用于控制车辆的方法与流程
1.本发明涉及一种用于控制由用户推动的车辆的方法,其中在车辆上设置有发送器和接收器以及控制器和能量源,其中发送器发出信号并且接收器接收该信号的反射。本发明还涉及一种用于实施该方法的计算机程序以及计算机和一种实施该方法的车辆。
背景技术:
2.公知没有电子控制器的手推式车辆。这些历史悠久的车辆由用户的纯人力推动。在这种历史悠久的车辆的情况下,除了由于需要施加人力而引起的显著劳顿和低舒适性之外,车辆的安全性也降低。如果例如用户松开被设置用于推动车辆的手柄,同时有下坡力作用于车辆,则车辆可能不受控制地行驶并且也许发生事故。低舒适性的问题近来由于车辆的电气化而被缓解,为此将电驱动装置与车辆连接,这些电驱动装置使用户减少了至少一部分所要施加的能量。然而,这些电气化的常规车辆加剧了这些历史悠久的车辆的安全性的缺乏,因为当用户失去对车辆的控制时可能发生车辆的不受控制的加速。
技术实现要素:
3.本发明所基于的任务在于提供一种方法,该方法提高了电气化的手推式车辆的安全性。
4.提出了设置一种车辆,该车辆优选地由用户的手来推动和拉动,例如在童车和/或手推车的情况下如此。为了控制器可以按照该方法来影响车辆,控制器依据反射来确定在用户的身体上的至少两个位置,在用户移动时,所述至少两个位置具有相对于彼此方向相反的运动。这两个点至少暂时具有如下相对速度,所述相对速度指向不同的方向和/或尤其是指向相反的方向。优选地,在用户移动期间,这些位置的不仅相对速度而且相对距离都随着时间周期性地发生变化。
5.由于这些位置及其运动的反射,形成反射图案,在接收到反射之后,该反射图案被控制器分析。为此,控制器将反射的反射图案与存储在控制器中的测试图案进行比较。控制器具有存储器,在该存储器中可以存放测试图案。测试图案对应于由用户产生的典型反射图案。在此,尤其是这两个位置对于反射图案来说是决定性的而且借此对于测试图案来说是决定性的。这两个图案彼此间的比较可以由微处理器来实施,该微处理器是控制器的部分。还可以在控制器中实施比较过程所基于的算法。例如,测试图案可以通过关于这些位置的速度和/或这些位置彼此间的距离和/或距车辆的距离方面的特征来被表征。依据这些特征,可以将反射图案与测试图案进行比较。
6.如果反射图案和测试图案彼此匹配,则控制器依据该算法假定在车辆区域有用户在场。该匹配可以只是部分地存在,以便确认用户在场。优选地,不必存在完全匹配。尤其是,表征测试图案的特征可以只是部分地与反射图案的特征匹配,以便确认用户在场。例如,所有特征中的一半以上可以彼此匹配,以便确认用户在场。也可以根据情况来估计所需的匹配程度。
7.如果不匹配、即存在反射图案与测试图案的差异,则确认用户不在场。一旦达到一定程度的差异,就可以确认该差异。例如,在少于所有特征的50%匹配的情况下,可以确认有差异。在该差异的情况下,也可以根据情况来使所需的确认程度适配。
8.例如,对确认在场或不在场的程度的根据情况的适配可以在有干扰影响反射时被实施。
9.该方法可以作为计算机程序在车辆的控制器上被实施。该方法的算法可以由该计算机程序来确定。替选地或补充地,该计算机程序可以在像智能电话那样的外部计算机上被实施。该计算机程序可以提供用户界面,使得用户可以影响该算法。例如,可以使学习新的测试图案成为可能。每个用户都可以依据存放在智能电话中的标志符或者其它的能以无线方式读出的唯一标志符来被识别。在识别出相应的用户之后,提供相对应的测试图案,用于由控制器与反射图案进行比较。给被教导的每个测试图案都配备相对应的标志符。这样,在用户的身体上的不同位置的表征性的运动过程可以被存储在控制器中。例如,测试图案以及借此还有反射图案的特征可能因用户而异,其中例如用户的走路方式、身高、体重和/或健康状态有变化。学习算法可以在云中和/或在本地被实施。
10.在车辆的一个有利的扩展方案中,可以设置驱动装置和/或制动装置,该驱动装置和/或该制动装置由控制器来控制。向驱动装置和/或制动装置发出的控制指令可以结合对用户在场和/或用户不在场的确认来实现。经此,控制器可以实施安全相关的功能,这些安全相关的功能在用户不在场时确保了车辆的安全性。例如,当确认用户不在场时可以激活制动器,和/或当确认用户在场时可以开启驱动装置。
11.为了确保车辆的高安全性,在确认反射图案与测试图案有差异的情况下可以引入不在场反应,该不在场反应尤其表现为车辆的制动过程。制动过程可以通过制动器和/或驱动装置来实现。制动过程可引起速度降低或者甚至引起车辆停下。在车辆没有制动器和/或没有驱动装置的情况下,可以向用户输出信息。这可以通过声音和/或视觉信号来实现。也可以将消息输出到智能电话上。
12.替选地或补充地,在反射图案发生变化并且同时确认反射图案与测试图案匹配的情况下,可以实施在场反应,如保持速度恒定和/或车辆的加速过程。例如当用户开始将车辆推上坡时情况如此,因为用户在这种情况下由于阻力增大而改变了他的运动过程,但是仍然在场。在这种情况下,驱动装置可以辅助用户,以便确保车辆的交通安全并且同时确保用户一定的舒适性。
13.有利地,接收器和/或发送器可具有角度分辨,使得可以实现对反射图案的至少二维区分、尤其是在垂直和水平方向上的区分,其中尤其可以识别双腿的反射图案。也可以根据以例如球坐标和/或圆柱坐标的空间角度来进行分辨。根据角度的区分可以通过多个发送器来实现,这些发送器优选地用不同的信号来进行发送,这些不同的信号在接收到之后借助于滤波器来予以区别。替选地或补充地,可以使用多个接收器或具有多个接收单元的一个接收器,用以根据角度来进行区分。例如应该对用户的身体上的至少两个区域进行区别,其中每个区域都包含至少一个位置,该位置给反射图案配备特征。优选地,可以对三个区域进行区别,在一个优选的扩展方案中,这三个区域分别是用户的腿和躯干区域。在这三个区域中的每个区域,都可以规定至少一个位置,该位置给反射图案配备特征。由于角度分辨,可以接收到准确且配备有所有必要特征的反射图案,该反射图案能够实现与测试图案
的可靠的比较。
14.优选地,发送器可以发出经调制的连续信号、尤其是调频连续波信号,使得距车辆的用户距离和/或用户远离和/或接近车辆的释放速度被测量。用户距离是用户距车辆或距接收器和/或发送器的绝对距离。该距离可以与用户的身体上的区域、点和/或位置有关。在这种情况下,该测量尤其是基于已经借助于标志符在对车辆的控制方面进行登记的用户。该登记可以借助于智能电话来实现。替选地或补充地,该测量可以基于直接站在发送器的发送范围内的用户。释放速度是用户远离或接近车辆的速度。在此,释放速度是用户远离或接近车辆的关于数值和方向的绝对速度。例如,释放速度和/或释放加速度是当用户在斜面上松开车辆并且车辆由于下坡力而开始有速度地从用户处滚动的速度和/或加速度。
15.在一个特别的实施方式中,至少一个第一位置可以关于其距离和/或其速度方面具有相对于第二位置而言有相移的周期性成形的反射。彼此间有相移的反射可以是反射图案的组成部分。在此,相移的数值、各个反射的幅度和/或各个反射的频率可以分别是反射图案的特征。通过反射图案所测量到的距离可以是两个位置彼此间的相对距离和/或相应的位置距车辆的用户距离。通过反射图案所测量到的速度可以是两个位置彼此间的相对速度和/或用户与车辆的释放速度。
16.可以是适宜的是:在用户的每条腿上定位至少一个位置,使得关于相对于车辆的腿距离和/或腿速度来测量双腿的运动。腿距离是相应的腿距车辆的绝对距离。腿速度是相应的腿相对于车辆的绝对速度。由于双腿在行走和/或跑动时实施交替向前和向后运动,所述交替向前和向后运动彼此间具有一定的对称性或相位关系,所以可以至少暂时产生反射图案,可以可靠性高地将这些反射图案与测试图案进行比较。双腿的交替运动引起相应的腿的周期性运动,这些周期性运动可产生反射图案的特征。例如,这样在非常短的时间段内就已经可以产生清晰的反射图案,优选地,将这些反射图案与所教导的尤其是依据相应的标志符来标识的特定用户的测试图案进行比较。以这种方式,跛行或残障人士的反射图案也可以明确地被分派给测试图案并且被用于标识特定用户。
17.可以规定:如果有新用户开始推动车辆,则可以启动自学习算法,其中该新用户依据数字标志符、尤其是智能电话的数字标志符来被识别。如果将控制器置于自学习模式,则可以依据第一反射图案来记录测试图案,该第一反射图案被临时或持久存储在存储器中。第一反射图案可以在特定时间段内被记录,并且据此可以通过控制器来计算相应的用户的平均反射图案。相应用户的该典型的平均反射图案可以被存放在存储器中。替选地或补充地,测试图案也可以在工厂就被存储在控制器的存储器中。这些测试图案代表了对于用户来说普遍适用的运动过程。
18.可以是特别优选的是:在教导新用户的反射图案之前停止像动力辅助和/或制动辅助那样的舒适性功能和/或在教导新用户的反射图案之后开启像动力辅助和/或制动辅助那样的舒适性功能。这确保了:相对于常规车辆而言,未知用户无法使用电气化车辆的扩展功能。在教导反射图案作为测试图案的情况下才能确保:除了舒适性功能和/或制动辅助之外,提供所有安全相关的功能。
19.为了可确保最大程度的安全性并且同时能够在日常生活中无需经验地使用车辆,可以在控制器中存储反射图案,该反射图案包含位于接收器与用户之间的物体的运动和/或轮廓,使得在将测试图案与反射图案进行比较时识别出这种物体。例如,这样可以识别挂
在手柄上的包和/或在挂到车辆上的滚板上站立的儿童,所述包和儿童在所发出的信号及其反射中突出。为此,这种干扰性物体和儿童的图案可以在工厂或者通过教导被存储在控制器中。由于这些物体遮挡了反射图案的一部分,所以必须依据反射图案的未被遮挡的部分来实现与测试图案的比较。在此,必须在反射图案中提供足够的特征。如果情况不是如此,则控制器可以停止驱动装置和/或制动器的功能,使得车辆能像常规车辆那样被操作。
20.测试图案的特征可以基于用户距离,释放速度,腿距离,腿速度,物体、宠物和/或儿童的轮廓。替选地或补充地,也可以将用户限定的其它特征寄存在测试图案中。
21.易于理解的是,上文提到的并且随后还要阐述的特征不仅能以分别被说明的组合来应用,而且能以其它组合来应用。本发明的保护范围只通过权利要求书来限定。
附图说明
22.在下文,本发明依据实施例参考所属的附图更详细地予以阐述。
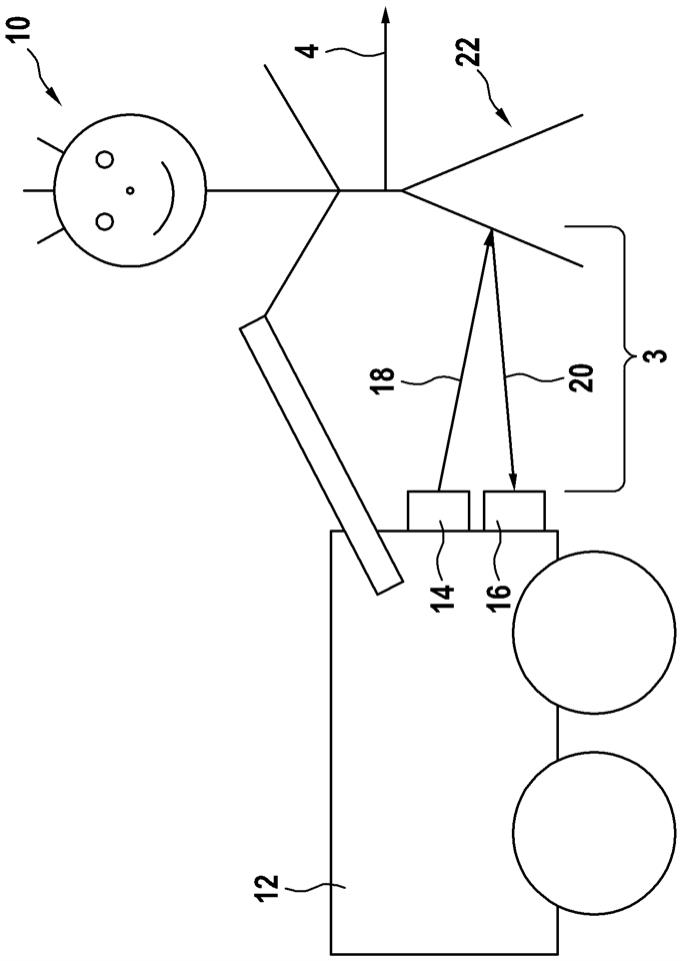
23.其中:图1示出了由用户推动的具有发送器和接收器的车辆;图2示出了具有反射图案的规定位置的用户;图3示出了关于距离和速度方面对反射图案的评估;以及图4示出了用于控制车辆的方法的流程图。
具体实施方式
24.图1示出了用户10,该用户推动车辆12,诸如童车或手推车。车辆12具有用于信号18的发送器14,该信号可以是调频连续波雷达信号。车辆12还具有接收器16,该接收器接收信号18的反射20。车辆包括控制器,该控制器与发送器14和接收器16连接,并且关于反射图案来对反射20进行分析。车辆12还包括:能量源、如蓄电池;以及驱动装置和/或制动装置。驱动装置在推动车辆12方面辅助用户10,并且确保了像动力辅助和制动辅助那样的舒适性功能和/或安全性功能。制动装置同样可以提供制动辅助。
25.优选地,将信号18发到用户10的双腿22和/或躯干上,并且对反射20进行分析。根据反射20,可以确定用户距离3和释放速度4,该用户距离说明了用户10距车辆12的绝对距离,该释放速度说明了用户10远离车辆12的绝对速度。该反射包含反射图案,该反射图案通过在用户10移动时双腿22的运动来被产生。通过控制器将该反射图案与存储在控制器中的测试图案进行比较。根据该比较,可以确定腿运动。
26.在图2中示出了用户10,该用户与车辆12相距用户距离3。通过如图1中发出的信号18来获得反射20,该反射由于用户10的运动而被加载反射图案。该反射图案可取决于方向和时间。带有该反射图案的反射20由接收器20接收。通过控制器分析的反射图案包含关于在用户10的身体上的至少两个或者如图2中至少三个位置101、102、103的信息。位置101、102、103位于用户10的不同身体部分上。例如,第一位置101可位于第一条腿221上,第二位置102可位于第二条腿222上,而第三位置103可位于用户10的躯干223上。双腿221、222分别实施交替运动,该交替运动表现为用户的行走或跑动。在此,双腿221、222至少暂时周期性地来回运动。双腿221、222彼此实施相对运动,所述相对运动具有彼此间的相对速度和相对距离的周期性变化。结合用户距离3,利用所述相对运动得出周期性变化的相应的腿距离5,
该腿距离是相应的腿221、222距车辆12的绝对距离。分别从第一位置101或第二位置102出发来测量腿距离5。附加地,相应的腿221、222的相对速度与释放速度4叠加以形成腿速度6,同样从相应的位置101、102出发来确定该腿速度。在躯干223的第三位置103处,确定用户距离3和释放速度4。该释放速度也可以被理解成车辆重心的速度。
27.依据位置101、102、103,可以确定关于用户10的行为的信息。该反射图案包含载有这些信息的所要评估的特征,其中控制器将该反射图案与存储在控制器中的测试图案关于这些特征方面进行比较。如果在反射图案中被分析的特征与存储在测试图案中的特征匹配,则可确认用户10在场。如果测试图案的特征与反射图案的那些特征不匹配,则确认用户10不在场。
28.在图2中,通过示意性的虚线锥来示出所发出的信号18和所接收到的反射20。接收器16和/或发送器14与控制器连接,并且将根据角度来被分辨的信息传送给控制器。用户10的身体可以根据垂直方向1和水平方向2来被划分,使得位置101、102、103可以被区分。通过这种至少在沿着用户10的身体的平面内的二维分辨,才能识别出不同的位置101、102、103。由此,反射图案获得至少二维结构,该二维结构优选地被划分成不同的扇区。也可以根据以例如球坐标和/或圆柱坐标的空间角度来进行分辨。可以通过使用多个发送器14来实现根据角度的区分,其中不同的发送器14优选地发出不同的信号18。例如,信号18可以在其相应的频率方面发生变化或者分别以经调制的标志符来被发出,这些信号在接收到之后借助于滤波器来予以区别。替选地或补充地,可以使用多个接收器16或具有多个接收单元的一个接收器16,用以根据角度来进行区分。也可在用户10的身体上定位多个位置101、102、103,使得每个通过角度分辨所获得的扇区都包括多个位置。经此,提高了测量精度。
29.图3示出了两张图表,这两张图表包含在双腿221、222上的位置101、102的腿速度6和腿距离5的示例性且理想化的曲线。
30.图3a针对每个位置221、222具有腿距离5沿着时间轴线7的周期性变化过程,其中双腿221、222的方向相反的运动得出两条有相移的曲线。相移约为180
°
并且在最大距离9与最小距离8之间变动。用户距离3可以是这些周期性曲线的偏移量。通过反射图案所测量到的在最小距离8与最大距离9之间的距离是双腿221、222的两个位置101、102彼此间的最大相对距离。如果两条曲线相交,则该相对距离为0。
31.图3b具有腿速度6的周期性曲线,这些周期性曲线关于时间轴线7来被绘制。这两条曲线代表相应的腿221、222的腿速度编号6,并且相对于彼此移动180
°
。相对于腿距离5而言,腿速度6的两条曲线移动了90
°
。腿速度6的曲线也可以被移动如下偏移量,该偏移量的值对应于释放速度4。相应的腿241、222的向前和向后运动得出朝向前方和朝向后方的速度,所述速度的速度矢量有符号变化。
32.图3a和3b的曲线是周期性成形的反射20,这些曲线是反射图案的部分。相移的数值、各个反射的幅度和/或各个反射的频率可以分别是反射图案的特征。
33.在图4中示出了该方法的示意性流程图。控制器根据反射20或反射图案来实施对位置101、102、103的确定200。如果位置101、102、103被确定,则可以据此来确定信息。控制器将根据反射20所确定的距离3、5和速度4、6与测试图案进行比较202。如果比较202得出:反射图案的至少特定数目的特征与测试图案匹配204,则确认在车辆12的区域内有用户10在场并且通过控制器来触发在场反应210。在场反应210可引起保持速度恒定和/或车辆的
加速过程。这可以在地面开始上升时对用户10进行辅助,因为用户10在这种情况下由于阻力增大而改变了他的运动过程,但是仍然在场。如果测试图案与反射图案之间的差异占主导,则通过控制器来确认差异206,并且通过控制器来实施不在场反应208。不在场反应例如表现为车辆12的制动过程。制动过程可引起速度降低或者甚至引起车辆12停下。在反射图案发生变化并且同时确认反射图案与测试图案匹配的情况下,同样可以实施在场反应210,如保持速度恒定和/或车辆12的加速过程。
34.在用户10移动时产生反射图案,其中例如双腿221、222具有相对于彼此方向相反的运动。用于实施比较202的测试图案存放在控制器的存储器中。控制器还可具有微处理器,借助于该微处理器来实施对于实施该方法来说所需的算法。测试图案对应于由用户10产生的典型反射图案。比较过程基于该算法。测试图案尤其可以通过关于位置101、102、103的速度和/或这些位置彼此间的距离和/或距车辆12的距离来被表征。优选地,依据这些特征来将反射图案与测试图案进行比较。
35.通过分析这些位置101、102、103的反射20,可以在有限的时间段内、例如在图3的周期性运动的至少一个周期内产生清晰的反射图案。优选地,可以将所教导的测试图案用于该比较。测试图案可以依据标志符、例如时间序列的统计时刻来被分配给特定用户10。以这种方式,跛行或残障人士的反射图案也可以明确地被分派给测试图案。替选地或补充地,测试图案也可以在工厂就被存储在控制器的存储器中。这些测试图案代表了对于用户10来说普遍适用的运动过程。替选地或补充地,对这些位置101、102、103的测量或者对测试图案的教导可以基于直接站在发送器的发送范围内的用户10,而无需标志符。
36.当例如有新用户开始移动车辆12时,为了优选地教导测试图案,启动自学习算法。依据数字标志符、尤其是智能电话的数字标志符来识别新用户10。也可能会使用指纹扫描或者其它唯一的个人特征。如果启动自学习算法,则可以依据如下反射图案来记录测试图案,该反射图案在开始使用车辆12之后的第一时间间隔内被记录。测试图案可以被临时存储在存储器中,使得在每次重新使用车辆12时必须重新读入该测试图案。替选地或补充地,该测试图案可以被持久存储。该测试图案也可以在智能电话上被传输或者被传输到云中,在该智能电话或云处,可以对所记录的图案进行分析并且得出测试图案。为了产生测试图案,可以在特定时间段、如运动的一个或多个周期内记录第一反射图案,并且据此可以通过控制器来计算相应的用户10的平均反射图案以及该用户的标志符。
37.像通过车辆12的驱动装置或制动器进行的动力辅助和/或制动辅助那样的舒适性功能可以在教导新用户10的反射图案之前不被开启。这样确保了车辆12的安全性,因为保证了只有在能够可靠地识别出用户10在场(该在场通过测试图案的存在来给出)的情况下力和转矩才能影响车辆。该在场确保了:用户10已经或者可以快速将手放在车辆12的手柄上并且可以行使对车辆12的控制。在教导新用户10的反射图案之后,开启车辆12的扩展功能。
38.对测试图案的扩展可以通过存储被放在接收器16与用户10之间的物体、动物和/或儿童的运动和/或轮廓来予以实现。在将测试图案与反射图案进行比较202时,在信号18和反射20中的这种障碍物干扰对用户在场的分析。例如,这种障碍物可以是挂在手柄上的包和/或在挂到车辆上的滚板上站立的儿童或动物。这种干扰性物体和儿童的图案可以在工厂或者通过教导被存储在控制器中。在由于这种障碍物而引起遮挡的情况下,依据反射
图案的未被遮挡的部分来进行与测试图案的比较。在此,必须在反射图案中提供足够的特征。如果情况不是如此,则控制器可以停止驱动装置和/或制动器的功能,使得车辆10能像常规车辆10那样被操作,这对应于安全状态。
39.如果现在反射图案和测试图案彼此匹配,则控制器依据算法假定在车辆12的区域有用户在场。在此,用户优选地与车辆12的手柄相距最多大约一臂长度。这些图案的特征的匹配204也可以只是部分地存在,以便确认用户在场。优选地,不必存在完全匹配204。这些图案的所有特征中的一半以上可以彼此匹配,以便确认用户在场。在反射图案与测试图案有差异206的情况下,确认用户不在场,其中一旦达到一定程度的差异206,差异206就可以被确认。在尤其是少于所有特征的50%匹配的情况下,情况可能如此。测试图案的特征可以基于用户距离,释放速度,腿距离,腿速度,物体、宠物和/或儿童的轮廓。替选地或补充地,也可以将用户限定的其它特征寄存在测试图案中。
40.图4中的方法可以作为计算机程序在车辆12的控制器上被实施。该方法的算法可以由该计算机程序来确定。替选地或补充地,该计算机程序可以在像智能电话那样的外部计算机上被实施。该计算机程序可以提供用户界面,使得用户可以影响该算法。
41.附图标记列表1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
垂直方向2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
水平方向3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
用户距离4
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
释放速度5
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
腿距离6
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
腿速度7
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
时间轴线8
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
最小距离9
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
最大距离10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
用户12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车辆14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
发送器16
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
接收器18
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
信号20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
反射22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
双腿101
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一位置102
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二位置103
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三位置200
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
确定位置202
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
将反射图案与测试图案进行比较204
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
匹配206
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
差异208
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
不在场反应
210
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
在场反应221
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一条腿222
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二条腿223
ꢀꢀꢀꢀꢀꢀꢀꢀ
躯干
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1