一种基于云端的船舶黑烟不透光度激光阵列检测系统的制作方法
1.本发明涉及船舶尾气检测领域,特别是涉及一种基于云端的船舶黑烟不透光度激光阵列检测系统,具有测量距离可调设计、云端数据传输控制的激光无接触式远程船闸位置船舶黑烟不透光度激光检测系统。
背景技术:
2.在随着交通环境保护、生态节能理念的提出发展,对交通领域内河港航轮船尾气排放标准提出了更高的要求。内河航道具有河道复杂,航道宽度不一致,无法设置限高杆,网络线路远程布置成本高等场景特点,对尾气不可见度检测仪器的测量距离可调节性,安装方式航道兼容性以及无线远程传输功能提出了更高要求。基于云端传输技术的船闸位置船舶黑烟不透光度激光检测系统以其云传输、高精度、无接触测量等特性,在船舶尾气不可见度监测领域中发挥着重要作用。
3.近年来,已经提出了多种针对船舶尾气黑烟不透光度检测系统,如:1,嗅探式尾气监测仪,测量尾气黑烟不透光度准确度高,但缺点在于必须由工作人员到场实地检测,检测效率低;2,摄像设备尾烟黑度监测,通过照片图像的黑度结合图像处理算法实现船舶尾气不可见度测无量,但是这种方法受天气影响大,不同光照条件下检测结果会产生差异,精度较低。
技术实现要素:
4.本发明的目的是针对现有船舶尾气不可见度监测技术的不足,本文提出了一种基于云端的船舶黑烟不透光度激光阵列检测系统,具有测量距离可调设计、云端数据传输控制的激光无接触式测量。解决了内河航道宽度多变可调测量、避免了远程网线铺设,提高了内河航道船闸处等复杂环境下船舶尾气不可见度智能化检测效率:
5.本发明公开了一种基于云端的船舶黑烟不透光度激光阵列检测系统,包括:
6.激光阵列检测模块、放大电路、采集电路、中央处理器、4g收发模块;
7.激光阵列检测模块通过放大电路分别与采集电路、中央处理器连接,用于通过将激光阵列检测模块设置在船闸的两端,检测船舶黑烟的不透光度;
8.采集电路与央处理器连接;
9.4g收发模块分别与采集电路、中央处理器连接。
10.优选地,激光阵列检测模块包括若干组船舶尾气探测单元,其中,每个船舶尾气探测单元包括532nm脉冲激光器、可变放大倍率扩束器、硅光探测器;
11.532nm脉冲激光器与可变放大倍率扩束器连接;
12.硅光探测器与放大电路连接。
13.优选地,可变放大倍率扩束器用于将532nm脉冲激光器发射的激光输出光斑扩束整形,形成一列直径10
‑
15mm的激光光斑。
14.优选地,船闸位置船舶黑烟不透光度激光阵列检测系统还包括,云端服务器、云台
摄像机、计算机;
15.云端服务器用于收集中央处理器通过4g收发模块发射的目标船舶的不透光度;
16.计算机通过对不透光度进行分析,根据分析结果控制云台摄像机对目标船舶进行拍摄取证。
17.优选地,中央处理器为stm32单片机。
18.优选地,计算机(10)通过对不透光度进行分析的方法,包括以下步骤:
19.s1.确定532nm脉冲激光器发射激光的入射光强和透射光强的光强关系;
20.s2.根据光强关系,计算船舶黑烟的不透光度,构建光吸收系数判断模型;
21.s3.基于光吸收系数判断模型,判断船舶黑烟是否超标。
22.优选地,光强关系的表达方程为:
23.i=i0·
e
‑
kl
=i0·
e
‑
acl
24.其中,k为光吸收系数,单位m
‑1;l为光路经过黑烟的有效长度;a表示分子吸收率,与吸收介质性质有关;c表示颗粒污染物浓度,单位g/m3。
25.优选地,对于稳定介质和固定的探测光波长,a为常数。
26.优选地,不透光度表示为:
27.n=1
‑
τ=1
‑
i/i0=1
‑
e
‑
kl
28.其中,τ为透光度,n为不透光度,k为光吸收系数;
29.光吸收系数判断模型表示为:
30.k=
‑
(1/τ)ln(1
‑
n)。
31.优选地,一种基于云端的船舶黑烟不透光度激光阵列检测系统的工作方法,将532nm脉冲激光器紧贴船闸的一侧的凹槽平面布置,激光发射方向对准对岸平行位置,可变放大倍率扩束器与532nm脉冲激光器的输出端口衔接,调节可变放大倍率扩束器的放大倍率,将激光输出光斑扩束整形,在船闸的另一侧的对应位置处形成一列直径10
‑
15mm的激光光斑,由硅光探测器接收;硅光探测器反馈电流信号经由放大电路放大并进行a/d转换,转换成的电压信号被采集电路收集,经中央处理器计算处理,将数据结果通过4g收发模块发送到云端服务器;计算机通过云端服务器访问数据结果,并通过云端给云台摄像机发送指令,控制其摄像拍照留证;云台摄像机与云端服务器之间通过云台摄像机的内置摄像机4g收发模块联通。
32.本发明公开了以下技术效果:
33.本发明的技术方案并与现有技术相比,本发明产生的有益效果是:
34.1、通过532nm激光器搭配可调可变放大倍率扩束器以及硅光探测器,可以实现激光无接触测量范围的可调节性,对于宽度复杂多变的内河航道、船闸附近领域监测具有极高的兼容性。
35.2、采用激光阵列的形式,使得黑烟轮廓最大程度的被激光光路覆盖,根据不可见度计算原理,对各路激光损耗分别计算,由中央处理器统一管理,选取不可见度最高的一路激光光束作为最终不可见度计算结果,可以避免受风、气流影响导致的黑烟轮廓不均匀、不规则导致的测量误差。
36.3、通过云端传输控制,实现了数据传输、接受以及摄像控制的无线云处理化。提高了数据收发效率,减少了偏远地区航道铺设网络线路的费用;
37.4、激光不可见度监测与摄像影像互相作证,智能化报警,取证,具有更高的准确性和污染可查性。操作人员可实现远距离多台设备并行处理,不需要停船监测,实现了不可见度监测智能化,提高运行航运效率,降低人工成本,有助于航运管理效率与环境保护手段的共同提高。
附图说明
38.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还根据这些附图获得其他的附图。
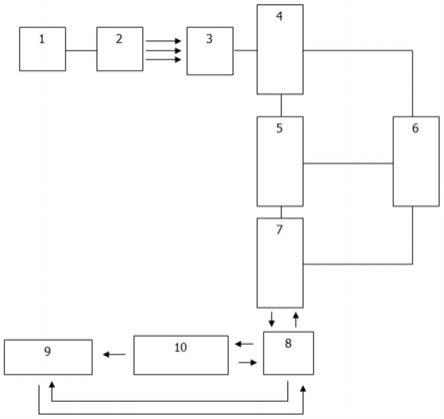
39.图1为本发明的基于云端的船闸位置船舶黑烟不透光度激光阵列检测系统结构示意图;
40.图2为本发明实施例所述的系统流程示意图;
41.图3为将本发明的基于云端的船闸位置船舶黑烟不透光度激光阵列检测系统船闸航道安装示意图;
42.其中:1、532nm脉冲激光器,2、可变放大倍率扩束器,3、硅光探测器,4、放大电路,5、采集电路,6、中央处理器,7、4g收发模块,8、云端服务器,9、云台摄像机,10、计算机。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.如图1
‑
3所示,本发明公开了一种基于云端的船舶黑烟不透光度激光阵列检测系统,包括:
45.激光阵列检测模块、放大电路4、采集电路5、中央处理器6、4g收发模块7;
46.激光阵列检测模块通过放大电路4分别与采集电路5、中央处理器6连接,用于通过将激光阵列检测模块设置在船闸的两端,检测船舶黑烟的不透光度;采集电路5与中央处理器6连接;4g收发模块7分别与采集电路5、中央处理器6连接。
47.激光阵列检测模块包括若干组船舶尾气探测单元,其中,每个船舶尾气探测单元包括532nm脉冲激光器1、可变放大倍率扩束器2、硅光探测器3;532nm脉冲激光器1与可变放大倍率扩束器2连接;硅光探测器3与放大电路4连接。
48.可变放大倍率扩束器2用于将532nm脉冲激光器1发射的激光输出光斑扩束整形,形成一列直径10
‑
15mm的激光光斑。
49.船闸位置船舶黑烟不透光度激光阵列检测系统还包括,云端服务器8、云台摄像机9、计算机10;云端服务器8用于收集中央处理器6通过4g收发模块7发射的目标船舶的不透光度;计算机10通过对不透光度进行分析,根据分析结果控制云台摄像机9对目标船舶进行拍摄取证。
50.中央处理器为stm32单片机。
51.计算机10通过对不透光度进行分析的方法,包括以下步骤:
52.s1.确定532nm脉冲激光器发射激光的入射光强和透射光强的光强关系;
53.s2.根据光强关系,计算船舶黑烟的不透光度,构建光吸收系数判断模型;
54.s3.基于光吸收系数判断模型,判断船舶黑烟是否超标。
55.光强关系的表达方程为:
56.i=i0·
e
‑
kl
=i0·
e
‑
acl
57.其中,k为光吸收系数,单位m
‑1;l为光路经过黑烟的有效长度;a表示分子吸收率,与吸收介质性质有关;c表示颗粒污染物浓度,单位g/m3。
58.对于稳定介质和固定的探测光波长,a为常数。
59.不透光度表示为:
60.n=1
‑
τ=1
‑
i/i0=1
‑
e
‑
kl
61.其中,τ为透光度,n为不透光度,k为光吸收系数;
62.光吸收系数判断模型表示为:
63.k=
‑
(1/τ)ln(1
‑
n)。
64.一种基于云端的船舶黑烟不透光度激光阵列检测系统的工作方法,将532nm脉冲激光器1紧贴船闸的一侧的凹槽平面布置,激光发射方向对准对岸平行位置,可变放大倍率扩束器2与532nm脉冲激光器1的输出端口衔接,调节可变放大倍率扩束器2的放大倍率,将激光输出光斑扩束整形,在船闸的另一侧的对应位置处形成一列直径10
‑
15mm的激光光斑,由硅光探测器3接收;硅光探测器3反馈电流信号经由放大电路4放大并进行a/d转换,转换成的电压信号被所述采集电路5收集,经中央处理器6计算处理,将数据结果通过4g收发模块7发送到云端服务器8;计算机10通过云端服务器8访问数据结果,并通过云端给云台摄像机9发送指令,控制其摄像拍照留证;云台摄像机9与云端服务器8之间通过云台摄像机9的内置摄像机4g收发模块联通。
65.实施例1:该船舶黑烟不透光度激光检测系统包括多组532nm脉冲激光器(1)、可变放大倍率扩束器(2)、硅光探测器(3)、放大电路(4)、采集电路(5)、中央处理器(6)、4g收发模块(7)、云端服务器(8)、云台摄像机(9)以及计算机(10);其中,532nm脉冲激光器(1)紧贴船闸凹槽平面布置,激光发射方向对准对岸平行位置,可变放大倍率扩束器(2)与532nm脉冲激光器(1)输出端口衔接,调节扩束器放大倍率,将激光输出光斑扩束整形,在对岸船闸对应位置处形成一个直径10
‑
15mm的激光光斑,由对应的硅光探测器(3)接收。硅光探测器(3)反馈电流信号经由放大电路(4)放大并进行a/d转换,转换成的电压信号被采集电路(5)收集,经中央处理器(6)计算处理,将数据结果通过4g收发模块(7)发送到云端服务器(8)。计算机(10)通过云端服务器(8)访问数据结果,并通过云端给云台摄像机(9)发送指令,控制其摄像拍照留证。云台摄像机(9)与云端服务器(8)之间通过摄像机内置的4g收发模块联通;
66.系统运行时,将处于工作状态的多组532nm脉冲激光器(1)与可变放大倍率扩束器(2)衔接、调节扩束器的放大倍率,使激光光斑整形聚焦后,照射到对岸船闸处的光斑直径保持在10
‑
15mm。按照光学设计调整对应的硅光探测器(3)位置,使激光光斑位于其探测面正中,保证激光强度完全被探测器接受,不存在遮挡。激光器与扩束器作为发射端安装在船闸一侧,硅光探测器(3)及配套的放大电路(4)和采集电路(5)布置在船闸另一侧。硅光探测
器(3)将接收到的光信号转换成电信号,输出信号电流强度,经由放大电路(4)放大并进行a/d转换最终由采集电路(5)采集,中央处理器(6)对采集电路(5)采集的电压信号进行分析处理,通过4g收发模块(7)发送给云端服务器(8),并通过云端服务器(8)传送给计算机(10),计算机进行数据结果显示/报警,并通过云端调动云台摄像机(9)对现场进行摄影拍照取证。
67.根据beer
‑
lambert定律,
68.当激光光束穿过黑烟介质时,入射光强i0与透射光强i关系可表示为:
69.i=i0·
e
‑
kl
=i0·
e
‑
acl
70.其中,k为光吸收系数,单位m
‑1;l为光路经过黑烟的有效长度;a表示分子吸收率,与吸收介质性质有关;c表示颗粒污染物浓度,单位g/m3。其中,对于稳定介质和固定的探测光波长,a为常数。
71.不透光度n可表示为:
72.n=1
‑
τ=1
‑
i/i0=1
‑
e
‑
kl
,
73.其中,τ为透光度;
74.光吸收系数k可表示为:
75.k=
‑
(1/τ)ln(1
‑
n)
76.当检测光路中没有黑烟时,激光在船闸宽度空气中传输损耗很低,i≈i0,此时,不透光度n=0。
77.而当船舶经过时,尾气黑烟覆盖光路,i<i0,不透光度n>0。n的数值大小由船舶黑烟遮盖光路的范围和黑烟粒子浓度及其对光的吸收率有关。因此可以通过测定不透光度n,来判断船舶尾气黑烟是否满足国家对尾气不透光度的排放标准。
78.基于云端数据传输技术的船闸位置船舶黑烟不透光度激光阵列检测系统具有可调的测量范围,可根据航道宽度要求灵活设计,采用云端进行数据传输与控制,配合摄像设备可实现船舶尾气不可见度的准确实时智能化监测,因此具有广泛的应用范围。
79.以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1