。
[0350]
图11(a)示出根据本发明的另一个实施例的用于测量磁体1120相对于衬底的距离z1的传感器布置1100。这例如可以用于检测连接到磁体的按钮是被按下还是未被按下。磁体1120可以例如是沿z轴相对于半导体衬底可移动地安装的、轴向磁化的盘状或圆柱形的
磁体。
[0351]
图11(a)示出了包含第一磁传感器1101(由矩形表示)和间隔开距离d的第二磁传感器1102(也由矩形表示)的半导体衬底1130。根据本发明的原理,该衬底进一步包括温度传感器和/或差动应力传感器、两个偏置源(优选地电流源)、两个放大器、至少一个adc和包括非易失性存储器(未示出)或连接至非易失性存储器的处理单元,并且处理电路被配置成用于测量温度和/或差动应力,并用于调整电流源或放大器增益或用于使用所测得的温度t的预定义函数f(t)、或差分应力的预定义函数f(
△
∑)、或温度和差分应力两者的预定义函数f(t,
△
∑)来校正数字值,并用于计算梯度。
[0352]
图11(b)示出将由两个传感器针对在图11(a)的x轴上的各个位置、针对可移动磁体沿z轴的两个预定义的位置((与按钮被释放相对应的)上部位置和(例如与按钮被按下相对应的)下部位置)测量的磁场分量bx的绘图。假设传感器1101和1102位于x轴上的位置x1和x2处。x轴和y轴与衬底1130平行,z轴基本上与衬底1130垂直。
[0353]
当磁体1120处于第一位置/第一距离处时,第一磁传感器和第二磁传感器将测量值a和a',并且这些信号的梯度为δbx。
[0354]
当磁体1120处于第二位置/第二距离时,第一磁传感器和第二磁传感器将测量值b和b',并且这些信号的梯度为δbx。
[0355]
从图11(b)中可以领会,梯度信号的幅度(例如δbx或δbx)指示磁体相对于衬底的距离,或者换句话说,如果梯度是已知的,则距离可以被确定。在一些情况下(例如按钮),确切的位置并不重要,但区分以下两种可能的条件就足够了:按下或未按下。这可以通过将梯度值与阈值进行比较来容易地实现。
[0356]
图11(c)是图11(a)的传感器布置的实施例的示意性表示,其中每个磁传感器包括用于测量传感器位置处的、与衬底平行的磁场分量bx的两个水平霍尔元件和imc。细心的读者将认识到,这正是图6(a)至图8(c)及其变体中所描述的内容。
[0357]
图11(d)是图11(a)的传感器布置的实现方式的示意性表示,其中每个磁传感器包括用于测量传感器位置处的、与衬底平行的磁场分量bx的两个垂直霍尔元件和imc。细心的读者将认识到,这被描述为图3(a)至图5(e)的变体,其中水平霍尔元件被按单个方向(例如x方向)取向的垂直霍尔元件替代。
[0358]
在这两种情况下(图11c和图11d),为了形成距离测量系统,唯一需要添加的是处理单元需要例如使用查找表、或使用数学公式将梯度值转换为距离值;
[0359]
并且为了形成按钮检测系统,或开关位置检测系统,唯一需要添加的是,处理单元需要将梯度值与(例如硬编码的或存储在非易失性存储器中的)预定义阈值进行比较,并且如果梯度值大于阈值,则输出第一信号,以指示按钮或开关处于第一状态(例如释放),并且如果梯度值小于阈值,则输出第二信号,以指示按钮或开关处于第二状态(例如被按下)。
[0360]
图12(a)示出了图示出可在本发明实施例中用于确定梯度信号的方法的通用流程图。方法1200包括以下步骤:
[0361]
a)提供半导体衬底,该半导体衬底包括:
[0362]
沿预定义轴线间隔开的第一磁传感器和第二磁传感器;
[0363]
第一偏置源和第二偏置源(例如,第一电流源和第二电流源);
[0364]
第一放大器和第二放大器;
[0365]
温度传感器和/或差分应力感测电路;
[0366]
(例如,温度传感器,但没有差分应力感测电路;或差分应力感测电路,但没有温度传感器;或既有温度传感器又有差分应力感测电路)
[0367]
至少一个adc、处理单元、和非易失性存储器;
[0368]
b)对第一磁传感器进行偏置;
[0369]
c)测量第一磁传感器信号;
[0370]
d)对第一磁传感器信号进行放大;
[0371]
e)对第二磁传感器进行偏置,
[0372]
f)测量第二磁传感器信号;
[0373]
g)对第二磁传感器信号进行放大;
[0374]
h)测量温度(t)和/或差分应力信号(δσ)
[0375]
i)使用单个所测得的温度(t)和/或差分应力(δ∑)的预定义函数
[0376]
(例如,使用单个所测得的温度t的预定义函数f(t)、或使用差分应力的预定义函数f(δ∑)、或使用单个所测得的温度和差分应力的预定义函数f(t,δ∑))来调整:
[0377]
第二偏置信号或
[0378]
第二放大器增益或
[0379]
由第二传感器信号导出(例如仅由第二传感器信号导出)的数字值然后确定以下两者之间的差值:
[0380]
从第一磁传感器信号中导出的信号或值,和
[0381]
从第二磁传感器信号中导出的信号或数值
[0382]
以获得磁场差或磁场梯度。
[0383]
方法1200可包括任选的步骤j)将磁场差或梯度信号转换成另一个值,例如转换成电流值或转换成距离值。
[0384]
虽然图12(a)的表述是紧凑的,但不同的步骤没有按时间顺序列出,并且因此可能无法立即辨认。出于该原因,在图12(b)至图12(d)中提供了三种稍微更详细的方法。
[0385]
图12(b)示出图示根据本发明的方法或可用于本发明实施例的方法的流程图,其中第二偏置源或第二放大器增益被调整,并且其中在模拟域中计算出磁传感器信号之间的差值,例如如图3(c)、图3(e)、图4(c)、图4(e)、图5(c)和图5(e)所示。图12(b)的流程图可能比图12(a)的流程图更容易理解,因为步骤是按时间顺序列出的,尽管一些步骤可以并行地执行。
[0386]
方法1220包括以下步骤:
[0387]
a)提供半导体衬底,该半导体衬底包括:
[0388]
沿预定义轴线间隔开的第一磁传感器和第二磁传感器;
[0389]
第一偏置源和第二偏置源;
[0390]
第一放大器和第二放大器;
[0391]
温度传感器和/或差分应力感测电路;
[0392]
(例如,温度传感器,但没有差分应力感测电路;或差分应力感测电路,但没有温度传感器;或既有温度传感器又有差分应力感测电路)
[0393]
adc、处理单元、和非易失性存储器;
[0394]
b)在步骤a之后,
[0395]
测量并数字化温度信号(t)和/或测量并数字化差分应力信号(δσ);
[0396]
c)在步骤b)之后,使用单个温度和/或差分应力的预定义函数
[0397]
(例如,使用单个所测得的温度t的预定义函数f(t)、或使用所测得的差分应力的预定义函数f(δ∑)、或使用单个所测得的温度和所测得的差分应力的预定义函数f(t,δ∑))来调整以下各项中的至少一项:
[0398]
第二偏置信号;
[0399]
第二放大器增益;
[0400]
(d)在步骤c)之后
[0401]
对第二磁传感器进行偏置;
[0402]
测量第二磁传感器信号;
[0403]
对第二磁传感器信号进行放大;
[0404]
e)在步骤a)之后
[0405]
对第一磁传感器进行偏置;
[0406]
测量第一磁传感器信号;
[0407]
对第一磁传感器信号进行放大;
[0408]
f)在步骤d)和步骤e)之后,
[0409]
在模拟域中计算第一磁传感器信号与第二磁传感器信号的差值δv,以及
[0410]
将差值δv数字化为δv,以获得磁场差值或梯度。
[0411]
该方法可包括任选的步骤:
[0412]
g)在步骤f)之后,将磁场差值或磁场梯度值转换为另一个值,例如电流或距离。
[0413]
图12(c)示出图示本发明的方法的流程图,其中第二偏置源或第二放大器被调整,并且其中磁传感器信号之间的差值在数字域中被计算出,例如,如图3(b)、图3(d)、图4(b)、图4(d)、图5(b)、图5(d)、图6(b)、图6(c)、图7(b)、图7(c)、图8(b)、图8(c)所示。该流程图可能比图12(a)的流程图更容易理解,因为步骤是按时间顺序列出的,尽管一些步骤可以并行地执行。
[0414]
方法1240包括以下步骤:
[0415]
a)提供半导体衬底,该半导体衬底包括:
[0416]
沿预定义轴线间隔开的第一磁传感器和第二磁传感器;
[0417]
第一偏置源和第二偏置源;
[0418]
第一放大器和第二放大器;
[0419]
温度传感器和/或差分应力感测电路;
[0420]
(例如,温度传感器,但没有差分应力感测电路;或差分应力感测电路,但没有温度传感器;或既有温度传感器又有差分应力感测电路)
[0421]
adc、处理单元、和非易失性存储器;
[0422]
b)在步骤a之后,
[0423]
测量并数字化温度信号(t)和/或测量并数字化差分应力信号(δσ);
[0424]
c)在步骤b)之后,使用单个温度和/或差分应力的预定义函数;
[0425]
(例如,使用单个所测得的温度t的预定义函数f(t)、或使用所测得的差分应力的
预定义函数f(δ∑)、或使用单个所测得的温度和所测得的差分应力的预定义函数f(t,δ∑))来调整以下各项中的至少一项:
[0426]
第二偏置信号;
[0427]
第二放大器增益;
[0428]
(d)在步骤c)之后
[0429]
对第二磁传感器进行偏置;
[0430]
测量第二磁传感器信号;
[0431]
对第二磁传感器信号进行放大;
[0432]
对第二经放大的信号进行数字化;
[0433]
e)在步骤a)之后
[0434]
对第一磁传感器进行偏置;
[0435]
测量第一磁传感器信号;
[0436]
对第一磁传感器信号进行放大;
[0437]
对第一经放大的信号进行数字化;
[0438]
f)在步骤d)和步骤e)之后,
[0439]
在数字域中计算经放大并且经数字化的第一值a_v1与第二值a_v2corr之间的差值,以获得磁场差或磁场梯度。
[0440]
该方法可包括任选的步骤:
[0441]
g)在步骤f)之后,将梯度值转换为另一个值,例如,电流值或距离值,或按钮状态(例如,按下或未按下)。
[0442]
图12(d)示出了图示出本发明的方法的流程图,其中偏置源和放大器不被调整,并且其中在数字域中计算出信号之间的差值之前,在数字域中对数字信号中的一个数字信号进行校正,例如如图3(f)、图4(f)、图5(f)所示。图12(d)的流程图可能比图12(a)的流程图更容易理解,因为步骤是按时间顺序列出的,尽管一些步骤可以并行地执行。
[0443]
方法1260包括以下步骤:
[0444]
a)提供半导体衬底,该半导体衬底包括:
[0445]
沿预定义轴线间隔开的第一磁传感器和第二磁传感器;
[0446]
第一偏置源和第二偏置源;
[0447]
第一放大器和第二放大器;
[0448]
温度传感器和/或差分应力感测电路;
[0449]
(例如,温度传感器,但没有差分应力感测电路;或差分应力感测电路,但没有温度传感器;或既有温度传感器又有差分应力感测电路)
[0450]
adc、处理单元、和非易失性存储器;
[0451]
b)在步骤a之后,
[0452]
测量并数字化温度信号(t)和/或测量并数字化差分应力信号(δσ);
[0453]
c)在步骤b)之后
[0454]
对第二磁传感器进行偏置;
[0455]
测量第二磁传感器信号;
[0456]
对第二磁传感器信号进行放大;
[0457]
对第二经放大的信号进行数字化;
[0458]
d)在步骤a)之后
[0459]
对第一磁传感器进行偏置;
[0460]
测量第一磁传感器信号;
[0461]
对第一磁传感器信号进行放大;
[0462]
对第一经放大的信号进行数字化;
[0463]
e)在步骤c)之后,
[0464]
使用单次测得的温度和/或差分应力的预定义函数对第二数字值进行校正,
[0465]
(例如,使用单个所测得的温度t的预定义函数f(t)、或使用所测得的差分应力的预定义函数f(δ∑)、或使用单个所测得的温度和所测得的差分应力的预定义函数f(t,δ∑))
[0466]
f)在步骤d)和步骤e)之后,
[0467]
在数字域中计算第一数字值a_v1与经校正的第二数字值a_v2corr之间的差值,以获得磁场差或磁场梯度。
[0468]
该方法可包括任选的步骤:
[0469]
g)在步骤f)之后,将梯度值转换为另一个值,例如,电流值或距离值,或按钮状态(例如,按下或未按下)。
[0470]
在对本发明的若干实施例进行了详细描述之后,本领域技术人员可以容易地提出进一步的修改。例如,虽然各实施例针对提供电压信号(该电压信号被放大和/或被相减和/或被数字化)的磁传感器进行了描述,但在实际实现方式中,电压信号在被放大和/或被相减和/或被数字化之前,可以被转换为电流信号。
[0471]
本发明描述了用于改善磁场差或空间磁场梯度的准确性的技术。但同样的技术也可以用于改善二阶梯度的准确性,例如可以通过将两个第一阶梯度相减、或者通过形成三个磁场分量值的线性组合(诸如例如b1
‑
2*b2+b3,其中b1、b2和b3是由位于轴线上的三个磁传感器导出的,b2位于b1和b3之间的中间)来获得二阶梯度。同样的技术也可用于改善更高阶梯度(具有大于2的阶数)的准确性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1