一种基于扩散映射的水下声源匹配场定位方法
1.本发明涉及的是一种水下声纳阵列信号处理算法,特别是一种基于扩散映射的水下声源匹配场定位方法,可应用于声纳阵列在低信噪比环境下的被动声源定位,属于水声阵列信号处理领域。
背景技术:
2.匹配场处理技术通过传统的阵列信号处理方法与基于海洋环境特性的声场模型相结合,成为目标声源被动探测的主要手段之一。该方法将声源、环境和接收阵列作为一个整体系统,通过对接收阵列的实际测量声信号与理论模型预测的声场做相关匹配,即可实现声源位置的估计。但是考虑到匹配场处理具有非线性的特性,其输出模糊度表明会出现复杂的多模结构,因此其处理性能具有明显的门限效应,即匹配场算法会随着信噪比的降低,算法的均方误差逐渐增大,具体表现为旁瓣模糊;特别的,在信噪比很低的条件下,算法性能下降严重,无法实现对目标的探测定位。
技术实现要素:
3.针对上述现有技术,本发明要解决的技术问题是提供一种能够实现在低信噪比环境下的探测定位的基于扩散映射的水下声源匹配场定位方法。
4.为解决上述技术问题,本发明的一种基于扩散映射的水下声源匹配场定位方法,包括以下步骤:
5.步骤1:通过时频分析处理实测数据得到声信号的频率信息,计算对应频点的协方差矩阵r,并对该矩阵进行矩阵范数的归一化,得到归一化协方差矩阵rf;
6.步骤2:根据频率和海深选择声场模型,根据阵列各个阵元布放深度,建立相应的拷贝场距离和深度网格,计算拷贝场向量和相应的拷贝场向量矩阵g
i
,i=1~m表示不同网格点位置,m为全部网格个数,对拷贝场向量矩阵进行矩阵范数的归一化,得到不同网格点上归一化拷贝场向量矩阵gf
i
;
7.步骤3:构建一个矩阵集合a,包含全部的归一化拷贝场向量矩阵和归一化协方差矩阵,共m+1个元素,集合中第一个元素a1为归一化协方差矩阵rf,第二个元素a2至a
m+1
为各个网格点上的归一化拷贝场向量矩阵gf1至gf
m
;
8.计算a中各个元素之间的指数黎曼距离b
kj
,将全部的指数黎曼距离构造为一个维度m+1的仿射方阵b,方阵b中第k行第j列的元素b
kj
为集合a中第k个矩阵和j个矩阵之间的指数黎曼距离,b
kj
满足:
9.b
kj
=exp[
‑
{tr[a
k
]+tr[a
j
]
‑
2tr[(a
k
a
j
)
1/2
]}/σ2]
[0010]
其中,k=1~m+1,j=1~m+1,tr表示矩阵对应的迹,σ2为仿射矩阵的度量比;
[0011]
步骤4:根据仿射矩阵b构造扩散核矩阵p,并对扩散核矩阵p进行特征分解得到特征值和特征向量,根据特征值和特征向量构造出扩散映射图;
[0012]
步骤5:计算扩散映射图中各个拷贝场向量矩阵对应位置χ
t
(a
i
)与协方差矩阵在扩
散映射图中的位置χ
t
(a1)之间的距离,其中i=2~m+1,具体为:
[0013][0014]
其中,||
·
||表示计算向量的l2范数;
[0015]
对所有距离和深度网格进行遍历,寻找功率最小的网格位置,即矩阵间距离最短,该网格位置即为被动声源的定位位置。
[0016]
本发明还包括:
[0017]
1.步骤4中根据仿射矩阵b构造扩散核矩阵p具体为:
[0018][0019]
p=d
‑1b.
[0020]
其中,d为对角矩阵,对角线元素分别为仿射矩阵b中各列元素之和。
[0021]
2.步骤4中对扩散核矩阵p进行特征分解得到特征值和特征向量,根据特征值和特征向量构造出扩散映射图具体为:
[0022]
[γ,ψ]=eig(p),
[0023][0024]
其中,eig表示对矩阵p特征分解,γ和ψ分别表示全部特征值和特征向量集合,特征值从大到小依次排列;构造扩散映射图χ
t
(a),其中第i个向量元素χ
t
(a
i
)为集合a中第i个矩阵a
i
在扩散映射图中对应的位置,由第2个至第q个的特征值和对应特征向量的第i个值相乘组成,t的取值范围是2
‑
5之间,q的取值范围是阵元数的一半至阵元数之间。
[0025]
本发明的有益效果:分析匹配场技术中的常规bartlett处理器,其原理主要为功率谱密度矩阵与拷贝场向量进行相关运算。从纯数学的角度分析,bartlett处理器主要度量了功率谱密度矩阵与拷贝场向量矩阵之间的相似性。根据功率谱密度矩阵的埃尔米特共轭性和半正定性的特点,可以根据非欧几何中的黎曼距离来度量矩阵间的相似性。本发明通过对拷贝场向量矩阵和功率谱密度矩阵共同张成的高维黎曼空间进行降维运算,基于扩展映射理论提取仿射矩阵间度量中受噪声影响小的成分,构造出基于扩展映射的匹配场定位处理器,进而实现算法在低信噪比环境下的探测定位,可以有效降低旁瓣级,提高主瓣分辨率。
[0026]
本发明不同于其他的常规匹配场定位方法,本发明利用协方差矩阵具有的共轭对称性和正定性,引入矩阵的度量概念,将矩阵间的黎曼距离投影至低维空间,通过计算低维空间内点与点之间的距离,构造出基于扩散映射的匹配场处理器,其具有以下优点:(1)低信噪比环境下有效地对目标声源进行被动定位;(2)相比常规处理器,所提算法的主瓣宽度更窄、旁瓣级更低,有效地提高定位性能。
附图说明
[0027]
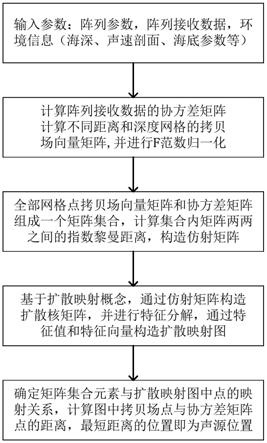
图1是基于扩散映射的匹配场处理器流程图
[0028]
图2是接收信噪比为
‑
25db时,本发明基于扩散映射的匹配场算法和常规bartlett匹配场算法的定位结果对比图,左侧图(a)为本发明所提算法结果,右侧图(b)为常规
bartlett算法结果;
[0029]
图3是接收信噪比为
‑
25db时,本发明基于扩散映射的匹配场算法在距离和深度维剖面的输出功率对比,左侧图(a)为距离维模糊度输出,右侧图(b)为深度维剖面的模糊度输出;
[0030]
图4是接收信噪比为
‑
40db时,本发明基于扩散映射的匹配场算法和常规bartlett匹配场算法的定位结果对比图,左侧图(a)为本发明所提算法结果,右侧图(b)为常规bartlett算法结果;
[0031]
图5是接收信噪比为
‑
40db时,本发明基于扩散映射的匹配场算法在距离和深度维剖面的输出功率对比,左侧图(a)为距离维模糊度输出,右侧图(b)为深度维剖面的模糊度输出;
具体实施方式
[0032]
下面结合说明书附图和具体实施方式对本发明做进一步说明。
[0033]
本发提供一种低信噪比环境下对目标声源被动定位的方法,基于全部拷贝场向量矩阵和协方差矩阵的集合建立扩散映射图,基于映射图上点与点之间的距离构造匹配场处理器,所述部分可用于信噪比低于零分贝的环境下进行声源被动定位。具体实现步骤为:
[0034]
步骤1:根据阵列实测数据,通过时频分析等技术获得声源信号的频率信息,计算对应频点的协方差矩阵,并对该矩阵进行范数归一化;
[0035]
步骤2:基于阵列各个阵元布放深度,建立相应的拷贝场距离和深度网格,根据频率和海深选择适当的声场模型,计算拷贝场向量和相应的拷贝场向量矩阵,并进行范数归一化;
[0036]
步骤3:将全部网格点处的拷贝场向量矩阵和协方差矩阵构建为一个矩阵集合,计算集合内矩阵两两之间的指数黎曼距离;
[0037]
步骤4:根据距离矩阵构造扩散核矩阵(传递矩阵),并对其进行特征分解,根据特征值和特征向量构造出扩散映射图;
[0038]
步骤5:计算扩散映射图上协方差矩阵与不同拷贝场向量矩阵的距离,最短距离对应的位置即为声源位置。
[0039]
结合图1,本发明是基于扩散映射的匹配场定位方法,主要包括建立拷贝场向量矩阵和协方差矩阵集合及其矩阵间黎曼距离,与基于扩散映射将黎曼距离投影至低维空间并计算扩散映射图点与点之间的距离两部分,具体为:
[0040]
步骤1:通过时频分析等处理实测数据得到声信号的频率信息,计算窄带协方差矩阵r。根据频率和海深选择适当的声场模型,基于阵列各个阵元布放深度,建立相应的拷贝场距离和深度网格,计算拷贝场向量和相应的拷贝场向量矩阵g
i
,其中g表示拷贝场向量矩阵,i=1~m表示不同网格点位置,m为全部网格个数。对全部的拷贝场向量矩阵和协方差矩阵进行矩阵f范数的归一化,得到不同网格点上归一化拷贝场向量矩阵gf
i
和归一化协方差矩阵rf。
[0041]
步骤2:构建一个矩阵集合a,包含全部的归一化拷贝场向量矩阵和协方差矩阵,共m+1个元素,集合中第一个元素a1为归一化协方差矩阵rf,第二个元素a2至a
m+1
为各个网格点上的归一化拷贝场向量矩阵gf1至gf
m
。计算a中各个元素之间的指数黎曼距离,如(1)所示,
将全部的指数黎曼距离b
kj
构造为一个维度m+1的仿射方阵b,方阵b中第k行第j列的元素b
kj
为集合a中第k个矩阵和j个矩阵之间的指数黎曼距离,其中k=1~m+1,j=1~m+1,tr表示矩阵对应的迹,σ2为仿射矩阵的度量比,该值与阵列接收数据有关,用以度量流形上两点之间的距离。可以看出,方阵b为实对称矩阵。
[0042]
b
kj
=exp[
‑
{tr[a
k
]+tr[a
j
]
‑
2tr[(a
k
a
j
)
1/2
]}/σ2]
ꢀꢀꢀ
(1)
[0043]
步骤3:基于扩散映射理论,通过仿射矩阵b构造扩散核矩阵p,具体过程如式(2)所示,其中d为对角矩阵,对角线元素依次为仿射方阵b中各列元素之和。对核矩阵p进行特征分解,得到特征值和特征向量,从而构造扩散映射图,如式(3)所示,其中eig表示对矩阵p特征分解,γ和ψ分别表示全部特征值和特征向量集合,特征值从大到小依次排列。构造扩散映射图χ
t
(a),其中第i个向量元素χ
t
(a
i
)为集合a中第i个矩阵a
i
在扩散映射图中对应的位置,由第2个至第q个的特征值和对应特征向量的第i个值相乘组成。一般而言,式(3)中t的取值范围是2
‑
5之间,q的取值范围是阵元数的一半与阵元数之间。
[0044][0045][0046]
步骤4:根据式(3)中矩阵在扩散映射图的对应关系,由于χ
t
(a1)为协方差矩阵在扩散映射图中的位置,计算扩散映射图中各个拷贝场向量矩阵对应位置χ
t
(a
i
)与χ
t
(a1)之间的距离,其中i=2~m+1,如式(4)所示,其中||
·
||表示计算向量的l2范数。对所有距离和深度网格进行遍历,寻找功率最小的网格位置(矩阵间距离最短),该网格位置即为被动声源的定位位置。
[0047][0048]
在低信噪比环境下,并且阵列为非均匀半波长阵列时,基于扩展映射的匹配场算法与常规bartlett处理器在信噪比为
‑
25db和
‑
40db条件下的定位结果如图2和图4所示;
[0049]
图2为在浅海仿真环境下(127m海深,声源深度70m,收发水平距离7km,阵列孔径为94m,阵元间距为4m,接收信噪比为
‑
25db),基于扩散映射的匹配场算法(左侧(a)部分)和常规bartlett匹配场算法(右侧(b)部分)的定位结果对比,可以看出后者定位结果其旁瓣级更低,主瓣宽度更窄;
[0050]
图4是在浅海仿真环境下(127m海深,声源深度70m,收发水平距离7km,阵列孔径为94m,阵元间距为4m,接收信噪比为
‑
40db),基于扩散映射的匹配场算法(左侧(a)部分)和常规bartlett匹配场算法(右侧(b)部分)的定位结果对别,可以看出后者定位结果其旁瓣级更低,主瓣宽度更窄;
[0051]
图3和图5分别为
‑
25db和
‑
40db条件下,所提算法在距离维和深度维剖面的模糊度输出,选取位置为输出最大功率位置处的距离和深度剖面;
[0052]
图3是在图2环境参数条件下,基于扩散映射的匹配场定位算法在距离维(左侧(a)部分)和深度维剖面(右侧(b)部分)的模糊度输出对别,选取输出最大功率位置处的距离和深度剖面,可以看出算法定位的声源位置为(7040m,74m),并且深度估计的输出功率比其他
旁瓣位置高20db以上;
[0053]
图5是在图4的环境参数条件下,基于扩散映射的匹配场定位算法在距离维(左侧(a)部分)和深度维剖面(右侧(b)部分)的模糊度输出,选取输出最大功率位置处的距离和深度剖面,可以看出算法定位的声源位置为(6760m,76m),并且深度估计的输出功率比其他旁瓣位置高10db以上;对比结果可以明显看出,在低信噪比条件下,所提算法可以有效地对目标声源进行有效定位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1